1. Introduction
The advancement of UAV (unmanned aerial vehicle) technology has facilitated its widespread utilization across various civil and military domains, including activities such as farmland seeding, forest search and rescue, border monitoring, battlefield surveillance, and electronic countermeasures, among others. However, the intricate nature of tasks and environments poses challenges for single-UAV operations, necessitating the exploration of multi-UAV collaboration. This paradigm has garnered increasing attention due to its notable attributes, including heightened efficiency, robustness, multifunctionality, and scalability. Given the extensive application prospects and significant operational advantages associated with multi-UAVs, research on multi-UAV formation control technology has emerged as a focal point of investigation.
Significant advancements have been made in the research of multi-UAV formation control technology. Control structures in this domain are typically classified into three categories: centralized, decentralized, and distributed. Among these, the consensus algorithm within the distributed control structure is particularly notable for its low communication load, minimal computational requirements, and strong robustness, making it a subject of extensive scholarly discussion [
1].
In the field of consensus formation control for multi-UAVs, several key contributions have emerged. He et al. [
2] proposed a consensus control algorithm designed for high-speed UAV swarms, which utilizes navigation feedback from other UAVs to maintain formation control. Xue and Wu [
3] developed a fuzzy-based sliding-mode control integrated with the consensus method for heterogeneous multiagent systems, which include both UAVs and unmanned vehicles, ensuring formation convergence. Zhen et al. [
4] introduced a consensus control scheme based on multivariate model adaptive control to address the challenges of formation flight under conditions of uncertain parameters and external disturbances. Fu et al. [
5] combined a virtual center and consensus control algorithm to achieve formation control of quadrotor UAVs and integrated the consensus-based auction algorithm (CBAA) for formation reconfiguration. Tao et al. [
6] designed an improved consistency control algorithm to address issues of asymmetric communication interference and network congestion, enabling the formation control of multi-UAVs by constraining their motion states. In terms of the convergence performance of UAVs, Yue et al. [
7] introduced finite-time stability theory to enable the system to reach the desired formation in finite time and obtain a settling time related to the initial state. Gu et al. [
8] studied a UAV swarm formation reconfiguration method based on consistency theory and sliding mode control. Simulation experiments revealed that the proposed method can improve the convergence performance of UAV swarm reconfiguration.
Building on multi-UAV formation control technology and combining it with other algorithms can achieve effective UAV obstacle avoidance and collision avoidance control. Scholars have categorized multi-UAV obstacle and collision avoidance technologies into two main groups: optimization algorithms, such as particle swarm optimization, ant colony optimization, and A* algorithms [
9,
10,
11], and local obstacle avoidance algorithms, including artificial potential field (APF), dynamic-window approach (DWA), and model predictive control (MPC) [
12,
13,
14,
15]. The APF method is particularly notable for its simple implementation, fast response, and good adaptability. Consequently, some researchers have combined the APF method with consensus control algorithms to address UAV obstacle and collision avoidance challenges.
Fang et al. [
16] proposed a segmented APF trajectory planning method combined with consensus control to address the trajectory planning problem for UAVs in different states. This method segments the potential field to meet set motion constraints and adjusts the trajectory point velocity using APF, resulting in a smoother trajectory at local oscillation points. Simulation results indicate that this algorithm produces smoother trajectories than traditional methods while meeting motion constraints and preventing UAV collisions. Huang et al. [
17] improved the traditional APF method by developing a smoothed potential field approach for trajectory planning under various UAV states. This improved smoothed APF method, combined with the second-order consensus method, demonstrated its effectiveness through the formation and collision avoidance simulations involving both static and dynamic obstacles. Wang et al. [
18] tackled obstacle avoidance and position–velocity consensus issues for UAV swarms in a 3D obstacle environment. They enhanced the APF method by incorporating coordination gain and planning angle influences, proposing a method that combines the improved APF with the second-order consensus method. Simulation experiments showed that this method quickly restored the desired formation following obstacle and collision avoidance maneuvers. Wu et al. [
19] advanced the consensus method by increasing UAV maneuverability constraints and, using the improved consensus method and particle swarm optimization (PSO) algorithm, proposed predictive control models for UAV motion under various initial conditions, thereby achieving efficient obstacle avoidance for both static and dynamic obstacles. Wu et al. [
20] also proposed a hybrid genetic simulated annealing approach combined with a consensus protocol control algorithm. This approach rapidly determines UAV formation positions during reconfiguration, reduces reconfiguration time, and prevents collisions. Zhang et al. [
21] developed a control method integrating the consensus approach and improved APF to achieve collision avoidance for UAV swarms during high-speed flight. Liu et al. [
22] introduced a distributed optimal control method based on reinforcement learning for heterogeneous UAV formations. This method allows for the online acquisition of optimal control inputs without requiring detailed knowledge of follower UAV dynamics, ensuring stable control of the UAV swarm. Yang et al. [
23] proposed an optimization algorithm based on single- and double-integral models for the optimal control of cluster motion within a finite period. This algorithm achieves cluster convergence within a finite time and minimizes the intelligent system’s performance index. Experimental simulations confirm that the algorithm maintains the minimum energy function under certain conditions, achieving the optimal cluster formation time. Yang et al. [
24] introduced a linear quadratic regulator optimization method based on consensus control for optimal control problems in heterogeneous unmanned systems. Bai et al. [
25] designed a higher-order consensus control algorithm for quadrotor UAVs with a fixed control topology. To achieve the global optimal solution for attitude control, they proposed an attitude control algorithm based on variable-weight hybridization, with experiments demonstrating the algorithm’s ability to dynamically adjust inertia weights and coefficients to control the influence degree. Zhu et al. [
26] proposed a connectivity-maintained UAV formation control algorithm and a speed-based artificial potential field algorithm to facilitate the formation and obstacle avoidance control of multiple UAVs in complex environments. These advancements collectively enhance the capabilities of multi-UAVs, enabling them to navigate and operate efficiently in diverse and challenging scenarios.
The formation control and obstacle avoidance of multi-UAVs have been extensively studied, as evidenced by the aforementioned references. However, there is a noticeable gap in the literature concerning the convergence performance of multi-UAV formation. This paper addresses this gap by first optimizing the control inputs of UAVs using an optimal algorithm. Additionally, the speed of the UAVs is further optimized using the PSO algorithm to minimize the time required for multi-UAV formation. Finally, to address the obstacle avoidance challenges in multi-UAV systems, this study implements an improved APF method to achieve collaborative obstacle avoidance control in UAV formations.
2. UAV Kinematics Model and Consensus Control Theory
To streamline the UAV kinematics model, this paper focuses on the motion state of UAVs within a two-dimensional plane. The maneuvering parameters are constrained based on the practical application environment. Subsequently, a formation control algorithm is developed leveraging consensus theory principles.
The commonly used kinematics model of UAVs can be described as follows [
20]:
where
is the position of UAV
;
is the heading angle of UAV
;
and
are the velocity components in vertical and horizontal directions of UAV
;
and
are the acceleration components in vertical and horizontal directions of UAV
; and
is the horizontal angular velocity of the UAV
.
To simplify the study of multi-UAV formation control, the kinematics model of UAVs in a two-dimensional plane can be simply described as follows:
where
are the velocity components in
and
directions of UAV
, and
and
are the acceleration components in
and
directions of UAV
. According to the actual flight situation of the UAV, the same constraints are proposed for the velocity and acceleration of each UAV in the multi-UAV formation.
In Equation (3), the range of variation for velocity and acceleration components is provided.
The distributed consensus algorithm stands out as a commonly employed method in multi-UAV formation control. The simplified kinematics model of UAVs can be described by the following differential equation:
where
is the system state quantity, and
is the control input quantity. The second-order consensus algorithm can be expressed as follows:
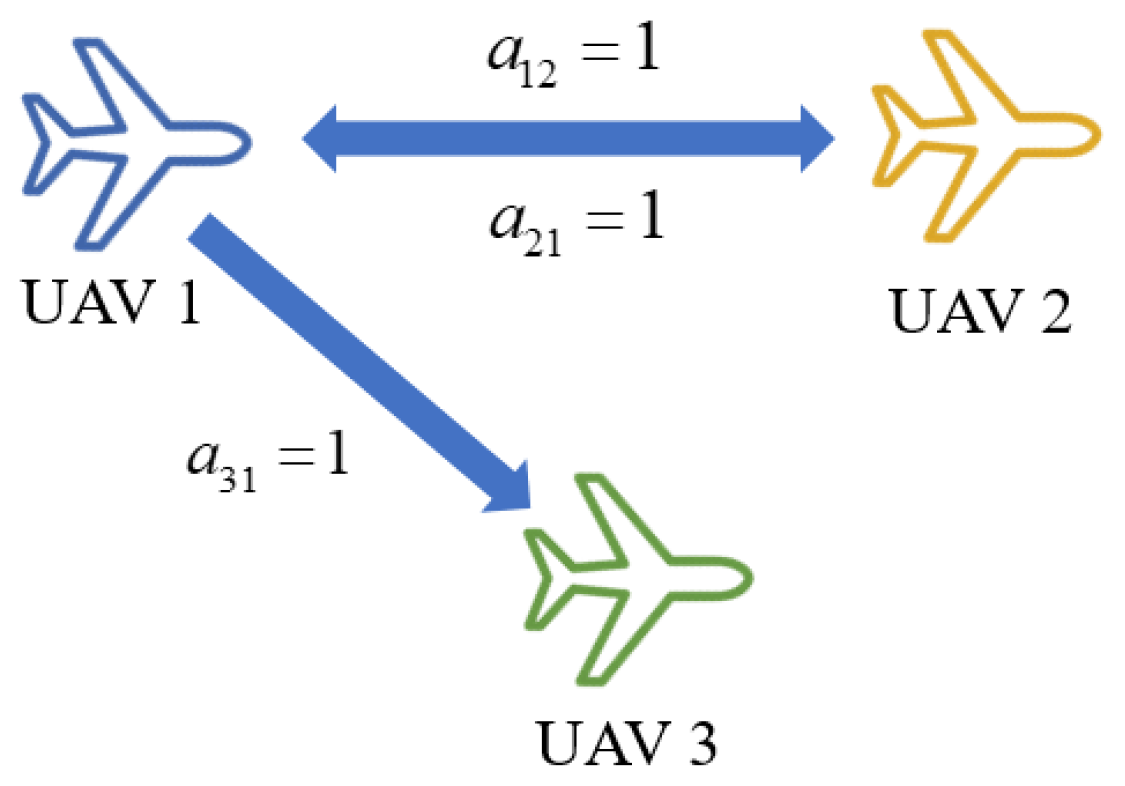
Equation (5) represents a second-order consensus control algorithm that regulates the velocity and position of the UAV to achieve state consensus, where
denotes the positive gain coefficient of the first-order state variable, and
represents the element of the adjacency matrix indicating the communication connection between UAV
and
. When there is communication between the UAVs,
; otherwise,
. It is assumed that
, which implies that UAV
in the formation can obtain information about UAV
. In
Figure 1, UAV 1 and UAV 2 can communicate with each other; UAV 2 and UAV 3 are unable to communicate at all; and UAV 3 can only receive information from UAV 1 but cannot transmit its information to UAV 1.
Meanwhile, to enable the multi-UAV system to form the desired formation, the relative distance between the UAVs is utilized to construct the relative position matrix, as illustrated in Equation (6).
where
is the distance between the UAV
and
. When the UAVs form a formation, the following conditions need to be met:
Equation (7) shows that when the UAV swarm tends to be stable, the relative position between the UAVs needs to tend to the relative distance of (6), and the velocity between the UAVs needs to tend to be consistent. In other words,
and
. The second-order consensus algorithm of Equation (5) can be expressed as follows:
The consensus algorithm of Equation (8) enables the multi-UAV system to achieve the expected formation; however, it does not specify the flight velocity of the UAVs. To meet the actual flight requirements, based on Equation (8) and combined with the autopilot command model, the UAVs can fly at the specified velocity while maintaining the expected formation. Based on the difference between the current velocity
of the UAV
i and the desired velocity
, the acceleration required for the UAV to reach the desired velocity can be obtained. This is represented by the velocity state feedback term
, where
is the gain coefficient of the feedback term. Incorporating this into Equation (8), the improved consensus algorithm can be expressed as follows:
Equation (9) is a second-order consensus formation control algorithm that integrates formation information and feedback of a desired motion state. The feedback term adds control to the algorithm in Equation (8) to achieve the desired motion state, while the formation information ensures that the multi-UAVs form the desired formation according to a specified matrix of relative positions, where are the feedback data of the current UAV motion, are the expected velocity in and directions, are the control coefficients in and directions, and , are the distance conversion parameters in and directions.
5. Conclusions
In this paper, we present a novel obstacle avoidance control method for multi-UAV formation by integrating the APF method with consensus control. This approach allows multi-UAVs to achieve specified flight velocities and desired formation while enhancing the formation’s convergence velocity through optimal control and the PSO algorithm. To address the issue of local optimal commonly associated with traditional APF methods, we increased the deflection angle of the collinear force. Additionally, an optimization term was incorporated to adjust the distance between UAVs and obstacles, effectively resolving the issue of UAV target unreachability. By leveraging the principles of APF, we also enhanced the collision avoidance capabilities among UAVs. Simulation results confirm the effectiveness of the proposed method, demonstrating its practical utility in dynamic and complex environments.
The principal contributions of this study are summarized as follows:
- (1)
The designed optimal consensus algorithm, enhanced by PSO, enables multi-UAV formation to achieve the desired flight state, significantly improving the performance of formation convergence in comparison to the basic algorithm.
- (2)
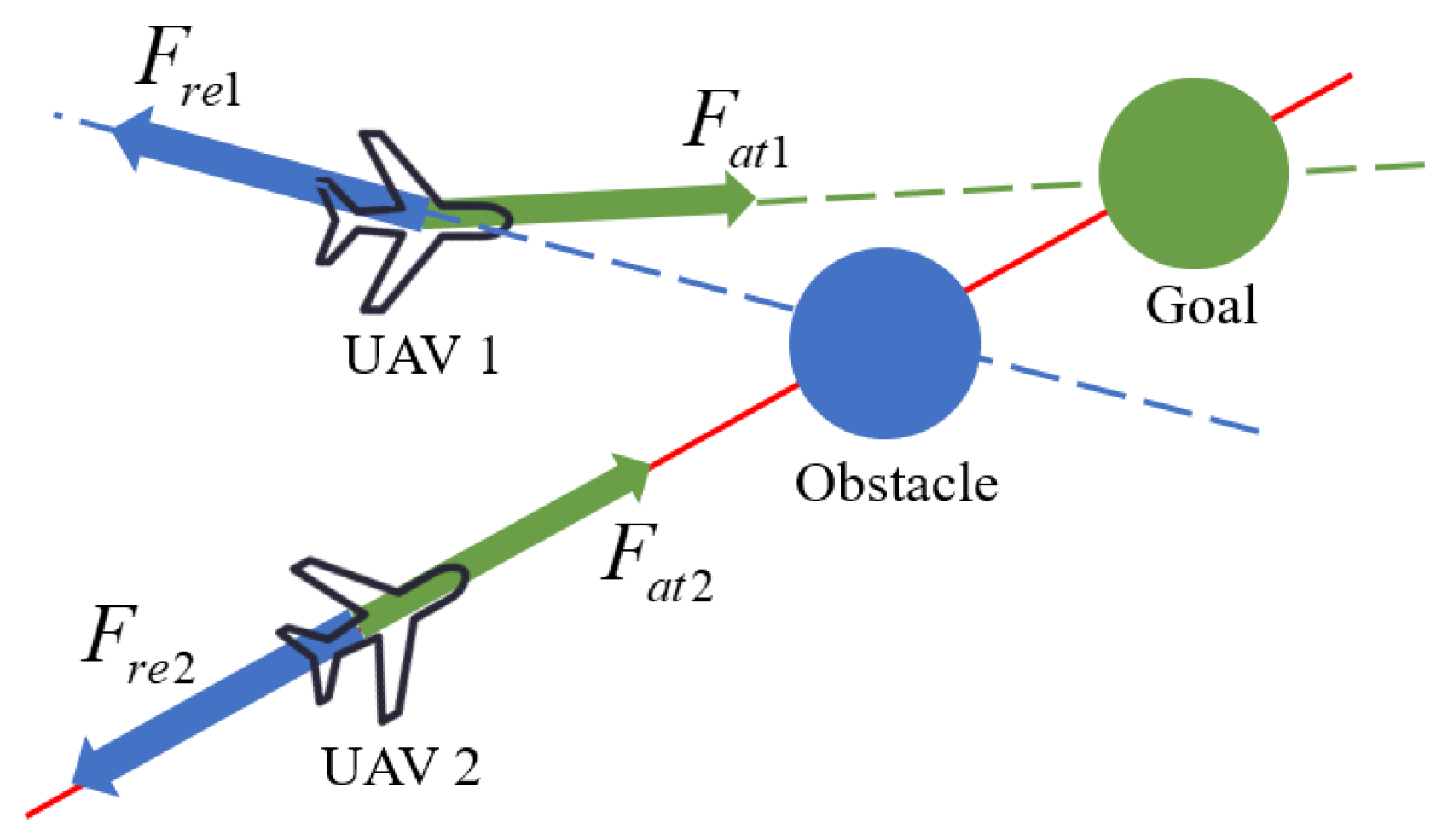
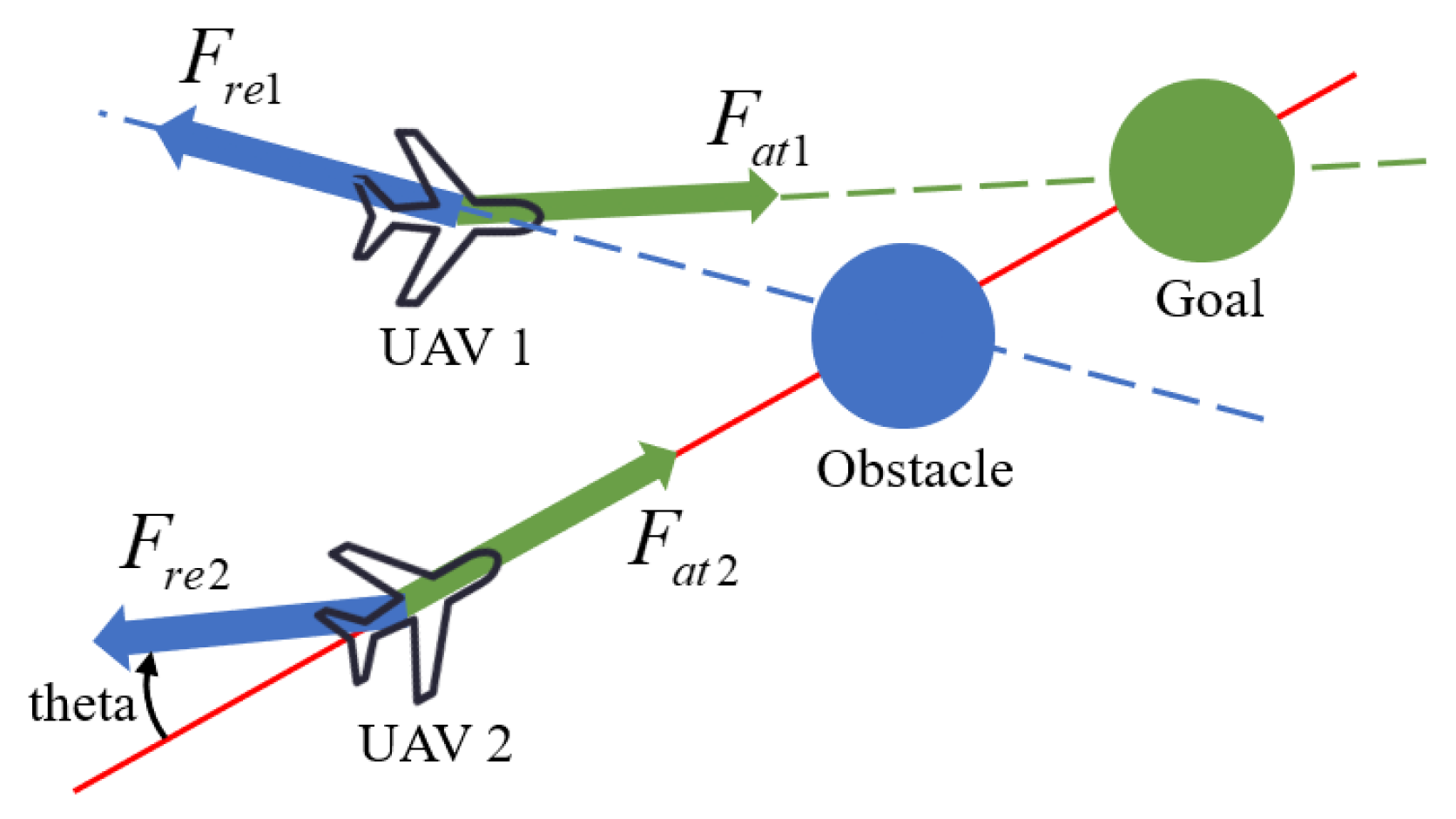
The implementation of the improved APF method, which introduces a small angular offset, resolves the issue of local optimum that typically hampers obstacle avoidance capabilities in UAVs.
- (3)
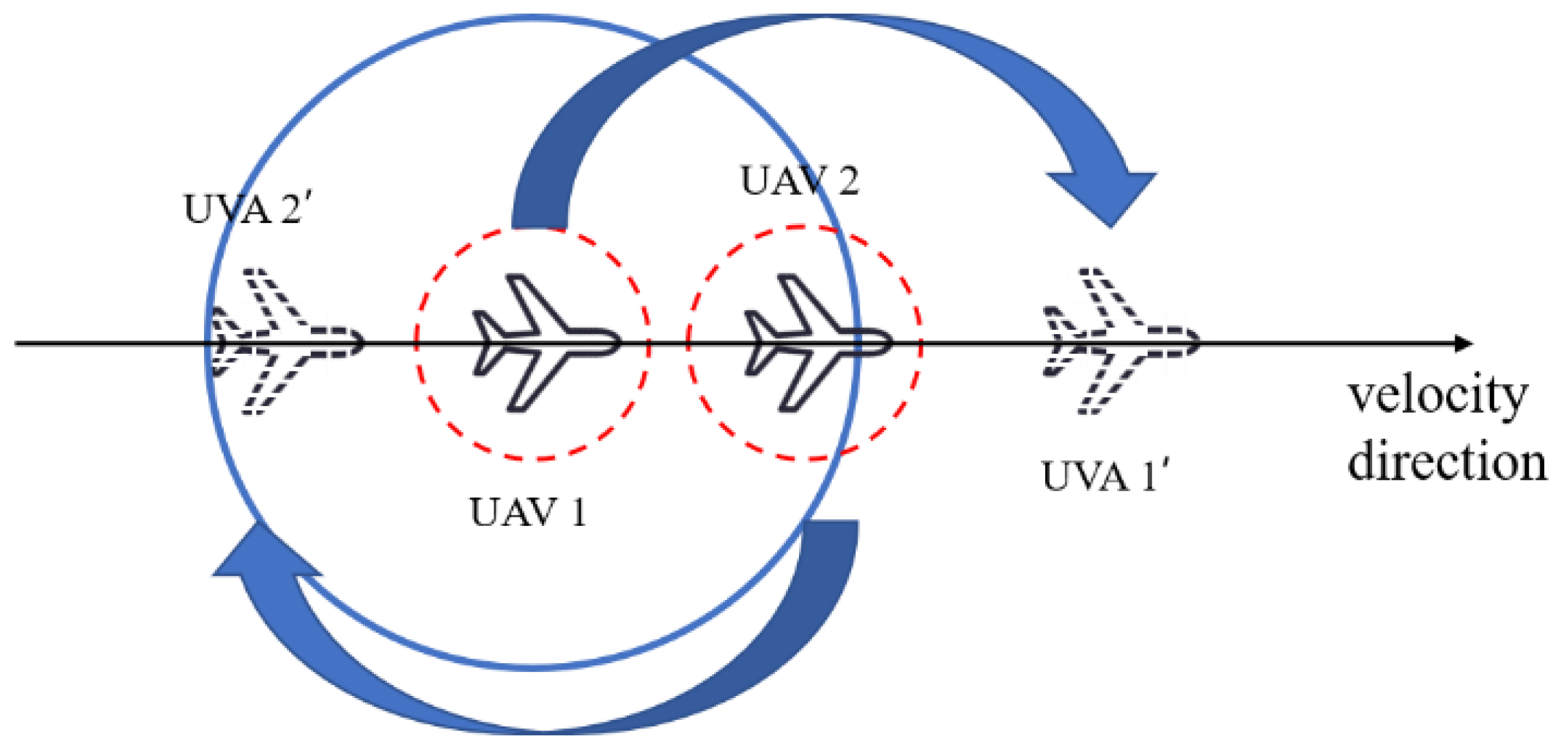
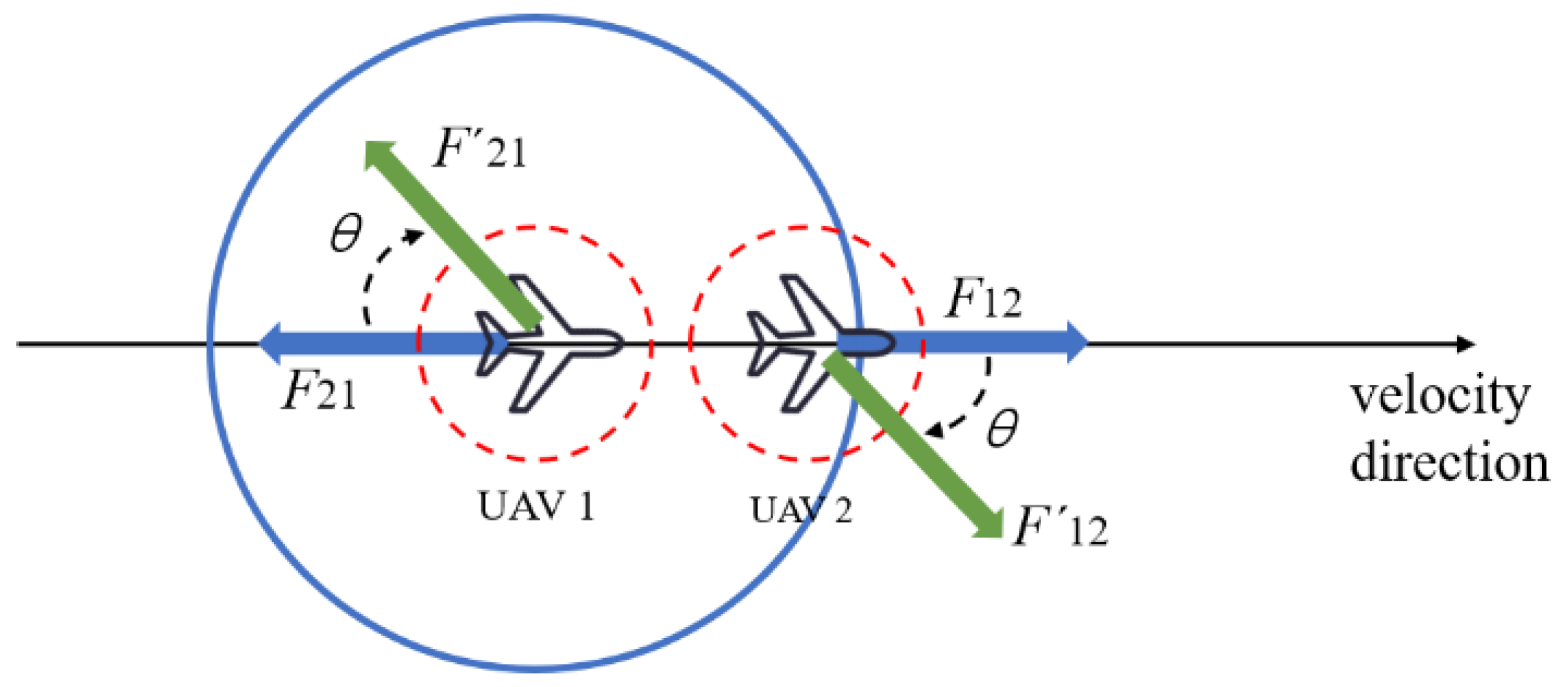
Drawing on the principles of the APF method, a new collision avoidance strategy has been developed to prevent collision among UAVs during flight.
However, the research method and simulations discussed in this paper do not account for the potential impacts of communication interference and topology switching. Future research should thus explore robust anti-interference cooperative control in environments with communication disruptions and assess formation stability in scenarios involving topology changes.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}