
Assessing the Severity of Verticillium Wilt in Cotton Fields and Constructing Pesticide Application Prescription Maps Using Unmanned Aerial Vehicle (UAV) Multispectral Images


Abstract
1. Introduction
2. Materials and Methods
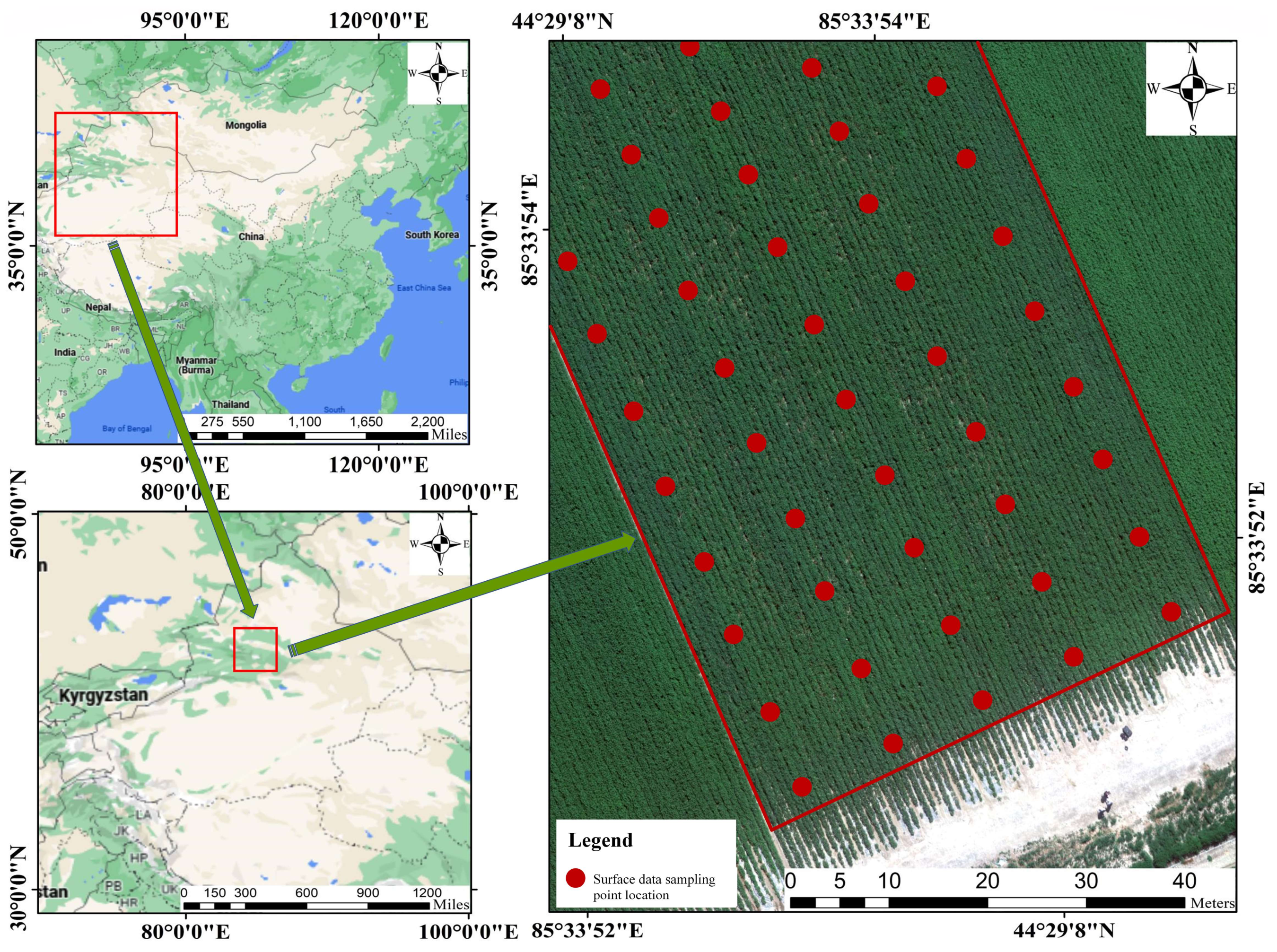
2.1. Study Area
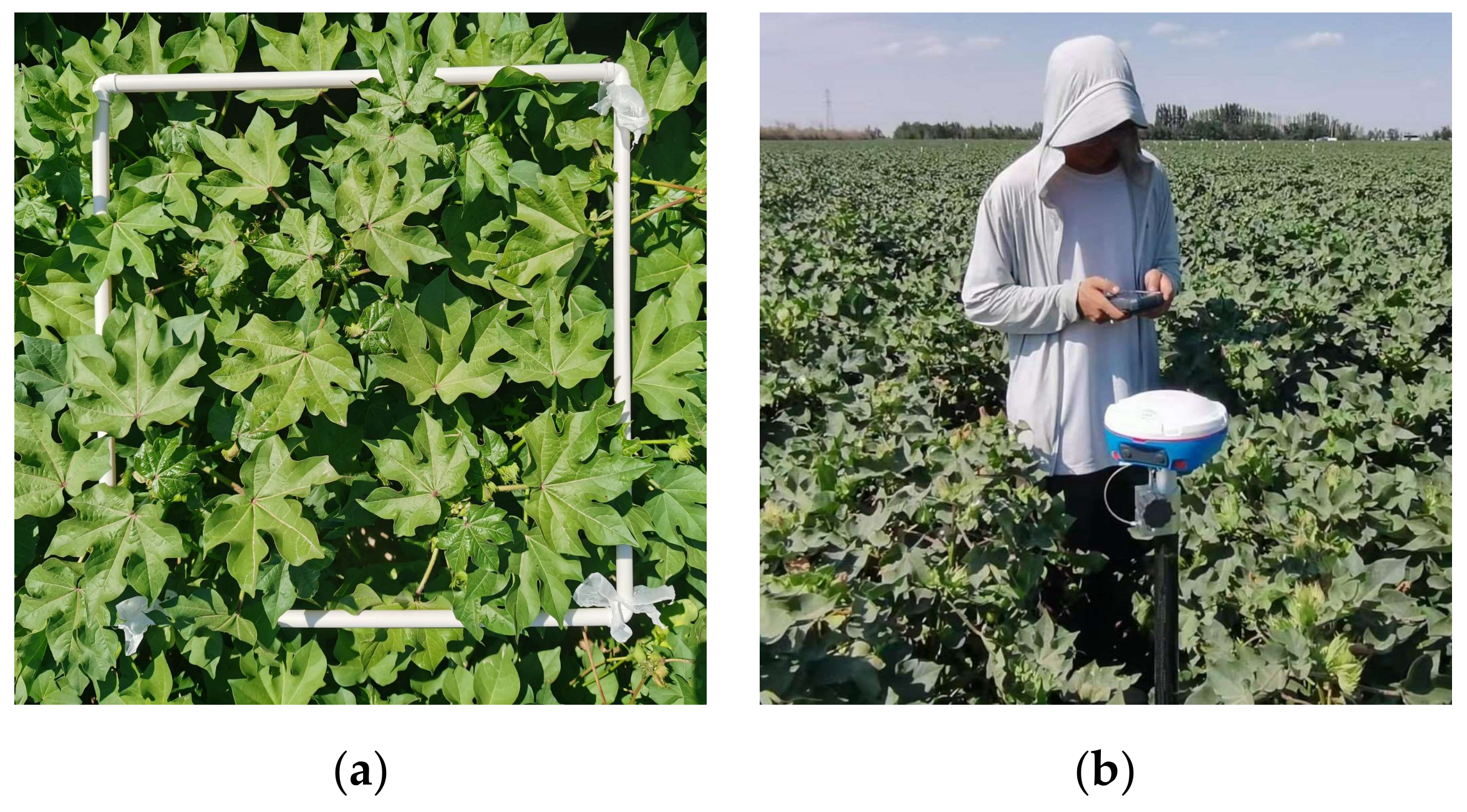
2.2. Data Acquisition
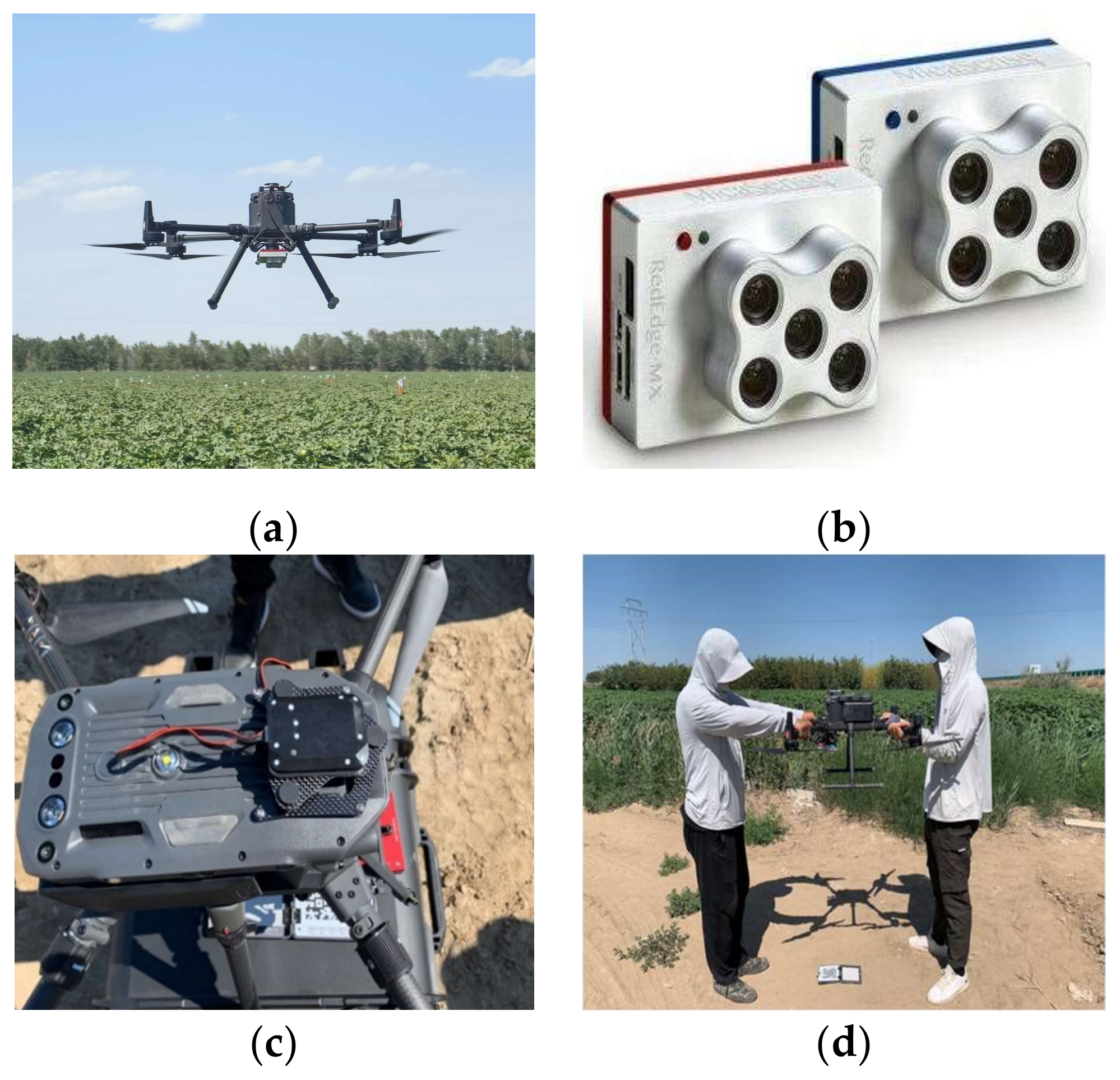
2.2.1. Acquisition of Multispectral Images by Unmanned Aerial Vehicle
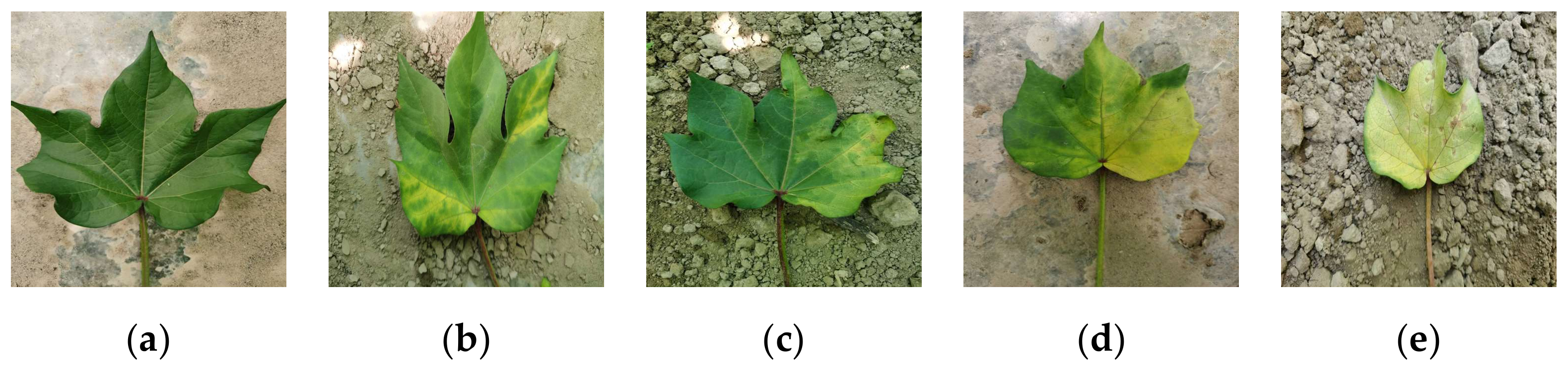
2.2.2. Classification of Verticillium Wilt Disease Severity in the Field
2.2.3. Unmanned Aerial Vehicle (UAV) Image Data Preprocessing
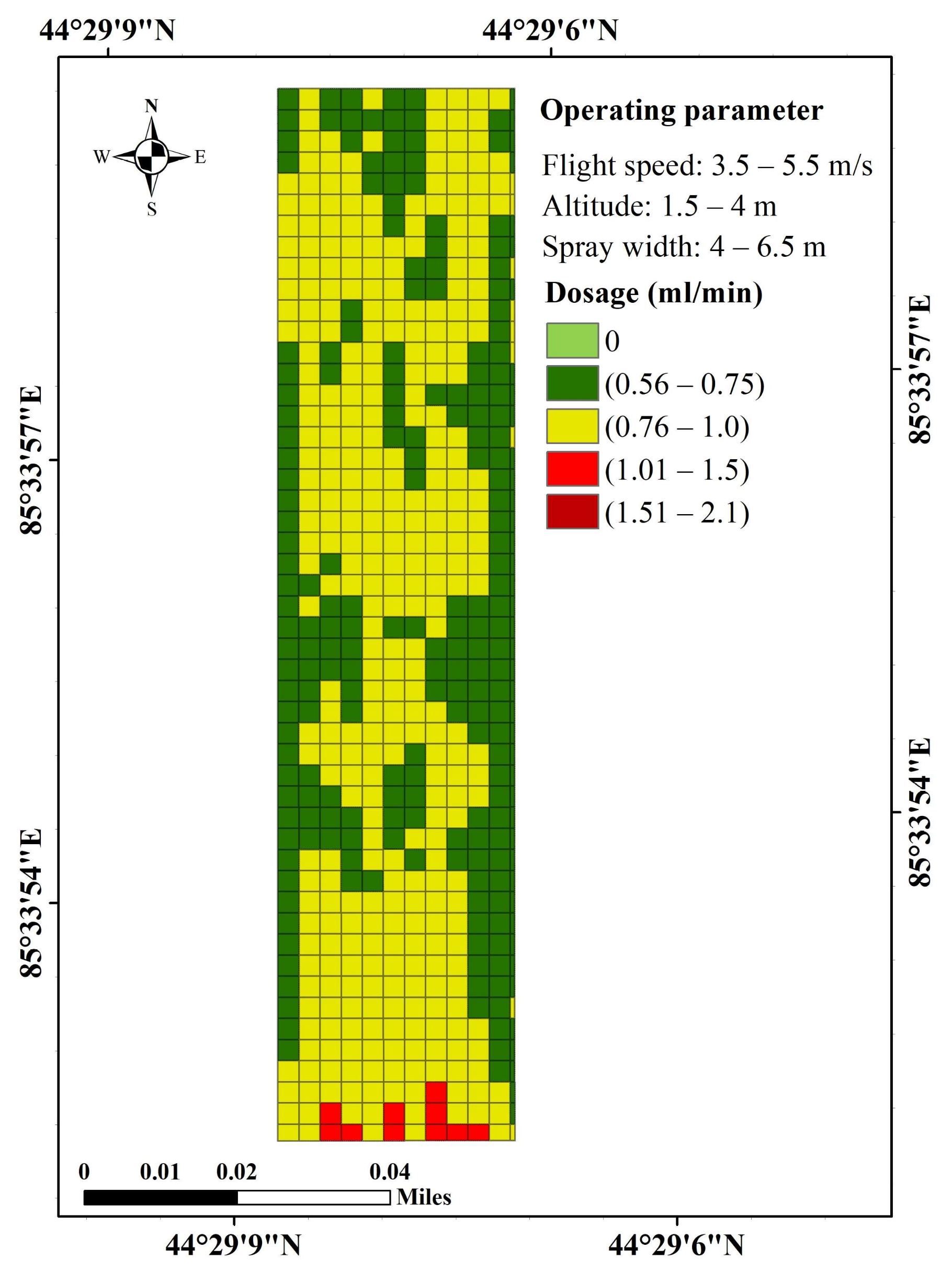
2.2.4. Setting Parameters for Agricultural Drone Operation
2.3. Data Analysis and Evaluation
2.3.1. Partial Least Squares Regression
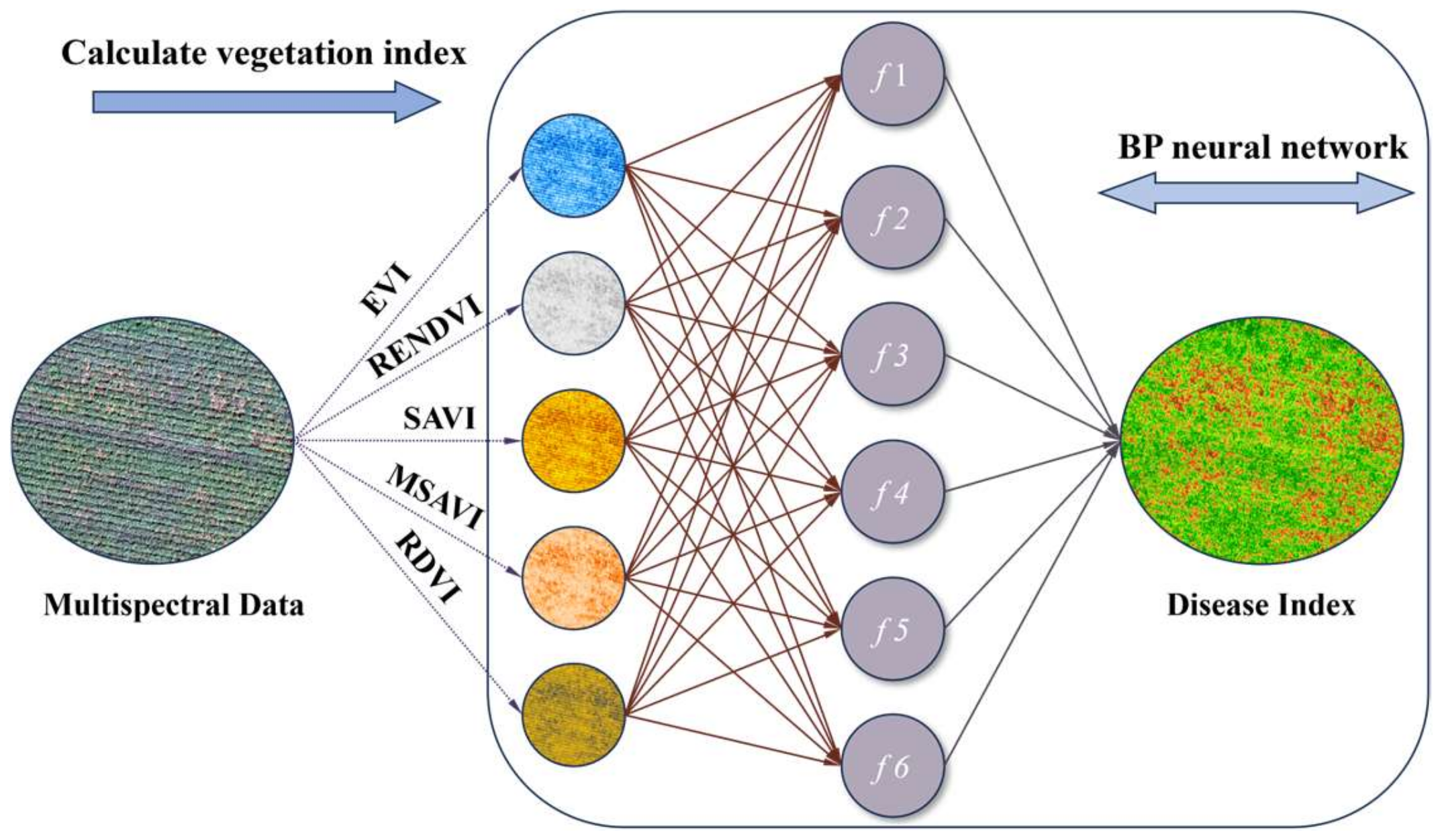
2.3.2. Backpropagation Neural Network
2.3.3. Model Evaluation Indicators
3. Results
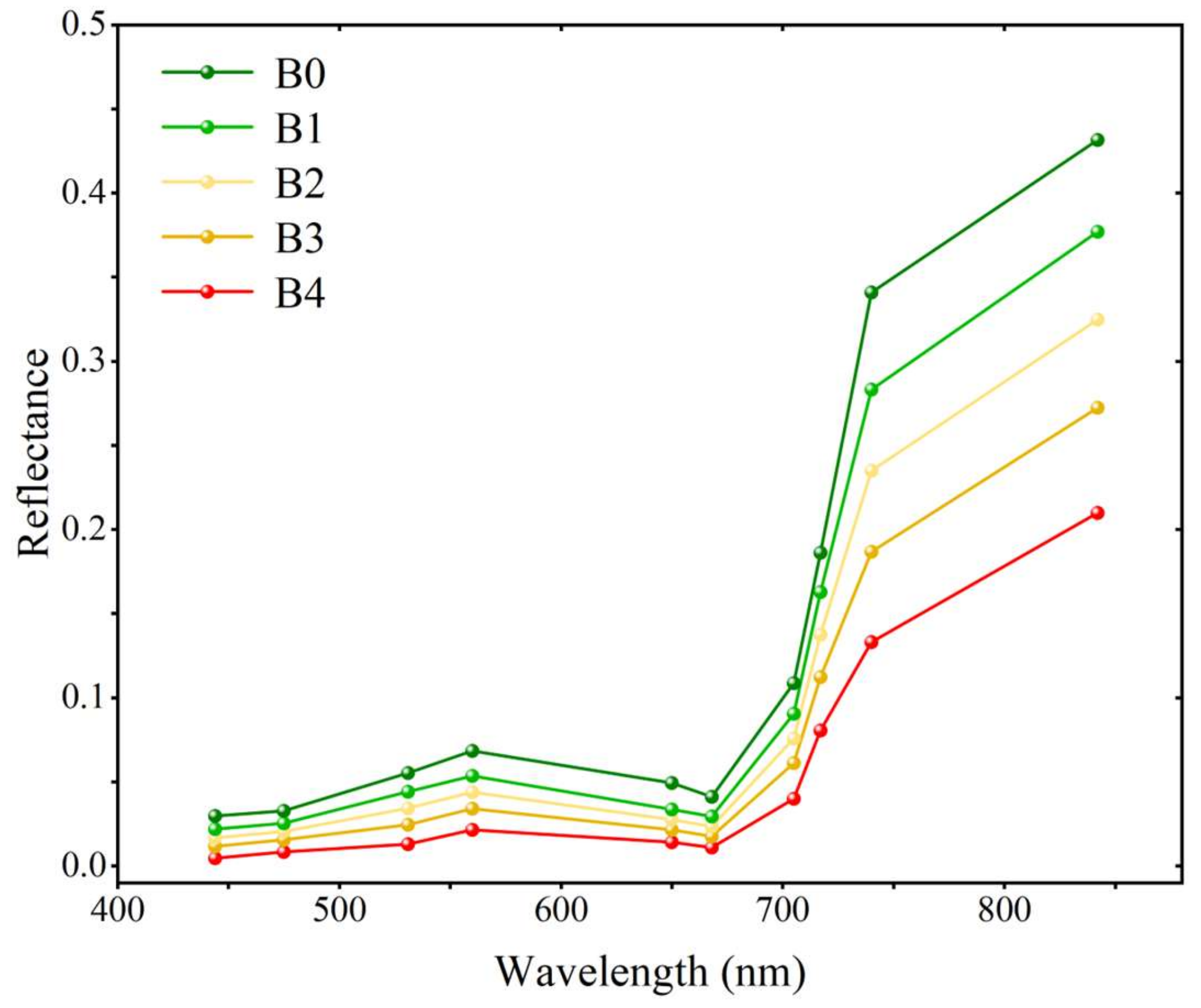
3.1. Analysis of Spectral Characteristics of Cotton Canopy at Different Disease Levels
3.2. Data Modeling
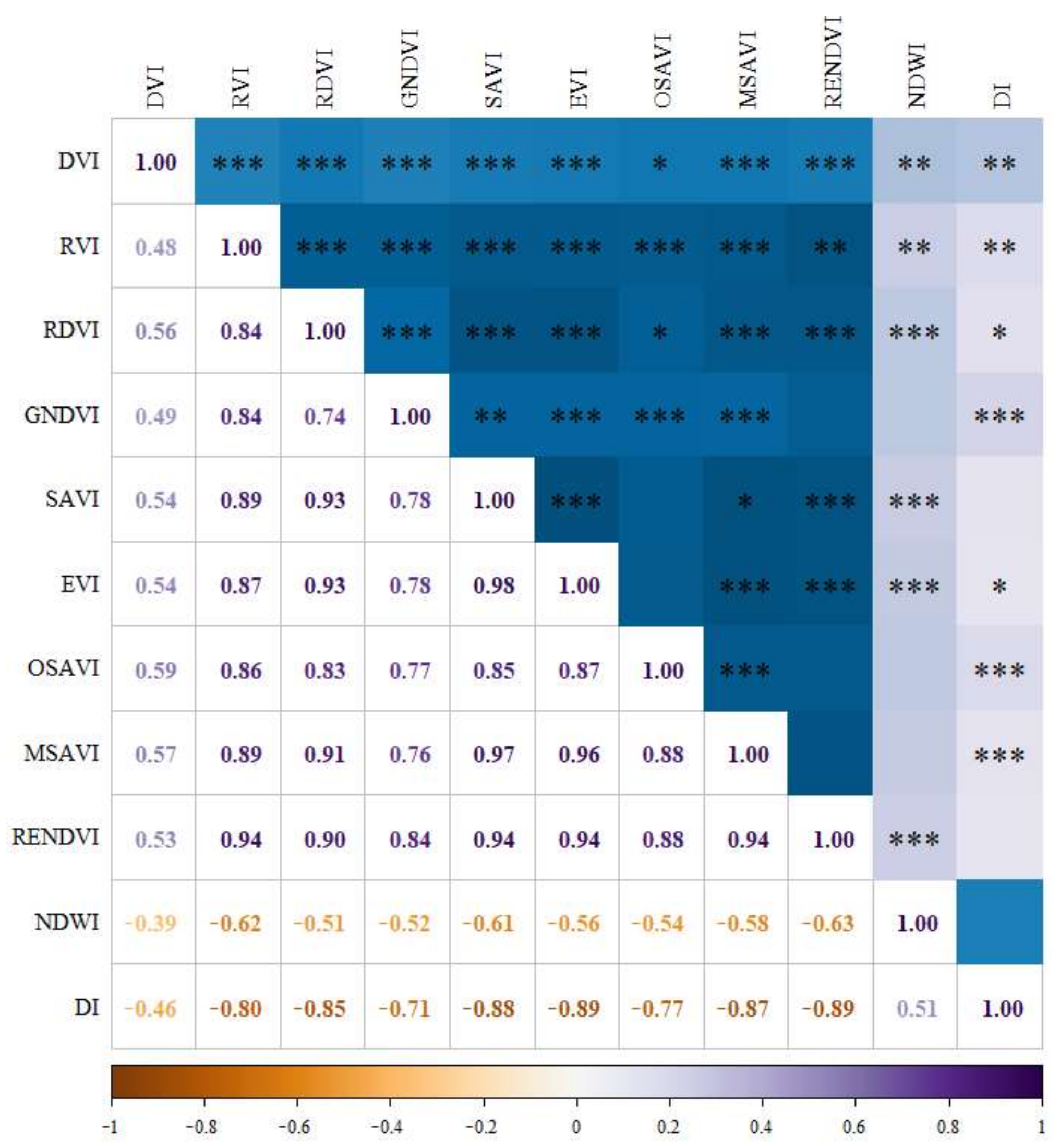
3.2.1. Correlation Analysis
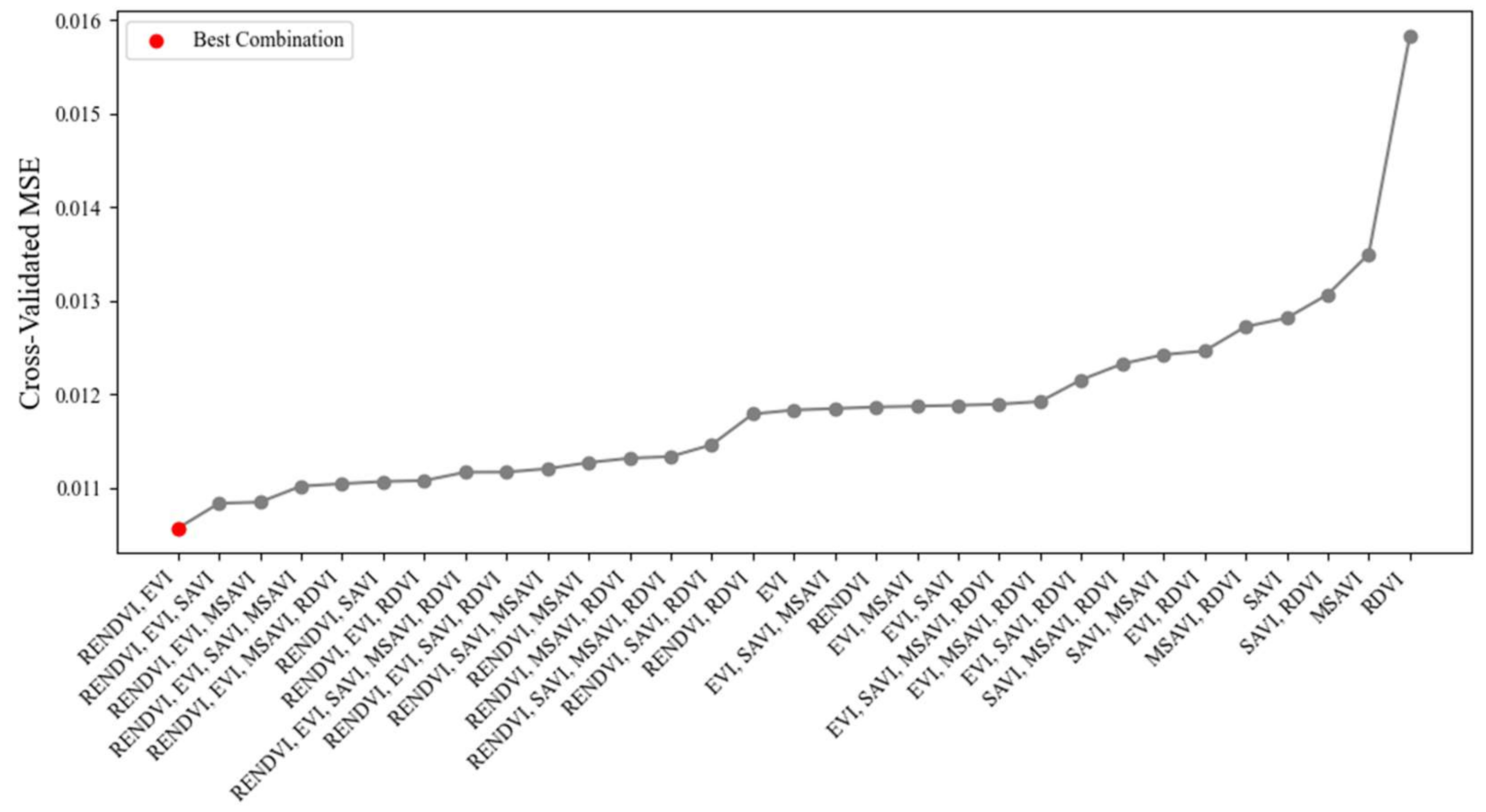
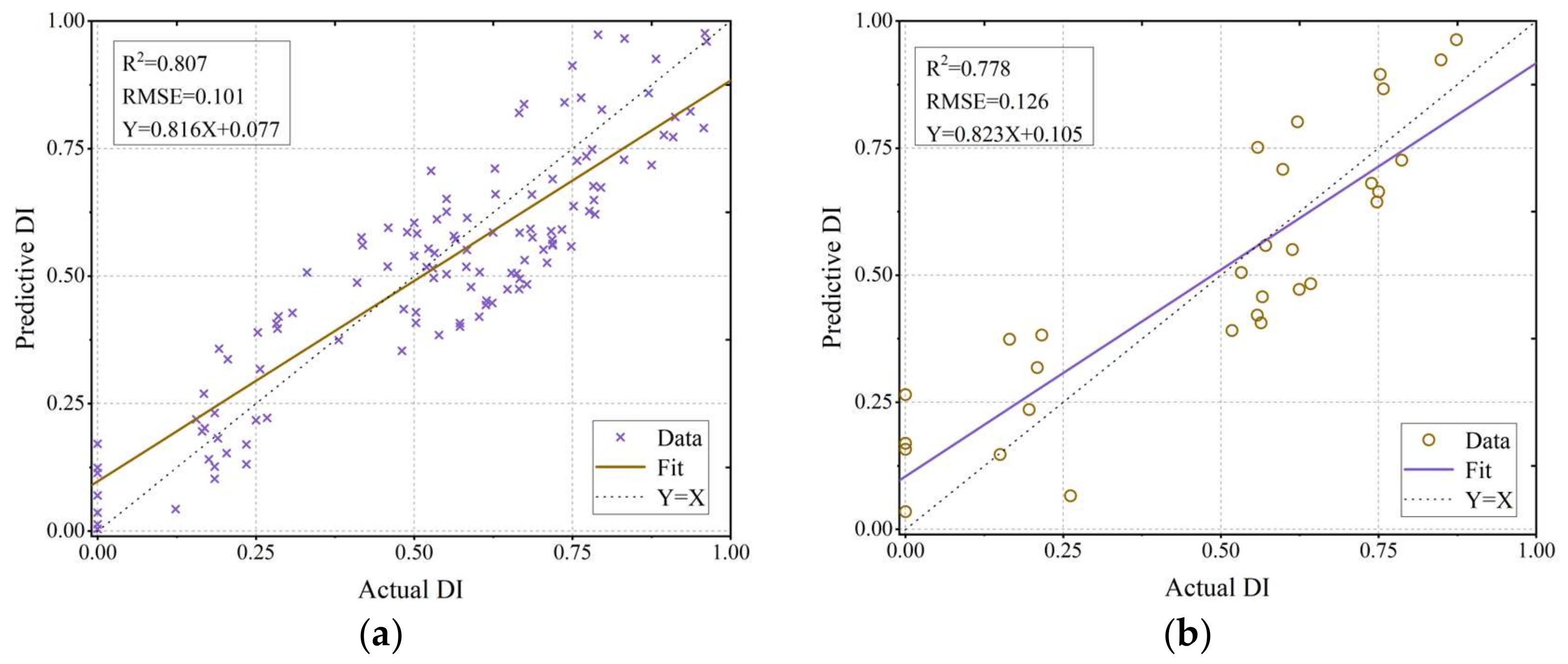
3.2.2. Partial Least Squares Regression Model
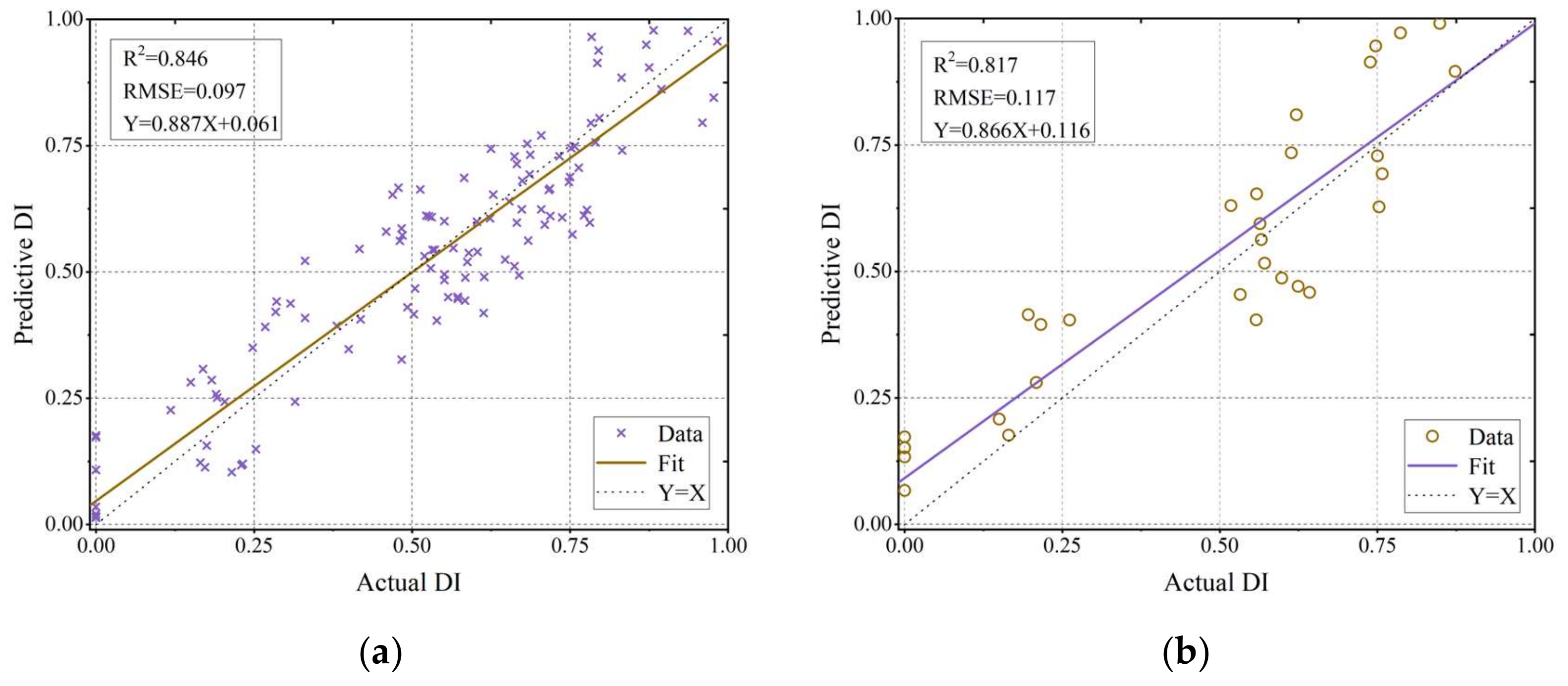
3.2.3. Backpropagation Neural Network Model
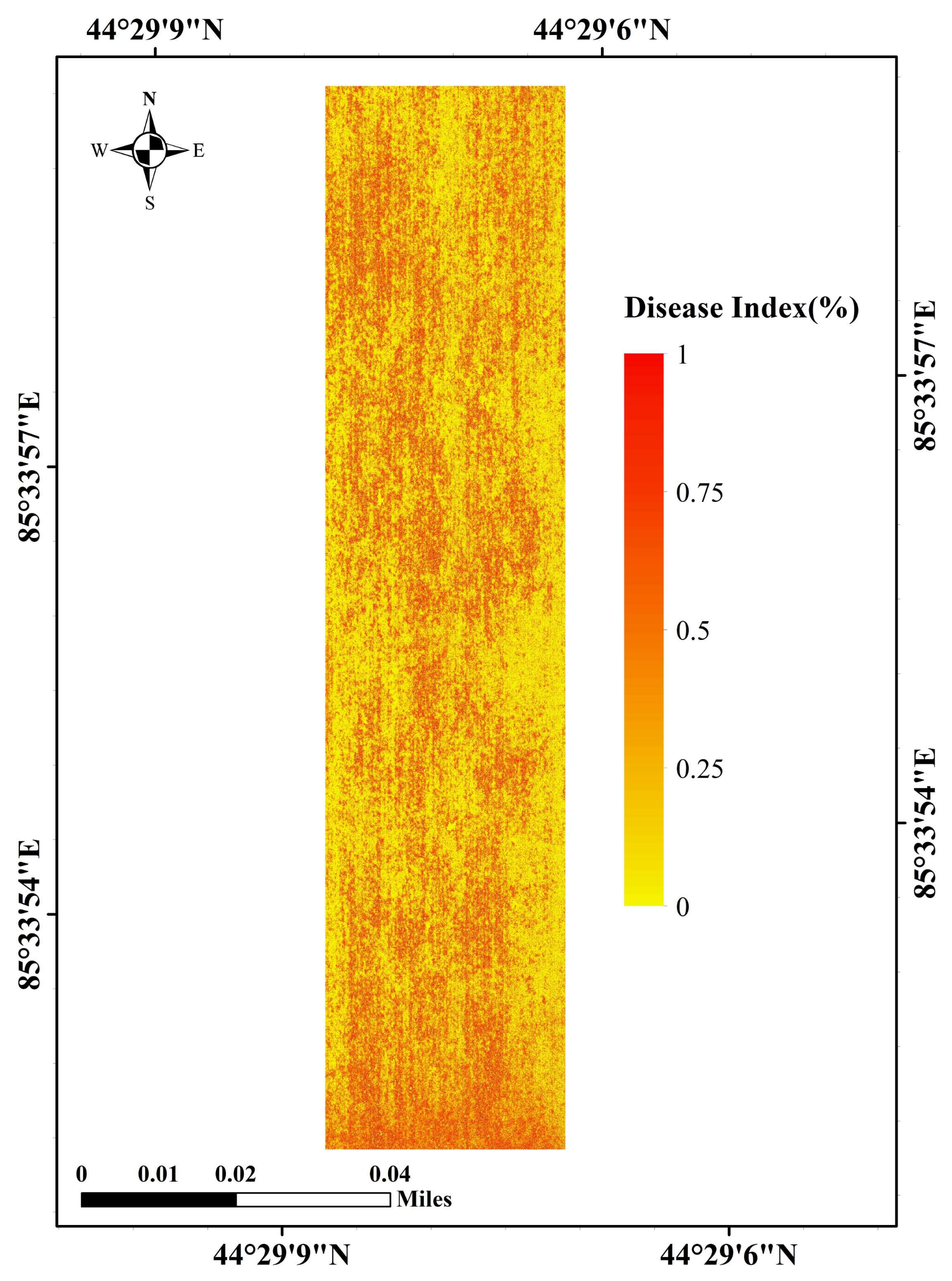
3.3. Cotton Verticillium Wilt Severity Assessment
3.4. Application Prescription Map Construction
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shi, G.; Du, X.; Du, M.; Li, Q.; Tian, X.; Ren, Y.; Zhang, Y.; Wang, H. Cotton yield estimation using the remotely sensed cotton boll index from uav images. Drones 2022, 6, 254. [Google Scholar] [CrossRef]
- Kang, X.; Huang, C.; Zhang, L.; Yang, M.; Zhang, Z.; Lyu, X. Assessing the severity of cotton verticillium wilt disease from in situ canopy images and spectra using convolutional neural networks. Crop J. 2023, 11, 933–940. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, X.; Shang, P.; Ma, R.; Yuan, X.; Li, L.; Bai, T. Detection of cotton verticillium wilt disease severity based on hyperspectrum and gwo-svm. Remote Sens. 2023, 15, 3373. [Google Scholar] [CrossRef]
- Azath, M.; Zekiwos, M.; Bruck, A.; Li, Y. Deep learning-based image processing for cotton leaf disease and pest diagnosis. J. Electr. Comput. Eng. 2021, 2021, 9981437. [Google Scholar]
- Kumar, S.; Jain, A.; Shukla, A.P.; Singh, S.; Raja, R.; Rani, S.; Harshitha, G.; Alzain, M.A.; Masud, M.; Singh, D.D. A comparative analysis of machine learning algorithms for detection of organic and nonorganic cotton diseases. Math. Probl. Eng. 2021, 2021, 1790171. [Google Scholar] [CrossRef]
- Chin, R.; Catal, C.; Kassahun, A. Plant disease detection using drones in precision agriculture. Precis. Agric. 2023, 24, 1663–1682. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, B.; Hu, Y.; Li, C.; Li, Y. Accurate cotton diseases and pests detection in complex background based on an improved yolox model. Comput. Electron. Agric. 2022, 203, 107484. [Google Scholar] [CrossRef]
- Dou, Z.; Fang, Z.; Han, X.; Liu, Y.; Duan, L.; Zeeshan, M.; Arshad, M. Comparison of the effects of chemical topping agent sprayed by a uav and a boom sprayer on cotton growth. Agronomy 2022, 12, 1625. [Google Scholar] [CrossRef]
- Pergner, I.; Lippert, C. On the effects that motivate pesticide use in perspective of designing a cropping system without pesticides but with mineral fertilizer—A review. Agron. Sustain. Dev. 2023, 43, 24. [Google Scholar] [CrossRef]
- Khan, B.A.; Nadeem, M.A.; Nawaz, H.; Amin, M.M.; Abbasi, G.H.; Nadeem, M.; Ali, M.; Ameen, M.; Javaid, M.M.; Maqbool, R.; et al. Pesticides: Impacts on agriculture productivity, environment, and management strategies. In Emerging Contaminants and Plants: Interactions, Adaptations and Remediation Technologies; Springer: Berlin/Heidelberg, Germany, 2023; pp. 109–134. [Google Scholar]
- Tahir, M.N.; Lan, Y.; Zhang, Y.; Huang, W.J.; Wang, Y.; Naqvi, S.M.Z.A. Application of unmanned aerial vehicles in precision agriculture. In Precision Agriculture; Elsevier: Amsterdam, The Netherlands, 2023; pp. 55–70. [Google Scholar]
- Xavier, T.W.F.; Souto, R.N.V.; Statella, T.; Galbieri, R.; Santos, E.S.; Suli, G.S.; Zeilhofer, P. Identification of ramularia leaf blight cotton disease infection levels by multispectral, multiscale uav imagery. Drones 2019, 3, 33. [Google Scholar] [CrossRef]
- Wang, T.; Thomasson, J.A.; Yang, C.; Isakeit, T.; Nichols, R.L. Automatic classification of cotton root rot disease based on uav remote sensing. Remote Sens. 2020, 12, 1310. [Google Scholar] [CrossRef]
- Abdalla, A.; Wheeler, T.A.; Dever, J.; Lin, Z.; Arce, J.; Guo, W. Assessing fusarium oxysporum disease severity in cotton using unmanned aerial system images and a hybrid domain adaptation deep learning time series model. Biosyst. Eng. 2024, 237, 220–231. [Google Scholar] [CrossRef]
- Wang, C.; Chen, Y.; Xiao, Z.; Zeng, X.; Tang, S.; Lin, F.; Zhang, L.; Meng, X.; Liu, S. Cotton blight identification with ground framed canopy photo-assisted multispectral uav images. Agronomy 2023, 13, 1222. [Google Scholar] [CrossRef]
- Lu, Z.; Huang, S.; Zhang, X.; Shi, Y.; Yang, W.; Zhu, L.; Huang, C. Intelligent identification on cotton verticillium wilt based on spectral and image feature fusion. Plant Methods 2023, 19, 75. [Google Scholar] [CrossRef] [PubMed]
- Seol, J.; Kim, J.; Son, H.I. Field evaluations of a deep learning-based intelligent spraying robot with flow control for pear orchards. Precis. Agric. 2022, 23, 712–732. [Google Scholar] [CrossRef]
- Storey, G.; Meng, Q.; Li, B. Leaf disease segmentation and detection in apple orchards for precise smart spraying in sustainable agriculture. Sustainability 2022, 14, 1458. [Google Scholar] [CrossRef]
- Zanin, A.; Neves, D.C.; Teodoro, L.; Da, S.J.C.; Da, S.S.; Teodoro, P.E.; Baio, F. Reduction of pesticide application via real-time precision spraying. Sci. Rep. 2022, 12, 5638. [Google Scholar] [CrossRef] [PubMed]
- Campos, J.; Garcia-Ruiz, F.; Gil, E. Assessment of vineyard canopy characteristics from vigour maps obtained using uav and satellite imagery. Sensors 2021, 21, 2363. [Google Scholar] [CrossRef]
- Yu, F.; Bai, J.; Jin, Z.; Zhang, H.; Guo, Z.; Chen, C. Research on precise fertilization method of rice tillering stage based on uav hyperspectral remote sensing prescription map. Agronomy 2022, 12, 2893. [Google Scholar] [CrossRef]
- Rudd, J.D.; Roberson, G.T. Using unmanned aircraft systems to develop variable rate prescription maps for cotton defoliants. In 2018 ASABE Annual International Meeting; ASABE: St. Joseph, MI, USA, 2018; p. 1. [Google Scholar]
- Li, X.; Duan, F.; Hu, M.; Hua, J.; Du, X. Weed density detection method based on a high weed pressure dataset and improved psp net. IEEE Access 2023, 11, 98244–98255. [Google Scholar] [CrossRef]
- Chen, B.; Wang, J.; Wang, Q.; Yu, Y.; Song, Y.; Sun, L.; Han, H.; Wang, F. Yield loss estimation of verticillium wilt cotton field based on uav multi-spectral and regression model. In Proceedings of the 2022 Global Conference on Robotics, Artificial Intelligence and Information Technology (GCRAIT), Chicago, IL, USA, 30–31 July 2022. [Google Scholar]
- Qiao, L.; Tang, W.; Gao, D.; Zhao, R.; An, L.; Li, M.; Sun, H.; Song, D. Uav-based chlorophyll content estimation by evaluating vegetation index responses under different crop coverages. Comput. Electron. Agr. 2022, 196, 106775. [Google Scholar] [CrossRef]
- Aldubai, A.A.; Alsadon, A.A.; Al-Gaadi, K.A.; Tola, E.; Ibrahim, A.A. Utilizing spectral vegetation indices for yield assessment of tomato genotypes grown in arid conditions. Saudi J. Biol. Sci. 2022, 29, 2506–2513. [Google Scholar] [CrossRef] [PubMed]
- Radócz, L.; Szabó, A.; Tamás, A.; Illés, Á.; Bojtor, C.; Ragán, P.; Vad, A.; Széles, A.; Harsányi, E.; Radócz, L. Investigation of the detectability of corn smut fungus (ustilago maydis dc. Corda) infection based on uav multispectral technology. Agronomy 2023, 13, 1499. [Google Scholar] [CrossRef]
- Shahi, T.B.; Xu, C.; Neupane, A.; Guo, W. Recent advances in crop disease detection using uav and deep learning techniques. Remote Sens. 2023, 15, 2450. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf-area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Zhao, H.; Yang, Y.; Yang, C.; Song, R.; Guo, W. Evaluation of spatial resolution on crop disease detection based on multiscale images and category variance ratio. Comput. Electron. Agric. 2023, 207, 107743. [Google Scholar] [CrossRef]
- Gao, C.; Ji, X.; He, Q.; Gong, Z.; Sun, H.; Wen, T.; Guo, W. Monitoring of wheat fusarium head blight on spectral and textural analysis of uav multispectral imagery. Agriculture 2023, 13, 293. [Google Scholar] [CrossRef]
- Jiang, P.; Zhou, X.; Liu, T.; Guo, X.; Ma, D.; Zhang, C.; Li, Y.; Liu, S. Prediction dynamics in cotton aphid using unmanned aerial vehicle multispectral images and vegetation indices. IEEE Access 2023, 11, 5908–5918. [Google Scholar] [CrossRef]
- Lizarazo, I.; Rodriguez, J.L.; Cristancho, O.; Olaya, F.; Duarte, M.; Prieto, F. Identification of symptoms related to potato verticillium wilt from uav-based multispectral imagery using an ensemble of gradient boosting machines. Smart Agric. Technol. 2023, 3, 100138. [Google Scholar] [CrossRef]
- Nguyen, C.; Sagan, V.; Skobalski, J.; Severo, J.I. Early detection of wheat yellow rust disease and its impact on terminal yield with multi-spectral uav-imagery. Remote Sens. 2023, 15, 3301. [Google Scholar] [CrossRef]
- Zhang, R.; Hewitt, A.J.; Chen, L.; Li, L.; Tang, Q. Challenges and opportunities of unmanned aerial vehicles as a new tool for crop pest control. Pest Manag. Sci. 2023, 79, 4123–4131. [Google Scholar] [CrossRef]
- Shu, M.; Bai, K.; Meng, L.; Yang, X.; Li, B.; Ma, Y. Assessing maize lodging severity using multitemporal uav-based digital images. Eur. J. Agron. 2023, 144, 126754. [Google Scholar] [CrossRef]
- Yu, T.; Zhou, J.; Fan, J.; Wang, Y.; Zhang, Z. Potato leaf area index estimation using multi-sensor unmanned aerial vehicle (uav) imagery and machine learning. Remote Sens. 2023, 15, 4108. [Google Scholar] [CrossRef]
- Sahoo, R.N.; Rejith, R.G.; Gakhar, S.; Ranjan, R.; Meena, M.C.; Dey, A.; Mukherjee, J.; Dhakar, R.; Meena, A.; Daas, A.; et al. Drone remote sensing of wheat n using hyperspectral sensor and machine learning. Precis. Agric. 2024, 25, 704–728. [Google Scholar] [CrossRef]
- Yin, C.; Lv, X.; Zhang, L.; Ma, L.; Wang, H.; Zhang, L.; Zhang, Z. Hyperspectral uav images at different altitudes for monitoring the leaf nitrogen content in cotton crops. Remote Sens. 2022, 14, 2576. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Xu, W.; Chen, P.; Zhan, Y.; Chen, S.; Zhang, L.; Lan, Y. Cotton yield estimation model based on machine learning using time series uav remote sensing data. Int. J. Appl. Earth Obs. 2021, 104, 102511. [Google Scholar] [CrossRef]
- Siegfried, J.; Adams, C.B.; Rajan, N.; Hague, S.; Schnell, R.; Hardin, R. Combining a cotton ‘boll area index’ with in-season unmanned aerial multispectral and thermal imagery for yield estimation. Field Crop. Res. 2023, 291, 108765. [Google Scholar] [CrossRef]
- Farella, M.M.; Fisher, J.B.; Jiao, W.; Key, K.B.; Barnes, M.L. Thermal remote sensing for plant ecology from leaf to globe. J. Ecol. 2022, 110, 1996–2014. [Google Scholar] [CrossRef]
- Zhen, S.; Kusuma, P.; Bugbee, B. Chapter 17-toward an optimal spectrum for photosynthesis and plant morphology in led-based crop cultivation. In Plant Factory Basics, Applications and Advances; Kozai, T., Niu, G., Masabni, J., Eds.; Academic Press: Cambridge, MA, USA, 2022; pp. 309–327. [Google Scholar]
- Chen, B.; Wang, K.; Li, S.; Wang, J.; Bai, J.; Xiao, C.; Lai, J. Spectrum Characteristics of Cotton Canopy Infected with Verticillium wilt and Inversion of Severity Level. Li, D., Ed.; Springer: Boston, MA, USA, 2008. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Disease Severity | Disease Index (DI) | Disease Division Standard |
|---|---|---|
| b0 (Health) | 0 | Healthy plants, no diseased leaves. |
| b1 (Slight) | 0 < DI ≤ 25% | Symptoms are visible on less than 1/4 of the leaves, with yellowish or yellow irregular lesions between the main veins of the leaf. |
| b2 (Moderate) | 25% < DI ≤ 50% | 1/4 to 1/2 of the leaves show symptoms, most of the spots are yellow or yellow–brown, the edge of the leaf blade is slightly curled withered. |
| b3 (Serious) | 50% < DI ≤ 75% | 1/2 to 3/4 of the leaves show disease, with a few leaves falling off. |
| b4 (Critical) | 75% < DI ≤ 100% | More than 3/4 leaf disease, mostly brown spots, cotton plant leaf shedding for light pole, or even death. |
| Disease Severity | B0 | B1 | B2 | B3 | B4 |
|---|---|---|---|---|---|
| Number of samples | 11 | 21 | 20 | 68 | 30 |
| Proportion | 7.33% | 14% | 13.34% | 45.33% | 20% |
| Vegetation Index | Formula | References |
|---|---|---|
| Ratio vegetation index (RVI) | [25] | |
| Renormalized difference Vegetation index (RDVI) | [26] | |
| Green normalized difference vegetation index (GNDVI) | [27] | |
| Red edge normalized difference vegetation index (RENDVI) | [28] | |
| Difference vegetation index (DVI) | [29] | |
| Soil adjusted vegetation index (SAVI) | [30] | |
| Optimized soil adjusted vegetation index (OSAVI) | [31] | |
| Modified soil adjusted vegetation index (MSAVI) | [32] | |
| Enhanced vegetation index(EVI) | [33] | |
| Normalized difference water index (NDWI) | [34] |
| Volume of Liquid Applied L/hm2 | Altitude m | Flight Speed m/s |
|---|---|---|
| 1–1.5 | 1.5–4 | 3.5–5.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Liang, Z.; Yang, G.; Lin, T.; Liu, B. Assessing the Severity of Verticillium Wilt in Cotton Fields and Constructing Pesticide Application Prescription Maps Using Unmanned Aerial Vehicle (UAV) Multispectral Images. Drones 2024, 8, 176. https://doi.org/10.3390/drones8050176
Li X, Liang Z, Yang G, Lin T, Liu B. Assessing the Severity of Verticillium Wilt in Cotton Fields and Constructing Pesticide Application Prescription Maps Using Unmanned Aerial Vehicle (UAV) Multispectral Images. Drones. 2024; 8(5):176. https://doi.org/10.3390/drones8050176
Chicago/Turabian StyleLi, Xiaojuan, Zhi Liang, Guang Yang, Tao Lin, and Bo Liu. 2024. "Assessing the Severity of Verticillium Wilt in Cotton Fields and Constructing Pesticide Application Prescription Maps Using Unmanned Aerial Vehicle (UAV) Multispectral Images" Drones 8, no. 5: 176. https://doi.org/10.3390/drones8050176
APA StyleLi, X., Liang, Z., Yang, G., Lin, T., & Liu, B. (2024). Assessing the Severity of Verticillium Wilt in Cotton Fields and Constructing Pesticide Application Prescription Maps Using Unmanned Aerial Vehicle (UAV) Multispectral Images. Drones, 8(5), 176. https://doi.org/10.3390/drones8050176