


Adaptive Terminal Time and Impact Angle Constraint Cooperative Guidance Strategy for Multiple Vehicles


Abstract
1. Introduction
- A flexible final time formulation based on the MPSP algorithm is given. This method can prevent the non-convergence caused by a fixed convergence time. Moreover, it can minimize the deviation from the initial set terminal time, while ensuring the constraints are met, as well as maintaining the continuity of the control inputs to achieve energy optimization.
- By establishing a nonlinear system model, the trajectory prediction of the aircraft and the movement trajectory of the target are integrated into a holistic navigation model. Different end point angles are designed for different targets. Matching can be performed automatically to optimize energy and maximize the effect.
- The guidance strategy facilitates the convergence of vehicles, varying in number and initial positions, to satisfy impact angle constraints at a designated arrival time within three-dimensional space. The strategy framework is well structured and has the potential for online deployment.
2. Problem Statement
2.1. Dynamic Equations of the Target
- Targets with stationary positionwhere , , .
- Targets with line movementswhere , , ,, , .
- Targets with curve movementswhere , , ,, , ,, , .
2.2. Guidance Problem Formulation
2.3. Parameter Normalization
3. Design of Improved MPSP Algorithms with Adaptive Terminal Time
4. Cooperative Guidance Strategy Implementation
4.1. Guess History Selection
4.2. Strike Mode Design
- For three vehicles, the terminal constraint angles are taken as
- For four vehicles, the terminal constraint angles are taken as
- For five vehicles, the terminal constraint angles are taken as
4.3. Implementation of the Guidance Strategy
- Consider the mission characteristics of the multiple vehicles and set the ideal constraint angle , is determined autonomously by the motion of the target.
- Estimation of the flight time of each vehicle following APN guidance law, taking into account the effects of initial position and velocity perturbations. Choose the longest time of them as the initial terminal time for the MPSP algorithm.
- Take the vehicle with the longest flight time and substitute the flight angle constraints, the improved MPSP algorithm is utilized to find the terminal time that satisfies the constraints.
- Finally, for the case of multiple vehicles flying in a coordinated manner, the coordinated time is chosen to be .
- The initial conditions and constraint angles of all the vehicles are used to finalize the synergy time and the MPSP algorithm is utilized to obtain the required amount of control. This ensures that all the vehicles are able to meet the specified constraints and accomplish the cooperative flight mission.
5. Numerical Simulation and Analysis
5.1. Case 1: Stationary Target (Three Vehicles)
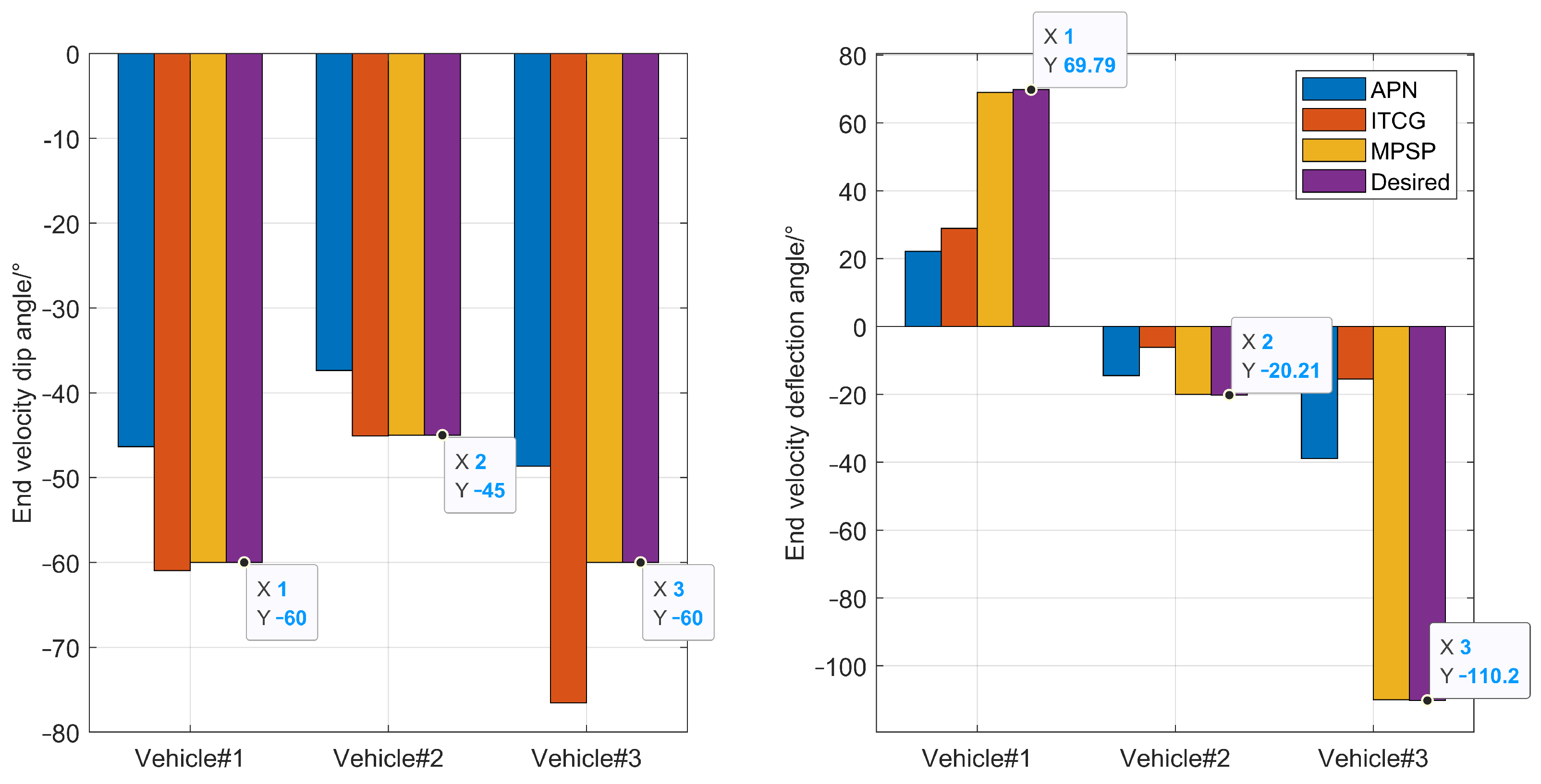
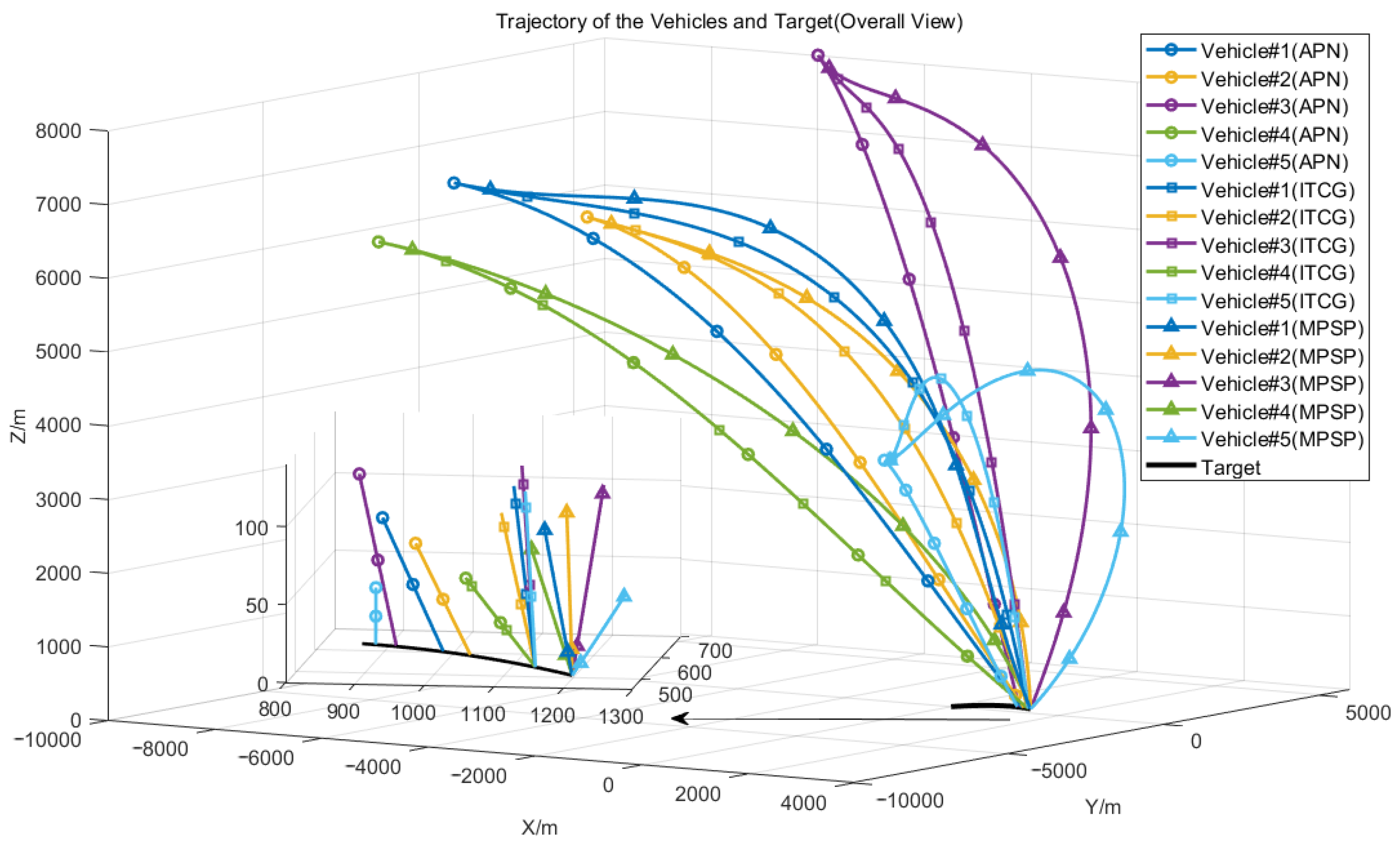
5.2. Case 2: Maneuvering Target (Three Vehicles)
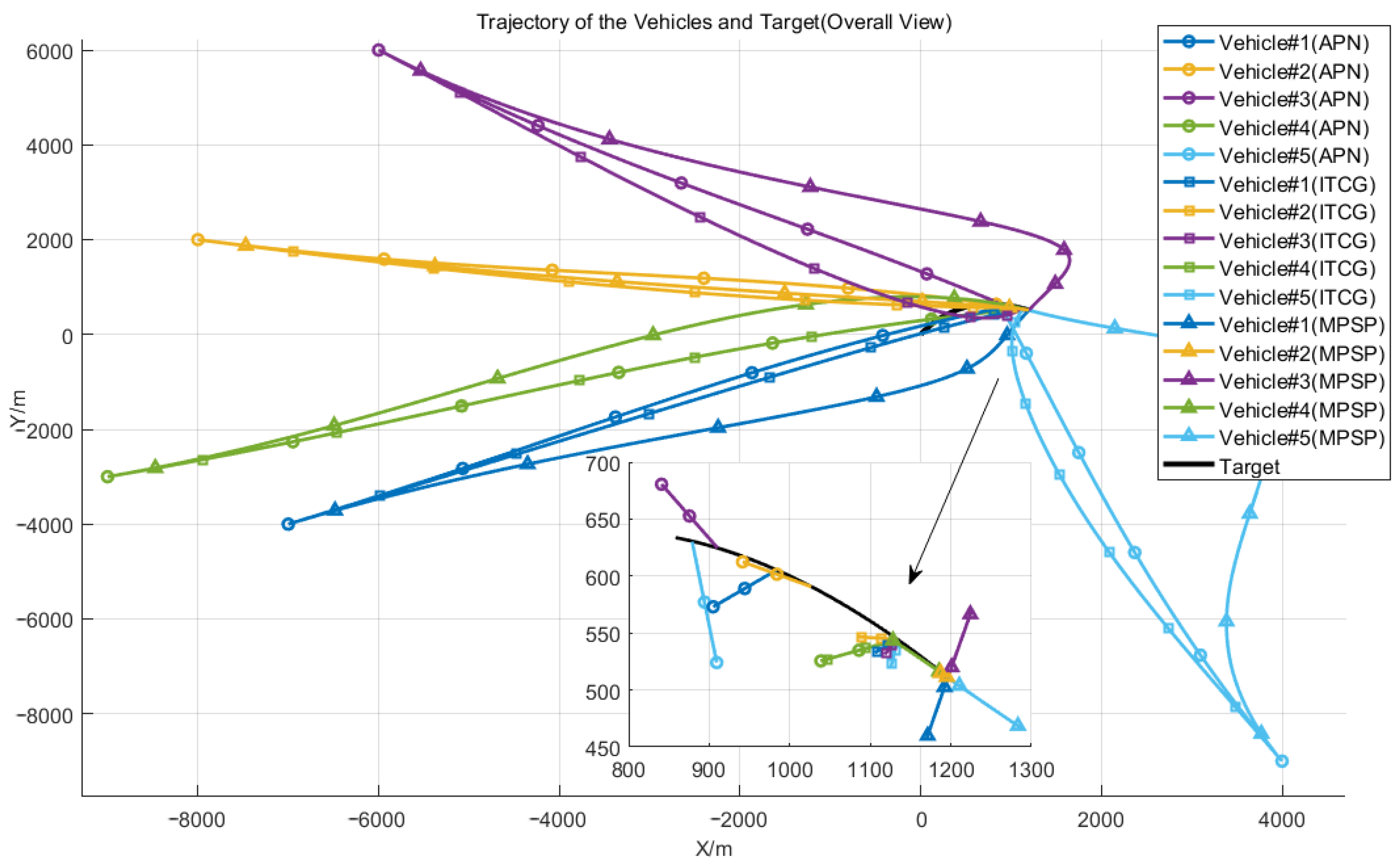
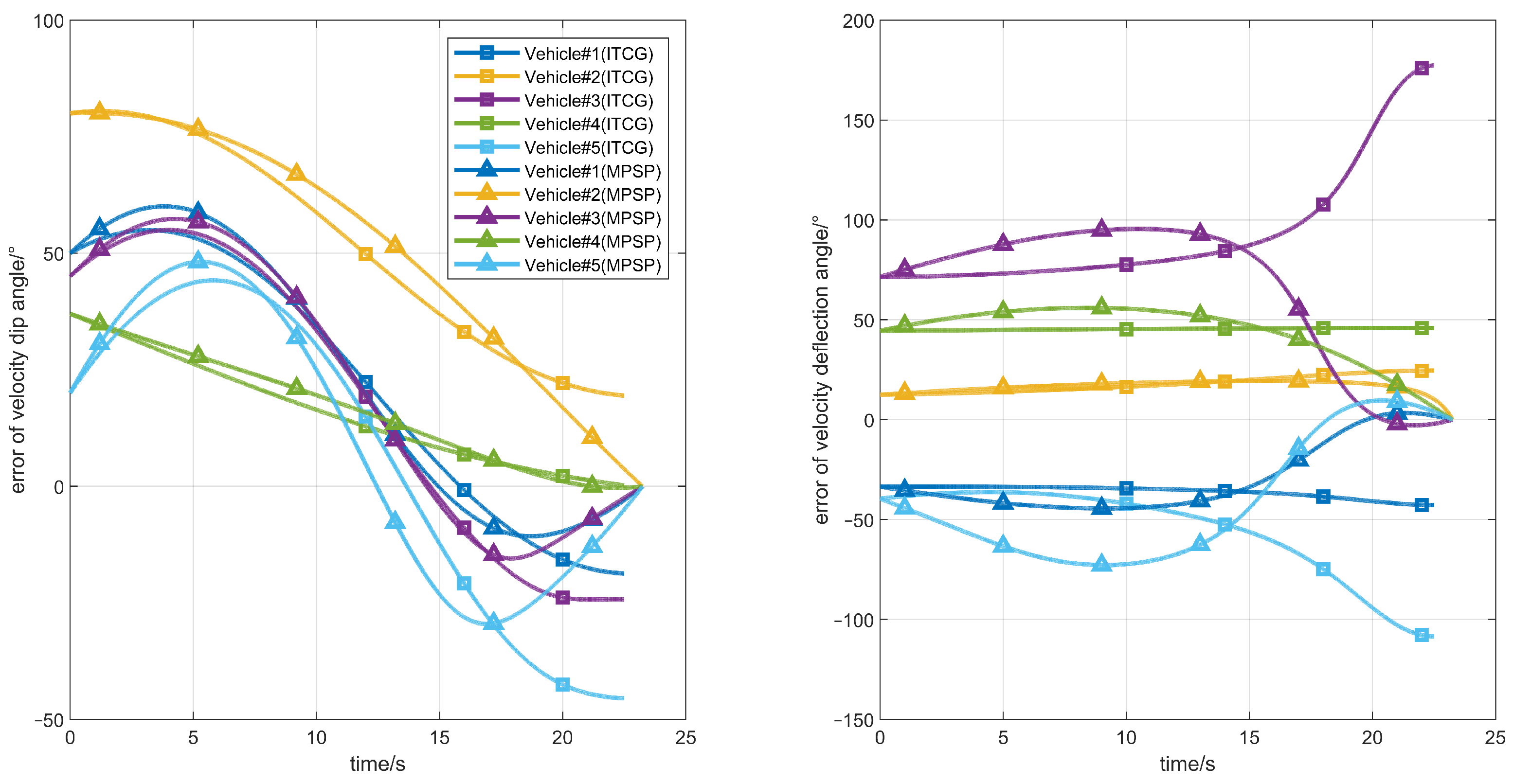
5.3. Case 3: Maneuvering Target (Five Vehicles)
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Guidance Method | Vehicle 1 | Vehicle 2 | Vehicle 3 | |
|---|---|---|---|---|
| Flight Time/s | APN | 18.169 | 19.116 | 18.273 |
| ITCG | 19.116 | 19.116 | 19.116 | |
| MPSP | 19.116 | 19.116 | 19.116 | |
| End /deg | Constraint | −45 | −45 | −45 |
| APN | −51.19 | −44.69 | −54.39 | |
| ITCG | −69.00 | −50.20 | −70.51 | |
| MPSP | −45.00 | −45.00 | −45.00 | |
| End /deg | Constraint | 90 | 90 | 90 |
| APN | 29.64 | −14.03 | −44.97 | |
| ITCG | 29.30 | −14.03 | −44.96 | |
| MPSP | 90.00 | 0.00 | −90.00 | |
| Off−target range/m | APN | 0.8012 | 0.6987 | 0.4515 |
| ITCG | 0.2095 | 0.2511 | 0.2746 | |
| MPSP | 0.2210 | 0.2701 | 0.2491 |
| Guidance Method | Vehicle 1 | Vehicle 2 | Vehicle 3 | |
|---|---|---|---|---|
| Flight Time/s | APN | 19.727 | 20.450 | 18.487 |
| ITCG | 20.450 | 20.450 | 20.450 | |
| MPSP | 21.451 | 21.451 | 21.451 | |
| End /deg | Constraint | −60 | −45 | −60 |
| APN | −46.35 | −37.36 | −48.66 | |
| ITCG | −60.94 | −45.09 | −76.55 | |
| MPSP | −60 | −45 | −60 | |
| End /deg | Constraint | 69.79 | −20.21 | −110.21 |
| APN | 22.18 | −14.47 | −38.89 | |
| ITCG | 28.88 | −6.092 | −15.47 | |
| MPSP | 69.79 | −20.21 | −110.21 | |
| Off-target range/m | APN | 0.5535 | 0.5735 | 0.3968 |
| ITCG | 0.3925 | 0.1765 | 0.6155 | |
| MPSP | 0.1097 | 0.0761 | 0.1236 |
| Guidance Method | Vehicle 1 | Vehicle 2 | Vehicle 3 | Vehicle 4 | Vehicle 5 | |
|---|---|---|---|---|---|---|
| Flight Time/s | APN | 19.727 | 20.450 | 18.487 | 22.188 | 17.942 |
| ITCG | 22.188 | 22.188 | 22.188 | 22.188 | 22.188 | |
| MPSP | 23.187 | 23.187 | 23.187 | 23.187 | 23.187 | |
| End /deg | Constraint | −60 | −85 | −60 | −45 | −30 |
| APN | −46.35 | −37.36 | −48.66 | −31.03 | −24.87 | |
| ITCG | −75.83 | −63.33 | −81.11 | −31.03 | 78.12 | |
| MPSP | −60 | −84.99 | −60.00 | −44.99 | −30.00 | |
| End /deg | Constraintt | 63.55 | −26.45 | −116.45 | −26.45 | 153.55 |
| APN | 22.18 | −14.47 | −38.89 | 11.07 | 106.05 | |
| ITCG | 22.41 | −2.57 | −42.18 | 11.07 | 70.20 | |
| MPSP | 63.55 | −26.46 | −116.46 | −26.45 | 153.55 | |
| off-target range/m | APN | 0.5535 | 0.5735 | 0.3968 | 0.5060 | 0.4810 |
| ITCG | 0.4603 | 0.5999 | 0.8824 | 1.0681 | 0.7159 | |
| MPSP | 0.686 | 0.1166 | 0.1878 | 0.0756 | 0.1318 |
References
- Hou, Z.; Lei, T. Constrained model free adaptive predictive perimeter control and route guidance for multi-region urban traffic systems. IEEE Trans. Intell. Transp. Syst. 2020, 23, 912–924. [Google Scholar] [CrossRef]
- Gao, Y.; Wang, D.; Wei, W.; Yu, Q.; Liu, X.; Wei, Y. Constrained Predictive Tracking Control for Unmanned Hexapod Robot with Tripod Gait. Drones 2022, 6, 246. [Google Scholar] [CrossRef]
- Rout, R.; Subudhi, B. Design of line-of-sight guidance law and a constrained optimal controller for an autonomous underwater vehicle. IEEE Trans. Circuits Syst. II Express Briefs 2020, 68, 416–420. [Google Scholar] [CrossRef]
- Hou, Z.; Yang, Y.; Liu, L.; Wang, Y. Terminal sliding mode control based impact time and angle constrained guidance. Aerosp. Sci. Technol. 2019, 93, 105142. [Google Scholar] [CrossRef]
- You, H.; Chang, X.; Zhao, J.; Wang, S.; Zhang, Y. Three-dimensional impact-angle-constrained cooperative guidance strategy against maneuvering target. ISA Trans. 2023, 138, 262–280. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Luo, S.; Liu, H. Integrated Design of Multi-Constrained Snake Maneuver Surge Guidance Control for Hypersonic Vehicles in the Dive Segment. Aerospace 2023, 10, 765. [Google Scholar] [CrossRef]
- Shi, P.; Guan, S.; Cheng, L.; Li, W.; Huang, X. Real-time Multi-Constrained Polynomial Guidance Based on Analytical Gradient Derivation. IEEE Trans. Aerosp. Electron. Syst. 2023. early access. [Google Scholar]
- Xiao, B.; Wu, X.; Cao, L.; Hu, X. Prescribed Time Attitude Tracking Control of Spacecraft With Arbitrary Disturbance. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2531–2540. [Google Scholar] [CrossRef]
- Ye, Q.; Liu, C.; Sun, J. A backstepping-based guidance law for an exoatmospheric missile with impact angle constraint. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 547–561. [Google Scholar] [CrossRef]
- Yan, X.; Zhu, J.; Kuang, M.; Yuan, X. A computational-geometry-based 3-dimensional guidance law to control impact time and angle. Aerosp. Sci. Technol. 2020, 98, 105672. [Google Scholar] [CrossRef]
- Jiang, S.; Tian, F.q.; Sun, S.y.; Liang, W.g. Integrated guidance and control of guided projectile with multiple constraints based on fuzzy adaptive and dynamic surface. Def. Technol. 2020, 16, 1130–1141. [Google Scholar] [CrossRef]
- Kim, H.G.; Lee, J.Y.; Kim, H.J.; Kwon, H.H.; Park, J.S. Look-angle-shaping guidance law for impact angle and time control with field-of-view constraint. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 1602–1612. [Google Scholar] [CrossRef]
- Lin, M.; Ding, X.; Wang, C.; Liang, L.; Wang, J. Three-dimensional fixed-time cooperative guidance law with impact angle constraint and prespecified impact time. IEEE Access 2021, 9, 29755–29763. [Google Scholar] [CrossRef]
- Yang, X.; Song, S. Three-dimensional consensus algorithm for nonsingular distributed cooperative guidance strategy. Aerosp. Sci. Technol. 2021, 118, 106958. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, Y.; Liu, Z.; Wang, S.; Hu, X. Finite-time cooperative guidance strategy for impact angle and time control. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 806–819. [Google Scholar] [CrossRef]
- Wang, J.; Ding, X.; Wang, C.; Xia, K.; Xin, M. Look angle tracking based three-dimensional impact time control guidance law with field-of-view constraint. Int. J. Robust Nonlinear Control. 2023, 33, 9951–9968. [Google Scholar] [CrossRef]
- Padhi, R. Model predictive static programming: A promising technique for optimal missile guidance. Ann. Indian Natl. Acad. Eng. 2008, 5, 186–194. [Google Scholar]
- Li, Y.; Zhou, H.; Chen, W. Three-dimensional impact time and angle control guidance based on MPSP. Int. J. Aerosp. Eng. 2019, 2019, 5631723. [Google Scholar] [CrossRef]
- Maity, A.; Padhi, R.; Mallaram, S.; Rao, G.M.; Manickavasagam, M. A robust and high precision optimal explicit guidance scheme for solid motor propelled launch vehicles with thrust and drag uncertainty. Int. J. Syst. Sci. 2016, 47, 3078–3097. [Google Scholar] [CrossRef]
- Zha, Y.; Guo, J.; Zheng, H.; Kang, H.; Yu, L. Improved MPSP Guidance Law Design for Achieving Expected Attack Time. In Proceedings of the 2020 International Symposium on Autonomous Systems (ISAS), Guangzhou, China, 6–8 December 2020; pp. 29–34. [Google Scholar]
- Duvvuru, R.; Maity, A.; Umakant, J. Three-dimensional field of view and impact angle constrained guidance with terminal speed maximization. Aerosp. Sci. Technol. 2022, 126, 107552. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, X.; Lin, H. A cooperative guidance law with constraints of impact time and impact angle. J. Ballist. 2017, 29, 1–8. [Google Scholar]





| Vehicle1 | Vehicle2 | Vehicle3 | Vehicle4 | Vehicle5 | |
|---|---|---|---|---|---|
| Position (x,y,z) (km) | (−7,−4,7) | (−8,2,6) | (−6,6,8) | (−9,−3,6) | (4,−9,4) |
| V (m/s) | 600 | 550 | 650 | 570 | 630 |
| (deg) | −10 | −5 | −15 | −8 | −10 |
| (deg) | 30 | −14 | −45 | 18 | 114 |
| Mission Type | Pursuit | Pursuit | Pursuit | Pursuit | Intercept |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, A.; Hu, X.; Yang, S.; Dong, K. Adaptive Terminal Time and Impact Angle Constraint Cooperative Guidance Strategy for Multiple Vehicles. Drones 2024, 8, 134. https://doi.org/10.3390/drones8040134
Li A, Hu X, Yang S, Dong K. Adaptive Terminal Time and Impact Angle Constraint Cooperative Guidance Strategy for Multiple Vehicles. Drones. 2024; 8(4):134. https://doi.org/10.3390/drones8040134
Chicago/Turabian StyleLi, Ao, Xiaoxiang Hu, Shaohua Yang, and Kejun Dong. 2024. "Adaptive Terminal Time and Impact Angle Constraint Cooperative Guidance Strategy for Multiple Vehicles" Drones 8, no. 4: 134. https://doi.org/10.3390/drones8040134
APA StyleLi, A., Hu, X., Yang, S., & Dong, K. (2024). Adaptive Terminal Time and Impact Angle Constraint Cooperative Guidance Strategy for Multiple Vehicles. Drones, 8(4), 134. https://doi.org/10.3390/drones8040134