
Joint Optimization Strategy of Task Migration and Power Allocation Based on Soft Actor-Critic in Unmanned Aerial Vehicle-Assisted Internet of Vehicles Environment

Abstract
1. Introduction
- (1)
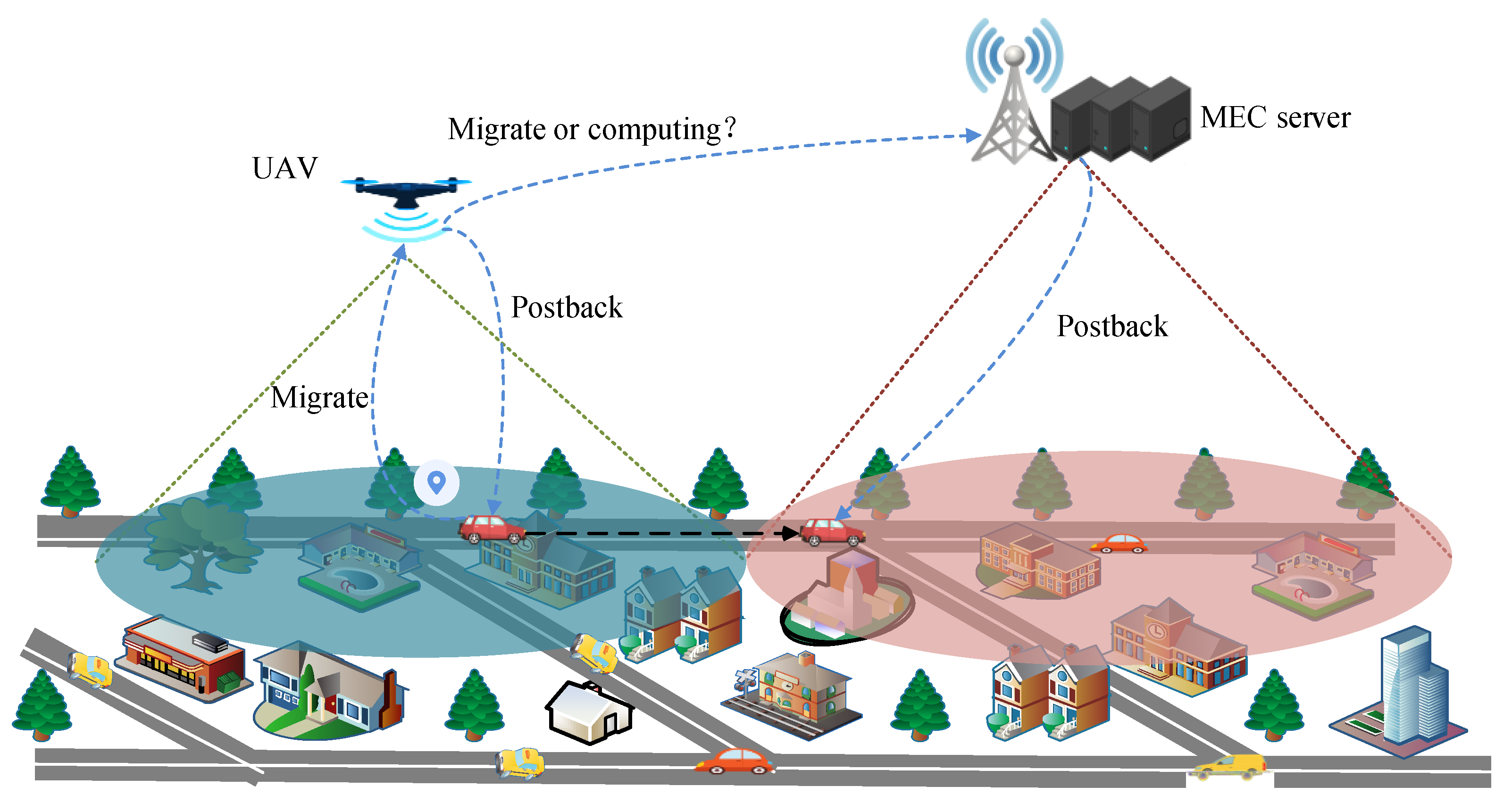
- In the UAV-assisted vehicular network, a mathematical model is established to jointly optimize task migration and power allocation. This model considers the time-sensitive nature of tasks in the system. To minimize task processing delay and energy consumption while ensuring service continuity, a non-convex optimization problem is formulated.
- (2)
- An SAC-based joint optimization algorithm for task migration and power allocation (SAC-JOTMP) is proposed to solve this complex optimization problem. The algorithm dynamically adjusts the task migration and power allocation strategies to optimize the network performance in real-time.
- (3)
- Comprehensive simulation experiments are conducted to validate the effectiveness and advantages of the proposed algorithm. The simulation results demonstrate that the SAC-JOTMP algorithm significantly reduces task processing delay and energy consumption while enhancing system performance and service continuity.
2. Relate Work
3. System Model
3.1. Communication Model
3.2. Resource Allocation Model
3.3. Computing Model
3.3.1. Local Model
3.3.2. Migration Model
3.4. Energy Model
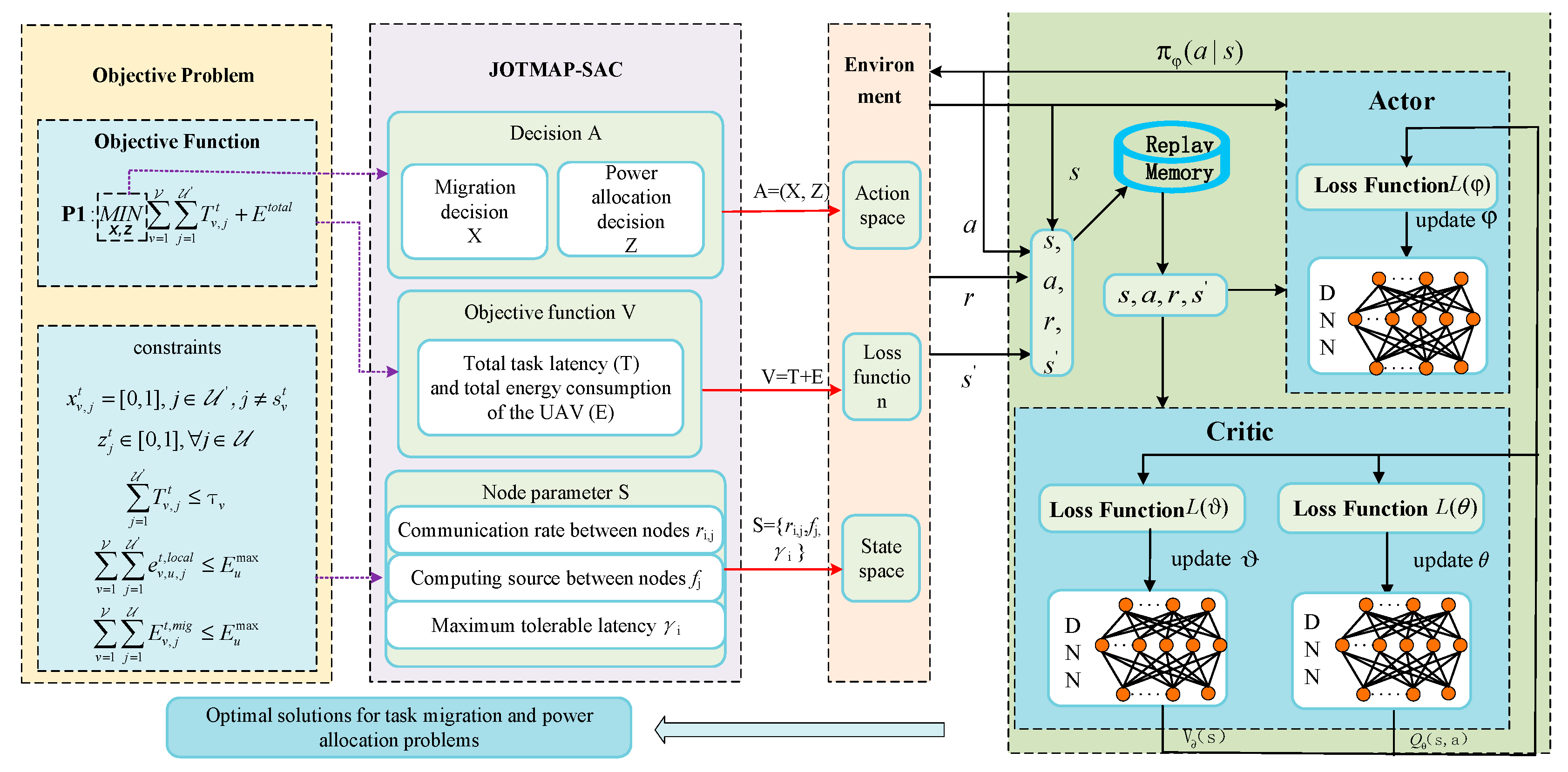
4. Algorithm Design
- (1)
- Define State Space
- (2)
- Define Action Space
- (3)
- Define Reward Function
| Algorithm 1: The joint optimization algorithm of task migration and power allocation based on SAC (JOTMAP-SAC) |
| Input: The parameter , , the size of experience pool, the randomly sampling parameter |
| Output: The optimal value of , , 1: for each episode do 2: for time step n = 1, 2, …, N do 3: The initial state 4: Achieving the initial state and the action by actor network 5: Executing action and achieving the reward and next state 6: Storing the current experience into the experience pool 8: Randomly sampling by Equation (34) by Equation (35) 11: Updating the objective network parameter 12: end 13: end |
5. Use Case
6. Numerical Simulation and Analysis
6.1. Experiment Environment
6.2. Benchmark Algorithms
- (1)
- A DQN-based joint optimization of task migration and power allocation algorithm (JOTMAP-DQN): This algorithm utilizes Deep Q-Network (DQN) to make migration decisions and determine power allocation strategies within a single time slot. By combining Q-learning with deep neural networks, DQN allows the agent to learn optimal policies based on the current state, which is crucial in dynamic environments like UAV-assisted vehicular networks. The deep neural network is employed to approximate the Q-function, representing the expected future rewards for a given state-action pair, facilitating efficient decision-making within the constraints of a single time slot [32].
- (2)
- A DDPG-based joint optimization of task migration and power allocation algorithm (JOTMAP-DDPG): This algorithm utilizes Deep Deterministic Policy Gradient (DDPG), based on the Actor-Critic architecture, to make migration and power allocation decisions. By combining deep learning with the policy gradient method, DDPG efficiently handles continuous action spaces, enabling real-time decision-making in UAV-assisted vehicular networks within a single time slot [33].
- (3)
- Task Migration Optimization with Fixed Power Allocation based on SAC (OTMFPA-SAC): This algorithm assigns a fixed power value to the UAV. When there are vehicular tasks that cannot be processed at the local node, a portion of these tasks will be migrated to edge nodes for execution based on optimal migration decisions.
- (4)
- Power Allocation Optimization with Full Task Migration and based on SAC (OFTMPA-SAC): This algorithm migrates all tasks to edge nodes. For the tasks that are migrated to the UAV, we implement an optimal power allocation decision to ensure that all tasks are processed at the edge nodes.
6.3. Metrics
6.4. Numerical Results
- (1)
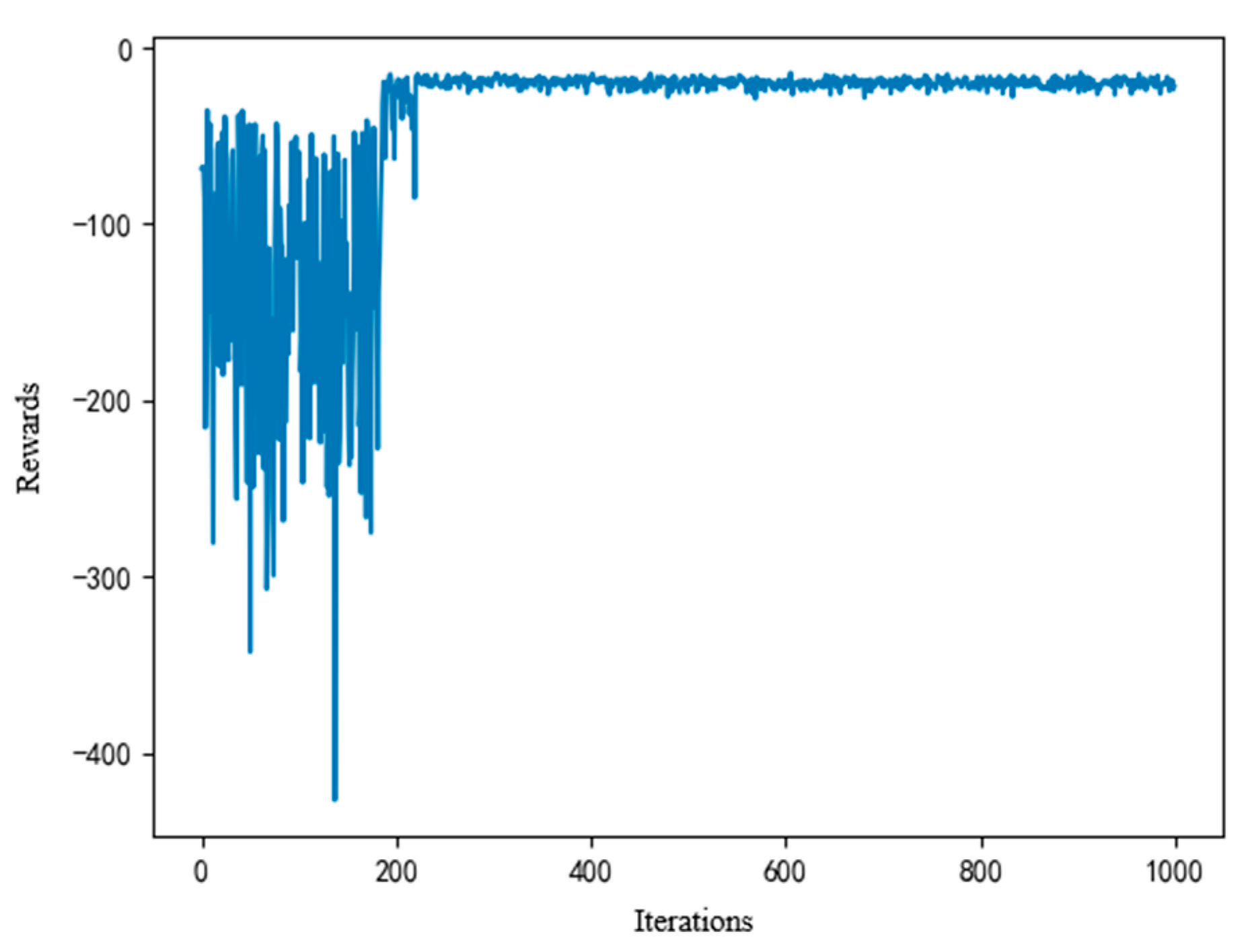
- Feasibility of JOTMAP-SAC Algorithm
- (2)
- The impact of the number of vehicles on the experimental results
- (3)
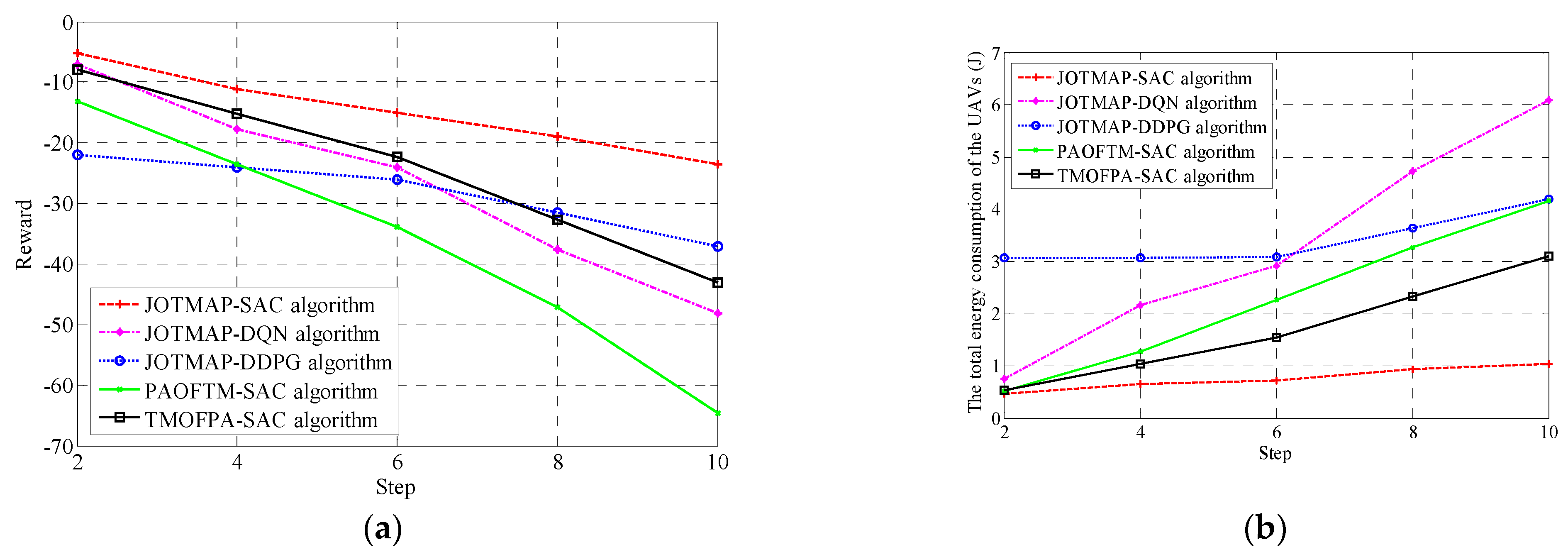
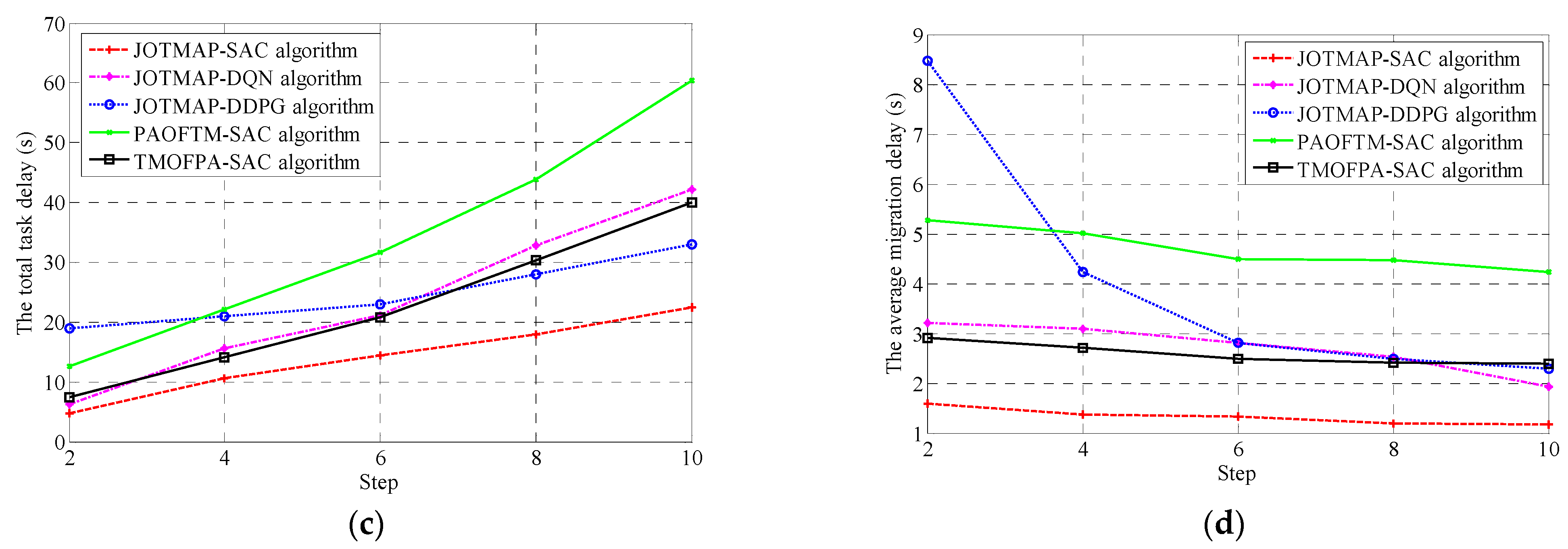
- The impact of the step size on the experimental results
- (4)
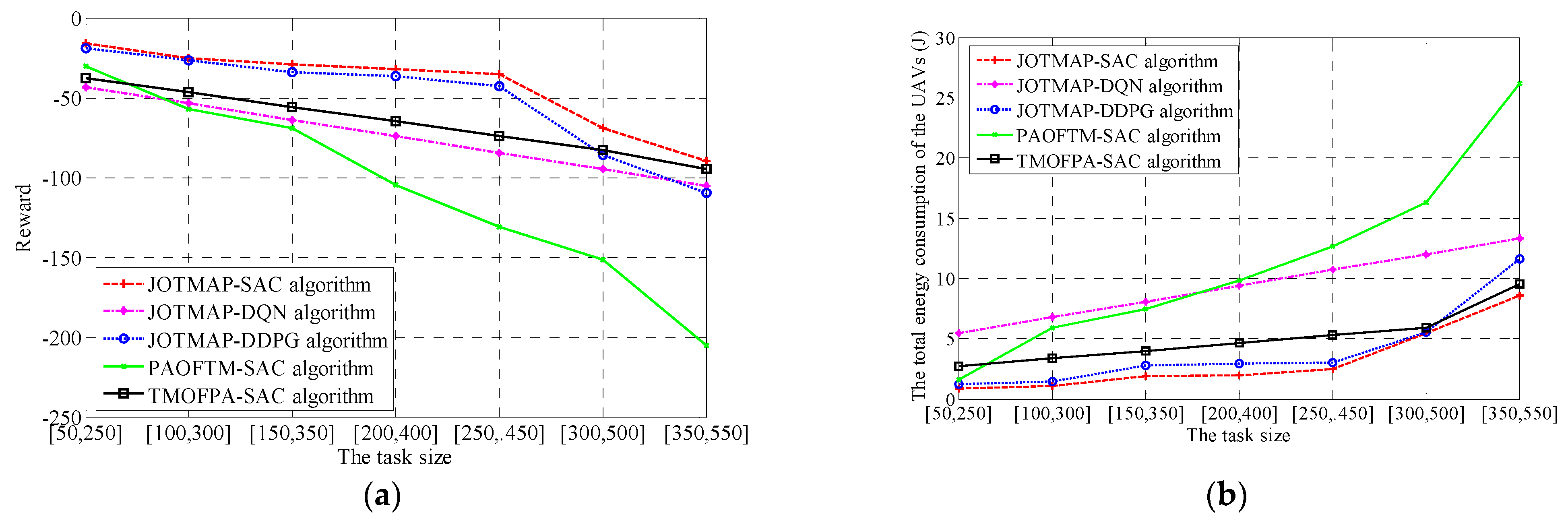
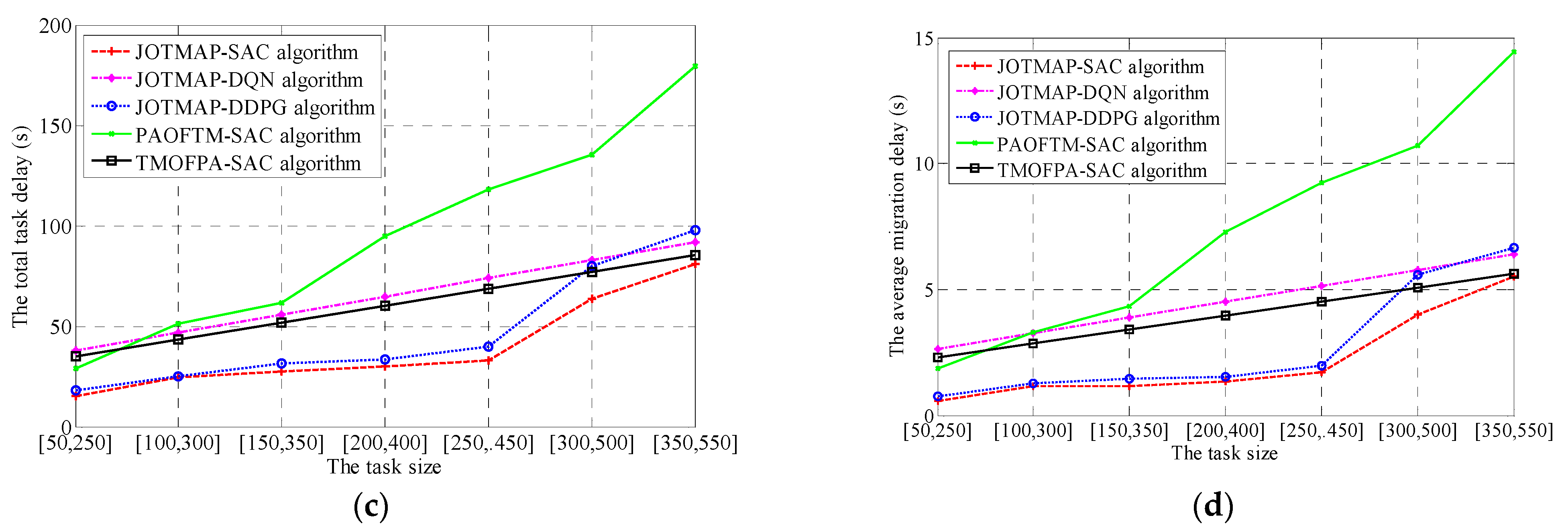
- The impact of the task size on the experimental results
- (5)
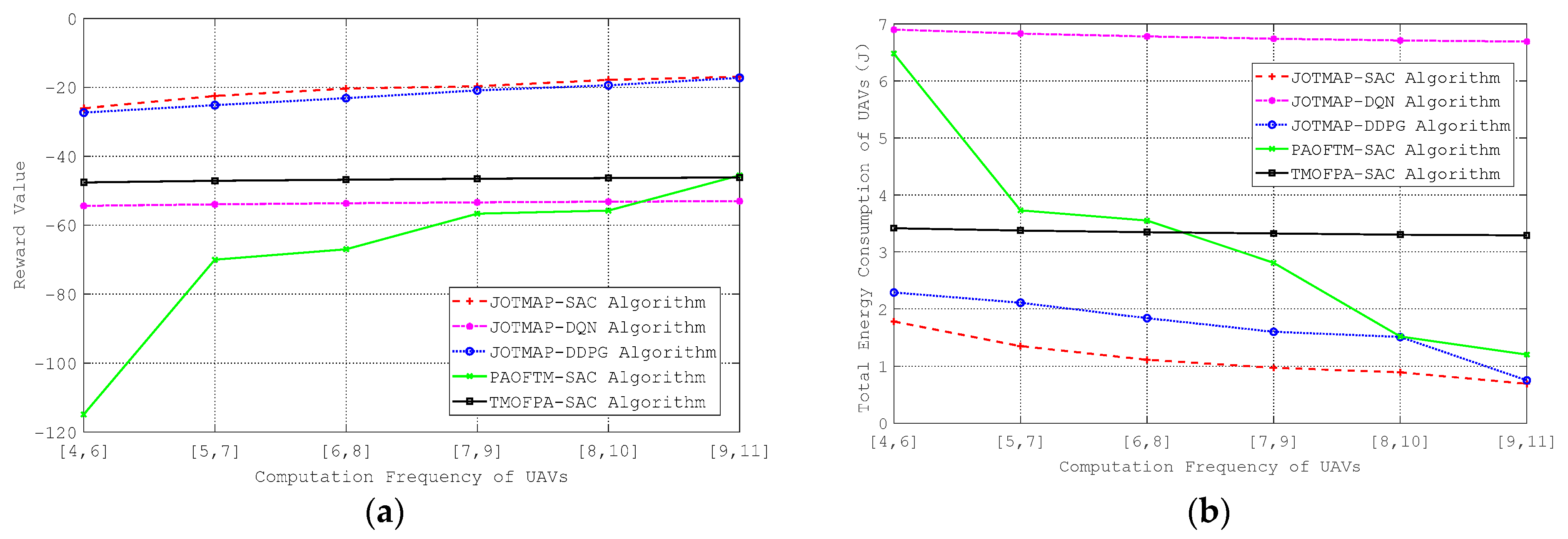
- The impact of the UAVs computing frequency on the experimental results
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fang, Y.; Li, M.; Si, P.; Yang, R.; Wang, Z. Distributed Resource Optimization and Allocation for UAV-Assisted MEC in Internet of Vehicles. In Proceedings of the 2023 IEEE/CIC International Conference on Communications in China (ICCC), Dalian, China, 10–12 August 2023; pp. 1–6. [Google Scholar]
- Xing, L. Reliability in Internet of Things: Current status and future perspectives. IEEE Internet Things J. 2020, 7, 6704–6721. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A survey of the connected vehicle landscape—Architectures, enabling technologies, applications, and development areas. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2391–2406. [Google Scholar] [CrossRef]
- Zhang, L.; Ansari, N. Optimizing the operation cost for UAV-aided mobile edge computing. IEEE Trans. Veh. Technol. 2021, 70, 6085–6093. [Google Scholar] [CrossRef]
- Wu, L.; Wang, W. Resource allocation optimization of UAVs-enabled air-ground collaborative emergency network in disaster area. Int. J. Perform. Eng. 2019, 15, 2133. [Google Scholar]
- Lin, Y.; Wang, M.; Zhou, X.; Ding, G.; Mao, S. Dynamic spectrum interaction of UAV flight formation communication with priority: A deep reinforcement learning approach. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 892–903. [Google Scholar] [CrossRef]
- Zhang, C.; Fu, W. Optimal model for patrols of UAVs in power grid under time constraints. Int. J. Perform. Eng. 2021, 17, 103. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for UAV-enabled mobile relaying systems. IEEE Trans. Commun. 2016, 64, 4983–4996. [Google Scholar] [CrossRef]
- Tun, Y.K.; Park, Y.M.; Tran, N.H.; Saad, W.; Pandey, S.R.; Hong, C.S. Energy-efficient resource management in UAV-assisted mobile edge computing. IEEE Commun. Lett. 2020, 25, 249–253. [Google Scholar] [CrossRef]
- Sun, L.; Wan, L.; Wang, J.; Lin, L.; Gen, M. Joint resource scheduling for UAV-enabled mobile edge computing system in Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 24, 15624–15632. [Google Scholar] [CrossRef]
- Noferi, A.; Nardini, G.; Stea, G.; Virdis, A. Rapid prototyping and performance evaluation of ETSI MEC-based applications. Simul. Model. Pract. Theory 2023, 123, 102700. [Google Scholar] [CrossRef]
- Zhao, F.; Jiang, T.; Xu, T.; Zhu, N. A co-evolutionary migrating birds optimization algorithm based on online learning policy gradient. Expert Syst. Appl. 2023, 228, 120261. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, H.; Liu, C.; Li, X.; Ji, H.; Leung, V.C. Online service deployment on mega-LEO satellite constellations for end-to-end delay optimization. IEEE Trans. Netw. Sci. Eng. 2023, 11, 1214–1226. [Google Scholar] [CrossRef]
- Hsieh, C.-Y.; Ren, Y.; Chen, J.-C. Edge-cloud offloading: Knapsack potential game in 5G multi-access edge computing. IEEE Trans. Wirel. Commun. 2023, 22, 7158–7171. [Google Scholar] [CrossRef]
- Ghosh, S.; Kuila, P. Efficient offloading in disaster-affected areas using unmanned aerial vehicle-assisted mobile edge computing: A gravitational search algorithm-based approach. Int. J. Disaster Risk Reduct. 2023, 97, 104067. [Google Scholar] [CrossRef]
- Heidarpour, A.R.; Heidarpour, M.R.; Ardakani, M.; Tellambura, C.; Uysal, M. Soft actor–critic-based computation offloading in multiuser MEC-enabled IoT—A lifetime maximization perspective. IEEE Internet Things J. 2023, 10, 17571–17584. [Google Scholar] [CrossRef]
- Peng, K.; Huang, H.; Wan, S.; Leung, V.C. End-edge-cloud collaborative computation offloading for multiple mobile users in heterogeneous edge-server environment. Wirel. Netw. 2020, 30, 3495–3506. [Google Scholar] [CrossRef]
- Abbasi, M.H.A.; Arshed, J.U.; Ahmad, I.; Afzal, M.; Ali, H.; Hussain, G. A Mobility Prediction Based Adaptive Task Migration in Mobile Edge Computing. VFAST Trans. Softw. Eng. 2024, 12, 46–55. [Google Scholar]
- Qin, W.; Chen, H.; Wang, L.; Xia, Y.; Nascita, A.; Pescapè, A. MCOTM: Mobility-aware computation offloading and task migration for edge computing in industrial IoT. Future Gener. Comput. Syst. 2024, 151, 232–241. [Google Scholar] [CrossRef]
- Cui, G.; He, Q.; Xia, X.; Chen, F.; Dong, F.; Jin, H.; Yang, Y. OL-EUA: Online user allocation for NOMA-based mobile edge computing. IEEE Trans. Mob. Comput. 2021, 22, 2295–2306. [Google Scholar] [CrossRef]
- Tang, H.; Wu, H.; Qu, G.; Li, R. Double deep Q-network based dynamic framing offloading in vehicular edge computing. IEEE Trans. Netw. Sci. Eng. 2022, 10, 1297–1310. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, R.; Kaushik, A.; Gao, X. Satellite edge computing with collaborative computation offloading: An intelligent deep deterministic policy gradient approach. IEEE Internet Things J. 2023, 10, 9092–9107. [Google Scholar] [CrossRef]
- Liu, L.; Sun, B.; Tan, X.; Xiao, Y.S.; Tsang, D.H. Energy-efficient resource allocation and channel assignment for NOMA-based mobile edge computing. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar]
- Nie, J.; Mu, J.; Zhou, Q.; Jing, X. Offloading strategy for UAV-assisted mobile edge computing with computation rate maximization. In Proceedings of the 2023 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Beijing, China, 14–16 June 2023; pp. 1–6. [Google Scholar]
- Haarnoja, T.; Zhou, A.; Abbeel, P.; Levine, S. Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 1861–1870. [Google Scholar]
- Huang, Y.; Peng, N.; Yan, L.; Fan, J.; Zhang, Y.; Yu, Y. Dynamic spectrum resource allocation in internet of vehicles based on SAC reinforcement learning. Comput. Eng. 2021, 47, 34–43. [Google Scholar]
- Haarnoja, T.; Zhou, A.; Hartikainen, K.; Tucker, G.; Ha, S.; Tan, J.; Kumar, V.; Zhu, H.; Gupta, A.; Abbeel, P. Soft actor-critic algorithms and applications. arXiv 2018, arXiv:1812.05905. [Google Scholar]
- Zhou, X.; Huang, L.; Ye, T.; Sun, W. Computation bits maximization in UAV-assisted MEC networks with fairness constraint. IEEE Internet Things J. 2022, 9, 20997–21009. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Zhang, J.; Liu, B. Joint Trajectory Optimization and Task Offloading for UAV-Assisted Mobile Edge Computing. In Proceedings of the 2023 IEEE 34th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Toronto, ON, Canada, 5–8 September 2023; pp. 1–6. [Google Scholar]
- Wang, L.; Zhou, Q.; Shen, Y. Computation efficiency maximization for UAV-assisted relaying and MEC networks in urban environment. IEEE Trans. Green Commun. Netw. 2022, 7, 565–578. [Google Scholar] [CrossRef]
- Li, C.; Zhang, Y.; Luo, Y. DQN-enabled content caching and quantum ant colony-based computation offloading in MEC. Appl. Soft Comput. 2023, 133, 109900. [Google Scholar] [CrossRef]
- Sun, W.; Li, Z.; Shi, J.; Bai, Z.; Wang, F.; Quek, T.Q. MAHTD-DDPG-Based Multi-Objective Resource Allocation for UAV-Assisted Wireless Network. IEEE J. Miniaturiz. Air Space Syst. 2024. [Google Scholar] [CrossRef]
- Yang, C.; Chen, Q.; Zhu, Z.; Huang, Z.-A.; Lan, S.; Zhu, L. Evolutionary Multitasking for Costly Task Offloading in Mobile-Edge Computing Networks. IEEE Trans. Evol. Comput. 2023, 28, 338–352. [Google Scholar] [CrossRef]
- He, Y.; Fang, J.; Yu, F.R.; Leung, V.C. Large Language Models (LLMs) Inference Offloading and Resource Allocation in Cloud-Edge Computing: An Active Inference Approach. IEEE Trans. Mob. Comput. 2024, 23, 11253–11264. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Environment | Objective | Method | Considering Factors |
|---|---|---|---|---|
| [12] | Mobile edge computing | Helping researchers of ETSI MEC to evaluate the performance of products | Provide an architecture based on Simu5G and improve the performance of ETSI MEC | The number of edge servers |
| [13] | Satellite edge computing | Minimize the task process delay within the migration cost constraint | Propose the online satellite service deployment scheme based on Convolutional Proximal Policy Optimization | Steps, time, deployment location |
| [14] | Multiple access edge computing | Maximize the task process quality | Use the Knapsack Potential Game to obtain the optimal offloading ratio | High-priority task accessibility and performance deviation |
| [16] | UAV assisted edge computing | Minimize delay, energy consumption and load | Propose a computation offloading method based on Gravity search algorithm | The number of tasks, iteration times |
| [17] | Mobile edge computing | Maximize the network life within given the length of task queue | Propose a deep reinforcement learning life cycle maximization method based on soft actor-critic | Interval, bandwidth, CPU |
| [18] | Mobile edge computing | Minimize the task process time, energy consumption; Maximize the resource utilization rate of edge servers | Propose computation offloading method within terminal-edge-cloud collaboration | The number of users, edge servers and applications |
| [19] | Mobile edge computing | Predict the current location of users | Propose migration algorithm based on logistic regression | Data distribution, task numbers |
| [20] | Edge computing | Minimize the task process time and energy consumption | Propose a mobility-aware computation offloading and task migration method based on trajectory and resource prediction | The number of mobile terminals, the edge server distribution, the different migration decision |
| Ours | UAV assisted edge computing | Minimize the total task process delay and energy consumption of UAVs | Propose a joint optimization algorithm of task migration and power allocation based on SAC | The number of vehicles, the steps, the task size, the computation capacity of UAVs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, J.; Zhao, Y.; Yang, B.; Ji, H.; Liu, B.; Chen, Y. Joint Optimization Strategy of Task Migration and Power Allocation Based on Soft Actor-Critic in Unmanned Aerial Vehicle-Assisted Internet of Vehicles Environment. Drones 2024, 8, 693. https://doi.org/10.3390/drones8110693
Bai J, Zhao Y, Yang B, Ji H, Liu B, Chen Y. Joint Optimization Strategy of Task Migration and Power Allocation Based on Soft Actor-Critic in Unmanned Aerial Vehicle-Assisted Internet of Vehicles Environment. Drones. 2024; 8(11):693. https://doi.org/10.3390/drones8110693
Chicago/Turabian StyleBai, Jingpan, Yifan Zhao, Bozhong Yang, Houling Ji, Botao Liu, and Yunhao Chen. 2024. "Joint Optimization Strategy of Task Migration and Power Allocation Based on Soft Actor-Critic in Unmanned Aerial Vehicle-Assisted Internet of Vehicles Environment" Drones 8, no. 11: 693. https://doi.org/10.3390/drones8110693
APA StyleBai, J., Zhao, Y., Yang, B., Ji, H., Liu, B., & Chen, Y. (2024). Joint Optimization Strategy of Task Migration and Power Allocation Based on Soft Actor-Critic in Unmanned Aerial Vehicle-Assisted Internet of Vehicles Environment. Drones, 8(11), 693. https://doi.org/10.3390/drones8110693