
Finite Time-Adaptive Full-State Quantitative Control of Quadrotor Aircraft and QDrone Experimental Platform Verification


Abstract
1. Introduction
- Based on an adaptive time-varying BLF, we propose a novel adaptive full-state quantization control strategy for a class of quadrotor UAV systems with unknown model parameters and random external disturbances to constrain the states within predefined time-varying boundaries. The proposed control algorithm not only compensates for the quantization effects, but also guarantees sufficient precision.
- To cope with the problem of signal discontinuity that may occur during state quantization, this study proposes an error system based on the definition of the quantization error signal. With this method, the effect of state quantization can be mitigated and the overall performance of the control system can be improved. At the same time, an adaptive control method is used to cope with the nonlinear characteristics and unknown disturbances existing in the system, which is able to adjust the control parameters based on real-time system feedback and enhance the robustness of the system.
- By combining the definition of the filtered tracking error with an adaptive time-varying BLF, the controller design process is simplified. This approach reduces the number of design parameters while achieving full-state constraint performance of the control system, enhancing both tracking accuracy and anti-interference capability. The stability of the proposed scheme is rigorously demonstrated using Lyapunov stability theory, and its effectiveness is validated through physical experimental simulations.
2. Problem Formulation and Preliminaries
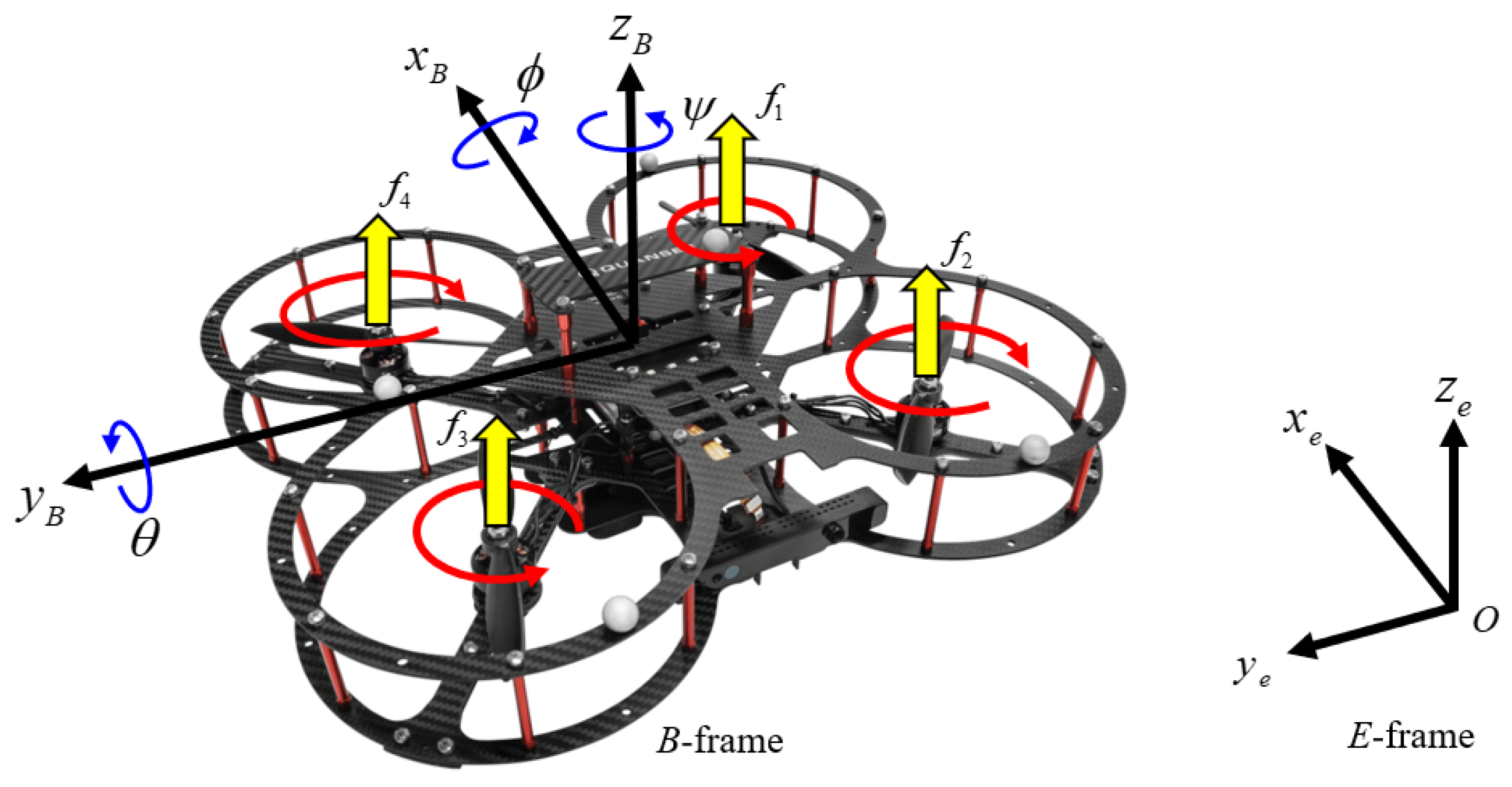
2.1. System Model of Quadrotor
2.2. Finite-Time Stability
2.3. Novel Barrier Lyapunov Function
2.4. Quantized Control System
3. Controller Design and Stability Analysis
3.1. Controller Design
3.2. Proof of Stability
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Y.X.; Yang, G.H. Adaptive asymptotic tracking control of uncertain nonlinear systems with input quantization and actuator faults. Automatica 2016, 72, 177–185. [Google Scholar] [CrossRef]
- Wang, F.; Chen, B.; Liu, X.; Lin, C. Finite-time adaptive fuzzy tracking control design for nonlinear systems. IEEE Trans. Fuzzy Syst. 2017, 26, 1207–1216. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Tong, S. Finite-time adaptive fuzzy output feedback dynamic surface control for MIMO nonstrict feedback systems. IEEE Trans. Fuzzy Syst. 2018, 27, 96–110. [Google Scholar] [CrossRef]
- Zhou, J.; Wen, C.; Yang, G. Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal. IEEE Trans. Autom. Control 2013, 59, 460–464. [Google Scholar] [CrossRef]
- Hayakawa, T.; Ishii, H.; Tsumura, K. Adaptive quantized control for nonlinear uncertain systems. Syst. Control Lett. 2009, 58, 625–632. [Google Scholar] [CrossRef]
- Xing, L.; Wen, C.; Zhu, Y.; Su, H.; Liu, Z. Output feedback control for uncertain nonlinear systems with input quantization. Automatica 2016, 65, 191–202. [Google Scholar] [CrossRef]
- Hua, C.; Jiang, A.; Li, K. Adaptive neural network finite-time tracking quantized control for uncertain nonlinear systems with full-state constraints and applications to QUAVs. Neurocomputing 2021, 440, 264–274. [Google Scholar] [CrossRef]
- Fu, M.; Xie, L. The sector bound approach to quantized feedback control. IEEE Trans. Autom. Control 2005, 50, 1698–1711. [Google Scholar]
- Zhang, G.; Huo, X.; Liu, J.; Ma, K. Adaptive control with quantized inputs processed by lipschitz logarithmic quantizer. Int. J. Control. Autom. Syst. 2021, 19, 921–930. [Google Scholar] [CrossRef]
- Shao, X.; Xu, L.; Zhang, W. Quantized control capable of appointed-time performances for quadrotor attitude tracking: Experimental validation. IEEE Trans. Ind. Electron. 2021, 69, 5100–5110. [Google Scholar] [CrossRef]
- Yang, W.; Cui, G.; Yu, J.; Tao, C.; Li, Z. Finite-time adaptive fuzzy quantized control for a quadrotor UAV. IEEE Access 2020, 8, 179363–179372. [Google Scholar] [CrossRef]
- Guo, X.; Wang, C.; Dong, Z.; Ding, Z. Adaptive containment control for heterogeneous MIMO nonlinear multiagent systems with unknown direction actuator faults. IEEE Trans. Autom. Control 2022, 68, 5783–5790. [Google Scholar] [CrossRef]
- Guo, X.; Wang, C.; Liu, L. Adaptive fault-tolerant control for a class of nonlinear multi-agent systems with multiple unknown time-varying control directions. Automatica 2024, 167, 111802. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, H.; Ma, H.; Zhou, Q.; Yu, Z. Distributed adaptive consensus tracking control for nonlinear multi-agent systems with state constraints. Appl. Math. Comput. 2018, 326, 16–32. [Google Scholar] [CrossRef]
- Yang, W.; Pan, Y.; Liang, H. Event-triggered adaptive fixed-time NN control for constrained nonstrict-feedback nonlinear systems with prescribed performance. Neurocomputing 2021, 422, 332–344. [Google Scholar] [CrossRef]
- Cai, X.; Wang, C.; Wang, G.; Li, Y.; Xu, L.; Zhang, Z. Distributed low-complexity output feedback tracking control for nonlinear multi-agent systems with unmodeled dynamics and prescribed performance. Int. J. Syst. Sci. 2019, 50, 1229–1243. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Jing, Y. Adaptive neural networks finite-time tracking control for non-strict feedback systems via prescribed performance. Inf. Sci. 2018, 468, 29–46. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Jing, Y.; Chen, X.; Qiu, J. Direct adaptive preassigned finite-time control with time-delay and quantized input using neural network. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 1222–1231. [Google Scholar] [CrossRef]
- Zhou, T.; Liu, C.; Liu, X.; Wang, H.; Zhou, Y. Finite-time prescribed performance adaptive fuzzy control for unknown nonlinear systems. Fuzzy Sets Syst. 2021, 402, 16–34. [Google Scholar] [CrossRef]
- Liu, C.; Liu, X.; Wang, H.; Zhou, Y.; Lu, S. Finite-time adaptive tracking control for unknown nonlinear systems with a novel barrier Lyapunov function. Inf. Sci. 2020, 528, 231–245. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Zhu, G.; Chen, X.; Li, Z.; Wang, C.; Su, C.Y. Compound adaptive fuzzy quantized control for quadrotor and its experimental verification. IEEE Trans. Cybern. 2020, 51, 1121–1133. [Google Scholar] [CrossRef] [PubMed]
- Sun, K.; Qiu, J.; Karimi, H.R.; Fu, Y. Event-triggered robust fuzzy adaptive finite-time control of nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 2020, 29, 1460–1471. [Google Scholar] [CrossRef]
- Han, X.; Ma, Y. Sampled-data robust H∞ control for TS fuzzy time-delay systems with state quantization. Int. J. Control Autom. Syst. 2019, 17, 46–56. [Google Scholar] [CrossRef]
- Polycarpou, M.M.; Ioannou, P.A. A robust adaptive nonlinear control design. In Proceedings of the 1993 American Control Conference, San Francisco, CA, USA, 2–4 June 1993; IEEE: New York, NY, USA, 1993; pp. 1365–1369. [Google Scholar]
- Lin, W.; Qian, C. Adaptive control of nonlinearly parameterized systems: The smooth feedback case. IEEE Trans. Autom. Control 2002, 47, 1249–1266. [Google Scholar] [CrossRef]
- Zhang, X.; Lin, Y. Adaptive control of nonlinear time-delay systems with application to a two-stage chemical reactor. IEEE Trans. Autom. Control 2014, 60, 1074–1079. [Google Scholar] [CrossRef]
- Rabah, M.; Rohan, A.; Mohamed, S.A.S.; Kim, S.H. Autonomous Moving Target-Tracking for a UAV Quadcopter Based on Fuzzy-PI. IEEE Access 2019, 7, 38407–38419. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Values | Units |
|---|---|---|
| m | kg | |
| k | ||
| l | m | |
| Section | Values |
|---|---|
| Barrier Lyapunov function | |
| Quantizer parameters | |
| Non-negative function | |
| Controller parameters |
| Index | Proposed Scheme | FLS-PID | Variation | |
|---|---|---|---|---|
| Data size |
19,889 46,478 47,573 41,587 |
60,000 60,000 60,000 60,000 | ||
| Maximum tracking error | ||||
| Root mean square error |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Luo, P.; Li, Z.; Zhu, G.; Zhang, X. Finite Time-Adaptive Full-State Quantitative Control of Quadrotor Aircraft and QDrone Experimental Platform Verification. Drones 2024, 8, 351. https://doi.org/10.3390/drones8080351
Li H, Luo P, Li Z, Zhu G, Zhang X. Finite Time-Adaptive Full-State Quantitative Control of Quadrotor Aircraft and QDrone Experimental Platform Verification. Drones. 2024; 8(8):351. https://doi.org/10.3390/drones8080351
Chicago/Turabian StyleLi, He, Peng Luo, Zhiwei Li, Guoqiang Zhu, and Xiuyu Zhang. 2024. "Finite Time-Adaptive Full-State Quantitative Control of Quadrotor Aircraft and QDrone Experimental Platform Verification" Drones 8, no. 8: 351. https://doi.org/10.3390/drones8080351
APA StyleLi, H., Luo, P., Li, Z., Zhu, G., & Zhang, X. (2024). Finite Time-Adaptive Full-State Quantitative Control of Quadrotor Aircraft and QDrone Experimental Platform Verification. Drones, 8(8), 351. https://doi.org/10.3390/drones8080351