
Message Passing Detectors for UAV-Based Uplink Grant-Free NOMA Systems

Abstract
1. Introduction
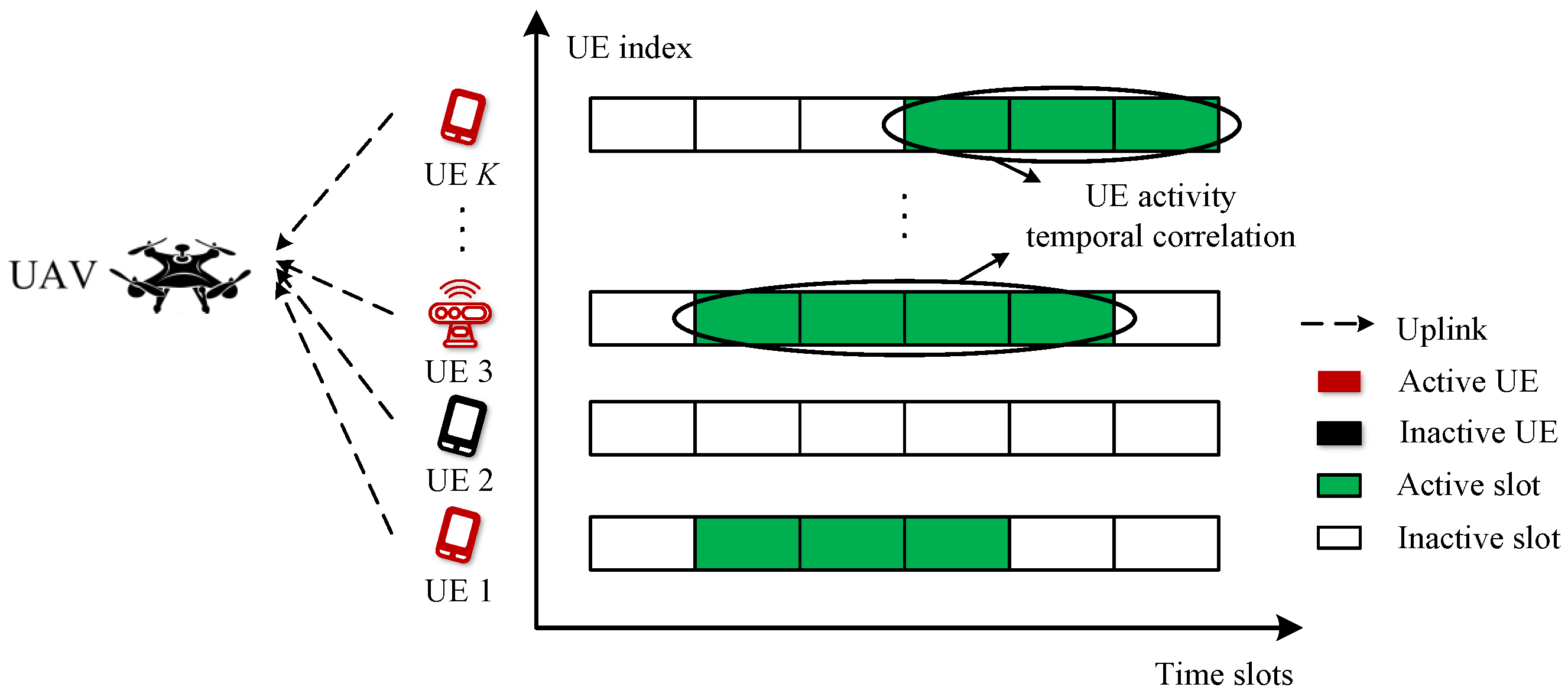
- The BG-MC model is employed to jointly exploit both the sparse structure of the active UE and the slow change feature in consecutive time slots of the AS. Indeed, the performance of the UAV-BS detector can be improved by updating the AS while considering the temporal correlation. Hence, both the forward messages from the previous slot and the backward messages from the next slot are considered in the MP algorithm at each iteration.
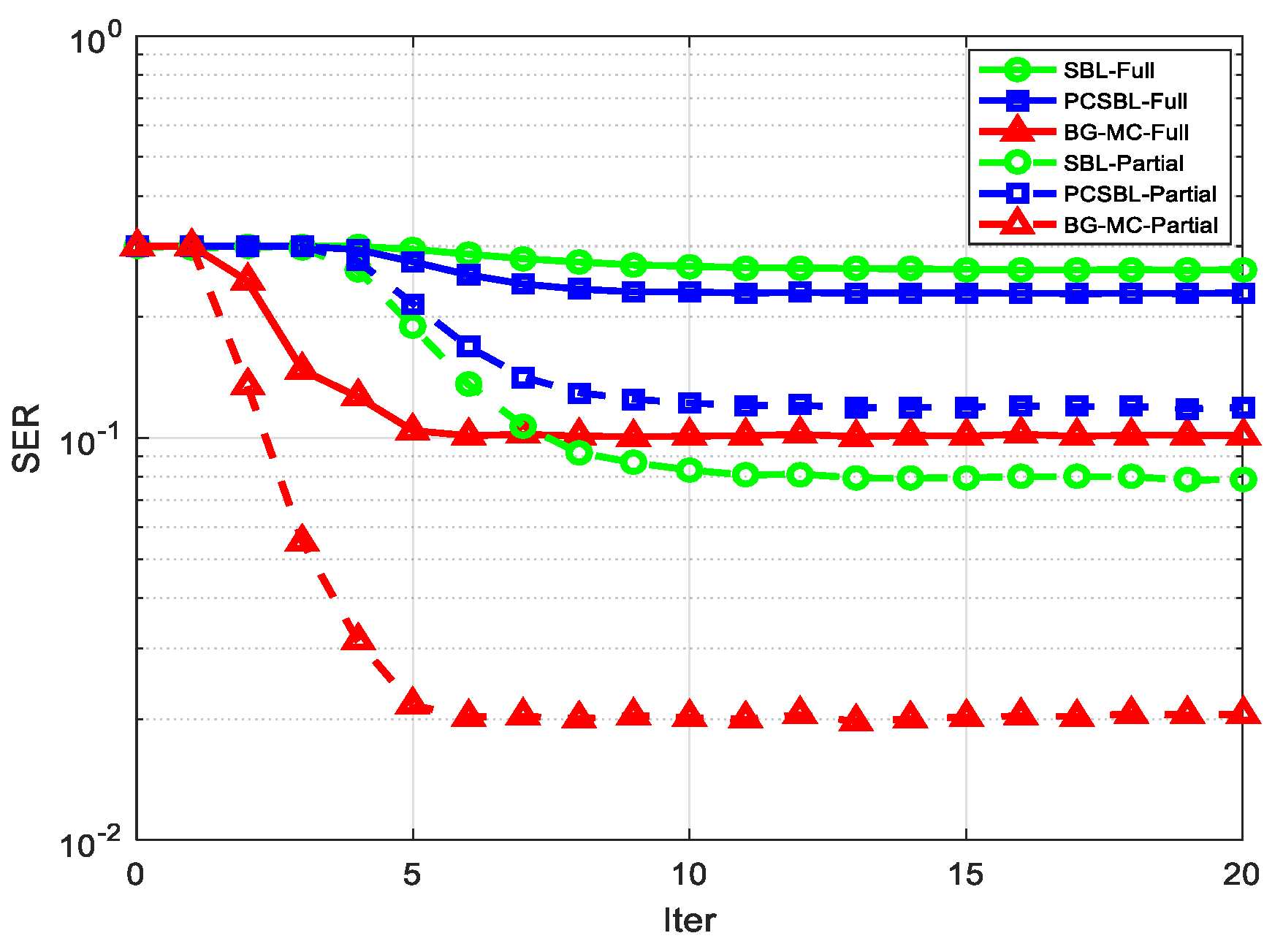
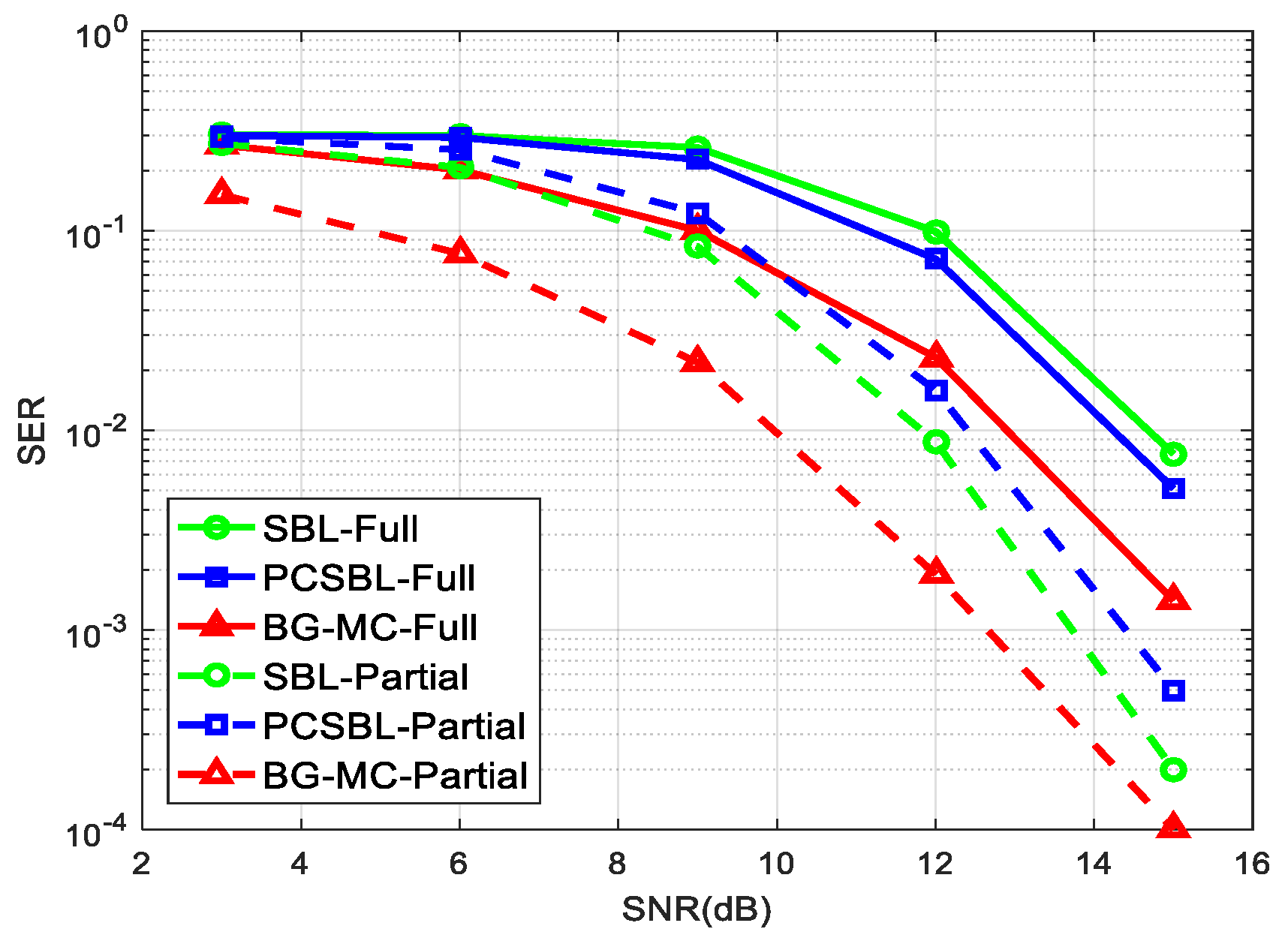
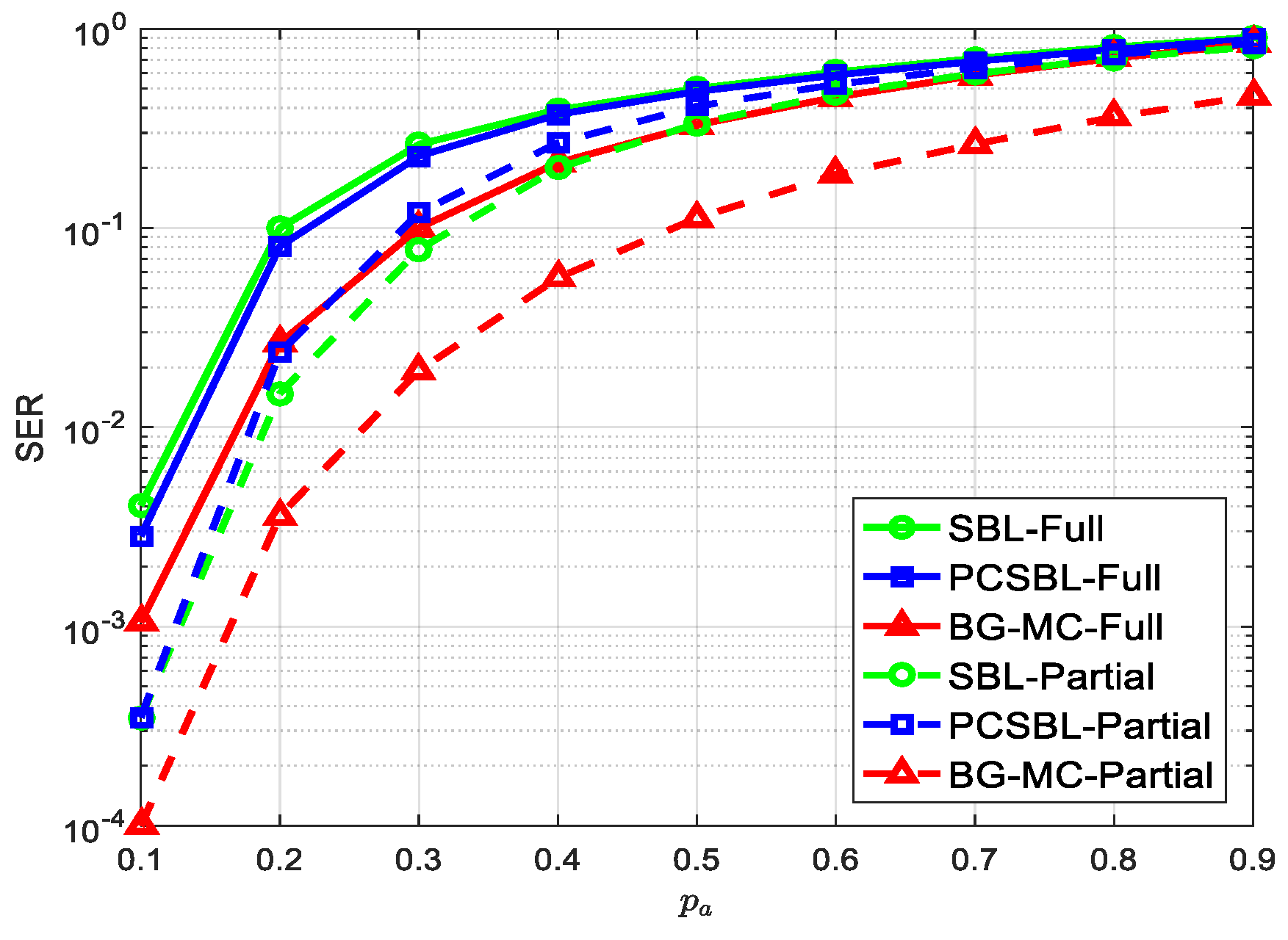
- Making use of the HMP rule, the GAMP-BG-MC algorithm is proposed to detect the UAV-BS received signal of multiple superimposed UEs. The proposed GAMP-BG-MC algorithm not only calculates the more accurate posterior probability density function (PDF) of the transmitted signal but also adaptively learns the parameters of the prior model during the estimation procedure. Simulation results show that the GAMP-BG-MC algorithm has a better signal-to-noise ratio (SNR) performance as compared to the GAMP-SBL [13,14] and the GAMP-PCSBL [14] algorithms, respectively, while keeping the complexity.
2. System Model and Factor Graph
2.1. System Model
2.2. Probabilistic Formulation
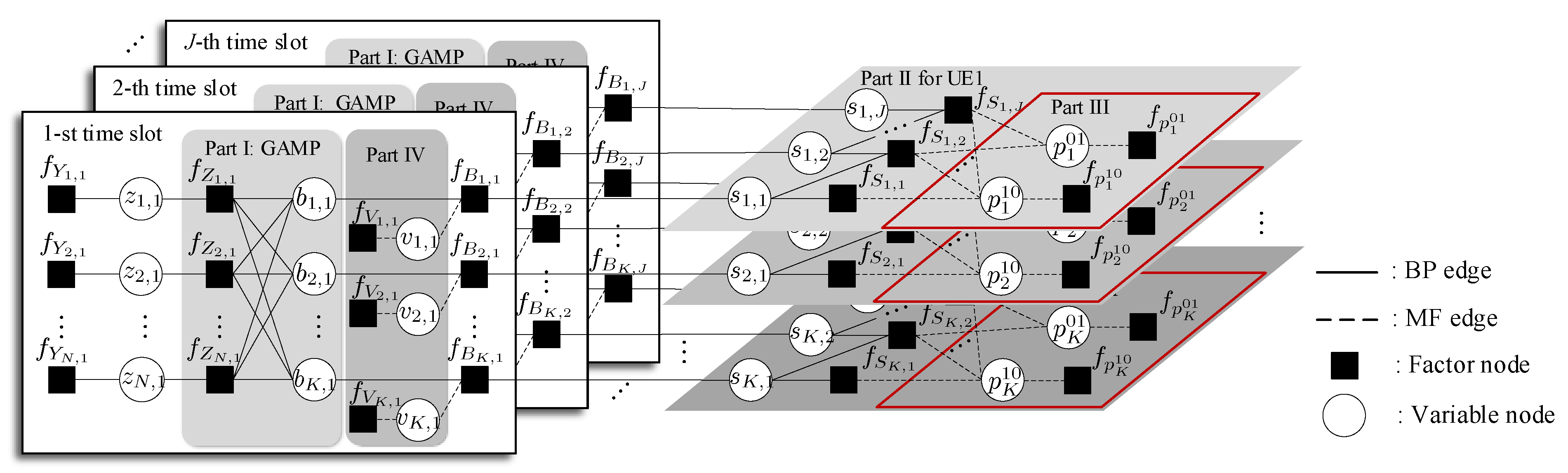
2.3. Factor Graph Representation
3. Adaptive UAV-BS Detector Based on the HMP Rule
3.1. Computation of the HMP for GAMP-BG-MC Algorithm
3.1.1. Part I GAMP Part Messages
| Algorithm 1: GAMP algorithm |
Input: Received signal , channel matrix Output: Initialize: // Update right output messages:
// Update left output messages:
|
3.1.2. Part II MC Part Messages
3.1.3. Part III Transition Probability Update Part
3.1.4. Part IV Variance Update Part
3.2. Message Passing Scheduling
| Algorithm 2: GAMP-BG-MC algorithm |
 |
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bor-Yaliniz, I.; Yanikomeroglu, H. The new Frontier in RAN heterogeneity: Multi-tier drone-cells. IEEE Commun. Mag. 2016, 54, 48–55. [Google Scholar] [CrossRef]
- Dapper e Silva, T.; Emygdio de Melo, C.F.; Cumino, P.; Rosário, D.; Cerqueira, E.; Pignaton de Freitas, E. STFANET: SDN-based topology management for flying Ad hoc network. IEEE Access 2019, 7, 173499–173514. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, H.; Zhao, H. An SDN framework for UAV backbone network towards knowledge centric networking. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 456–461. [Google Scholar]
- Wang, Z.; Duan, L.; Zhang, R. Adaptive deployment for UAV-aided communication networks. IEEE Trans. Wirel. Commun. 2019, 18, 4531–4543. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned Aerial Vehicle with Underlaid Device-to-Device Communications: Performance and Tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
- Seo, J.B.; Pack, S.; Jin, H. Uplink NOMA random access for UAV-assisted communications. IEEE Trans. Veh. Technol. 2019, 68, 8289–8293. [Google Scholar] [CrossRef]
- Dai, L.; Wang, B.; Yuan, Y.; Han, S.; Chih-lin, I.; Wang, Z. Non-orthogonal multiple access for 5G: Solutions, challenges, opportunities, and future research trends. IEEE Commun. Mag. 2015, 53, 74–81. [Google Scholar] [CrossRef]
- Farajzadeh, A.; Ercetin, O.; Yanikomeroglu, H. UAV data collection over NOMA backscatter networks: UAV altitude and trajectory optimization. In Proceedings of the 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–7. [Google Scholar]
- Liu, L.; Larsson, E.G.; Yu, W.; Popovski, P.; Stefanovic, C.; de Carvalho, E. Sparse Signal Processing for Grant-Free Massive Connectivity: A Future Paradigm for Random Access Protocols in the Internet of Things. IEEE Signal Proc. Mag. 2018, 35, 88–99. [Google Scholar] [CrossRef]
- Li, B.; Zheng, J.; Gao, Y. Compressed sensing based multiuser detection of grant-free NOMA with dynamic user activity. IEEE Commun. Lett. 2021, 26, 143–147. [Google Scholar] [CrossRef]
- Gao, Y.; Zheng, J.; Li, B. Multiuser detection of GF-NOMA with dynamic-active users and temporal-correlated channels. IEEE Commun. Lett. 2022, 26, 2380–2384. [Google Scholar] [CrossRef]
- Yuan, W.; Wu, N.; Guo, Q.; Ng, D.W.K.; Yuan, J.; Hanzo, L. Iterative joint channel estimation, user activity tracking, and data detection for FTN-NOMA systems supporting random access. IEEE Trans. Commun. 2020, 68, 2963–2977. [Google Scholar] [CrossRef]
- Zhang, X.; Fan, P.; Liu, J.; Hao, L. Bayesian learning-based multiuser detection for grant-free NOMA systems. IEEE Trans. Wirel. Commun. 2022, 21, 6317–6328. [Google Scholar] [CrossRef]
- Zhang, X.; Fan, P.; Li, H.; Quan, X. Generalized approximate message passing based Bayesian learning detectors for uplink grant-free NOMA. IEEE Trans. Veh. Technol. 2023, 72, 15057–15061. [Google Scholar] [CrossRef]
- Song, Y.; Zhang, C.; Lu, X.; Saggese, F.; Wang, Z. Hybrid message passing algorithm for downlink FDD massive MIMO-OFDM channel estimation. IEEE Trans. Wirel. Commun. 2023, 23, 4596–4609. [Google Scholar] [CrossRef]
- Frison, C.I.; Mora, H.R.C.; de Almeida, C. MC-CDMA and SCMA performance and complexity comparison in overloaded scenarios. In Proceedings of the 2019 IEEE Colombian Conference on Communications and Computing (COLCOM), Barranquilla, Colombia, 5–7 June 2019; pp. 1–6. [Google Scholar]
- Carvajal Mora, H.R.; Garzón, N.V.O.; de Almeida, C. Mean bit error rate evaluation of MC-CDMA cellular systems employing multiuser-maximum-likelihood detector. IEEE Trans. Veh. Technol. 2017, 66, 9838–9851. [Google Scholar] [CrossRef]
- Kuai, X.; Chen, L.; Yuan, X.; Liu, A. Structured turbo compressed sensing for downlink massive MIMO-OFDM channel estimation. IEEE Trans. Wirel. Commun. 2019, 18, 3813–3826. [Google Scholar] [CrossRef]
- Zhu, W.; Tao, M.; Yuan, X.; Guan, Y. Message Passing-Based Joint User Activity Detection and Channel Estimation for Temporally Correlated Massive Access. IEEE Trans. Commun. 2023, 71, 3576–3591. [Google Scholar] [CrossRef]
- Pedersen, N.L.; Manchón, C.N.; Shutin, D.; Fleury, B.H. Application of Bayesian hierarchical prior modeling to sparse channel estimation. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 3487–3492. [Google Scholar]
- Mo, L.; Lu, X.; Yuan, J.; Zhang, C.; Wang, Z.; Popovski, P. Generalized Unitary Approximate Message Passing for Double Linear Transformation Model. IEEE Trans. Signal Process. 2023, 71, 1524–1538. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Assumption | Description |
|---|---|
| Transmission scheme | GF-NOMA scheme is employed for multiple UEs |
| Single antenna | Both UAV-BS and UEs are equipped with a single antenna |
| Independent UE AS | Activity states of different UEs are assumed to be independent |
| Channel prior model | The BG-MC probability model is utilized |
| GF-NOMA technique | MC-CDMA scheme, a hybrid of CDMA and OFDM, is utilized |
| Factor | Distribution | Function |
|---|---|---|
| Equation (6) | ||
| Equation (8) | ||
| Parameter Name | Value | Parameter Name | Value |
|---|---|---|---|
| UE number K | 20 | Spreading factor N | 30 |
| Time slots | 6 | Algorithm iteration T | 20 |
| Modulation scheme | BPSK | Scenarios | Partial and Full |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Zhu, Y.; Chen-Hu, K.; Lu, X.; Sun, P.; Wang, Z. Message Passing Detectors for UAV-Based Uplink Grant-Free NOMA Systems. Drones 2024, 8, 325. https://doi.org/10.3390/drones8070325
Song Y, Zhu Y, Chen-Hu K, Lu X, Sun P, Wang Z. Message Passing Detectors for UAV-Based Uplink Grant-Free NOMA Systems. Drones. 2024; 8(7):325. https://doi.org/10.3390/drones8070325
Chicago/Turabian StyleSong, Yi, Yiwen Zhu, Kun Chen-Hu, Xinhua Lu, Peng Sun, and Zhongyong Wang. 2024. "Message Passing Detectors for UAV-Based Uplink Grant-Free NOMA Systems" Drones 8, no. 7: 325. https://doi.org/10.3390/drones8070325
APA StyleSong, Y., Zhu, Y., Chen-Hu, K., Lu, X., Sun, P., & Wang, Z. (2024). Message Passing Detectors for UAV-Based Uplink Grant-Free NOMA Systems. Drones, 8(7), 325. https://doi.org/10.3390/drones8070325