
Autonomous UAV Safety Oriented Situation Monitoring and Evaluation System

Abstract

1. Introduction
- A UAV on-board data measurement system, which can monitor UAV on-board data, was established.
- A UAV monitoring system based on LabVIEW, which can display UAV data in real-time, was established.
- An autonomous safety evaluation system for UAVs, which can evaluate the safety posture of UAVs according to their current flight status, was established.
- The established LabVIEW-based online monitoring and evaluation system for UAV safety can provide a flight guarantee for autonomous flying UAVs.
2. Overall Design of Online Monitoring System
2.1. Microcontroller Minimal System
2.2. Power Supply Module
2.3. Power Module
2.4. GPS Positioning Module
2.5. Altitude Measurement Module
2.6. Attitude Detection Module
2.7. Wireless Transmission Module
3. System Software Design
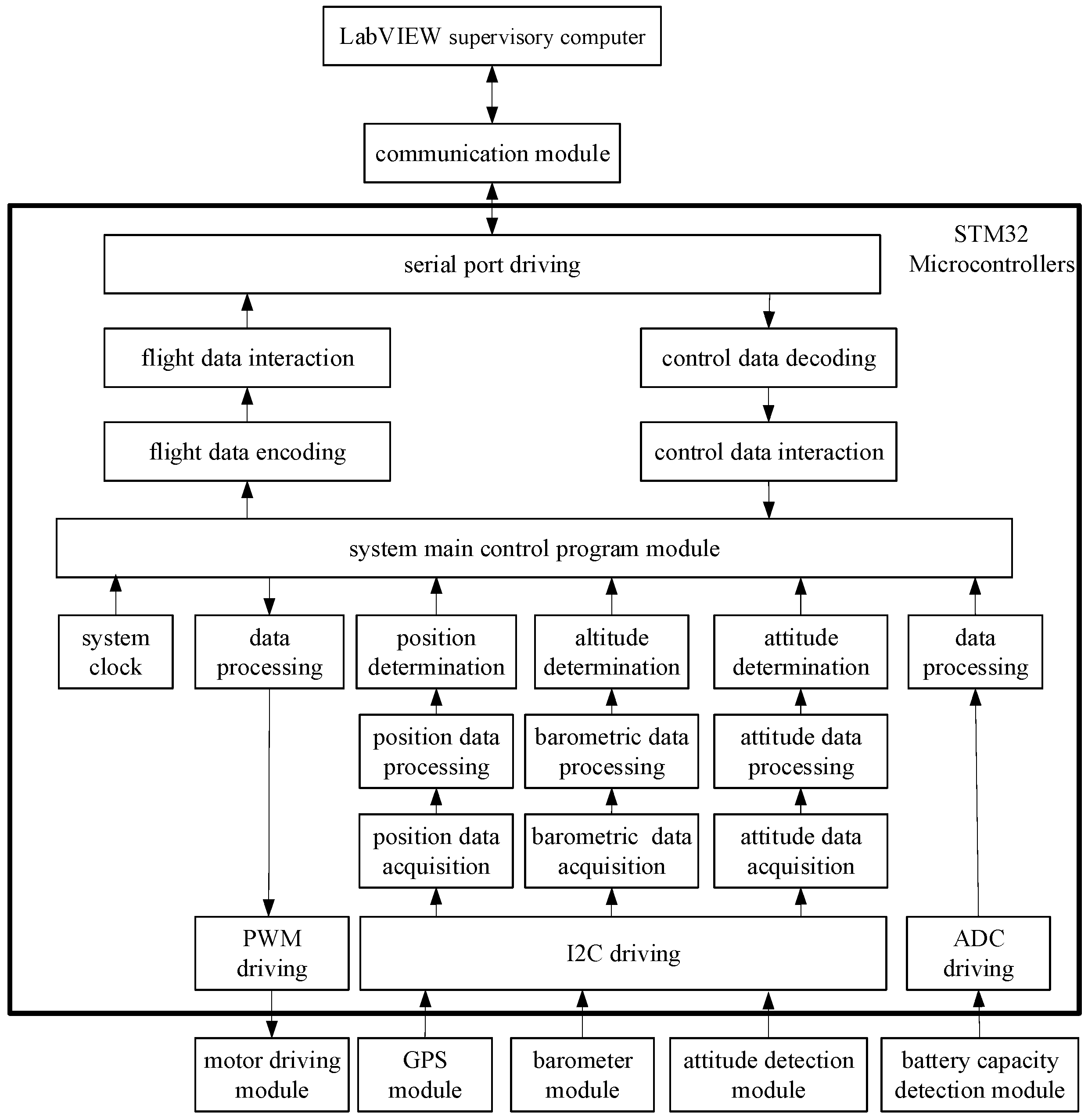
3.1. Functional Block Diagram of the Lower Computer Software
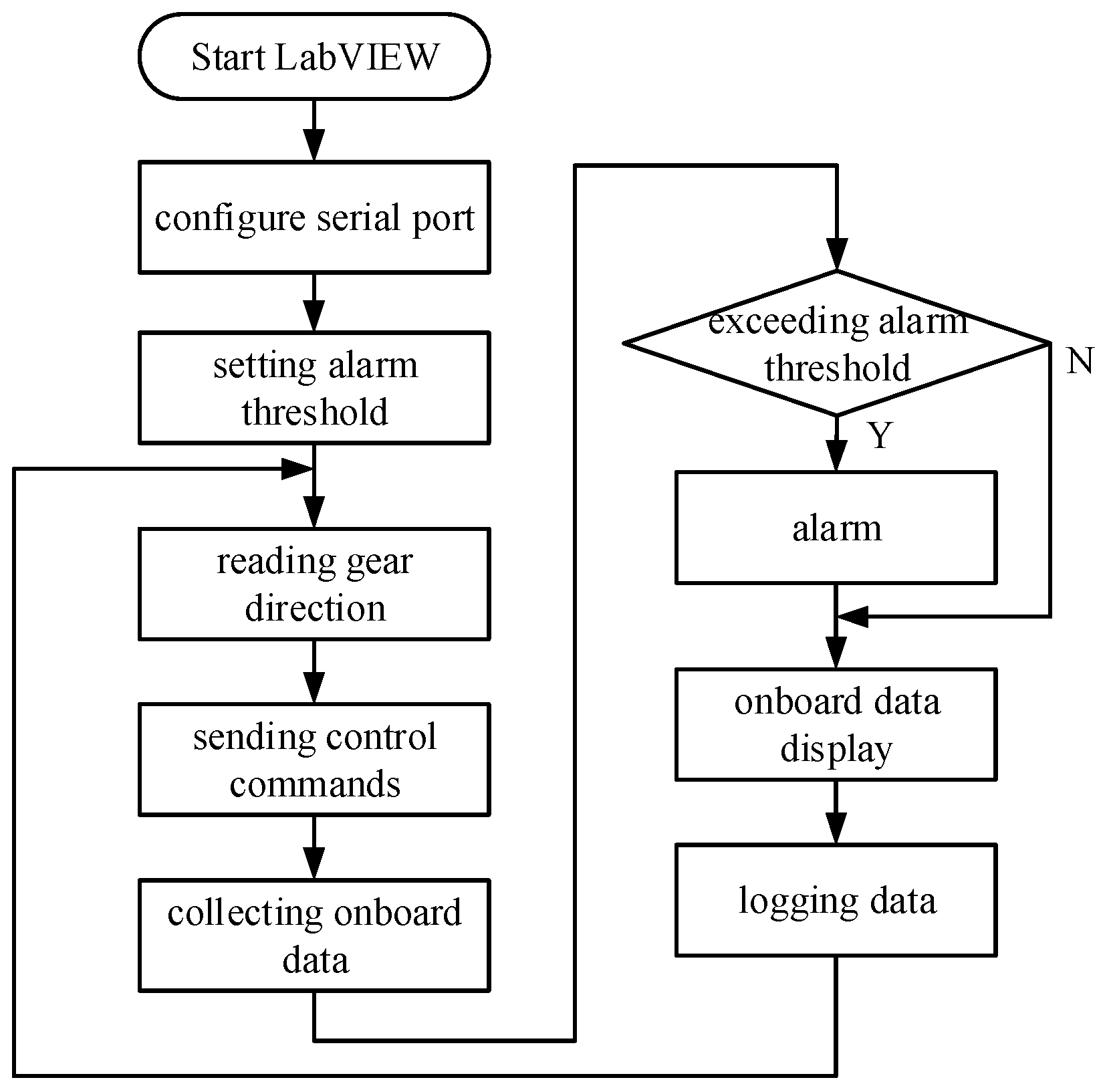
3.2. Flowchart of the Main Programmer of the Front Panel of the Host Computer
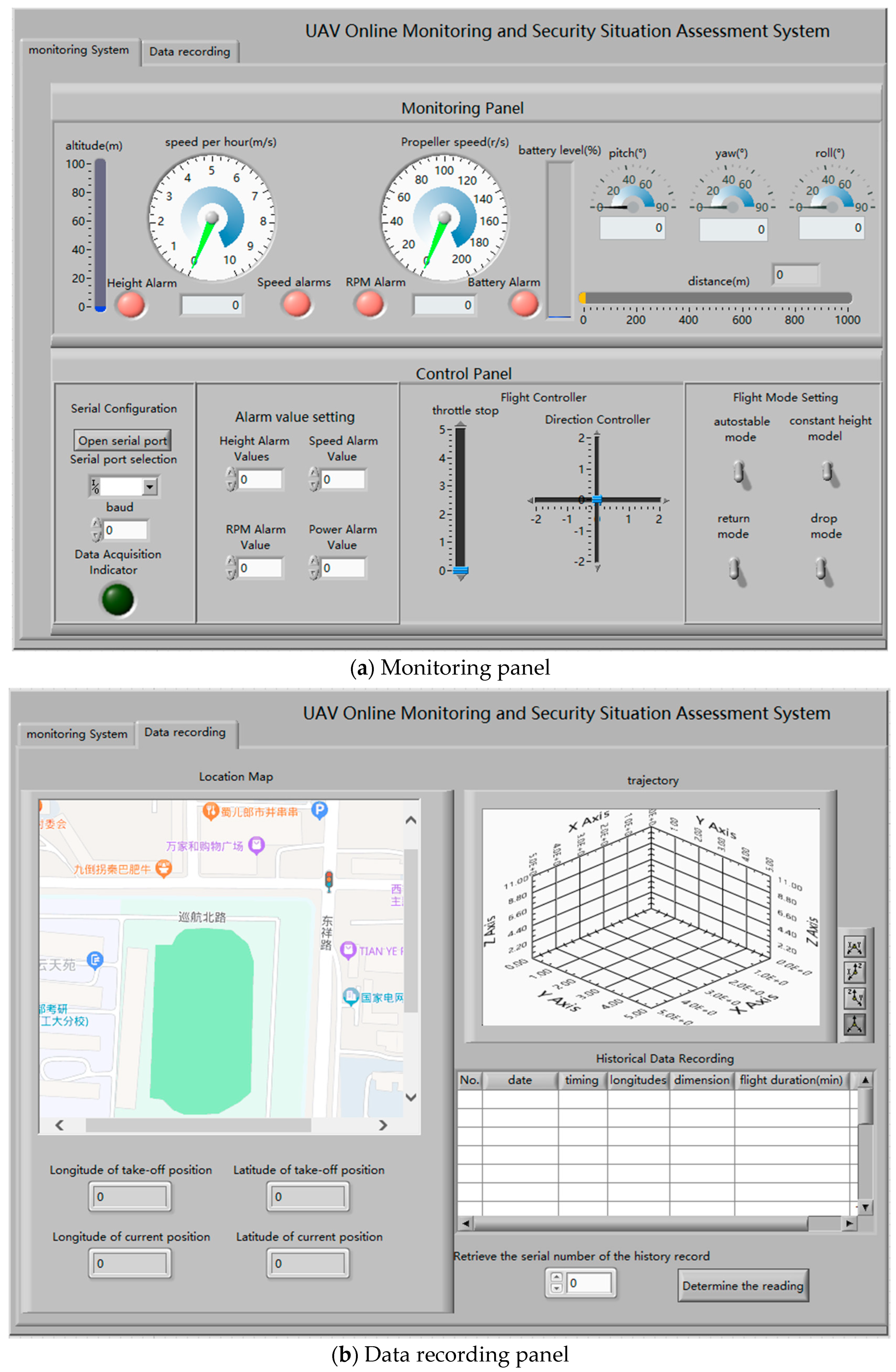
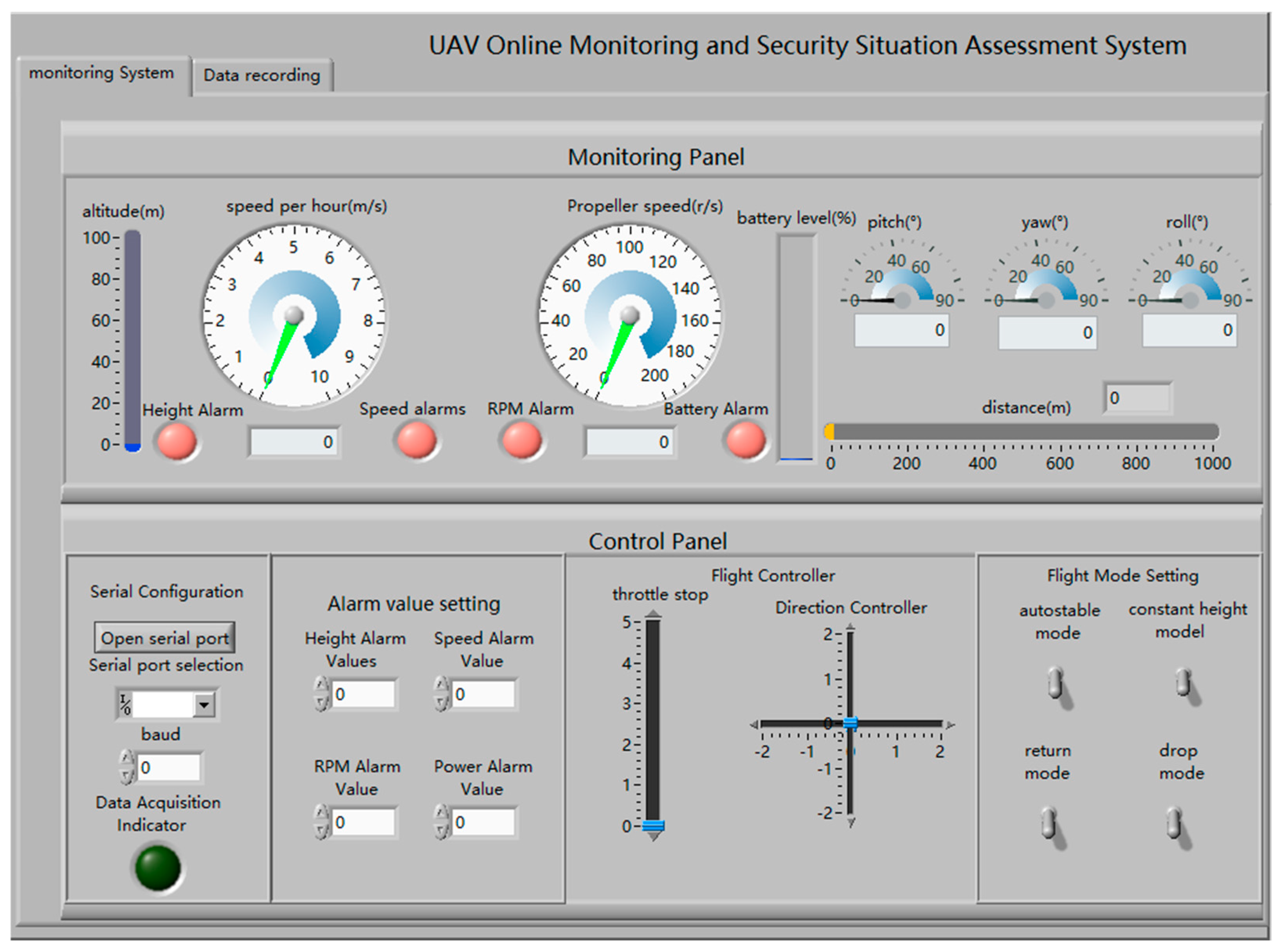
3.3. Monitoring System Front Panel Design
3.3.1. Online Monitoring System Tab
- (1)
- Serial port settings
- (2)
- Flight level indicator
- (3)
- Flight speed display
- (4)
- Propeller speed display
- (5)
- Battery level display
- (6)
- Attitude display
- (7)
- Flight distance display
- (8)
- Control module
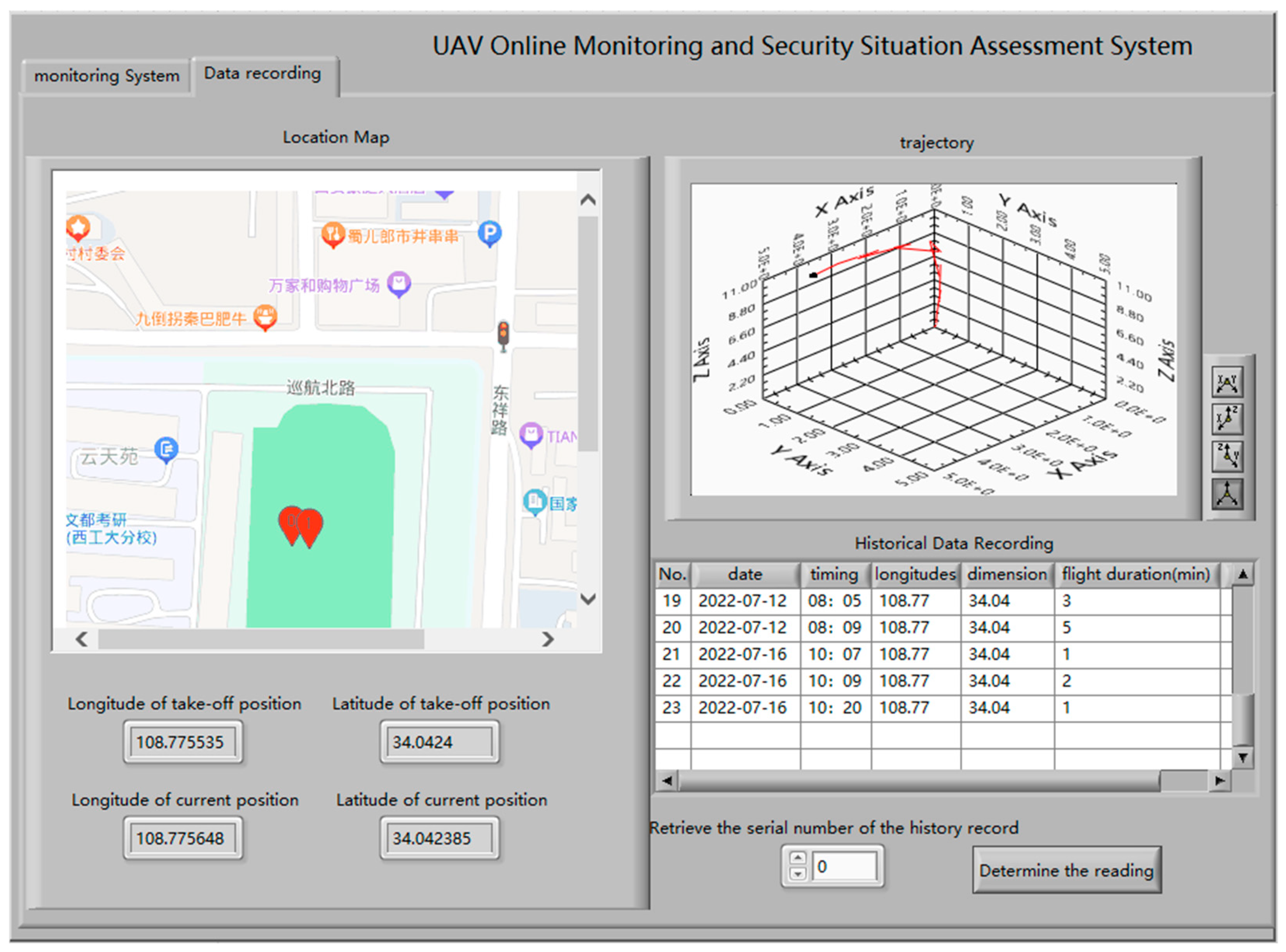
3.3.2. Flight Data Logging Tab
- (1)
- Real-time position module
- (2)
- Flight track module
- (3)
- Historical data recording module
4. Autonomous Security Evaluation System Design
4.1. Aviation Airborne Information Solving
4.2. Aviation Airborne Information Solving

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
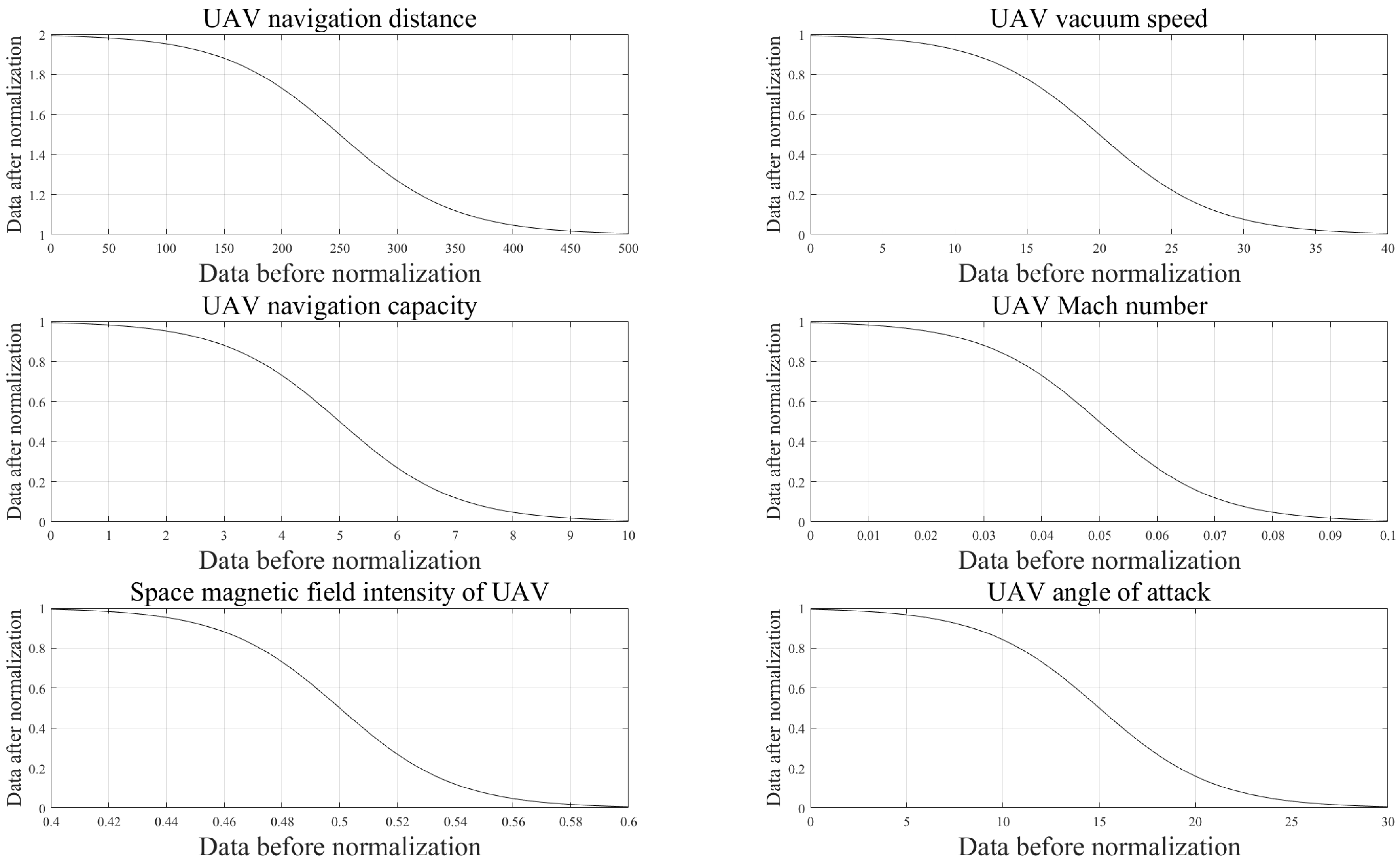
| Indicator Name | Interval | Logistic Function |
|---|---|---|
| Unmanned aerial vehicle navigation distance | [0, 500] | (10) |
| Unmanned aerial vehicle vacuum speed | [0, 40] | (11) |
| Unmanned aerial vehicle navigation capacity | [0, 10] | (12) |
| Mach Number of unmanned aerial vehicles | [0, 0.1] | (13) |
| Space magnetic field strength of the unmanned aerial vehicle | [0.4, 0.6] | (14) |
| UAV attack angle | [0, 30] | (15) |
4.3. Establishment of a Drone Safety Evaluation System
5. Results and Analysis
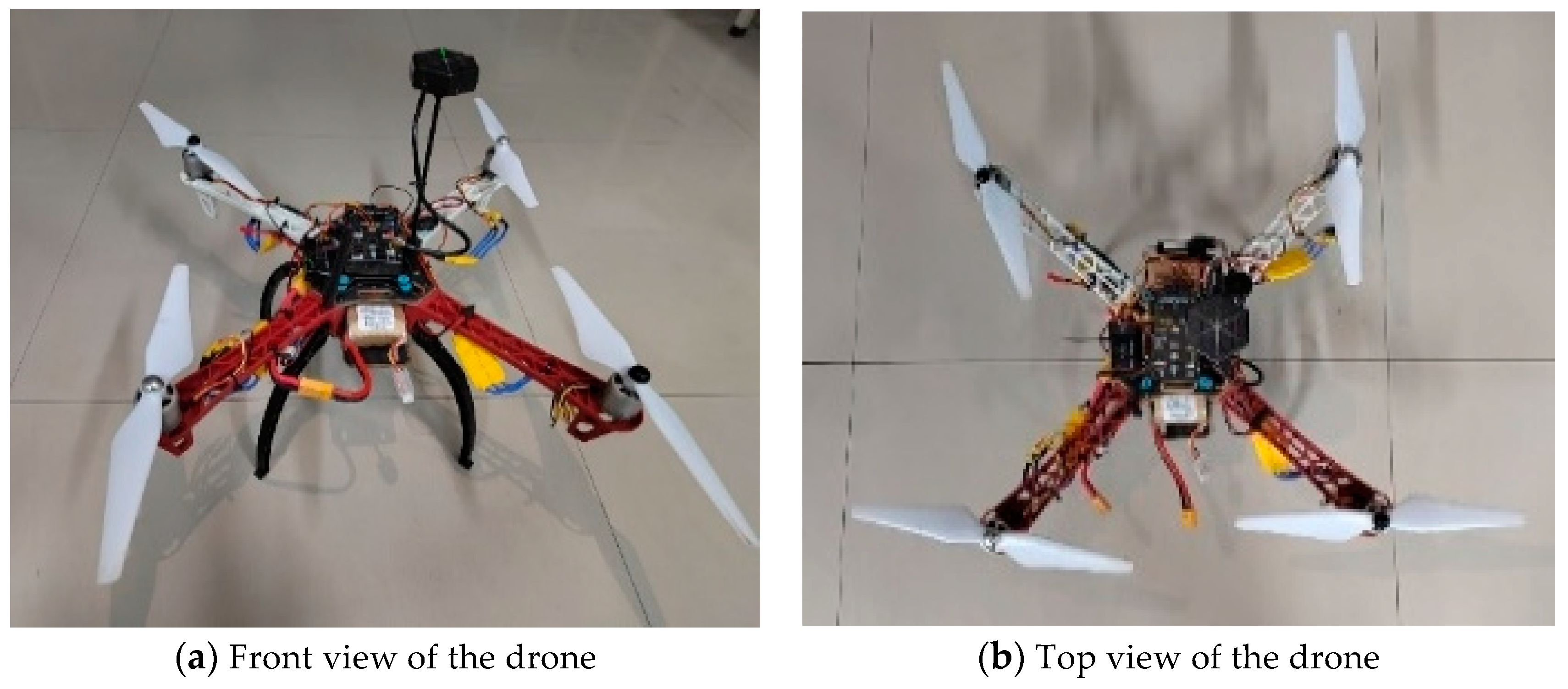
5.1. Lower Computer Testing
5.2. Upper Computer Testing
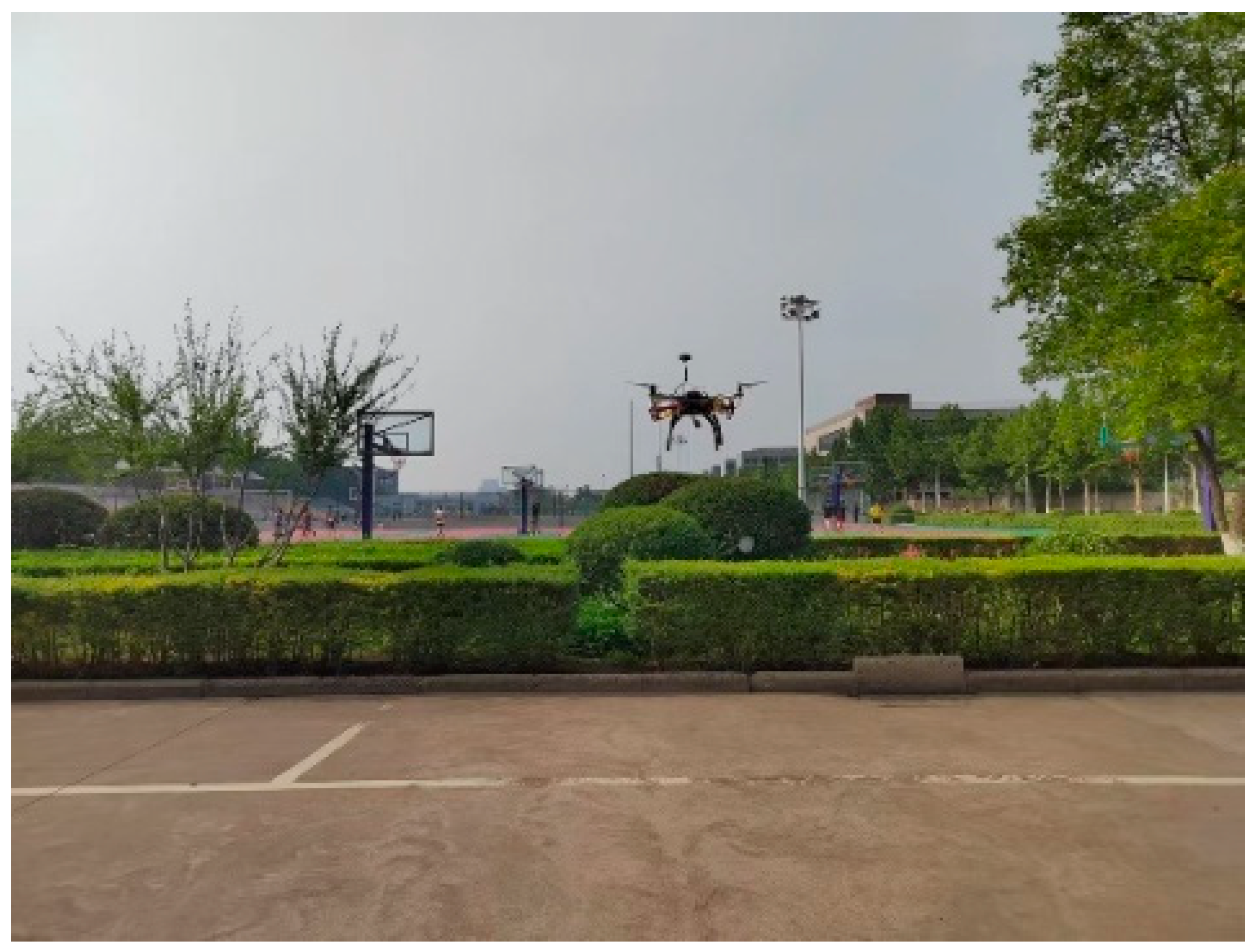
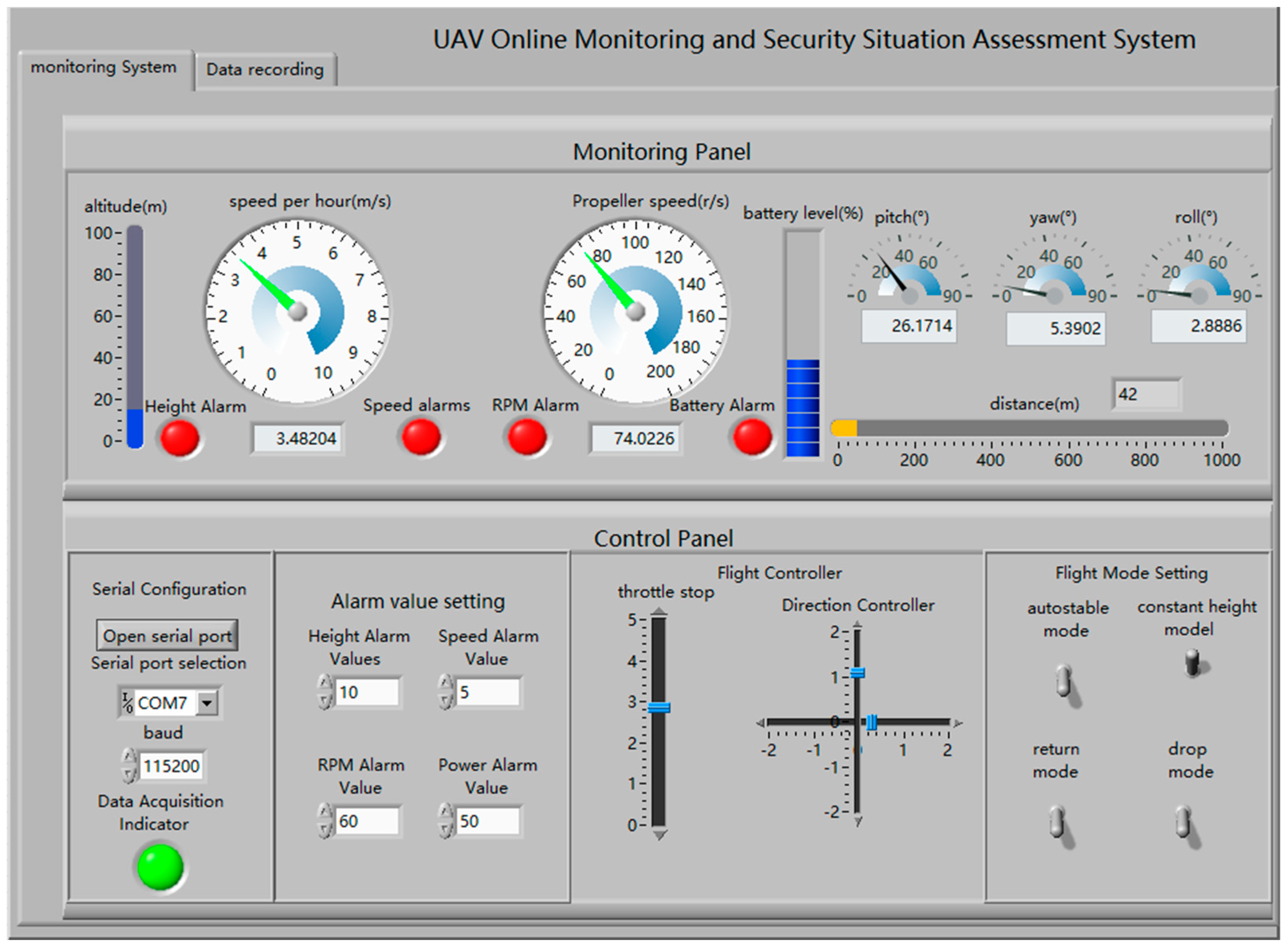
5.2.1. Flight Test
5.2.2. Abnormal Alarm Test
5.2.3. Flight Data Recording Test
5.3. Security Score Test
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yan, X.; Fu, T.; Lin, H.; Xuan, F.; Huang, Y.; Cao, Y.; Hu, H.; Liu, P. UAV Detection and Tracking in Urban Environments Using Passive Sensors: A Survey. Appl. Sci. 2023, 13, 11320. [Google Scholar] [CrossRef]
- Sarkar, N.I.; Gul, S. Artificial Intelligence-Based Autonomous UAV Networks: A Survey. Drones 2023, 7, 322. [Google Scholar] [CrossRef]
- Messaoudi, K.; Oubbati, O.S.; Rachedi, A.; Lakas, A.; Bendouma, T.; Chaib, N. A Survey of UAV-Based Data Collection: Challenges, Solutions and Future Perspectives. J. Netw. Comput. Appl. 2023, 216, 103670. [Google Scholar] [CrossRef]
- Guan, S.; Zhu, Z.; Wang, G. A Review on UAV-Based Remote Sensing Technologies for Construction and Civil Applications. Drones 2022, 6, 117. [Google Scholar] [CrossRef]
- Zhang, J.; Shi, Z.; Zhang, A.; Yang, Q.; Shi, G.; Wu, Y. UAV Trajectory Prediction Based on Flight State Recognition. IEEE Trans. Aerosp. Electron. Syst. 2023, 60, 2629–2641. [Google Scholar] [CrossRef]
- Jiandong, Z.; Qiming, Y.; Guoqing, S.; Yi, L.; Yong, W. UAV Cooperative Air Combat Maneuver Decision Based on Multi-Agent Reinforcement Learning. J. Syst. Eng. Electron. 2021, 32, 1421–1438. [Google Scholar] [CrossRef]
- Liu, C.; Sun, S.; Tao, C.; Shou, Y.; Xu, B. Sliding Mode Control of Multi-Agent System with Application to UAV Air Combat. Comput. Electr. Eng. 2021, 96, 107491. [Google Scholar] [CrossRef]
- Jiang, F.; Xu, M.; Li, Y.; Cui, H.; Wang, R. Short-Range Air Combat Maneuver Decision of UAV Swarm Based on Multi-Agent Transformer Introducing Virtual Objects. Eng. Appl. Artif. Intell. 2023, 123, 106358. [Google Scholar] [CrossRef]
- Li, S.; Wang, Y.; Zhou, Y.; Jia, Y.; Shi, H.; Yang, F.; Zhang, C. Multi-UAV Cooperative Air Combat Decision-Making Based on Multi-Agent Double-Soft Actor-Critic. Aerospace 2023, 10, 574. [Google Scholar] [CrossRef]
- Khelifi, M.; Butun, I. Swarm Unmanned Aerial Vehicles (SUAVs): A Comprehensive Analysis of Localization, Recent Aspects, and Future Trends. J. Sens. 2022, 2022, 8600674. [Google Scholar] [CrossRef]
- Adoni, W.; Lorenz, S.; Fareedh, J.; Gloaguen, R.; Bussmann, M. Investigation of Autonomous Multi-UAV Systems for Target Detection in Distributed Environment: Current Developments and Open Challenges. Drones 2023, 7, 263. [Google Scholar] [CrossRef]
- Amodu, O.A.; Bukar, U.A.; Raja Mahmood, R.A.; Jarray, C.; Othman, M. Age of Information Minimization in UAV-Aided Data Collection for WSN and IoT Applications: A Systematic Review. J. Netw. Comput. Appl. 2023, 216, 103652. [Google Scholar] [CrossRef]
- Kamkuimo, S.; Magalhaes, F.; Zrelli, R.; Misson, H.; Attia, M.; Nicolescu, G. Decomposition and Modeling of the Situational Awareness of Unmanned Aerial Vehicles for Advanced Air Mobility. Drones 2023, 7, 501. [Google Scholar] [CrossRef]
- Sziroczak, D.; Rohacs, D.; Rohacs, J. Review of Using Small UAV Based Meteorological Measurements for Road Weather Management. Prog. Aerosp. Sci. 2022, 134, 100859. [Google Scholar] [CrossRef]
- Nwaogu, J.M.; Yang, Y.; Chan, A.P.C.; Chi, H. Application of Drones in the Architecture, Engineering, and Construction (AEC) Industry. Autom. Constr. 2023, 150, 104827. [Google Scholar] [CrossRef]
- Al-Dosari, K.; Hunaiti, Z.; Balachandran, W. A Review of Civilian Drones Systems, Applications, Benefits, Safety, and Security Challenges. In The Effect of Information Technology on Business and Marketing Intelligence Systems; Alshurideh, M., Al Kurdi, B.H., Masa’deh, R., Alzoubi, H.M., Salloum, S., Eds.; Studies in Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2023; Volume 1056, pp. 793–812. ISBN 978-3-031-12381-8. [Google Scholar]
- Zhang, Y.; Jing, R.; Ji, X.; Hu, N. Application of Wireless Sensor Network Technology Based on Artificial Intelligence in Security Monitoring System. Open Comput. Sci. 2023, 13, 20220280. [Google Scholar] [CrossRef]
- Zheng, Z.; Liu, Y. Design of Cloud Storage-Oriented Sports Physical Fitness Monitoring System. Comput. Intell. Neurosci. 2022, 2022, 1889381. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Deng, M.; Chen, G.; Liu, Y.; Zhang, Q.; Guo, L. Developing a Geological Disaster Monitoring System Based on Electrical Prospecting. Meas. Sci. Technol. 2023, 34, 045902. [Google Scholar] [CrossRef]
- Dai, Y. Endurance Monitoring Method for Rock Climbers Based on Multisensor FDA Model. Math. Probl. Eng. 2022, 2022, 2683399. [Google Scholar] [CrossRef]
- Shi, Z.; Shi, G.; Zhang, J.; Wang, D.; Xu, T.; Ji, L.; Wu, Y. Design of UAV Flight State Recognition System for Multi-Sensor Data Fusion. IEEE Sens. J. 2024, 24, 21386–21394. [Google Scholar] [CrossRef]
- Yin, F. Practice of Air Environment Quality Monitoring Data Visualization Technology Based on Adaptive Wireless Sensor Networks. Wirel. Commun. Mob. Comput. 2022, 2022, 4160186. [Google Scholar] [CrossRef]
- Lu, L. Remote Monitoring System of Digital Agricultural Greenhouse Based on Internet of Things. Scalable Comput. Pr. Exp. 2023, 24, 439–447. [Google Scholar] [CrossRef]
- Bo, L.; Liu, Y.; Zhang, Z.; Zhu, D.; Wang, Y. Research on an Online Monitoring System for Efficient and Accurate Monitoring of Mine Water. IEEE Access 2022, 10, 18743–18756. [Google Scholar] [CrossRef]
- Shi, Z.; Jia, Y.; Shi, G.; Zhang, K.; Ji, L.; Wang, D.; Wu, Y. Design of Motor Skill Recognition and Hierarchical Evaluation System for Table Tennis Players. IEEE Sens. J. 2024, 24, 5303–5315. [Google Scholar] [CrossRef]
- Lim, Y.Z.; Xin, X.; Khoo, T.P. Enhancing UAV Flight Safety through Sensor-Based Runtime Risk Assessment. In Proceedings of the 2022 IEEE 8th World Forum on Internet of Things (WF-IoT), Yokohama, Japan, 26 October–11 November 2022; IEEE: Yokohama, Japan, 2022; pp. 1–5. [Google Scholar]
- Shi, Z.; Zhang, J.; Shi, G.; Ji, L.; Wang, D.; Wu, Y. Design of a UAV Trajectory Prediction System Based on Multi-Flight Modes. Drones 2024, 8, 255. [Google Scholar] [CrossRef]



| No. | x Coordinates/m | y Coordinates/m | z Coordinates/m |
|---|---|---|---|
| 1 | 0.098992790 | 0.284197523 | 6.447164730 |
| 2 | 0.097629208 | 0.288561553 | 6.595019636 |
| 3 | 0.096267288 | 0.292932031 | 6.743196043 |
| 4 | 0.095265060 | 0.297148898 | 6.891325279 |
| 5 | 0.094980558 | 0.301052094 | 7.039038672 |
| 6 | 0.095771813 | 0.304481562 | 7.185967548 |
| 7 | 0.097996858 | 0.307277241 | 7.331743236 |
| 8 | 0.102013725 | 0.309279074 | 7.475997062 |
| 9 | 0.108180446 | 0.310327001 | 7.618360353 |
| 10 | 0.116855054 | 0.310260963 | 7.758464437 |
| 11 | 0.128378178 | 0.308942954 | 7.895906277 |
| 12 | 0.142910793 | 0.306462632 | 8.029928085 |
| 13 | 0.098992790 | 0.284197523 | 6.447164730 |
| 14 | 0.097629208 | 0.288561553 | 6.595019636 |
| Name of Factor | Normalized Factor Strengths | Normalized Factor Strengths | Normalized Factor Strengths |
|---|---|---|---|
| Navigation distance | 0.731 | 0.119 | 0.881 |
| Vacuum speed | 0.524 | 0.269 | 0.354 |
| Navigation capacity | 0.690 | 0.310 | 0.646 |
| Mach number | 0.579 | 0.269 | 0.413 |
| Magnetic field intensity | 0.269 | 0.622 | 0.378 |
| Angle of attack | 0.5728 | 0.370 | 0.256 |
| Weighted scores | 0.412 | 0.676 | 0.594 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Z.; Zhang, J.; Shi, G.; Zhu, M.; Ji, L.; Wu, Y. Autonomous UAV Safety Oriented Situation Monitoring and Evaluation System. Drones 2024, 8, 308. https://doi.org/10.3390/drones8070308
Shi Z, Zhang J, Shi G, Zhu M, Ji L, Wu Y. Autonomous UAV Safety Oriented Situation Monitoring and Evaluation System. Drones. 2024; 8(7):308. https://doi.org/10.3390/drones8070308
Chicago/Turabian StyleShi, Zhuoyong, Jiandong Zhang, Guoqing Shi, Mengjie Zhu, Longmeng Ji, and Yong Wu. 2024. "Autonomous UAV Safety Oriented Situation Monitoring and Evaluation System" Drones 8, no. 7: 308. https://doi.org/10.3390/drones8070308
APA StyleShi, Z., Zhang, J., Shi, G., Zhu, M., Ji, L., & Wu, Y. (2024). Autonomous UAV Safety Oriented Situation Monitoring and Evaluation System. Drones, 8(7), 308. https://doi.org/10.3390/drones8070308