1. Introduction
In recent years, unmanned aerial vehicles (UAVs) have emerged as advanced aircraft that are widely utilized across various fields, including reconnaissance and surveillance [
1,
2], communication relay [
3,
4], disaster management [
5,
6], logistics delivery [
7,
8], and remote sensing [
9,
10]. Based on their endurance capabilities, UAVs are typically categorized into short-endurance and long-endurance types. Due to limitations in payload and energy configuration, short-endurance UAVs (SE-UAVs) exhibit slower flight speeds and shorter ranges [
11]. In contrast, long-endurance UAVs (LE-UAVs), with their extended flight durations and greater payload capacities, are capable of executing a more diverse array of extensive missions. Consequently, various countries have developed multiple models of LE-UAVs, such as the United States’s “MQ-1 Predator” and “RQ-4 Global Hawk” and China’s “Twin-Tailed Scorpion” and “Wing Loong” UAVs.
Currently, LE-UAVs possess a certain degree of autonomous intelligence, enabling them to autonomously perform operations such as cruising along a predetermined route and obstacle avoidance [
12]. However, LE-UAVs are still incapable of completely relying on onboard computers to autonomously execute complex tasks, such as strikes, reconnaissance, surveillance, and payload delivery. These tasks still require operators to send commands from ground control stations, a mode referred to as “human-in-the-loop” command and control [
13]. For instance, the RQ-4 Global Hawk UAV, produced by Northrop Grumman, is operated by both a pilot and an image sensor operator at the ground control station to complete its mission after takeoff [
14]. In this study, UAV operators are defined as ground control resources (GCRs).
The multi-UAV mission planning problem has been extensively studied. To enhance the efficiency and intelligent coordination of multiple UAVs in complex environments, researchers have proposed various mission planning algorithms, including mathematical programming algorithms, heuristic algorithms, swarm intelligence algorithms, and contract network algorithms [
15,
16,
17]. However, to the best of our knowledge, most current research is based on the assumption that UAVs possess complete autonomous intelligence and do not require GCR for control. In practical applications, LE-UAVs lack full autonomy and still require GCR control during the operational phase. Although a few studies [
18,
19,
20] have considered the need for GCR control, they have overlooked the heterogeneity of GCRs (differences in task execution capabilities) and the significant impact of fatigue on the effectiveness of UAV mission execution. In fact, the existing literature has demonstrated the crucial influence of GCR capabilities and fatigue levels on UAV operations [
21]. Furthermore, to the best of our knowledge, current research typically assumes that the communication link between UAVs and GCRs is a fixed match, meaning one or more UAVs are permanently connected to a specific GCR. In reality, there exists a flexible matching mechanism between LE-UAVs and GCRs. This allows for the selection of the most suitable GCR to control the UAV based on the current task information.
Assume that GCR1 controls tasks N1–N6 with the following profits: {10, 20, 10, 20, 10, 20}, and GCR2 controls tasks N1–N6 with the following profits: {20, 10, 20, 10, 20, 10}. If the influence of the GCRs on UAV task execution is not considered, the mission planning scheme is likely to be suboptimal, as shown in
Figure 1a, with an actual profit of only 80. In reality, the capabilities and fatigue levels of GCR significantly impact the profits of UAV task execution. Taking these factors into account, a fixed matching mechanism can yield a slightly better scheme, as shown in
Figure 1b, with a profit value of 100. By employing a flexible matching mechanism on this basis, an even better scheme can be obtained, as illustrated in
Figure 1c, with a profit value of 120, which is the highest among the three strategies.
Therefore, it is crucial to investigate how to optimize UAV mission planning in conjunction with GCR allocation. Based on customer information and UAV capabilities, each UAV should be assigned a rational sequence of tasks. At the same time, considering the varying capabilities and fatigue levels of each GCR, the most suitable GCR should be allocated for each task assigned to each UAV. This integrated approach aims to maximize the overall profit.
When the heterogeneity of GCR is not considered, the UAV mission planning problem can be simplified to the classic vehicle routing problem (VRP). As indicated in the reference, the VRP is classified as an NP-hard problem [
22]. However, when the heterogeneity of GCR is taken into account, the mission planning problem becomes significantly more complex, thus it also remains an NP-hard problem. In this scenario, the decision making for mission planning is coupled with the allocation of heterogeneous GCRs, resulting in an increased dimensionality of the decision space and a more complex problem structure. This introduces substantial challenges in modeling the problem and developing solution algorithms.
The main contributions of this paper can be summarized as follows: (1) Based on the relationship between LE-UAVs and GCR, as well as the practical applications of LE-UAVs, we propose the integrated optimization problem of multi-long-endurance UAV mission planning and multi-heterogeneous GCR assignment, termed H-G&U IOP. This problem is formulated as a mixed-integer linear programming (MILP) model, with the objective of maximizing overall profit. (2) To efficiently solve the MILP, we present a bi-level programming algorithm (BPA) based on a hybrid genetic algorithm (HGA) framework. The upper level of the BPA addresses mission planning, where we determine the task sequence for each UAV. We design three initial solution generation methods according to the problem characteristics and employ a local search–variable neighborhood descent (LS-VND) to improve solution quality. The lower level of the BPA focuses on heterogeneous GCR assignment, deciding the GCR for each task of each UAV. We apply a greedy algorithm combined with local search to calculate the optimal GCR assignment strategy for each chromosome (mission planning solution) in the HGA. Finally, the fitness function of the HGA aggregates the profit values from both levels, iterating until convergence is achieved. (3) Numerical experiments demonstrate that the BPA effectively solves the H-G&U IOP and outperforms the advanced optimization package CPLEX in terms of solution quality. Notably, for larger-scale instances, our algorithm obtains better solutions in 10 s than CPLEX does in 2 h.
The remainder of this paper is structured as follows.
Section 2 describes related work on UAV mission planning.
Section 3 introduces the problem description and mathematical model of the H-G&U IOP.
Section 4 presents the bilevel programming algorithm (BPA) developed to solve this problem.
Section 5 details the datasets used, the settings adopted in the BPA, and a comprehensive experimental evaluation.
Section 6 discusses the results and provides insights into future research directions. Finally,
Section 7 concludes this study.
2. Related Work
The multi-UAV mission planning problem can be formulated as a complex combinatorial optimization problem, incorporating factors such as time constraints, task decomposition, and dynamic reassignment, making it an NP-hard problem [
23]. UAV mission planning algorithms can generally be categorized into mathematical programming algorithms, swarm intelligence algorithms, and heuristic algorithms [
15].
Mathematical programming algorithms aim to obtain the optimal solution for an objective function under given constraints. Commonly used mathematical programming algorithms include integer programming algorithms [
24,
25] and dynamic programming algorithms [
26,
27]. Integer programming algorithms are a class of algorithms designed to solve integer programming problems, encompassing methods such as branch and bound, branch and cut, column generation, and row generation. Dynamic programming algorithms employ a bottom-up approach, solving a problem by breaking it down into a series of subproblems and incrementally solving these subproblems to address the overall problem. Due to their effective management of subproblems and utilization of overlapping subproblems, dynamic programming algorithms excel in handling complex issues.
Swarm intelligence algorithms are a class of optimization algorithms inspired by the collective behavior of natural systems. These algorithms solve complex problems by simulating the collaboration and information-sharing mechanisms observed in biological communities. Common swarm intelligence algorithms include ant colony optimization [
28], particle swarm optimization [
29], artificial bee colony [
30], and the multi-swarm fruit fly optimization algorithm [
31].
Heuristic algorithms are intuition- or experience-based methods designed to find feasible solutions to complex problems within a limited timeframe. These methods primarily focus on the objective function of the model, requiring less complexity. This allows for the attainment of good feasible solutions in a short period, making them practically viable for large-scale complex problems. Heuristic algorithms include genetic algorithm (GA) [
32], tabu search [
33], simulated annealing [
34], and fireworks algorithm [
16], among others. Notably, genetic algorithms, due to their superior computational robustness and ability to handle complex constraints, have seen various improved versions widely applied to address UAV mission planning problems.
Tal Shima et al. [
32] were the pioneers in applying genetic algorithms to solve UAV mission planning problems. They viewed the allocation of multiple UAVs executing multiple missions with multiple objectives as a novel combinatorial optimization problem and proposed a corresponding genetic algorithm to address it.
Wu et al. [
35] investigated the problem of finding optimal flyable trajectories for heterogeneous fixed-wing UAVs in multi-objective missions. They proposed a coupled distributed planning approach that integrates task allocation with trajectory generation. To search for the optimal solution, they introduced a distributed genetic algorithm and modified the chromosomal genes to adapt to the heterogeneous characteristics of the UAVs. Ye et al. [
36] addressed the cooperative multiple task assignment problem for heterogeneous fixed-wing UAVs performing the Suppression of Enemy Air Defense mission against multiple stationary ground targets. They proposed an improved GA utilizing a multitype gene chromosome encoding strategy to tackle this issue. Yu et al. [
37] investigated the cooperative mission planning problem for multiple heterogeneous UAVs in cross-regional joint operations. To address this challenge, they developed an improved GA and introduced a novel chromosome encoding format. Gao et al. [
38] addressed the issue of cooperative mission assignment for heterogeneous UAVs by developing a multi-objective optimization model that balances mission profit and loss, taking into account the probabilities of mission success and UAV loss. To tackle this problem, they proposed an improved multi-objective genetic algorithm (MOGA) that employs a natural chromosome encoding format and specially designed genetic operators. This approach effectively handles constraints such as munitions loading capacity, time, and priority.
The existing research literature on UAV mission planning generally assumes that UAVs possess a high degree of autonomous intelligence, thereby overlooking the factor of GCRs. However, in practical military applications, LE-UAVs have limited autonomous intelligence and still require control from GCRs. To the best of our knowledge, the following literature has considered the relationship between GCRs and multiple UAVs in mission planning.
Ramirez et al. [
18] conducted an in-depth study on the cooperative multiple-task assignment problem and proposed a new MOGA to address complex mission planning problems involving multiple UAVs and GCRs. This mission planning system takes into account the communication distance constraints between UAVs and GCRs, as well as the resource constraints of GCRs. It not only allocates each task to a specific UAV but also ensures that each UAV is assigned to a specific GCR for control. In reference [
19], they model the multi-UAV mission planning problem as a constraint satisfaction problem (CSP) and propose a hybrid multi-objective evolutionary algorithm combined with a constraint satisfaction problem model (MOEA-CSP) to solve it. They extend non-dominated sorting genetic algorithm-II to handle constraints in the fitness function and certain settings, as well as genetic operators, aiming to reduce the search space of the problem. This study also involves a set of heterogeneous UAVs and GCRs and considers communication constraints between UAVs and GCRs, as well as the limited control resources of the GCR. In reference [
20], they also addressed the problem of multi-UAV mission planning, with a focus on improving the efficiency and effectiveness of MOEA. They proposed a weighted random generator to enhance MOEA. This generator employs three strategies—arithmetic, harmonic, and geometric—to create new individuals, thereby improving the diversity and convergence performance of the algorithm. The study also considered the constraints between GCRs and UAVs. Moreover, multiple UAVs are coordinated and commanded by various GCRs to execute missions collaboratively.
However, in planning multi-UAV missions, the aforementioned literature overlooks the heterogeneity of GCRs—differences in their capabilities to execute tasks—and the significant impact that fatigue can have on the effectiveness of UAV mission execution. In reality, the existing literature has demonstrated that the capabilities and fatigue levels of GCRs play a crucial role in operating UAV tasks [
21]. More skilled GCRs achieve better task outcomes within the same time frame. Moreover, as the workload increases, GCRs experience growing fatigue. With increasing fatigue, the accuracy of GCRs in completing tasks declines rapidly, and consequently, the profit decreases.
A summary of papers on UAV mission planning is provided in
Table 1. To the best of our knowledge, current studies assume a fixed 1-to-1 or n-to-1 matching mechanism between UAVs and GCRs, where one or multiple UAVs are continuously controlled by a single GCR. However, in reality, UAVs possess a certain level of autonomous intelligence, allowing them to fly autonomously without being continuously controlled. Ground control intervention is only required when performing tasks at customer locations. Any GCR can connect to any UAV via satellite. There exists a flexible many-to-many (n-to-n) matching mechanism between UAVs and ground control stations, as depicted in
Figure 2. Therefore, it is entirely feasible to select the most suitable GCRs to control the UAV based on the current task information.
3. Problem Description and Formulation
In this section, we formally define the H-G&U IOP and then formulate a MILP for the problem.
3.1. Problem Description
Let be a complete directed graph, where the node set is and the arc set is . Node 0 represents the airport where the UAV takes off and lands and is the location from which the UAV departs and returns. Let represent the set of profitable nodes, which we call customers.
Let represent the planning horizon, where , . We consider a set of identical UAVs departing from the airport at the time to serve a specific customer. The UAV flies for a duration not exceeding and returns to the terminal before time . Once the UAV starts servicing a customer, the process cannot be interrupted. The service time at customer , i.e., the execution time of the task, is . The flight time required to travel from node to node is . The number of resources required for customer is . The resources that a UAV can carry are . The capability of UAV for customer can be denoted as .
Let
represent the set of GCRs. During the flight to node
, the UAV can fly autonomously without GCR control. However, when servicing the customer
, a GCR is required for the UAV to perform the task. Each GCR has different capabilities for each customer. For the customer, the initial capability value of the GCR can be denoted as
. The capability value of the GCR gradually decreases over time as it continues to operate, following a variation function
. The definition of
is provided in Equation (1).
where
is a user-defined parameter that represents the descent rate of the GCR’s capability. When its value is increased, the capability value of GCRs rapidly decreases over time.
The objective of mission planning is to maximize the total profit from all tasks. The profit derived from completing a task depends on the customer’s initial value, the time it takes for the UAV to reach the customer, the UAV’s capability, and the capability of the GCRs.
where
,
, and
are weights of the arrival time, the capability of the UAV, and the capability of the GCRs, respectively.
represents the initial value of customer
.
is a monotonically decreasing function of time, which can be defined as in Equation (3).
where
is a user-defined parameter that represents the descent rate of the task’s profit. When its value is increased, the profit rapidly decreases over time.
Before formulating the mode of the H-G&U IOP, some assumptions are listed as follows:
There is only one airport. And all UAVs depart from this airport and return to the same airport after completing their tasks;
The service time and resource requirements of customers are certain;
GCRs are connected to UAVs via satellites. The GCRs, UAVs, and satellites are in real-time visibility, and their signals are not subject to interference;
Within a given time, once a UAV starts serving a customer, it cannot be interrupted.
Any GCR can only control one UAV at a time, and each UAV can only be controlled by one GCR at a time.
The fundamental assumptions underlying the H-G&U IOP are designed to simplify its complexity while preserving its core elements. This allows us to focus on investigating how to enhance the overall effectiveness of multiple UAVs through the implementation of rational control strategies.
3.2. Model Formulation
Traditional UAV mission planning primarily focuses on determining the sequence of target point visits and path planning. Building on this foundation, we also incorporate the allocation of GCRs into the decision-making process. Additionally, we take into account constraints such as the UAV’s flight duration and payload capacity. A mathematical model is constructed with the objective of maximizing the total profit from all tasks.
Mathematical Model
Subject to the following:
The objective function (4) maximizes the overall profit of system, where is the cost of the UAVs’ flight time from takeoff to landing. Constraint (5) defines the calculation method of parameter in . Constraint (6) defines the calculation method of parameter in . Constraints (7)–(8) ensure that each aircraft departs from the airport and eventually returns to the airport. Constraint (9) is the conservation of flow for each customer node. Constraint (10) ensures that one and only one UAV traverses each customer. Constraints (11)–(12) couple the routing decision with temporal scheduling. Constraint (11) states that if , then the arrival time of the first customer traversed by UAV from airport 0 must be equal to or greater than the take-off moment plus the flight time from airport 0 to customer . Constraint (12) ensures that if , i.e., the UAV visits customer directly after departing from customer , then the arrival time of UAV at must be equal to or greater than the time of arrival at plus the service time of customer and the flight time between customer and customer . Constraint (13) ensures that the variable of a virtual node that has not been visited by a UAV is zero. Constraint (14) is the flight duration limit, which ensures that each UAV is able to return to the airport. Constraint (15) ensures that each UAV has the sufficient resources required to satisfy the customer nodes it traverses. Constraint (16) denotes the coupling of the decision of GCR allocation with the time scheduling, where the GCR starts serving the customer on the UAV at a time equal to the time the UAV reaches the customer . Constraint (17) ensures that there is one and only one GCR controlling the UAV to serve customer . Constraint (18) ensures that the GCR can only control one UAV at the same moment. Constraints (19)–(21) define the domains of decision variables.
It should be noted that the objective function (4) is nonlinear because it contains fractional and exponential terms. For this type of nonlinear objective function, CPLEX is unable to solve it. Therefore, we linearize it by using the precomputation and lookup table method to enable successful solving by CPLEX. Since we adopt a time-indexed modeling approach, time is discrete, i.e.,
. Consequently, we can precompute the values of the fractional and exponential terms at each integer time point and store them. In the model, whenever we need to use a specific time
, we can directly call the precomputed values.
The construction of the lookup tables for the exponential and fractional terms is shown in Equations (22) and (23), respectively. Then, when building the model, we directly use the precomputed values from the lookup tables to compute and , as shown in Equations (24) and (25). Finally, the objective function can be linearized as shown in Equation (26).
4. Proposed Method
The model developed in
Section 3 can be solved for small-scale instances using readily available solvers such as CPLEX. To address large-scale instances, we developed a bi-level programming algorithm (BPA) based on the hybrid genetic algorithm (HGA) framework.
As illustrated in
Figure 3, the framework of the entire algorithm is depicted. The upper level of the BPA is dedicated to mission planning. At this level, we determine the task sequence for each UAV. Specifically, we designed three methods for generating initial solutions based on the problem characteristics. Then, we use local search–variable neighborhood descent (LS-VND) to improve the solution quality. Following the upper-level algorithm, we obtain the mission planning schemes for the UAVs. Here, each chromosome represents a mission planning scheme. On this basis, we proceed with the lower level of the BPA—the allocation of heterogeneous GCRs. We employ a greedy algorithm combined with local search to compute the optimal GCR allocation strategy for each chromosome in the HGA. Through the lower-level algorithm, we determine the GCR for each task of each UAV. Finally, we use the fitness function of the HGA to perform a weighted summation of the profit values from both levels. The HGA iterates through operations such as crossover, recombination optimization, mutation, and repair until convergence conditions are met.
In
Section 4.1, we introduce the encoding design of the BPA solution. In
Section 4.2, we discuss the upper level—mission planning. In
Section 4.3, we present the lower level—GCR allocation. Finally, in
Section 4.4, we describe the evolutionary process of the HGA.
4.1. Solution Encoding Design
The construction of the solution for the H-G&U IOP problem is illustrated in
Figure 4. The solution is represented as
, where the total profit is calculated as
.
. This indicates that the objective value of the solution is the sum of the upper-level profit
and the lower-level profit
, minus the weighted trajectory cost
. The calculation formula for
is derived from Equation (27) in
Section 4.2, while the calculation for
is obtained from Equation (28) in
Section 4.3. The variable
represents the task sequence that each GCR needs to manage. A chromosome is a collection composed of multiple subchromosomes, denoted as
. Each subchromosome corresponds to a mission planning scheme for a single UAV.
Within each subchromosome, the task sequence (i.e., the list of customer visits) is encoded using integers, where positive integers represent customers and “0” represents the UAV airport. The variable indicates the demand of all customers in the planned route of each UAV, represents the flight duration of each UAV from takeoff to landing, and denotes the sequence of times at which each UAV takes off and reaches each node.
4.2. Upper Level—Mission Planning
In the upper level of the BPA, we primarily focus on mission planning. In this level, the objective function
is defined as
where
is derived from
and other parameter information aligns with the 3.2 MILP model. The variable
is decoded from the task sequence in
.
In
Section 4.2.1, we introduce three initial solution generation strategies. In
Section 4.2.2, we employ LS-VND to enhance solution quality and accelerate algorithm convergence. In
Section 4.2.3, we discuss the design of crossover, recombination, and mutation operators for the chromosomes.
4.2.1. Initial Solution Generation Strategies
The quality of the initial solutions is crucial for the BPA’s performance and convergence speed. To improve the quality and diversity of the initial population, we designed the following three strategies based on problem characteristics:
- A.
Randomized nearest neighbor
The nearest neighbor method is commonly employed in VRP problem. We implemented several improvements based on this approach. Initially, we select a node A with the highest value from the airport. Subsequently, with a 90% probability, we apply a greedy strategy to choose the next node with the highest value starting from node A, and with a 10% probability, we randomly select a node. This process is repeated until the UAV can no longer support reaching the next node due to range or resource constraints, at which node it returns to the airport.
- B.
Randomized average generation
The profit from UAV mission completion is time-dependent; the quicker all tasks are completed, the higher the profit. Therefore, we aim to evenly distribute customers among the available UAVs to complete all tasks as rapidly as possible. The process is as follows:
Shuffle the task sequence;
Sequentially assign customers to the UAVs in set U until each UAV has been assigned a customer. Remove the selected customer from the sequence;
Distribute the remaining customers starting from the first UAV in U, repeating Step 2 until all customers are assigned;
Output the task sequence for each UAV.
- C.
Distributed nearest neighbor
To ensure an even distribution of tasks among the UAVs and enhance the overall task execution efficiency, we sequentially assign the point with the highest value from the current node for each UAV. The specific steps are as follows:
Following the order in set U, each UAV sequentially selects customers using the nearest neighbor method from the task sequence. Remove the selected customer from the sequence;
Repeat Step 1 until the task sequence is empty;
Output the task sequence for each UAV.
4.2.2. LS-VND Acceleration Strategy
The objective of the LS-VND is to systematically alter the neighborhood structure set of the current solution during the search process, thereby expanding the search scope and identifying better solutions. For the task sequence of each UAV, we implement the LS-VND algorithm to explore the neighborhood. Local search is a sequence search algorithm used to explore three fundamental neighborhood structures [
39], described as follows:
Reinsertion: This involves repositioning a node from one location in the task sequence to another, as depicted in
Figure 5a. The neighborhood set in this structure is defined by
;
Exchange: This involves swapping two nodes between two positions in the task sequence, as shown in
Figure 5b. The neighborhood set in this structure is defined by
;
Reversal: This involves reversing the nodes within a portion of the task sequence, as illustrated in
Figure 5c. The neighborhood set in this structure is defined by
.
The specific algorithm is detailed in Algorithm 1:
| Algorithm 1 LS-VND framework |
| 1: |
|
| 2 | do |
| 3 |
|
| 4 | then |
| 5 |
|
| 6 | else |
| 7 | |
| 8 | end while |
For each new task sequence generated by LS-VND, we use to evaluate the quality of these sequences. Additionally, we update the task sequences based on . From an algorithmic perspective, the adaptability of LS-VND aims to enhance the intensification and diversification of the HGA. The core concept of the LS-VND algorithm is to systematically alter the neighborhood structure of the current solution, expand the search scope, and then identify the current optimal solution through the local search algorithm.
4.2.3. Design of Crossover, Recombination, and Mutation Operators
We designed a series of crossover, recombination, and mutation operators based on the problem characteristics to enhance the solution quality and algorithm efficiency.
Subroute Exchange Crossover (SEC): A subroute is randomly selected from a parent chromosome , and a fragment from this subroute is chosen. The elements in are then removed from parent chromosome . The fragment is randomly inserted into , resulting in the offspring chromosome . The same method is applied to generate the offspring chromosome .
Subroute Single-Point Crossover (SSPC): A subroute is randomly selected from parent chromosome , and a fragment from this subroute is chosen. The elements in are then removed from parent chromosome . Subsequently, the elements in are individually and randomly inserted into , resulting in the offspring chromosome . The same method is applied to generate the offspring chromosome .
After crossover, the newly formed offspring chromosomes undergo further crossover operations, referred to as the recombination optimization operator (ROO). These operations are repeated to find better offspring.
The ROO for the offspring chromosome
is detailed in Algorithm 2:
| Algorithm 2 ROO framework |
| 1: | ) |
| 2 | if random() < 0.9 then |
| 3 | for _ in range(3) do |
| 4 | |
| 5 | then |
| 6 | |
| 7 | end if |
| 8 | end for |
| 9 | else |
| 10 | for _ in range(3) do |
| 11 | ) |
| 12 | then |
| 13 | |
| 14 | end if |
| 15 | end for |
| 16 | end if |
To enhance the exploration capability of the genetic algorithm, we designed a simple random mutation: A subroute is randomly selected from the chromosome, a point within this subroute is randomly chosen, and another subroute is randomly selected. The chosen point is then inserted into a random position within .
4.3. Lower Level—GCR Allocation
Following the decisions made in the upper-level planning, we obtain the mission planning scheme for each UAV. However, in practical applications, we must also consider the rational allocation of GCR for these missions that require control. Therefore, in the lower level of the BPA, we perform heterogeneous GCR allocation. The objective function
at this level is defined as
where
is derived from
and other parameter information aligns with the 3.2 MILP model.
We propose a greedy algorithm combined with local search. In
Section 4.3.1, we introduce the initial allocation based on the greedy algorithm. Then, in
Section 4.3.2, we use local search to improve the solution quality.
4.3.1. Initial Allocation
Based on the upper-level mission planning scheme, we initially adopt a greedy algorithm to obtain the initial allocation scheme for heterogeneous GCRs. The main idea of this method is to allocate GCRs to all tasks in chronological order, prioritizing the GCR that maximizes the profit for tasks that start earlier. The specific steps are as follows:
Sort all tasks according to in ascending order of start time, creating the task set . The GCR set is , and is initialized. For the task at the top of , the following allocation procedure is applied:
- (a)
Calculate the profit value of all GCRs for the current task . Sort the GCRs in descending order of profit value to obtain the sorted list ;
- (b)
Allocate the GCR with the highest profit value to the task . If this GCR is free, add the allocation result to . If the GCR is occupied, i.e., the previous task allocated to has not yet finished at the start time of , choose the next GCR in until the allocation is successful;
- (c)
Proceed to allocate the next task.
Iterate the allocation process until all tasks are assigned a GCR, resulting in the final Gantt chart work schedule of GCRs.
The algorithm is as detailed in Algorithm 3:
| Algorithm 3 Heterogeneous GCR initial allocation framework |
| 1: | initial sequence |
| 2 | do |
| 3 | |
| 4 | sort in descending order according to profit |
| 5 | do |
| 6 | then |
| 7 | |
| 8 | else |
| 9 | continue |
| 10 | end if |
| 11 | end for |
| 12 | end for |
4.3.2. Local Search Optimization Strategy
After obtaining the initial allocation scheme for heterogeneous GCRs using the greedy algorithm, we employ a local search method based on exchange neighborhood structures to improve the solution quality. The specific steps are as follows:
Starting from
, traverse all tasks and define the set of overlapping tasks in time as a conflict set
. As shown in
Figure 6, tasks {3, 5, 7} form one conflict set, and tasks {2, 4, 6, 8} form another. Additionally, within a conflict set, a task for the same UAV can only appear once. Ultimately, we obtain a list of all conflict sets
;
For each subset in , use a greedy iterative method to search the neighborhood, continuously exchanging their GCRs until no better solution can be found;
Based on the local search results, update .
The algorithm is as detailed in Algorithm 4:
| Algorithm 4 Local search framework |
| 1: |
|
| 2 | do |
| 3 | 1 |
| 4 | do |
| 5 | 0 |
| 6 | |
| 7 | |
| 8 | |
| 9 |
then |
| 10 | |
| 11 | end if |
| 12 | end while |
| 13 | end for |
4.4. Evolutionary Process of the HGA
We integrated a series of advanced management strategies to enhance the performance of the GA. Based on the problem characteristics, we designed customized crossover, recombination, and mutation operations, as well as repair operators. Additionally, we introduced an elitism strategy and a simulated annealing mechanism, where the simulated annealing mechanism determines the acceptance probability of inferior solutions in the offspring. These mechanisms not only accelerate the convergence of the algorithm but also enhance its exploration capabilities.
This section describes the evolutionary process of the HGA. The crossover, recombination, and mutation operations, which are primarily aimed at the upper level of the BPA, were already discussed in
Section 4.2 and are not reiterated here. Instead, we focus on the elitism strategy, fitness function, simulated annealing mechanism, and repair operators.
4.4.1. Elitism Strategy
In the HGA framework, the strategy for generating offspring is diversified and mainly divided into two categories: elitism and general propagation. These strategies work together to balance the exploration and exploitation capabilities of the algorithm.
Elitism: This refers to directly retaining a portion of the chromosomes with the highest fitness in each generation, ensuring that the algorithm does not lose the excellent solutions it has already found. This strategy is a common technique in genetic algorithms and helps in the rapid convergence of the algorithm.
General Propagation: The remaining chromosomes in the population undergo general propagation. A binary tournament selection method is used to select two parent chromosomes, which then undergo crossover, recombination, mutation, and repair operations to generate two offspring chromosomes. The general propagation process is influenced by the crossover rate. This process aims to introduce new gene combinations into the population, helping the algorithm avoid premature convergence to local optima.
4.4.2. Fitness Function
In this section, we introduce the fitness function used in the HGA. This function is utilized to evaluate the performance of solutions or chromosomes, playing a pivotal role in the search process of the genetic algorithm and the quality of the final results. The primary task of the fitness function is to provide a quantifiable score that indicates the quality of the chromosomes, thereby guiding the algorithm towards more optimal solutions.
In the HGA, the fitness mainly consists of two components: one part is the profit, represented as and in the solution; the other part is the penalty value for UAV constraint violations (), and the trajectory cost ().
The fitness function can be expressed as
The calculation of
is as follows:
where
is the number of UAVs in this chromosome,
represents the resource demand of the UAV
task sequence in this chromosome,
is the rated capacity of the UAV,
is the flying duration of UAV
,
is the rated flight duration of the UAV
,
is the current iteration count, and
is the total number of iterations.
The coefficient
is calculated as follows:
where
is the total profit value
of the best solution in the current population,
is three times the sum of the initial values of all customers, and
is a very small positive number to ensure that the denominator is not zero.
As the iterations progress, the weight of the penalty term gradually increases. This means that the algorithm will progressively increase the penalty for violations while searching for solutions that meet all constraints. This mechanism aids the algorithm in quickly finding solutions that satisfy all constraint conditions.
4.4.3. Simulated Annealing Mechanism
We drew inspiration from the “temperature” parameter concept in the simulated annealing algorithm: the higher the temperature, the greater the probability of accepting poorer solutions; as the temperature gradually decreases, the probability of accepting poorer solutions diminishes, and the algorithm stabilizes, focusing more on finding the optimal or near-optimal solutions. This strategy allows some individuals with lower fitness to remain in the population, maintaining population diversity and avoiding premature convergence.
The probability of accepting poorer solutions,
, is set as follows:
By skillfully balancing convergence and diversity, our designed hybrid genetic algorithm can efficiently solve the mission planning problem.
4.4.4. Repair Operator
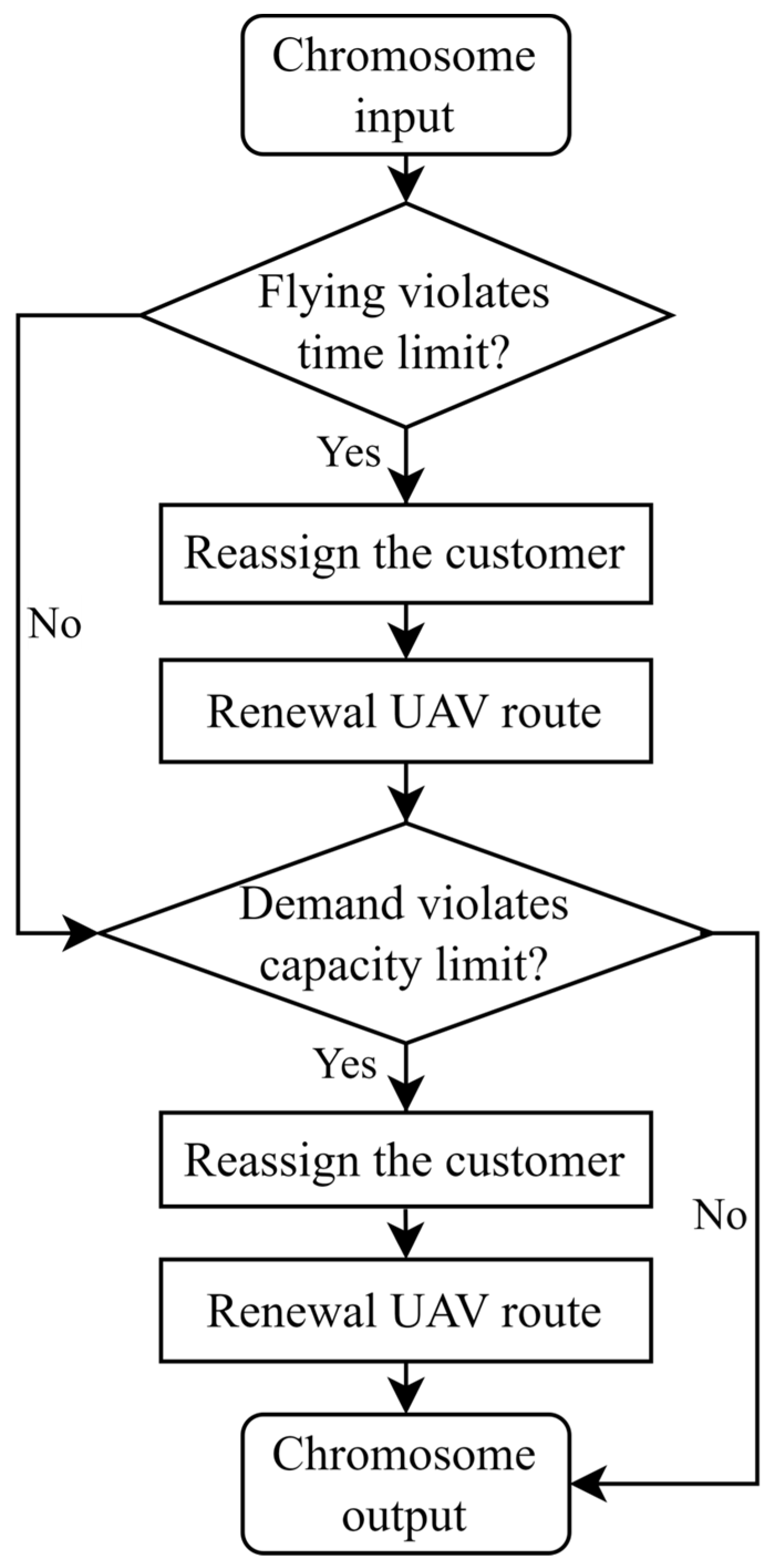
The repair operator plays a crucial role in the HGA, ensuring the diversity and quality of the population. Its task is to adjust solutions that do not meet the constraint conditions (i.e., infeasible chromosomes) so that they satisfy the problem’s actual constraints. In the HGA, we designed a route repair operator.
For the H-G&U IOP problem, the primary goal of the route repair operator is to ensure that each UAV’s route conforms to the constraints regarding demand and flight duration. For those infeasible solutions, the repair operator restores chromosome feasibility by selecting the routes with the highest demand and flight duration and appropriately redistributing nodes between them. This redistribution is accomplished through a series of insertion and deletion operations, as illustrated in
Figure 7. For routes that violate the flight duration constraints, the repair operator removes the last customer from the route and reallocates it to the UAV with the shortest flight time; for routes that violate capacity constraints, the operator reallocates the customer to the UAV with the smallest demand.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}