
Multi-Phase Trajectory Planning for Wind Energy Harvesting in Air-Launched UAV Swarm Rendezvous and Formation Flight



Abstract
1. Introduction
2. Problem Formulation
2.1. Mission Scenario
2.2. Wind and UAV Model
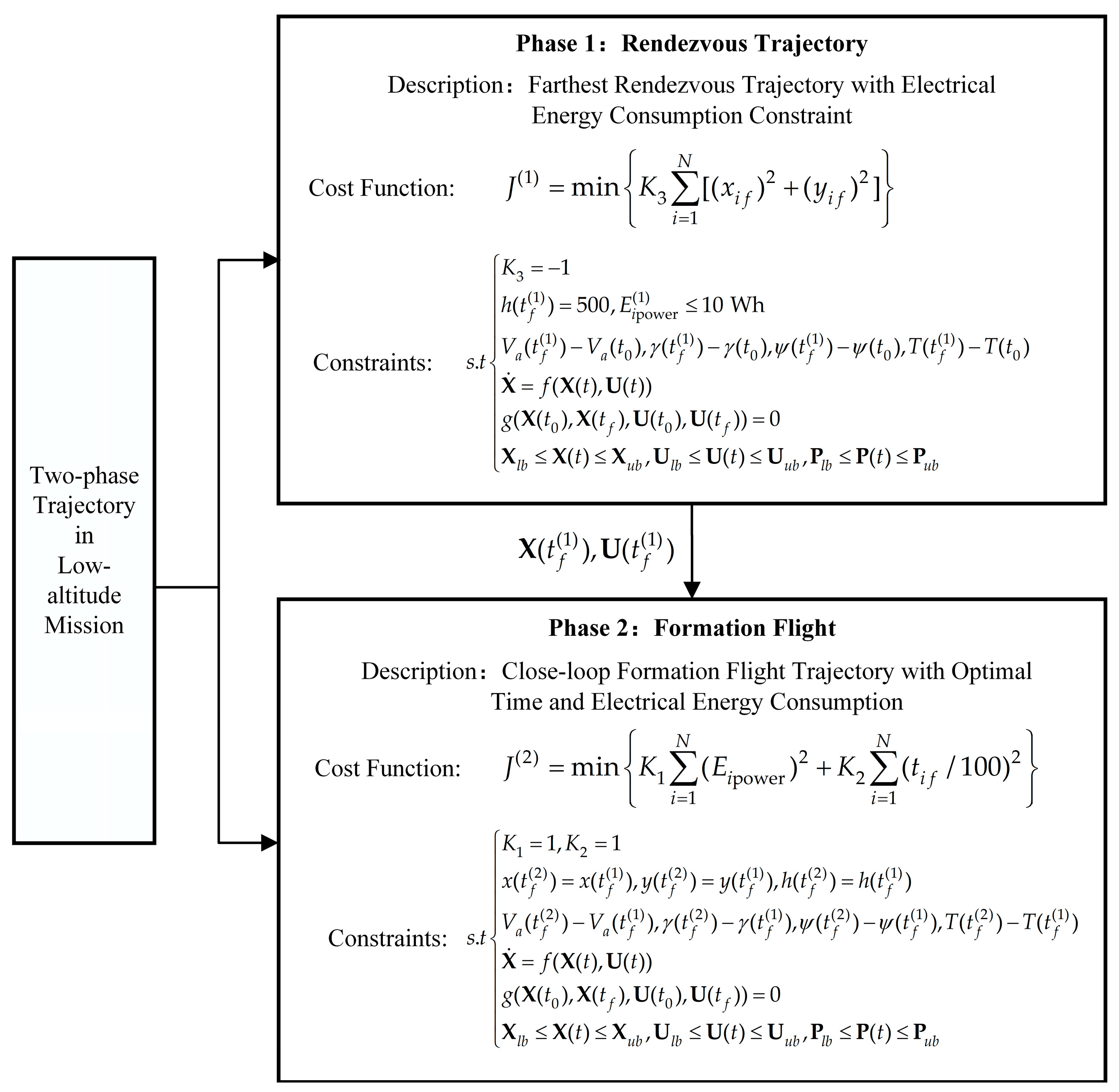
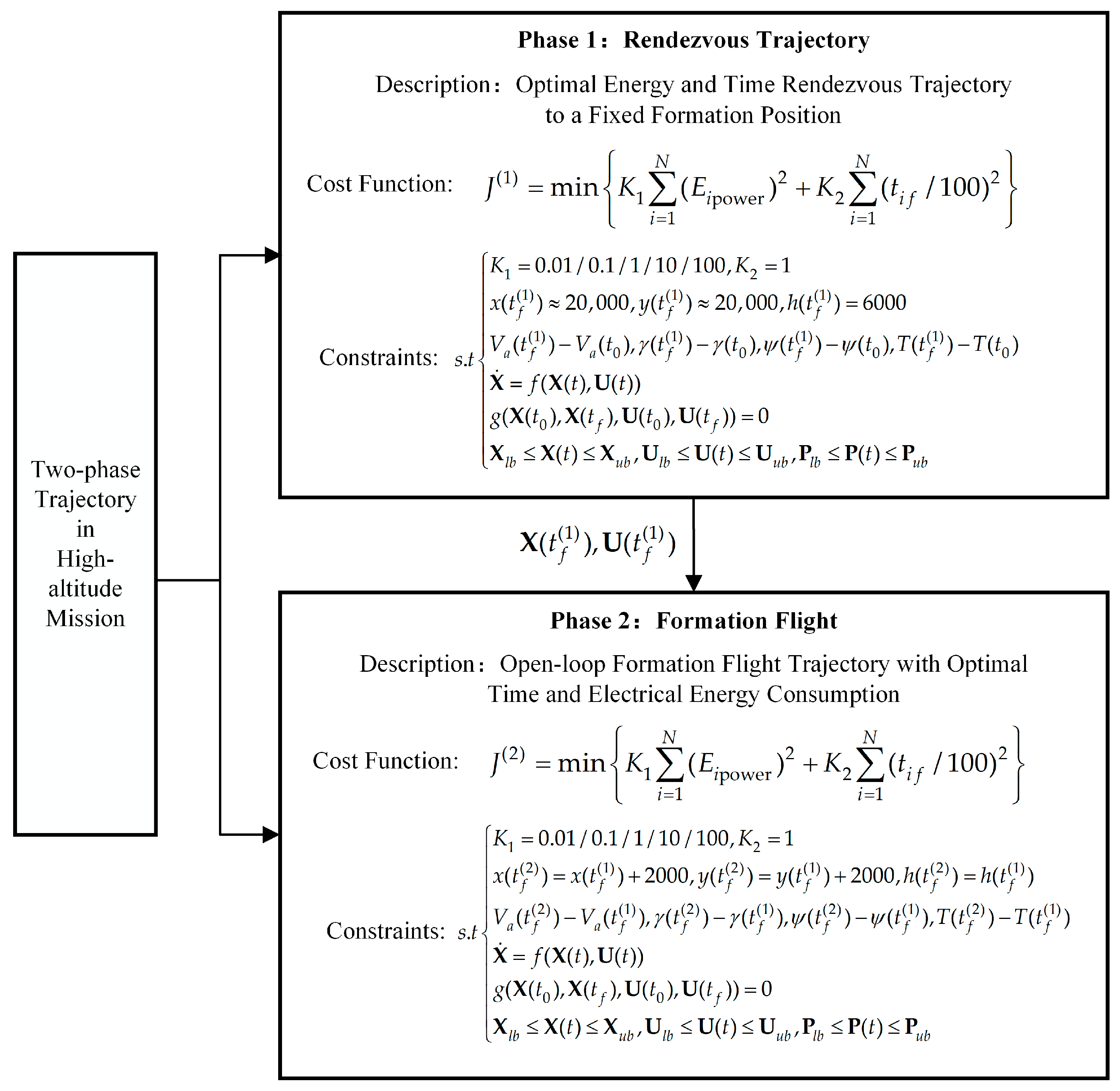
2.3. Optimal Control Model for the Multi-Phase Trajectory
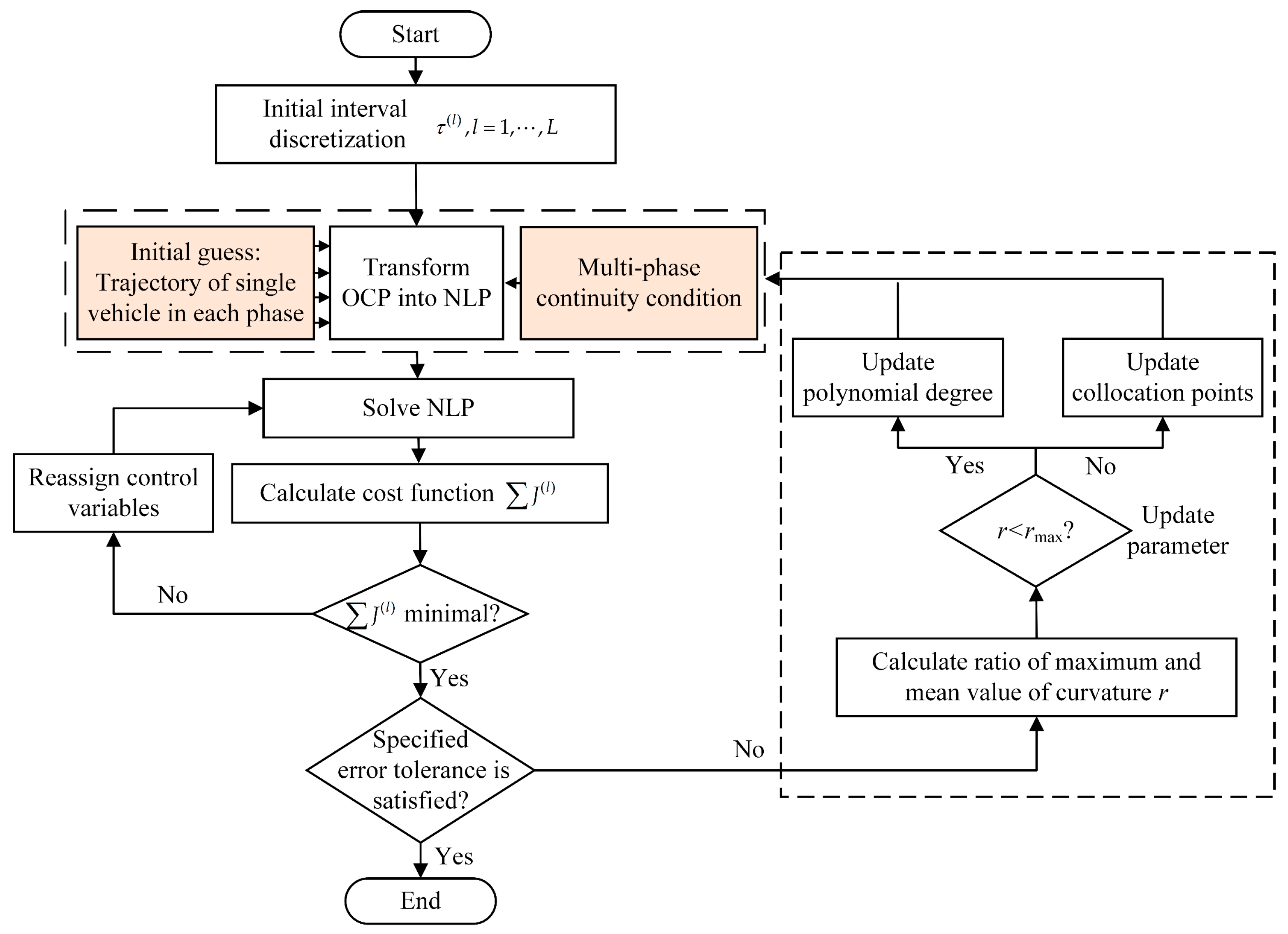
3. The Transformation Process of the Hp-Adaptive Pseudo-Spectral Method
- 1.
- Interval discretization
- 2.
- State and control variables discretization
- 3.
- Kinematic model discretization
- 4.
- Cost function discretization
- 5.
- Boundary and path constraints discretization
| Algorithm 1 Rendezvous Trajectory Planning Process |
| Input: , , , , , , Output: , , 1: initialize , , ; 2: for do 3: Calculate , , , , and form the nonlinear programming ; 4: Solve to obtain and ; 5: Calculate ; 6: if then 7: , , and ; 8: break; 9: else 10: Calculate , , and ; 11: if then 12: Obtain by hp-adaptive LGR, , by interpolate; 13: end if 14: end if 15: end for |
4. Simulation and Analysis
4.1. Low-Altitude Mission Scenario
4.1.1. Optimal Control Model of Low-Altitude Mission
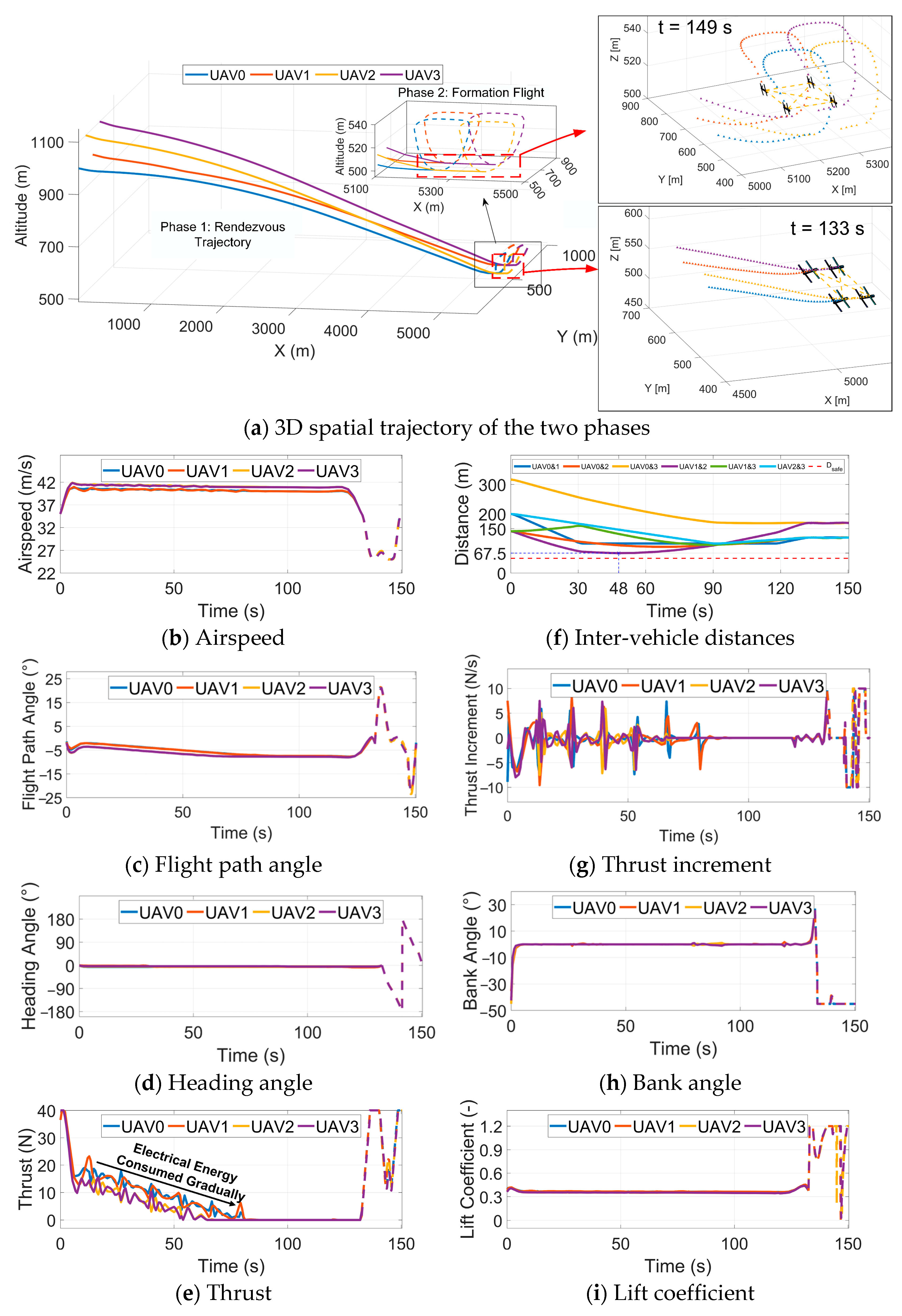
4.1.2. Swarm Trajectory of Low-Altitude Mission
4.2. High-Altitude Mission Scenario
4.2.1. Optimal Control Model of High-Altitude Mission
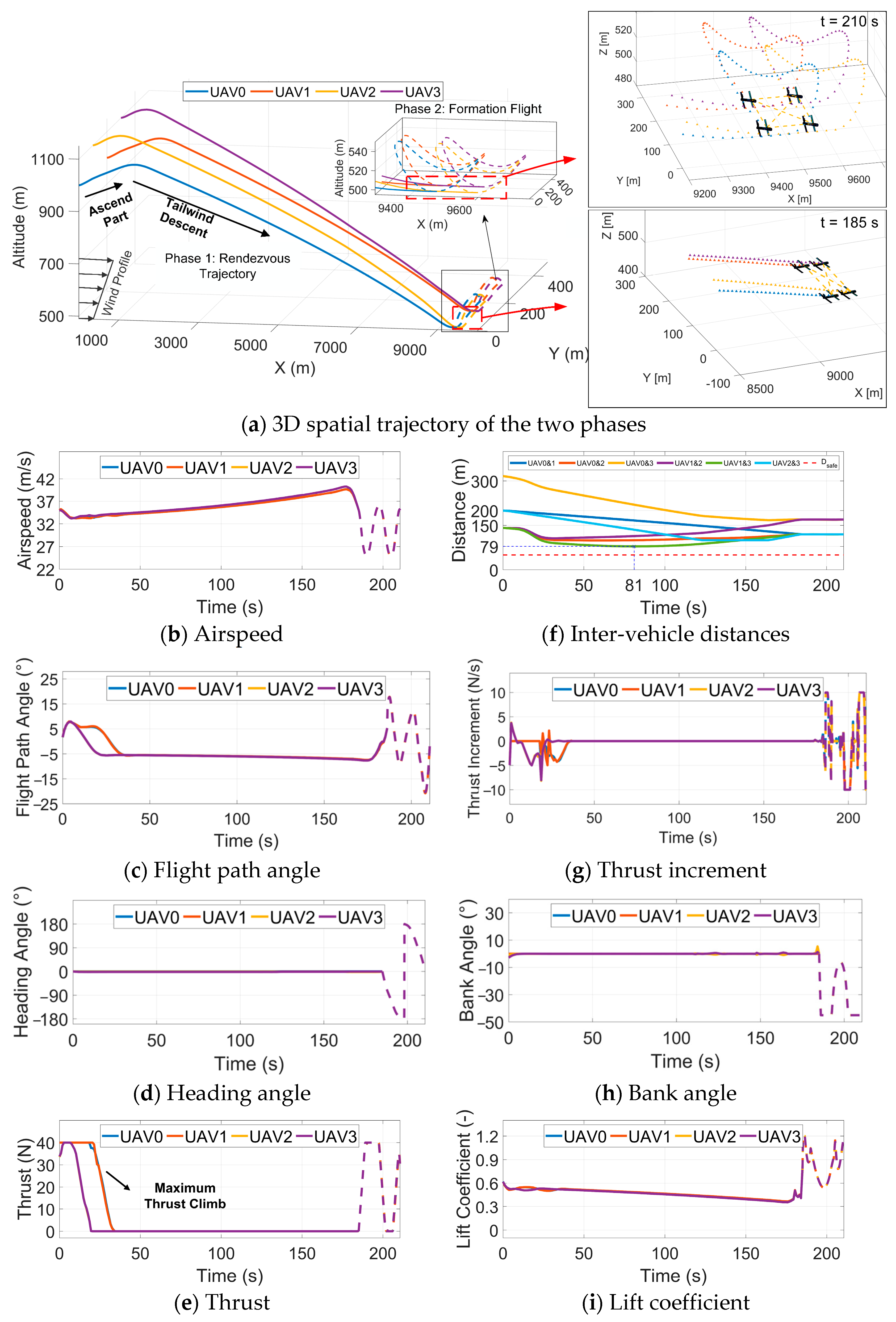
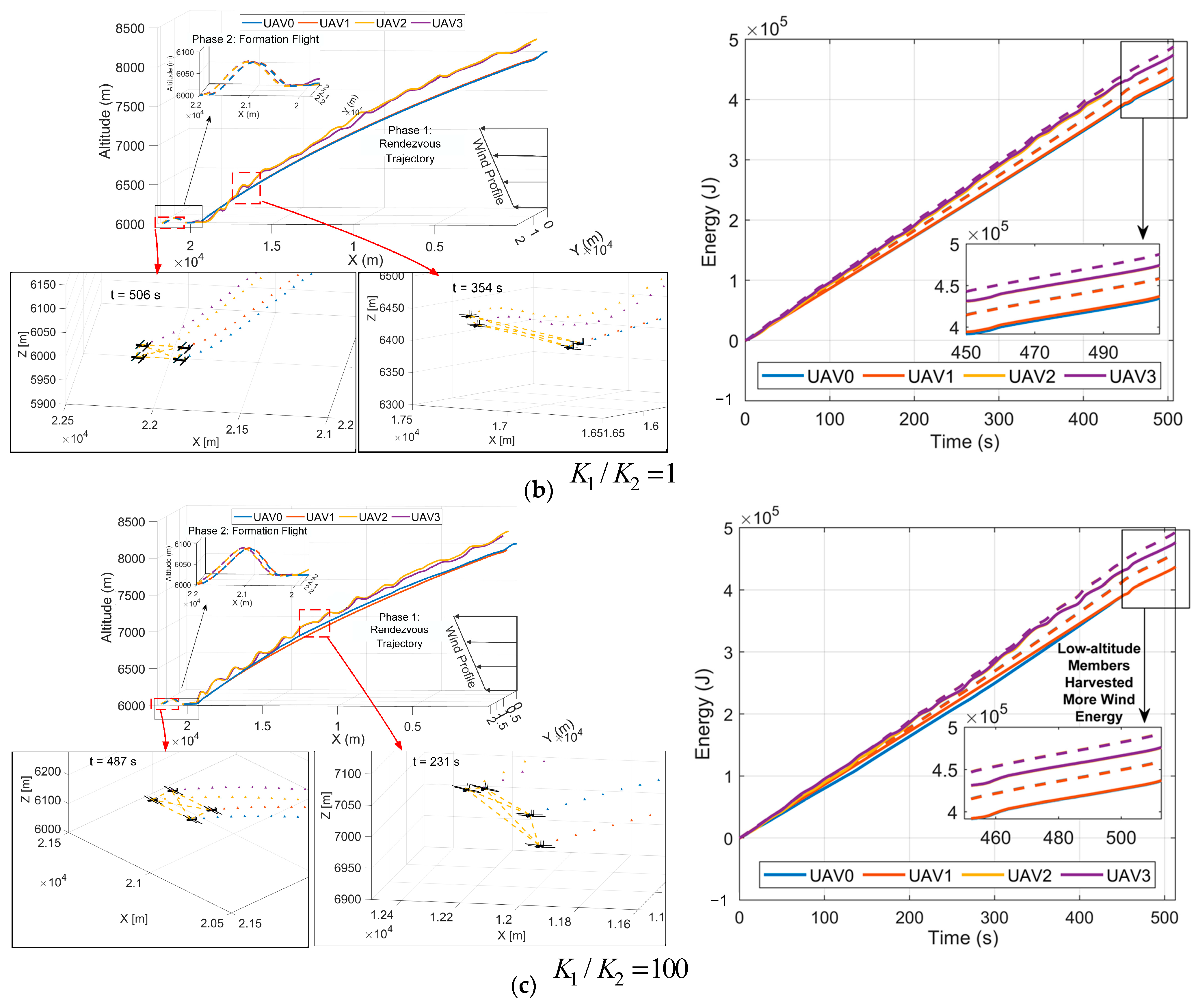
4.2.2. Swarm Trajectory of High-Altitude Mission
5. Conclusions
- (1)
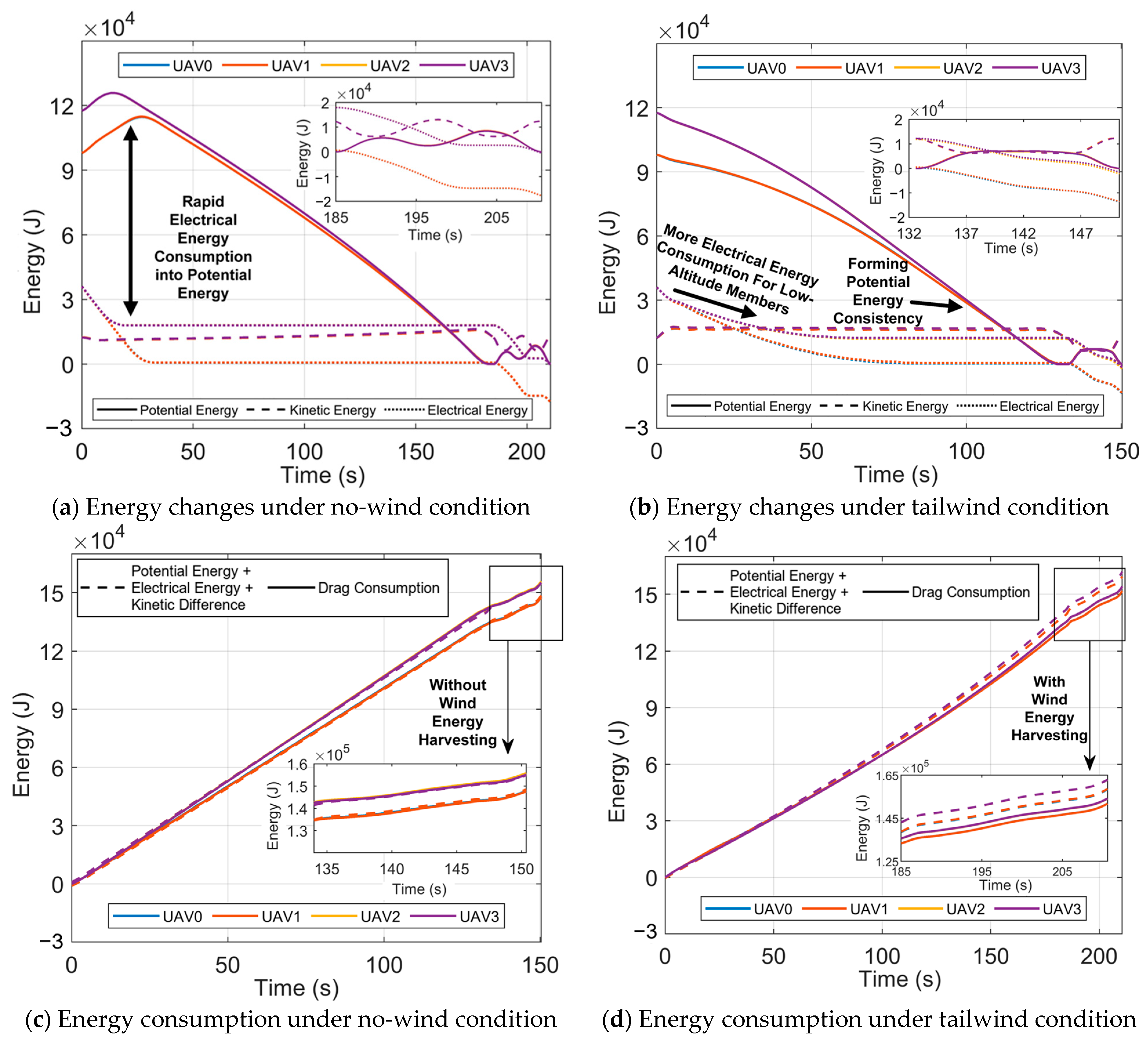
- Harvesting wind energy can significantly enhance the endurance and range of air-launched swarm rendezvous and formation flight. Under favorable wind conditions, the farthest formation distance of the swarm can expand by over 50% under the same electrical energy consumption constraints, substantially reducing the average power required for the rendezvous trajectory. The range extension of air-launched swarms is significantly influenced by the duration constraints when employing wind energy harvesting strategies. The flexibility to adjust the cost function weights based on the specific requirements of a mission and its environment ensures the optimal deployment and utilization of the air-launch UAV swarms in wind conditions.
- (2)
- Utilizing thrust as a state variable and thrust increment as a control variable enhances the continuity of thrust inputs and guarantees the feasibility of trajectory planning. All trajectories satisfy the constraints of the variables, boundary conditions, paths, and multi-phase connections. Simulation results demonstrate significant energy savings in both low- and high-altitude mission scenarios. Efficient wind energy utilization can double the maximum formation rendezvous distance and even allow for rendezvous without electrical power consumption when the phase durations are extended reasonably. The subsequent formation flight phase exhibits a maximum endurance increase of 58%.
- (3)
- This paper explores a more comprehensive utilization of the potential, kinetic, electrical, and wind energies for the rendezvous and formation missions of UAV swarms. By optimizing trajectory planning for swarm rendezvous and formation flight, this approach significantly reduces electrical energy consumption during these critical phases of the mission. This reduction in energy use directly contributes to extending the range and endurance of the UAVs, thereby enhancing the operational capabilities of the swarm in subsequent mission phases.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sheng, H.; Zhang, J.; Yan, Z.; Yin, B.; Liu, S.; Bai, T.; Wang, D. New Multi-UAV Formation Keeping Method Based on Improved Artificial Potential Field. Chin. J. Aeronaut. 2023, 36, 249–270. [Google Scholar] [CrossRef]
- Han, T.; Tang, A.; Zhou, H.; Xu, D.; Xie, L. Multiple UAV Cooperative Path Planning Based on LASSA Method. Syst. Eng. Electron. 2022, 44, 233–241. [Google Scholar] [CrossRef]
- Liang, H.J.; Cui, T.; Ma, J.J. Research on the Development Status and Trend of Typical Unmanned Air Attack Weapon. Ship Electron. Eng. 2021, 41, 9–13. [Google Scholar]
- Lu, Y.F.; Chen, Q.Y.; Wang, P.; Wang, B.; Guo, Z. Design and Experiment of a Small Air-Launched UAV. Acta Aeronaut. Astronaut. Sin. 2023, 44, 322–332. [Google Scholar] [CrossRef]
- Fu, X.; Cui, H.; Gao, X. Distributed Solving Method of Multi-UAV Rendezvous Problem. Syst. Eng. Electron. 2015, 37, 1797–1802. [Google Scholar]
- Cheng, Z.; Zhao, L.; Shi, Z. Decentralized Multi-UAV Path Planning Based on Two-Layer Coordinative Framework for Formation Rendezvous. IEEE Access 2022, 10, 45695–45708. [Google Scholar] [CrossRef]
- Chang, J.; Laliberté, J. Trajectory Optimization for Dynamic Soaring Remotely Piloted Aircraft with Under-Wing Solar Panels. J. Aircr. 2023, 60, 581–588. [Google Scholar] [CrossRef]
- Kempton, J.A.; Wynn, J.; Bond, S.; Evry, J.; Fayet, A.L.; Gillies, N.; Guilford, T.; Kavelaars, M.; Juarez-Martinez, I.; Padget, O.; et al. Optimization of Dynamic Soaring in a Flap-Gliding Seabird Affects Its Large-Scale Distribution at Sea. Sci. Adv. 2022, 8, eabo0200. [Google Scholar] [CrossRef]
- Sachs, G.; Grüter, B. Trajectory Optimization and Analytic Solutions for High-Speed Dynamic Soaring. Aerospace 2020, 7, 47. [Google Scholar] [CrossRef]
- Idrac, P. Experimental Study of the “Soaring” of Albatrosses. Nature 1925, 115, 532. [Google Scholar] [CrossRef]
- Hong, H.; Grüter, B.; Piprek, P.; Holzapfel, F. Smooth Free-Cycle Dynamic Soaring in Unspecified Shear Wind via Quadratic Programming. Chin. J. Aeronaut. 2022, 35, 19–29. [Google Scholar] [CrossRef]
- Sachs, G.; Traugott, J.; Nesterova, A.P.; Dell’Omo, G.; Kümmeth, F.; Heidrich, W.; Vyssotski, A.L.; Bonadonna, F. Flying at No Mechanical Energy Cost: Disclosing the Secret of Wandering Albatrosses. PLoS ONE 2012, 7, e41449. [Google Scholar] [CrossRef] [PubMed]
- Bencatel, R.; Kabamba, P.; Girard, A. Perpetual Dynamic Soaring in Linear Wind Shear. J. Guid. Control Dyn. 2014, 37, 1712–1716. [Google Scholar] [CrossRef]
- Wang, W.; An, W.; Song, B. Modeling and Application of Dynamic Soaring by Unmanned Aerial Vehicle. Appl. Sci. 2022, 12, 5411. [Google Scholar] [CrossRef]
- Mir, I.; Maqsood, A.; Eisa, S.A.; Taha, H.; Akhtar, S. Optimal Morphing—Augmented Dynamic Soaring Maneuvers for Unmanned Air Vehicle Capable of Span and Sweep Morphologies. Aerosp. Sci. Technol. 2018, 79, 17–36. [Google Scholar] [CrossRef]
- Wang, W.; An, W.; Song, B. Dynamic Soaring Parameters Influence Regularity Analysis on UAV and Soaring Strategy Design. Drones 2023, 7, 271. [Google Scholar] [CrossRef]
- Fan, W.; Liu, Y.; Chappell, A.; Dong, L.; Xu, R.; Ekström, M.; Fu, T.-M.; Zeng, Z. Evaluation of Global Reanalysis Land Surface Wind Speed Trends to Support Wind Energy Development Using in Situ Observations. J. Appl. Meteorol. Climatol. 2021, 60, 33–50. [Google Scholar] [CrossRef]
- Deittert, M.; Richards, A.; Toomer, C.A.; Pipe, A. Engineless Unmanned Aerial Vehicle Propulsion by Dynamic Soaring. J. Guid. Control Dyn. 2009, 32, 1446–1457. [Google Scholar] [CrossRef]
- Sachs, G.; Grüter, B. Optimization of Thrust-Augmented Dynamic Soaring. J. Optim. Theory Appl. 2022, 192, 960–978. [Google Scholar] [CrossRef]
- Zhao, Y.J.; Qi, Y.C. Minimum Fuel Powered Dynamic Soaring of Unmanned Aerial Vehicles Utilizing Wind Gradients. Optim. Control. Appl. Methods 2004, 25, 211–233. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on Computational-Intelligence-Based UAV Path Planning. Knowl.-Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, C.; Wang, Y.; Zhang, T.; Gong, Y. A Fast Formation Obstacle Avoidance Algorithm for Clustered UAVs Based on Artificial Potential Field. Aerosp. Sci. Technol. 2024, 147, 108974. [Google Scholar] [CrossRef]
- Li, X.; Wang, L.; Wang, H.; Tao, L.; Wang, X. A Warm-Started Trajectory Planner for Fixed-Wing Unmanned Aerial Vehicle Formation. Appl. Math. Model. 2023, 122, 200–219. [Google Scholar] [CrossRef]
- Xie, J.; Carrillo, L.R.G.; Jin, L. Path Planning for UAV to Cover Multiple Separated Convex Polygonal Regions. IEEE Access 2020, 8, 51770–51785. [Google Scholar] [CrossRef]
- Li, Z.; Langelaan, J.W. Parameterized Trajectory Planning for Dynamic Soaring. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2020. [Google Scholar]
- Zhao, J.S.; Shang, T.; Zhang, J.M.; Cheng, X.M.; Liu, J.L. Pseudo-Spectral Trajectory Optimization Method with Constraint on the Change Rate of Control Variables. J. Astronaut. 2022, 43, 1368–1377. [Google Scholar]
- Teng, J.; An, Y.; Wang, L. Time-Optimal Control Problem for a Linear Parameter Varying System with Nonlinear Item. J. Frankl. Inst. 2022, 359, 859–869. [Google Scholar] [CrossRef]
- Chai, R.; Tsourdos, A.; Savvaris, A.; Xia, Y.; Chai, S. Real-Time Reentry Trajectory Planning of Hypersonic Vehicles: A Two-Step Strategy Incorporating Fuzzy Multiobjective Transcription and Deep Neural Network. IEEE Trans. Ind. Electron. 2019, 67, 6904–6915. [Google Scholar] [CrossRef]
- Egerstedt, M.; Martin, C.F. Optimal Trajectory Planning and Smoothing Splines. Automatica 2001, 37, 1057–1064. [Google Scholar] [CrossRef]
- Liu, G.; Li, B.; Ji, Y. A Modified HP-Adaptive Pseudospectral Method for Multi-UAV Formation Reconfiguration. ISA Trans. 2022, 129, 217–229. [Google Scholar] [CrossRef]
- Lu, Y.; Hu, J.; Chen, G.; Liu, A.; Feng, J. Optimization of Water-Entry and Water-Exit Maneuver Trajectory for Morphing Unmanned Aerial-Underwater Vehicle. Ocean. Eng. 2022, 261, 112015. [Google Scholar] [CrossRef]
- Flanzer, T.; Bower, G.; Kroo, I. Robust Trajectory Optimization for Dynamic Soaring. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4603. [Google Scholar]
- Zhao, Y.J. Optimal Patterns of Glider Dynamic Soaring. Optim. Control Appl. Meth. 2004, 25, 67–89. [Google Scholar] [CrossRef]
- Zhang, T.; Su, H.; Gong, C. Hp-Adaptive RPD Based Sequential Convex Programming for Reentry Trajectory Optimization. Aerosp. Sci. Technol. 2022, 130, 107887. [Google Scholar] [CrossRef]
- Park, J.; Kim, I.; Suk, J.; Kim, S. Trajectory Optimization for Takeoff and Landing Phase of UAM Considering Energy and Safety. Aerosp. Sci. Technol. 2023, 140, 108489. [Google Scholar] [CrossRef]
- Wang, Z. Optimal Trajectories and Normal Load Analysis of Hypersonic Glide Vehicles via Convex Optimization. Aerosp. Sci. Technol. 2019, 87, 357–368. [Google Scholar] [CrossRef]
- Luo, S.; Sun, Q.; Tao, J.; Liang, W.; Chen, Z. Trajectory Planning and Gathering for Multiple Parafoil Systems Based on Pseudo-Spectral Method. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 2553–2558. [Google Scholar]
- Gao, X.Z.; Hou, Z.X.; Guo, Z.; Chen, X.Q.; Chen, X.Q. Joint Optimization of Battery Mass and Flight Trajectory for High-Altitude Solar-Powered Aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 2439–2451. [Google Scholar] [CrossRef]
- Sachs, G.; Da Costa, O. Dynamic Soaring in Altitude Region below Jet Streams. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2006. [Google Scholar]
- Liu, D.N. Research on Mechanism and Trajectory Optimization for Dynamic Soaring with Fixed-Wing Unmanned Aerial Vehicles. Ph.D. Thesis, Graduate School of National University of Defense Technology, Changsha, China, 2016. [Google Scholar]
- Gao, X.-Z.; Hou, Z.-X.; Guo, Z.; Fan, R.-F.; Chen, X.-Q. Analysis and Design of Guidance-Strategy for Dynamic Soaring with UAVs. Control Eng. Pract. 2014, 32, 218–226. [Google Scholar] [CrossRef]
- Guo, W.; Zhao, Y.J.; Capozzi, B. Optimal Unmanned Aerial Vehicle Flights for Seeability and Endurance in Winds. J. Aircr. 2011, 48, 305–314. [Google Scholar] [CrossRef]
- Mir, I.; Eisa, S.A.; Maqsood, A. Review of Dynamic Soaring: Technical Aspects, Nonlinear Modeling Perspectives and Future Directions. Nonlinear Dyn. 2018, 94, 3117–3144. [Google Scholar] [CrossRef]
- Shaw-Cortez, W.E.; Frew, E. Efficient Trajectory Development for Small Unmanned Aircraft Dynamic Soaring Applications. J. Guid. Control Dyn. 2015, 38, 519–523. [Google Scholar] [CrossRef]
- Xiao, Z.; Wang, Q.; Sun, P.; You, B.; Feng, X. Modeling and Energy-Optimal Control for High-Speed Trains. IEEE Trans. Transp. Electrif. 2020, 6, 797–807. [Google Scholar] [CrossRef]
- Kelly, M. An Introduction to Trajectory Optimization: How to Do Your Own Direct Collocation. SIAM Rev. 2017, 59, 849–904. [Google Scholar] [CrossRef]
- Betts, J.T.; Huffman, W.P. Application of Sparse Nonlinear Programming to Trajectory Optimization. J. Guid. Control Dyn. 1992, 15, 198–206. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Altitude Range | Wind Magnitude | Wind Gradient |
|---|---|---|---|
| Low-altitude | 1.1–0.5 km | 7 m/s | 0.016 s−1 |
| High-altitude | 8.3–6 km | 20 m/s | 0.016 s−1 |
| Parameters | Value |
|---|---|
| 20 kg | |
| 9.81 m/s2 | |
| Aspect Radio | 11.5 |
| 1.8 m | |
| 0.58 m2 |
| Coefficient | Value |
|---|---|
| 0.0621 | |
| −0.0853 | |
| 0.1254 |
| State Variables | Values |
| [−30,000 m, 30,000 m] | |
| [−30,000 m, 30,000 m] | |
| [0, 9000 m] | |
| [25 m/s, 60 m/s] | |
| [−45°, 45°] | |
| [−180°, 180°] | |
| [0, 40 N] | |
| Control Variables | Values |
| [0, 1.2] | |
| [−45°, 45°] | |
| [0, 10 N/s] | |
| Path Constraints | Values |
| (load factor) | [−2, 3] |
| 50 m |
| Conditions | Objective Description |
|---|---|
| Optimal energy | |
| Optimal terminal time | |
| , | Optimal travel distance |
| UAV Identifier | Phase 1 | Phase 2 | |
|---|---|---|---|
| Initial State (m) | Final State (m) | Final State (m) | |
| UAV 0 | [0, 0, 1000] | [x0(tf(1)), y0(tf(1)), 500] | [x0(tf(2)), y0(tf(2)), 500] |
| UAV 1 | [0, 200, 1000] | [x0(tf(1)), y0(tf(1)) + 120, 500] | [x0(tf(2)), y0(tf(2)) + 120, 500] |
| UAV 2 | [0, 100, 1100] | [x0(tf(1)) + 120, y0(tf(1)), 500] | [x0(tf(2)) + 120, y0(tf(2)), 500] |
| UAV 3 | [0, 300, 1100] | [x0(tf(1)) + 120, y0(tf(1)) + 120, 500] | [x0(tf(2)) + 120, y0(tf(2)) + 120, 500] |
| Wind Condition | Maximum Rendezvous Distance (m) | Phase Duration (s) | Maximum Electrical Energy Consumption (Wh) | Maximum Average Power (W) | Percentage of Average Power | Percentage of Expand Range | |
|---|---|---|---|---|---|---|---|
| Phase 1: Rendezvous Trajectory | No-wind | 5284 | 133 | 10 | 270.7 | 100% | 100% |
| Tailwind | 9467 | 185 | 10 | 194.6 | 71.9% | 179.2% | |
| Phase 2: Formation Flight | No-wind | N/A | 17 | 3.9 | 825.9 | 100% | N/A |
| Tailwind | N/A | 26 | 5 | 692.3 | 83.8% | N/A |
| UAV Identifier | Phase 1 | Phase 2 | |
|---|---|---|---|
| Initial State (m) | Final State (m) | Final State (m) | |
| UAV 0 | [0, 0, 8000] | [20,000, 20,000, 6000] | [22,000, 22,000, 6000] |
| UAV 1 | [0, 200, 8000] | [20,000, 20,120, 6000] | [22,000, 22,120, 6000] |
| UAV 2 | [0, 100, 8200] | [20,120, 20,000, 6000] | [22,120, 22,000, 6000] |
| UAV 3 | [0, 300, 8200] | [20,120, 20,120, 6000] | [22,120, 22,120, 6000] |
| Phase Duration (s) | Maximum Electrical Energy Consumption (Wh) | Maximum Average Power (W) | Percentage of Average Power | ||
|---|---|---|---|---|---|
| Phase 1: Rendezvous Trajectory | 0.01 | 402 | 18 | 161.2 W | 100% |
| 0.1 | 439 | 3 | 24.6 W | 15.3% | |
| 1 | 449 | 0.1 | 0.8 W | 0.5% | |
| 10 | 451 | 0 | 0 | 0 | |
| 100 | 452 | 0 | 0 | 0 | |
| Phase 2: Formation Flight | 0.01 | 49.7 | 15 | 1086.5 W | 100% |
| 0.1 | 50 | 14.7 | 1058.4 W | 97.4% | |
| 1 | 57 | 12 | 757.9 W | 69.8% | |
| 10 | 60 | 11.9 | 714 W | 65.7% | |
| 100 | 61 | 11.8 | 696.4 W | 64.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Ma, T.; Zhang, L.; Qiao, N.; Xue, P.; Fu, J. Multi-Phase Trajectory Planning for Wind Energy Harvesting in Air-Launched UAV Swarm Rendezvous and Formation Flight. Drones 2024, 8, 709. https://doi.org/10.3390/drones8120709
Wang X, Ma T, Zhang L, Qiao N, Xue P, Fu J. Multi-Phase Trajectory Planning for Wind Energy Harvesting in Air-Launched UAV Swarm Rendezvous and Formation Flight. Drones. 2024; 8(12):709. https://doi.org/10.3390/drones8120709
Chicago/Turabian StyleWang, Xiangsheng, Tielin Ma, Ligang Zhang, Nanxuan Qiao, Pu Xue, and Jingcheng Fu. 2024. "Multi-Phase Trajectory Planning for Wind Energy Harvesting in Air-Launched UAV Swarm Rendezvous and Formation Flight" Drones 8, no. 12: 709. https://doi.org/10.3390/drones8120709
APA StyleWang, X., Ma, T., Zhang, L., Qiao, N., Xue, P., & Fu, J. (2024). Multi-Phase Trajectory Planning for Wind Energy Harvesting in Air-Launched UAV Swarm Rendezvous and Formation Flight. Drones, 8(12), 709. https://doi.org/10.3390/drones8120709