
Coverage Path Planning with Adaptive Hyperbolic Grid for Step-Stare Imaging System


Abstract
1. Introduction
- To the best of our knowledge, we are probably the first to study the coverage planning problem under pure rotational motion. Furthermore, in contrast to traditional heuristic algorithms for solving mixed-integer programming problems, we propose an efficient approximation method and framework based on computational geometry.
- For the first time, spherical tiling is successfully applied in the field of coverage planning. Specifically, to achieve complete coverage of the target region, we convert the coverage problem to a tiling problem on a virtual scanning sphere, then propose a spherical approximate tiling method and a corresponding hyperbolic grid of the footprint, which offers seamless coverage.
- By fully utilizing the properties of conic and projective geometry, we propose a dual-caliper optimization method to compress the hyperbolic grid. This method employs two types of “caliper” to find the optimal cell stride by computing the supporting hypersurface of the ROI in two orthogonal directions. The experimental results demonstrate its superior performance and low computational complexity.
- In order to enhance the heterogeneity of experimental data, we propose a bespoke dataset generation methodology for the evaluation of the CPP of the step-stare camera. Circular and convex polygonal regions with varying locations and sizes are randomly generated by means of a candidate radius sampling strategy and convex hull computation.
2. Related Works
2.1. Exact Cellular Decomposition
2.2. Approximate Cellular Decomposition
2.3. No Decomposition
3. System Model and Problem Formulation
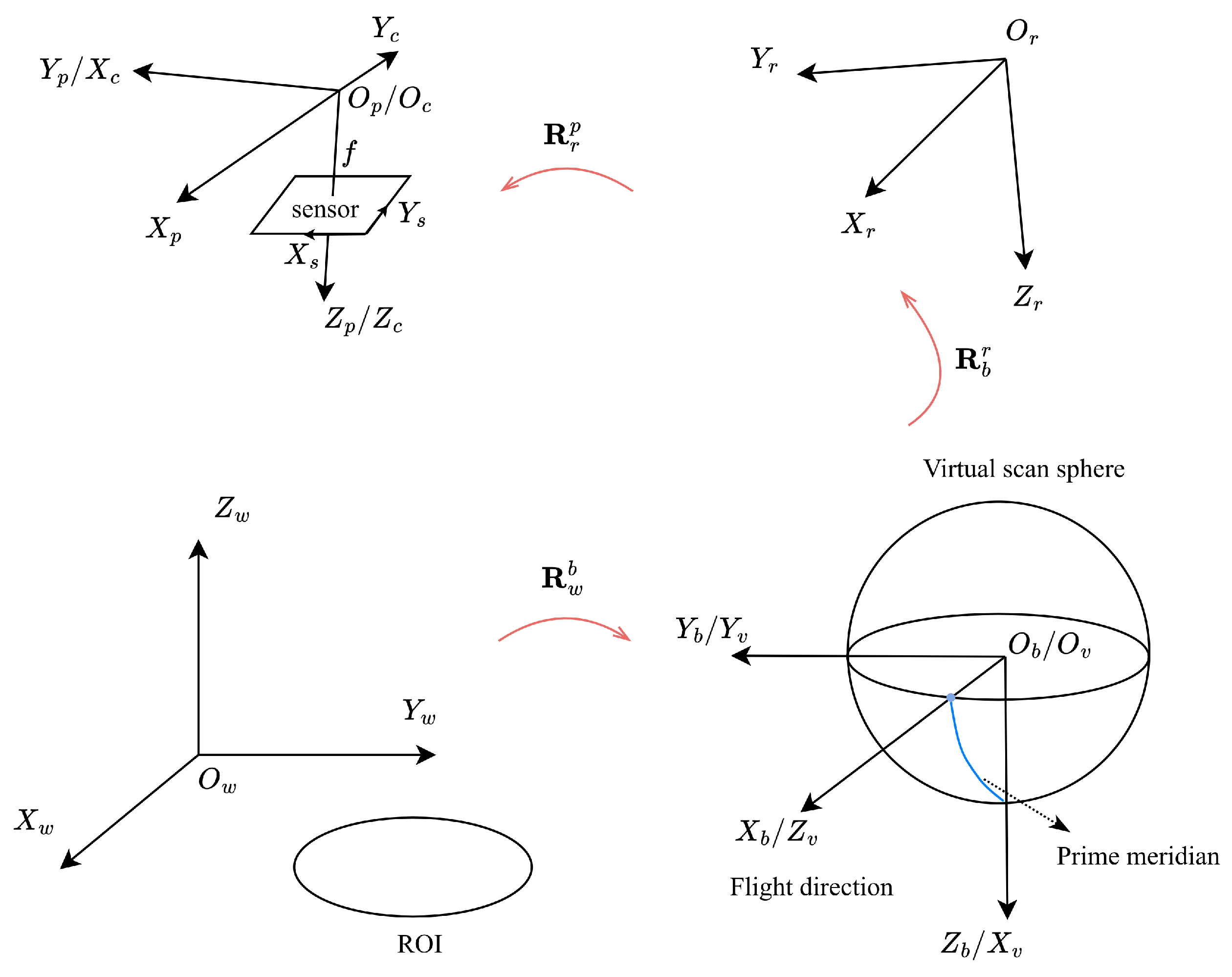
3.1. System Model
3.2. Problem Formulation
3.2.1. Path Planning Problem
3.2.2. Coverage Planning Problem
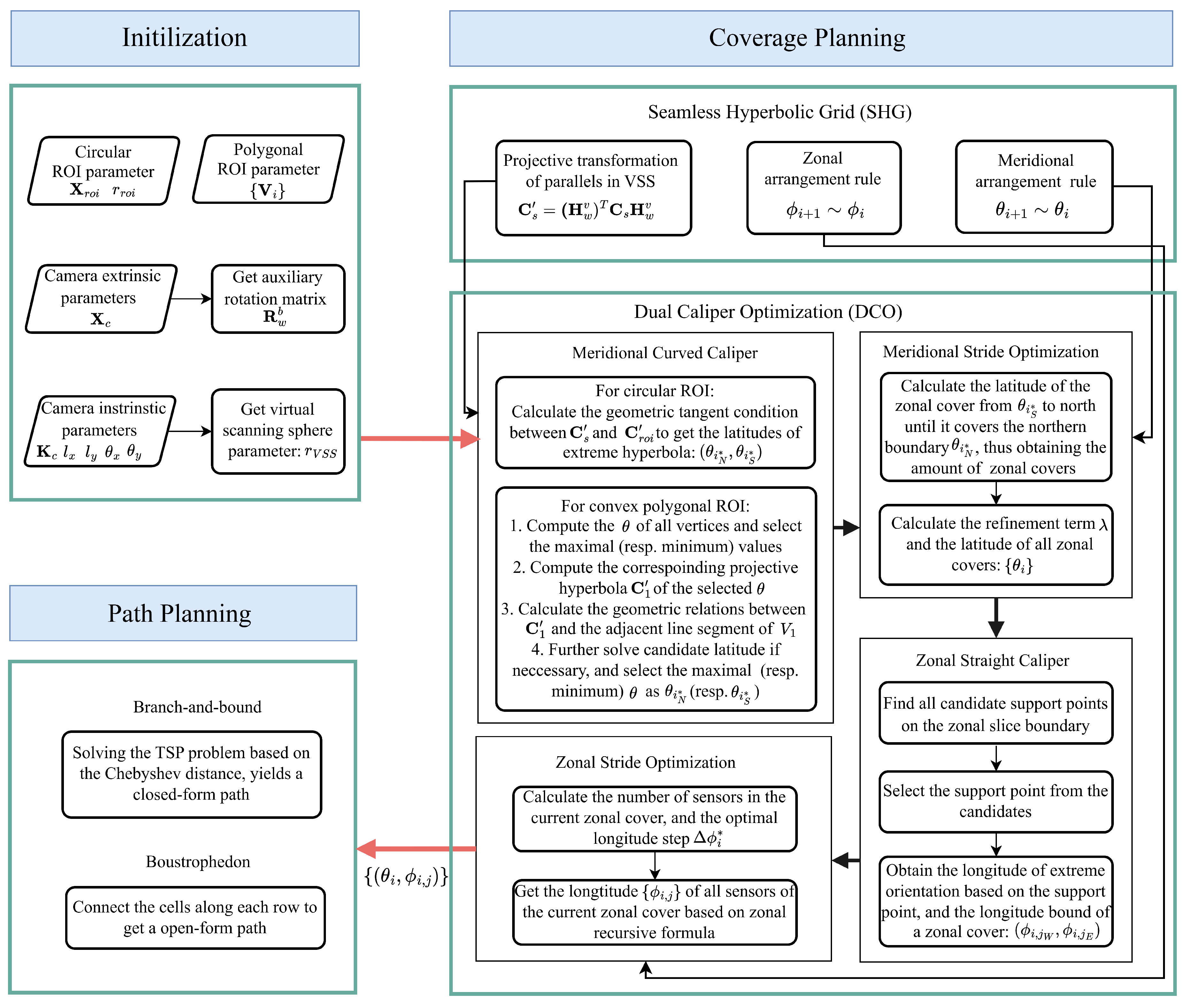
4. Proposed Method
4.1. Seamless Hyperbolic Grid
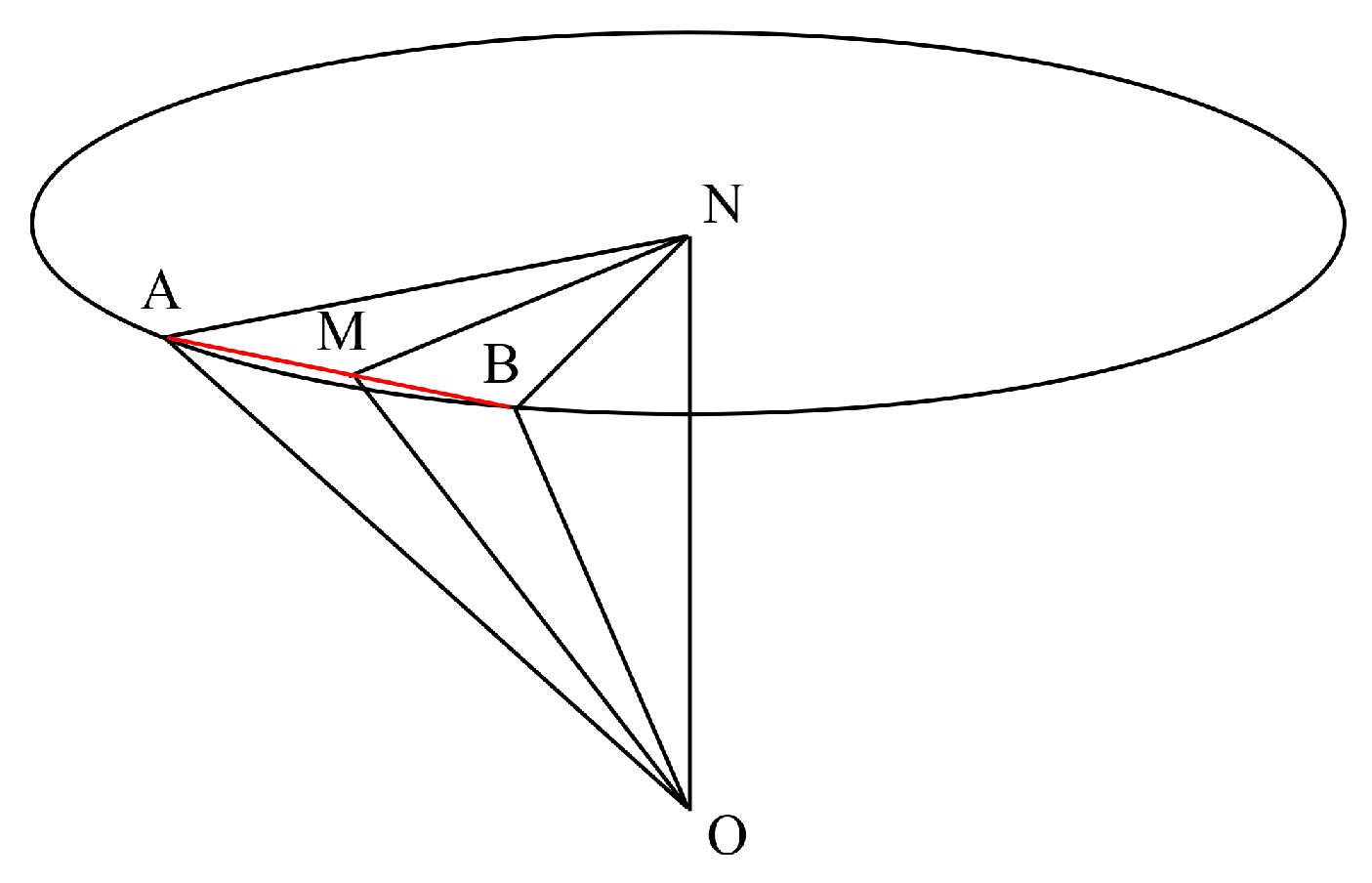
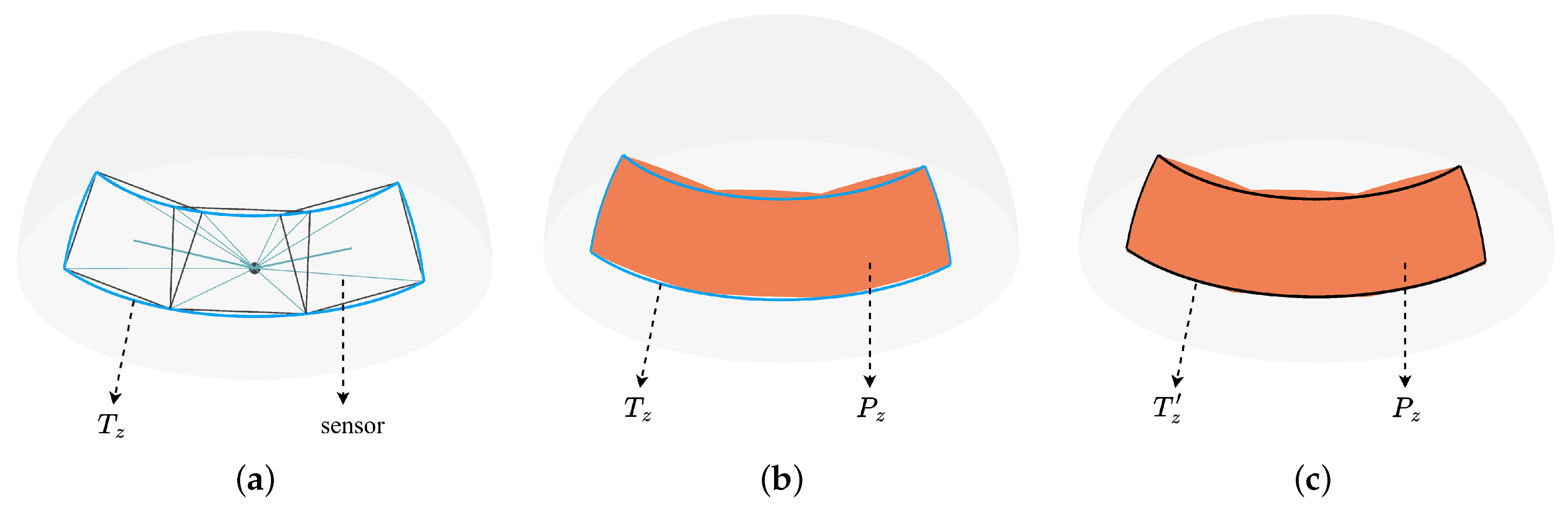
4.1.1. Equivalent Spherical Tiling
4.1.2. Approximate Tiling Method
- How to determine each roll angle (or latitude) of a sensor in a zonal cover ();
- How to determine each pitch angle (or longitude) of the zonal cover () in the meridional direction.
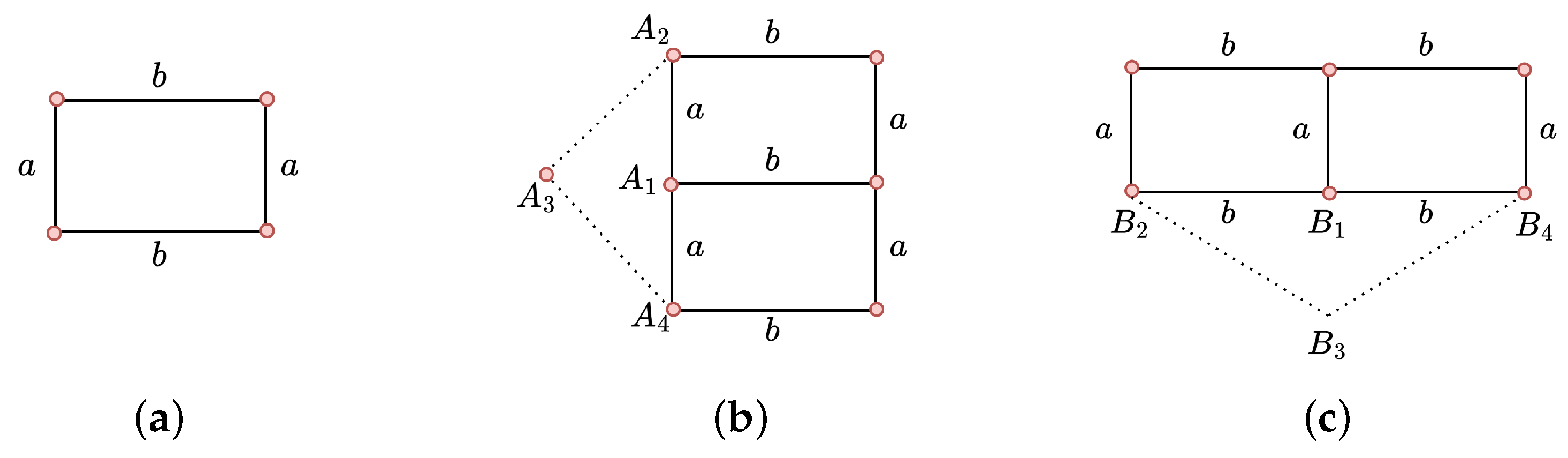
4.1.3. Zonal Arrangement
4.1.4. Meridional Arrangement
4.1.5. Hyperbolic Grid
4.2. Dual-Caliper Optimization
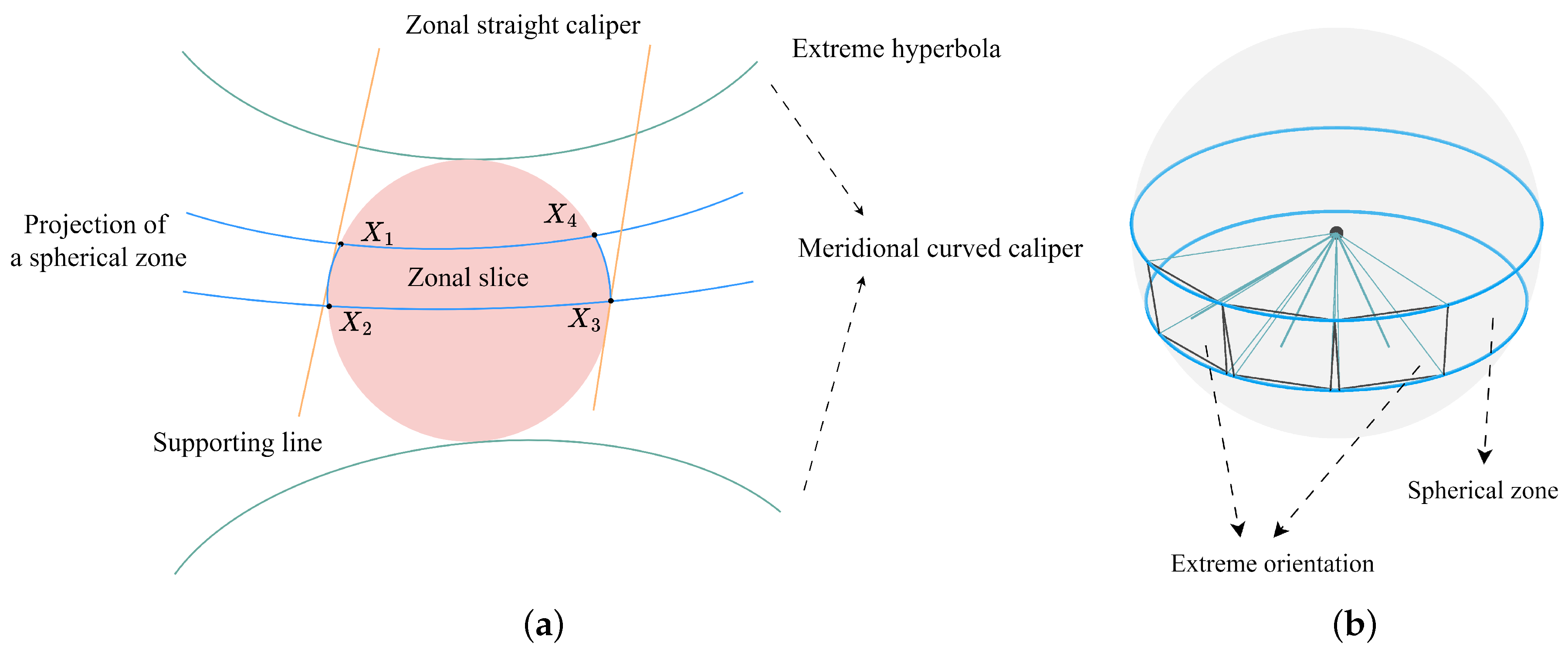
4.2.1. Meridional Curved Caliper
| Algorithm 1: Meridional Curved Caliper Algorithm for a Circular ROI |
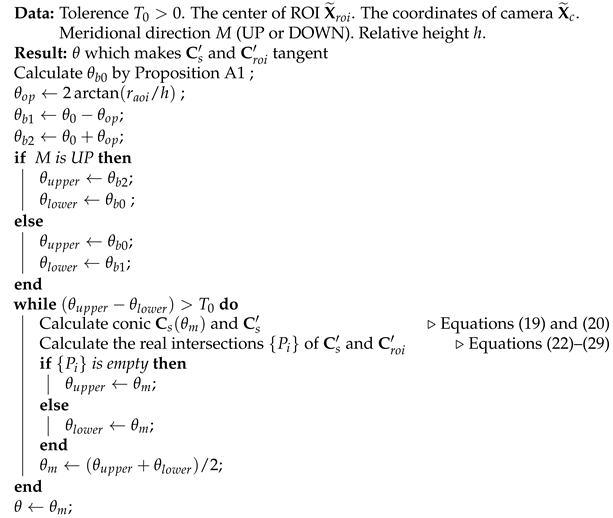 |
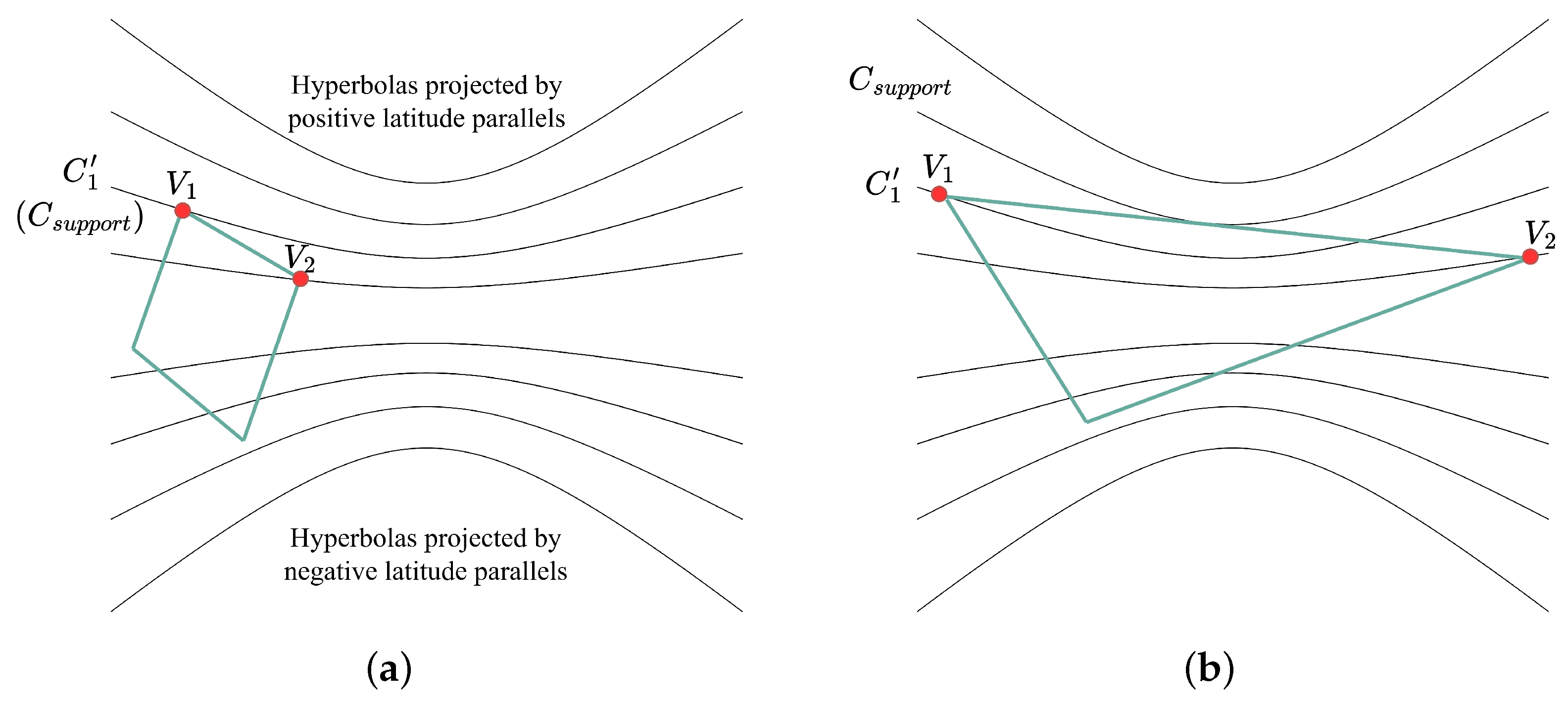
4.2.2. Meridional Stride Optimization
4.2.3. Zonal Straight Caliper
4.2.4. Zonal Stride Optimization
4.3. Path Planning
5. Results
5.1. Experimental Setup and Dataset Generation
5.2. Evaluation Metric
5.3. Ablation Study
5.4. Performance Comparison with Other Methods
6. Conclusions
- We constrained a step-stare imaging system with basic pitch and roll axes. However, for multi-axis systems with additional gimbals or mechanical linkage, the orientation of the sensor’s footprint can be adjusted with more degrees of freedom, which can further optimize the grid layout. The coverage optimization of a multi-axis system will be studied in the future.
- We assumed the carrier platform moves at a slow speed and the position of the camera is stationary during the scanning process. However, for vehicle carriers that exhibit high-speed maneuvering, the hyperbolic grid becomes time-varying, which may invalidate the coverage path plan. Further investigation is needed to design efficient coverage path planning methods in such scenarios.
- In path planning, we chose the simple Chebyshev distance as a metric. But in engineering applications, the trajectory of gimbals is usually optimized as a smooth curve [56] (e.g., Bezier curve, Dubins curve, etc.). Therefore, in future studies, the curve path length should be considered as the evaluation metric.
- The obstacle effect represents a significant factor in the planning process. When an obstacle is present in the field of view, the target area may become a concave set due to occlusion. In future work, we will incorporate obstacle effect constraints into the optimization problem and investigate the coverage planning problem in this context.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AHG | Adaptive hyperbolic grid |
| CCT | Coverage computation time |
| CPP | Coverage path planning |
| CR | Coverage rate |
| CT | Computation time |
| DCO | Dual-caliper optimization |
| DOF | Degrees of freedom |
| FF | Flood fill |
| FOV | Field of view |
| LOS | Line of sight |
| PSO | Particle swarm optimization |
| PL | Path length |
| ROI | Region of interest |
| RS | Replanning sidewinder |
| SHG | Seamless hyperbolic grid |
| SPR | Spherical pseudo rectangle |
| TSP | Traveling salesman problem |
| UAV | Unmanned aerial vehicle |
| VSS | Virtual scanning sphere |
| WAPS | Wide-area persistent surveillance |
| ZIT | Zonal isosceles trapezoid |
Appendix A. Coordinate Systems and Transformations
Appendix B. Symbol Notation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Coordinate system | |
| Projective mapping between different | |
| Projective matrix between different | |
| Rotation matrix between different | |
| Cell, i.e., enclosed area defined by the camera’s ground footprint | |
| Pitch gimbal angle or latitude | |
| Roll gimbal angle or longitude | |
| f | Focal length |
| Sensor’s horizontal field of view | |
| Sensor’s vertical field of view | |
| The width of the sensor | |
| The height of the sensor | |
| Sensor’s orientation expressed by gimbal angles | |
| A set of | |
| A zonal set of | |
| Calibration matrix | |
| P | A given region’s image of on a sphere |
| The ith sensor’s projection on a sphere | |
| The union of all in a zonal cover | |
| The zonal isosceles trapezoid determined by sensors’ corner envelope | |
| The maximal inscribed zonal isosceles trapezoid of | |
| Homogeneous coordinates of a point | |
| Inhomogeneous coordinates of a point |
Appendix C. Supplementary Propositions
References
- Cobb, M.; Reisman, M.; Killam, P.; Fiore, G.; Siddiq, R.; Giap, D.; Chern, G. Wide-area motion imagery vehicle detection in adverse conditions. In Proceedings of the 2023 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), Saint Louis, MO, USA, 27–29 September 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Negin, F.; Tabejamaat, M.; Fraisse, R.; Bremond, F. Transforming temporal embeddings to keypoint heatmaps for detection of tiny Vehicles in Wide Area Motion Imagery (WAMI) sequences. In Proceedings of the IEEE 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), New Orleans, LA, USA, 19–20 June 2022; pp. 1431–1440. [Google Scholar] [CrossRef]
- Sommer, L.; Kruger, W.; Teutsch, M. Appearance and motion based persistent multiple object tracking in Wide Area Motion Imagery. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Montreal, BC, Canada, 11–17 October 2021; pp. 3871–3881. [Google Scholar] [CrossRef]
- Li, X.; He, B.; Ding, K.; Guo, W.; Huang, B.; Wu, L. Wide-Area and Real-Time Object Search System of UAV. Remote. Sens. 2022, 14, 1234. [Google Scholar] [CrossRef]
- Luo, X.; Zhang, F.; Pu, M.; Guo, Y.; Li, X.; Ma, X. Recent Advances of Wide-Angle Metalenses: Principle, Design, and Applications. Nanophotonics 2021, 11, 1–20. [Google Scholar] [CrossRef]
- Driggers, R.; Goranson, G.; Butrimas, S.; Holst, G.; Furxhi, O. Simple Target Acquisition Model Based on Fλ/d. Opt. Eng. 2021, 60, 023104. [Google Scholar] [CrossRef]
- Stamenov, I.; Arianpour, A.; Olivas, S.J.; Agurok, I.P.; Johnson, A.R.; Stack, R.A.; Morrison, R.L.; Ford, J.E. Panoramic Monocentric Imaging Using Fiber-Coupled Focal Planes. Opt. Express 2014, 22, 31708. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Fu, Y.; Zhang, G.; Liu, Z. Modeling and Analysis of a Monocentric Multi-Scale Optical System. Opt. Express 2020, 28, 32657. [Google Scholar] [CrossRef] [PubMed]
- Yuan, X.; Ji, M.; Wu, J.; Brady, D.J.; Dai, Q.; Fang, L. A Modular Hierarchical Array Camera. Light Sci. Appl. 2021, 10, 37. [Google Scholar] [CrossRef] [PubMed]
- Daniel, B.; Henry, D.J.; Cheng, B.T.; Wilson, M.L.; Edelberg, J.; Jensen, M.; Johnson, T.; Anderson, S. Autonomous collection of dynamically-cued multi-sensor imagery. In Proceedings of the SPIE Defense, Security, and Sensing, Orlando, FL, USA, 13 May 2011; p. 80200A. [Google Scholar]
- Kruer, M.R.; Lee, J.N.; Linne Von Berg, D.; Howard, J.G.; Edelberg, J. System considerations of aerial infrared imaging for wide-area persistent surveillance. In Proceedings of the SPIE Defense, Security and Sensing, Orlando, FL, USA, 13 May 2011; p. 80140J. [Google Scholar]
- Driggers, R.G.; Halford, C.; Theisen, M.J.; Gaudiosi, D.M.; Olson, S.C.; Tener, G.D. Staring Array Infrared Search and Track Performance with Dither and Stare Step. Opt. Eng. 2018, 57, 1. [Google Scholar] [CrossRef]
- Driggers, R.; Pollak, E.; Grimming, R.; Velazquez, E.; Short, R.; Holst, G.; Furxhi, O. Detection of Small Targets in the Infrared: An Infrared Search and Track Tutorial. Appl. Opt. 2021, 60, 4762. [Google Scholar] [CrossRef]
- Sun, J.; Ding, Y.; Zhang, H.; Yuan, G.; Zheng, Y. Conceptual Design and Image Motion Compensation Rate Analysis of Two-Axis Fast Steering Mirror for Dynamic Scan and Stare Imaging System. Sensors 2021, 21, 6441. [Google Scholar] [CrossRef]
- Xiu, J.; Huang, P.; Li, J.; Zhang, H.; Li, Y. Line of Sight and Image Motion Compensation for Step and Stare Imaging System. Appl. Sci. 2020, 10, 7119. [Google Scholar] [CrossRef]
- Fu, Q.; Zhang, X.; Zhang, J.; Shi, G.; Zhao, S.; Liu, M. Non-Rotationally Symmetric Field Mapping for Back-Scanned Step/Stare Imaging System. Appl. Sci. 2020, 10, 2399. [Google Scholar] [CrossRef]
- Miller, J.L.; Way, S.; Ellison, B.; Archer, C. Design Challenges Regarding High-Definition Electro-Optic/Infrared Stabilized Imaging Systems. Opt. Eng. 2013, 52, 061310. [Google Scholar] [CrossRef]
- Choset, H. Coverage for Robotics—A Survey of Recent Results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A Survey on Coverage Path Planning for Robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Cabreira, T.; Brisolara, L.; Ferreira, P.R., Jr. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Tan, C.S.; Mohd-Mokhtar, R.; Arshad, M.R. A Comprehensive Review of Coverage Path Planning in Robotics Using Classical and Heuristic Algorithms. IEEE Access 2021, 9, 119310–119342. [Google Scholar] [CrossRef]
- Đakulovic, M.; Petrovic, I. Complete Coverage Path Planning of Mobile Robots for Humanitarian Demining. Ind. Robot. Int. J. 2012, 39, 484–493. [Google Scholar] [CrossRef]
- Acar, E.U.; Choset, H.; Zhang, Y.; Schervish, M. Path Planning for Robotic Demining: Robust Sensor-Based Coverage of Unstructured Environments and Probabilistic Methods. Int. J. Robot. Res. 2003, 22, 441–466. [Google Scholar] [CrossRef]
- Latombe, J.C. Robot Motion Planning; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; pp. 206–207. [Google Scholar]
- Choset, H.; Pignon, P. Coverage path planning: The boustrophedon cellular decompositio. In Field and Service Robotics; Springer: London, UK, 1998; pp. 203–209. [Google Scholar]
- Coombes, M.; Fletcher, T.; Chen, W.-H.; Liu, C. Optimal Polygon Decomposition for UAV Survey Coverage Path Planning in Wind. Sensors 2018, 18, 2132. [Google Scholar] [CrossRef]
- Tang, G.; Tang, C.; Zhou, H.; Claramunt, C.; Men, S. R-DFS: A Coverage Path Planning Approach Based on Region Optimal Decomposition. Remote Sens. 2021, 13, 1525. [Google Scholar] [CrossRef]
- Nam, L.; Huang, L.; Li, X.J.; Xu, J. An approach for coverage path planning for UAVs. In Proceedings of the 2016 IEEE 14th International Workshop on Advanced Motion Control (AMC), Auckland, New Zealand, 22–24 April 2016; pp. 411–416. [Google Scholar]
- Cao, Y.; Cheng, X.; Mu, J. Concentrated Coverage Path Planning Algorithm of UAV Formation for Aerial Photography. IEEE Sens. J. 2022, 22, 11098–11111. [Google Scholar] [CrossRef]
- Shang, Z.; Bradley, J.; Shen, Z. A Co-Optimal Coverage Path Planning Method for Aerial Scanning of Complex Structures. Expert Syst. Appl. 2020, 158, 113535. [Google Scholar] [CrossRef]
- Shao, E.; Byon, A.; Davies, C.; Davis, E.; Knight, R.; Lewellen, G.; Trowbridge, M.; Chien, S. Area coverage planning with 3-axis steerable, 2D framing sensors. In Proceedings of the Scheduling and Planning Applications Workshop, International Conference on Automated Planning and Scheduling, Delft, The Netherlands, 26 June 2018. [Google Scholar]
- Vasquez-Gomez, J.I.; Marciano-Melchor, M.; Valentin, L.; Herrera-Lozada, J.C. Coverage Path Planning for 2D Convex Regions. J. Intell. Robot. Syst. 2020, 97, 81–94. [Google Scholar] [CrossRef]
- Mansouri, S.S.; Kanellakis, C.; Georgoulas, G.; Kominiak, D.; Gustafsson, T.; Nikolakopoulos, G. 2D Visual Area Coverage and Path Planning Coupled with Camera Footprints. Control. Eng. Pract. 2018, 75, 1–16. [Google Scholar] [CrossRef]
- Papaioannou, S.; Kolios, P.; Theocharides, T.; Panayiotou, C.G.; Polycarpou, M.M. Integrated Guidance and Gimbal Control for Coverage Planning With Visibility Constraints. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 1–15. [Google Scholar] [CrossRef]
- Li, S.; Zhong, M. High-Precision Disturbance Compensation for a Three-Axis Gyro-Stabilized Camera Mount. IEEE/ASME Trans. Mechatron. 2015, 20, 3135–3147. [Google Scholar] [CrossRef]
- Megiddo, N.; Zemel, E.; Hakimi, S.L. The Maximum Coverage Location Problem. SIAM J. Algebr. Discret. Methods 1983, 4, 253–261. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, P.; Hu, Q.; Ai, M.; Hu, D.; Li, J. A UAV-Based Panoramic Oblique Photogrammetry (POP) Approach Using Spherical Projection. ISPRS J. Photogramm. Remote Sens. 2020, 159, 198–219. [Google Scholar] [CrossRef]
- Beckers, B.; Beckers, P. A General Rule for Disk and Hemisphere Partition into Equal-Area Cells. Comput. Geom. 2012, 45, 275–283. [Google Scholar] [CrossRef]
- Liang, X.; Ben, J.; Wang, R.; Liang, Q.; Huang, X.; Ding, J. Construction of Rhombic Triacontahedron Discrete Global Grid Systems. Int. J. Digit. Earth 2022, 15, 1760–1783. [Google Scholar] [CrossRef]
- Li, G.; Wang, L.; Zheng, R.; Yu, X.; Ma, Y.; Liu, X.; Liu, B. Research on Partitioning Algorithm Based on Dynamic Star Simulator Guide Star Catalog. IEEE Access 2021, 9, 54663–54670. [Google Scholar] [CrossRef]
- Kim, J.-S.; Hwangbo, M.; Kanade, T. Spherical Approximation for Multiple Cameras in Motion Estimation: Its Applicability and Advantages. Comput. Vis. Image Underst. 2010, 114, 1068–1083. [Google Scholar] [CrossRef]
- Ueno, Y.; Yoshio, Y. Examples of Spherical Tilings by Congruent Quadrangles. In Memoirs of the Faculty of Integrated Arts and Sciences; IV, Science Reports; Hiroshima University: Hiroshima, Japan, 2001; Volume 27, pp. 135–144. [Google Scholar]
- Avelino, C.P.; Santos, A.F. Spherical F-Tilings by Scalene Triangles and Isosceles Trapezoids, I. Eur. J. Comb. 2009, 30, 1221–1244. [Google Scholar] [CrossRef]
- Leopardi, P. A Partition of the Unit Sphere into Regions of Equal Area and Small Diameter. Electron. Trans. Numer. Anal. 2006, 25, 309–327. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: New York, NY, USA, 2003; pp. 153–157. [Google Scholar]
- Toussaint, G. Solving geometric problems with the rotating calipers. In Proceedings of the 1983 IEEE MELECON, Athens, Greece, 24–26 May 1983. [Google Scholar]
- Richter-Gebert, J. Perspectives on Projective Geometry: A Guided Tour Through Real and Complex Geometry, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 190–193. [Google Scholar]
- Dantzig, G.; Fulkerson, R.; Johnson, S. Solution of a Large-Scale Traveling-Salesman Problem. J. Oper. Res. Soc. Am. 1954, 2, 393–410. [Google Scholar] [CrossRef]
- Sanches, D.; Whitley, D.; Tinós, R. Improving an exact solver for the traveling salesman problem using partition crossover. In Proceedings of the 2017 Genetic and Evolutionary Computation Conference, Berlin, Germany, 15–19 July 2017; pp. 337–344. [Google Scholar]
- Tao, R.; Gavves, E.; Smeulders, A.W.M. Siamese instance search for tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1420–1429. [Google Scholar]
- He, Y.; Hu, T.; Zeng, D. Scan-flood fill (SCAFF): An efficient automatic precise region filling algorithm for complicated regions. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Long Beach, CA, USA, 15–20 June 2019; pp. 761–769. [Google Scholar]
- Verma, V.; Carsten, J.; Ravine, M.; Kennedy, M.R.; Edgett, K.S.; Culver, A.; Ruoff, N.; Williams, N.; Beegle, L. How do we get robots to take self-portraits on Mars? Perseverance-ingenuity and curiosity selfies. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5 March 2022; pp. 1–14. [Google Scholar]
- Urban, R.; Štroner, M.; Blistan, P.; Kovanič, Ľ.; Patera, M.; Jacko, S.; Ďuriška, I.; Kelemen, M.; Szabo, S. The Suitability of UAS for Mass Movement Monitoring Caused by Torrential Rainfall—A Study on the Talus Cones in the Alpine Terrain in High Tatras, Slovakia. ISPRS Int. J. Geo-Inf. 2019, 8, 317. [Google Scholar] [CrossRef]
- Núñez-Andrés, M.A.; Prades-Valls, A.; Matas, G.; Buill, F.; Lantada, N. New Approach for Photogrammetric Rock Slope Premonitory Movements Monitoring. Remote Sens. 2023, 15, 293. [Google Scholar] [CrossRef]
- Lyons, M.B.; Brandis, K.J.; Murray, N.J.; Wilshire, J.H.; McCann, J.A.; Kingsford, R.T.; Callaghan, C.T. Monitoring Large and Complex Wildlife Aggregations with Drones. Methods Ecol. Evol. 2019, 10, 1024–1035. [Google Scholar] [CrossRef]
- Mier, G.; Valente, J.; de Bruin, S. Fields2Cover: An Open-Source Coverage Path Planning Library for Unmanned Agricultural Vehicles. IEEE Robot. Autom. Lett. 2023, 8, 2166–2172. [Google Scholar] [CrossRef]





| Parameter | Value |
|---|---|
| Focal length | 50 mm |
| Pixel size | 12 m |
| Number of pixels | |
| Relative height | 5000 m |
| Spatial resolution threshold * | 2 m |
| SHG | DCO | Circular ROI | Convex Polygonal ROI |
|---|---|---|---|
| 69.5% | 42.0% | ||
| ✓ | 100.0% | 100.0% | |
| ✓ | 98.0% | 97.5% | |
| ✓ | ✓ | 100.0% | 100.0% |
| No. | Circle | Convex Polygon | ||||||
|---|---|---|---|---|---|---|---|---|
| AHG (%) | FF (%) | PSO (%) | RP (%) | AHG (%) | FF (%) | PSO (%) | RP (%) | |
| 1 | ||||||||
| 2 | ||||||||
| 3 | ||||||||
| 4 | ||||||||
| 5 | ||||||||
| 6 | ||||||||
| 7 | ||||||||
| 8 | ||||||||
| 9 | ||||||||
| 10 | ||||||||
| No. | Circle | Convex Polygon | ||||||
|---|---|---|---|---|---|---|---|---|
| AHG | FF | PSO | RP | AHG | FF | PSO | RP | |
| 1 | ||||||||
| 2 | ||||||||
| 3 | ||||||||
| 4 | ||||||||
| 5 | ||||||||
| 6 | ||||||||
| 7 | ||||||||
| 8 | ||||||||
| 9 | ||||||||
| 10 | ||||||||
| No. | Circle | Convex Polygon | ||||||
|---|---|---|---|---|---|---|---|---|
| AHG (ms) | FF (ms) | PSO (s) | RP (ms) | AHG (ms) | FF (ms) | PSO (s) | RP (ms) | |
| 1 | ||||||||
| 2 | ||||||||
| 3 | ||||||||
| 4 | ||||||||
| 5 | ||||||||
| 6 | ||||||||
| 7 | ||||||||
| 8 | ||||||||
| 9 | ||||||||
| 10 | ||||||||
| No. | Circle | Convex Polygon | ||||
|---|---|---|---|---|---|---|
| AHG (ms) | FF (ms) | RS (ms) | AHG (ms) | FF (ms) | RS (ms) | |
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
| 7 | ||||||
| 8 | ||||||
| 9 | ||||||
| 10 | ||||||
| No. | Circle | Convex Polygon | ||||||
|---|---|---|---|---|---|---|---|---|
| AHG (ms) | FF (ms) | PSO (s) | RP (ms) | AHG (ms) | FF (ms) | PSO (s) | RP (ms) | |
| 1 | ||||||||
| 2 | ||||||||
| 3 | ||||||||
| 4 | ||||||||
| 5 | ||||||||
| 6 | ||||||||
| 7 | ||||||||
| 8 | ||||||||
| 9 | ||||||||
| 10 | ||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J. Coverage Path Planning with Adaptive Hyperbolic Grid for Step-Stare Imaging System. Drones 2024, 8, 242. https://doi.org/10.3390/drones8060242
Zhao J. Coverage Path Planning with Adaptive Hyperbolic Grid for Step-Stare Imaging System. Drones. 2024; 8(6):242. https://doi.org/10.3390/drones8060242
Chicago/Turabian StyleZhao, Jiaxin. 2024. "Coverage Path Planning with Adaptive Hyperbolic Grid for Step-Stare Imaging System" Drones 8, no. 6: 242. https://doi.org/10.3390/drones8060242
APA StyleZhao, J. (2024). Coverage Path Planning with Adaptive Hyperbolic Grid for Step-Stare Imaging System. Drones, 8(6), 242. https://doi.org/10.3390/drones8060242