
A Design of NLOS Communication Scheme Based on SC-FDE with Cyclic Suffix for UAV Payload Communication


Abstract
1. Introduction
- (1)
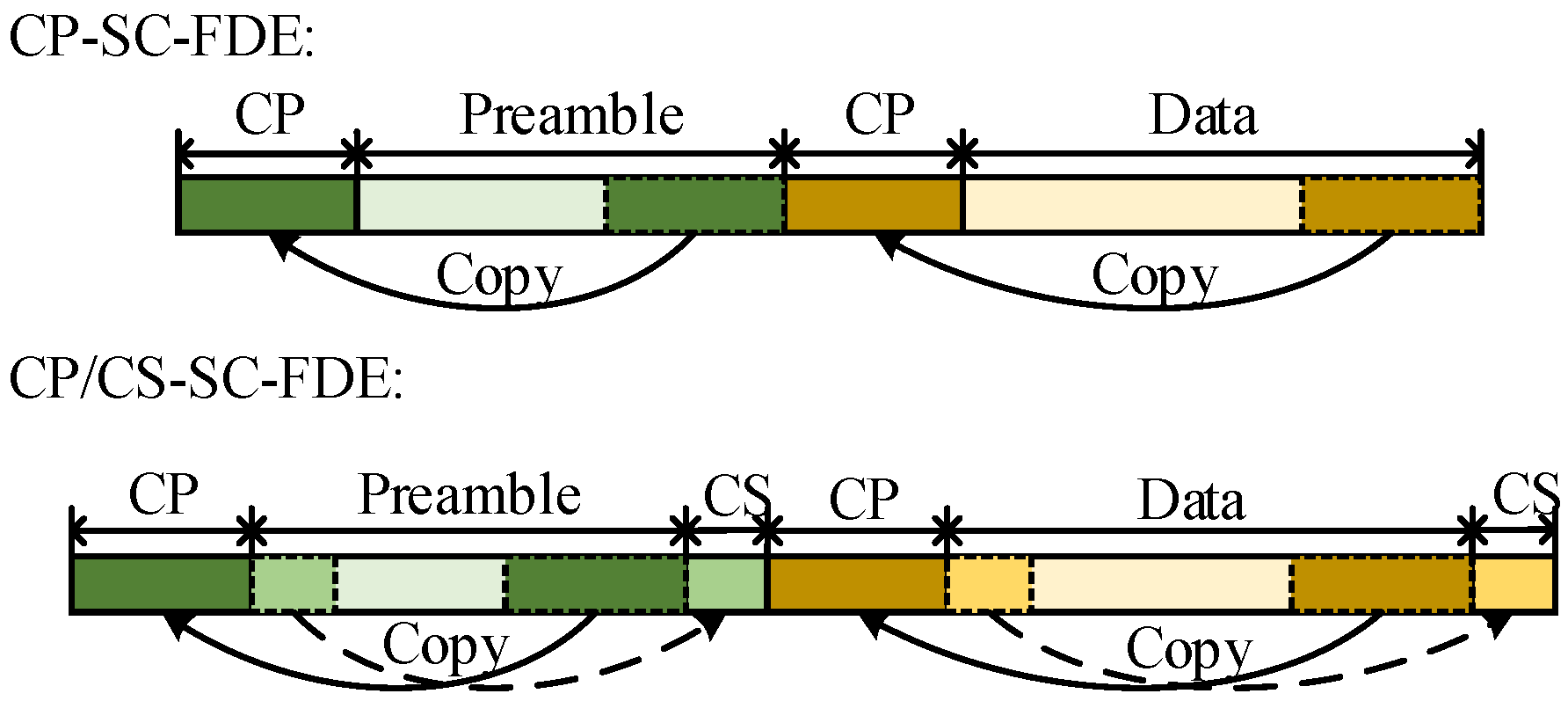
- We investigate the reason behind the generation of LISI in UAV NLOS communication. Moreover, the frame structure of conventional SC-FDE with CP (CP-SC-FDE) is improved, and we design an NLOS communication scheme based on SC-FDE with CP and CS (CP/CS-SC-FDE) for UAV PC. In addition, the scheme can be compatible with both LOS and NLOS communication.
- (2)
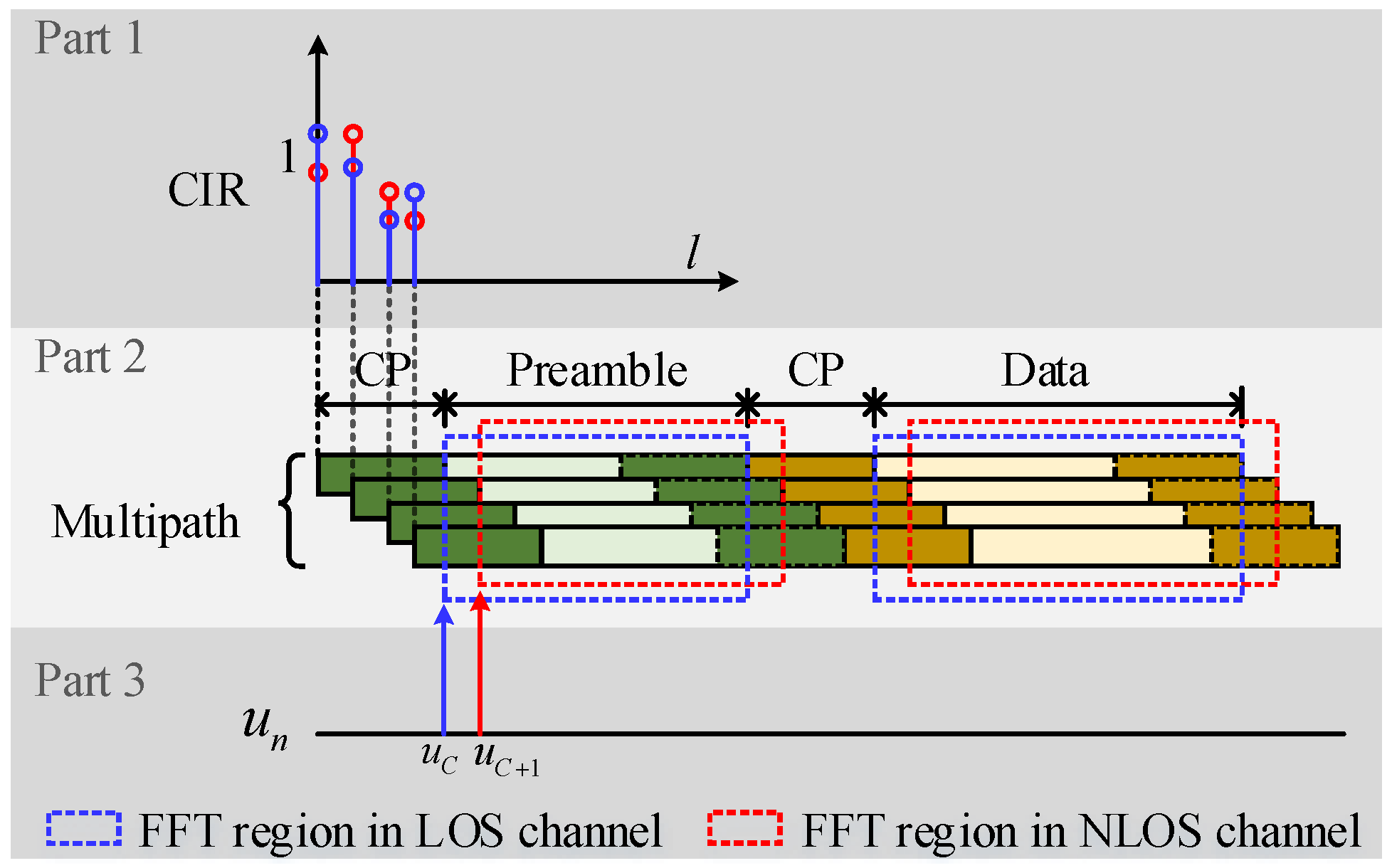
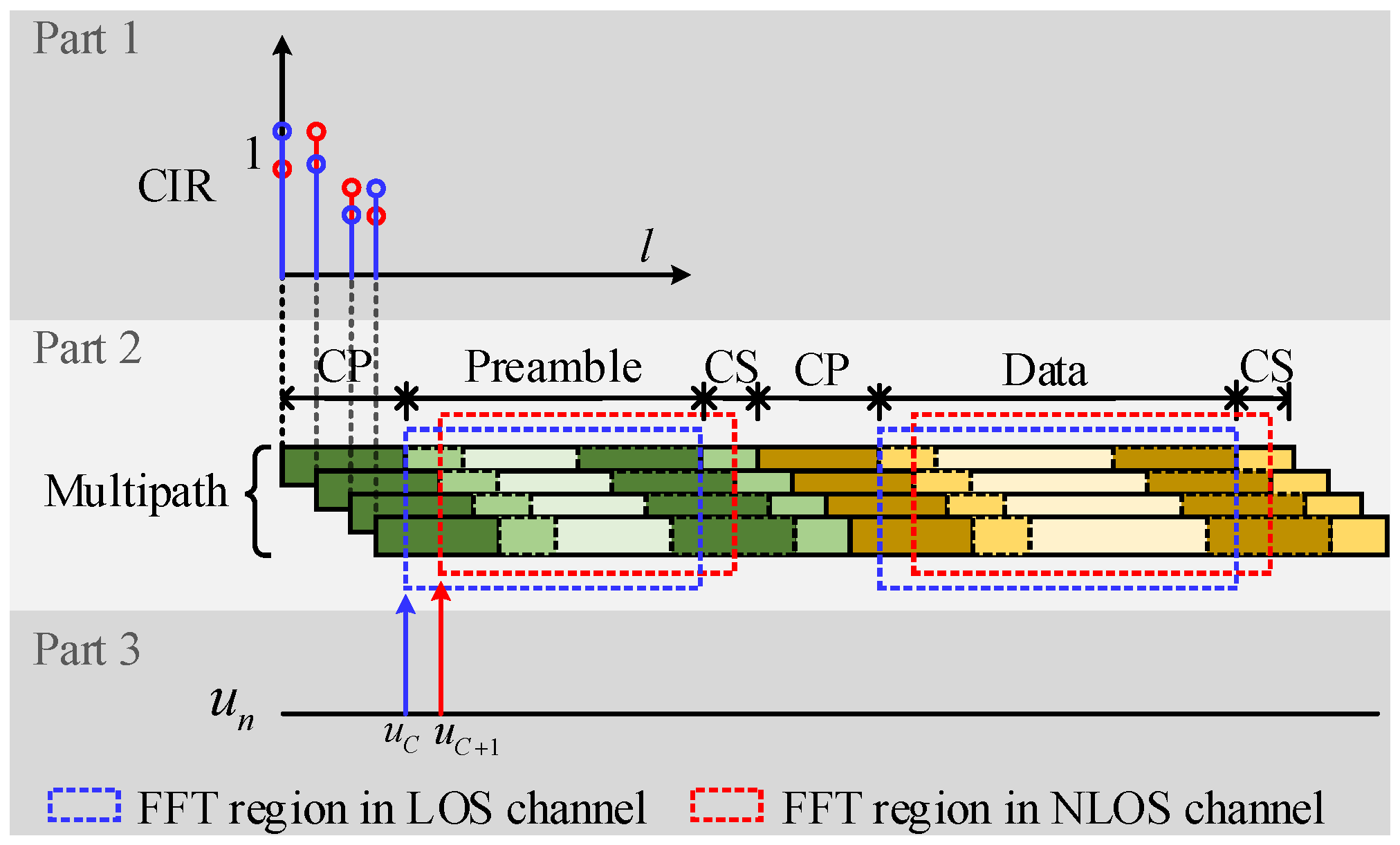
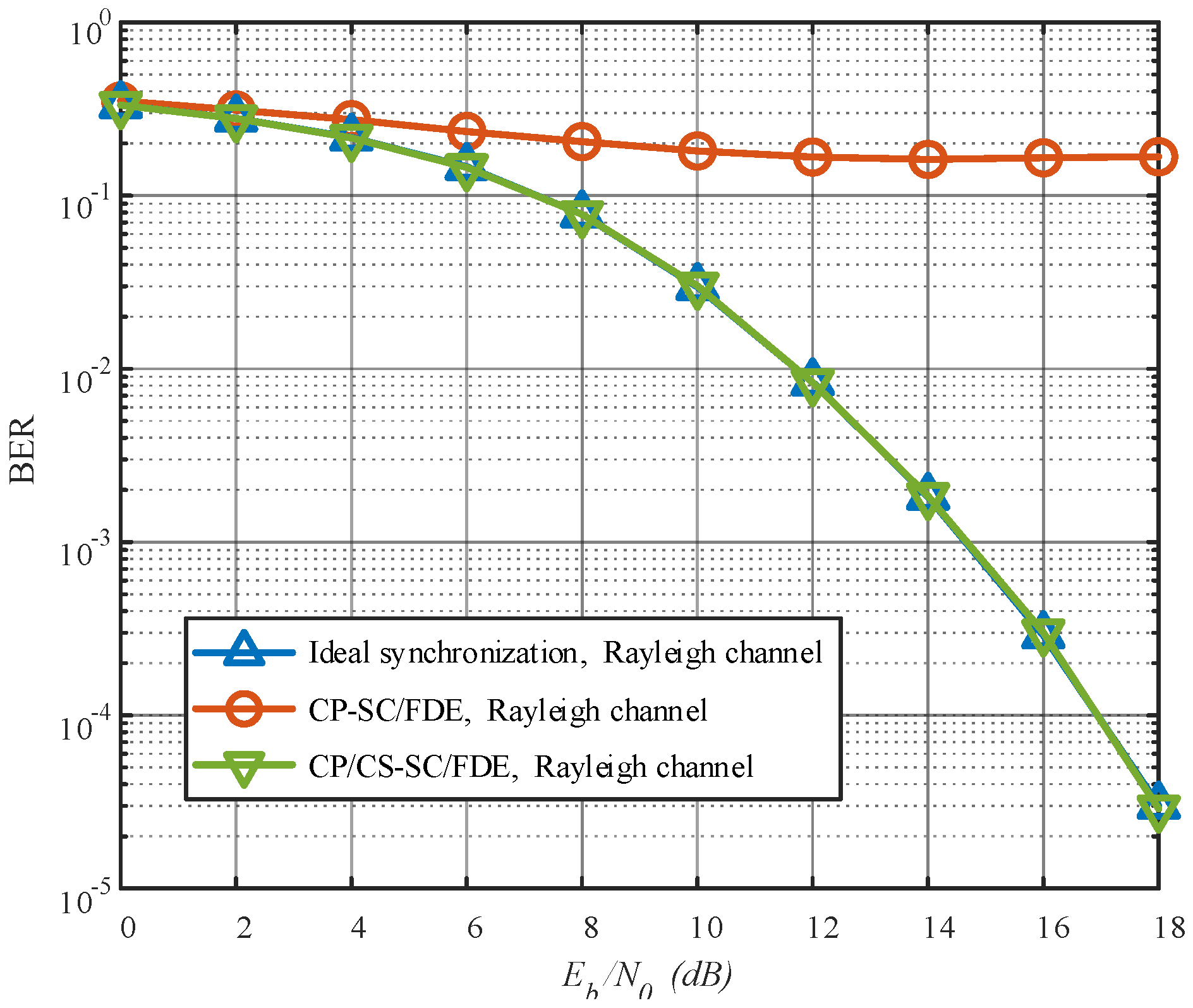
- A channel estimation algorithm applicable to this scheme is proposed, which can eliminate the ISI in UAV NLOS communication. Compared with the conventional CP-SC-FDE system, this scheme can achieve excellent performance in Rayleigh channel simulation. Moreover, the scheme does not need to eliminate the time synchronization offset but can achieve the same performance as the ideal synchronization.
2. Related Work
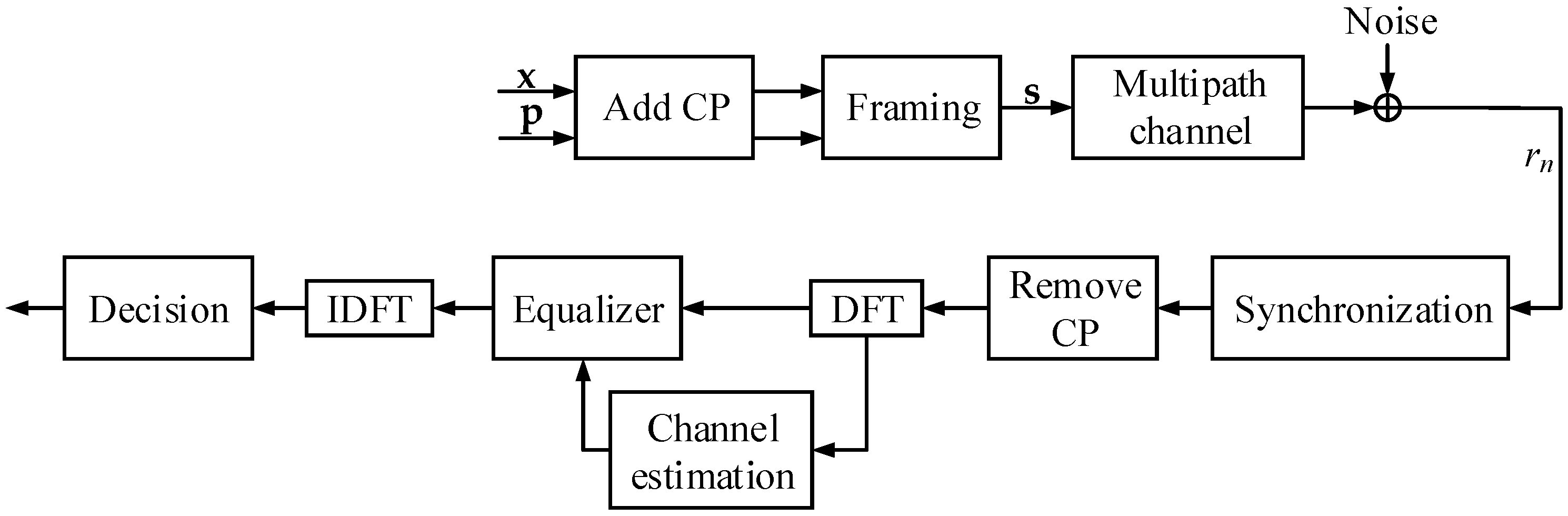
3. The System Model of CP-SC-FDE in UAV LOS Communication
4. The NLOS Communication Scheme Based on CP/CS-SC-FDE
4.1. CP-SC-FDE VS CP/CS-SC-FDE
4.2. The Channel Estimation Algorithm of CP/CS-SC-FDE for UAV PC
| Algorithm 1 Channel estimation algorithm of CP/CS-SC-FDE |
| Input: , ; |
| Output: ; |
| 1: Perform an M-point DFT transformation on ; |
| 2: Obtain the channel frequency response Using LS estimation ; |
| 3: Obtain by performing an M-point IDFT transformation on ; |
| 4: Set ; |
| 5: for all do |
| 6: if then |
| 7: ; |
| 8: else if then |
| 9: ; |
| 10: end if |
| 11: end for |
| 12: return . |
5. Numerical Results
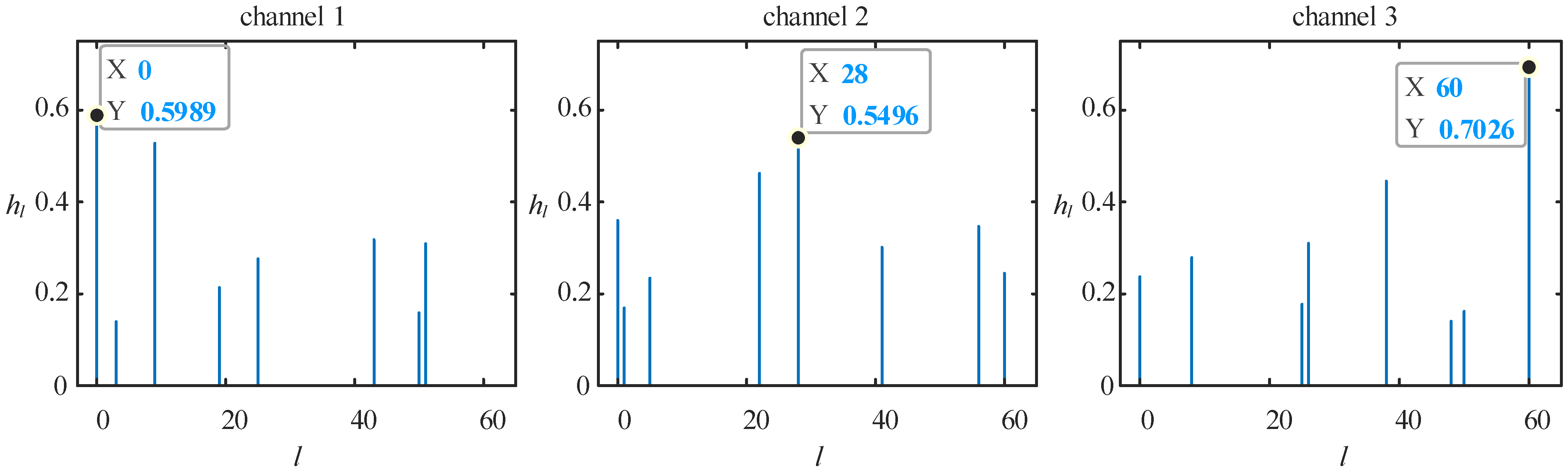
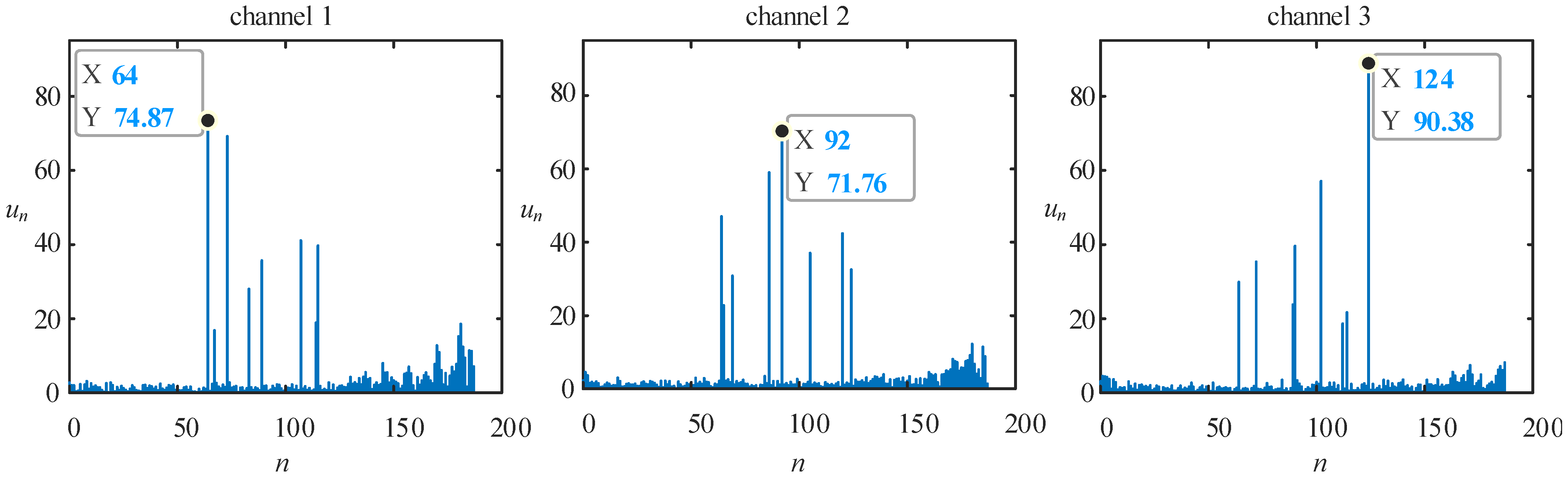
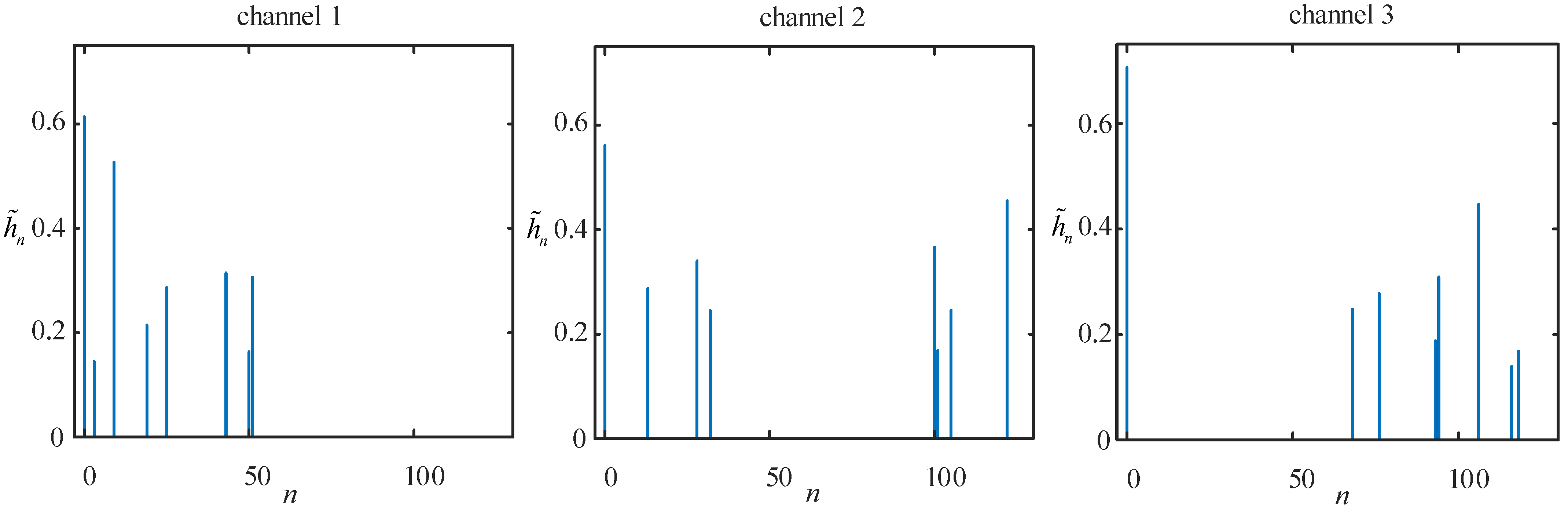
5.1. Simulation Results of Time Synchronization Offset and Channel Estimation in LOS and NLOS Channels
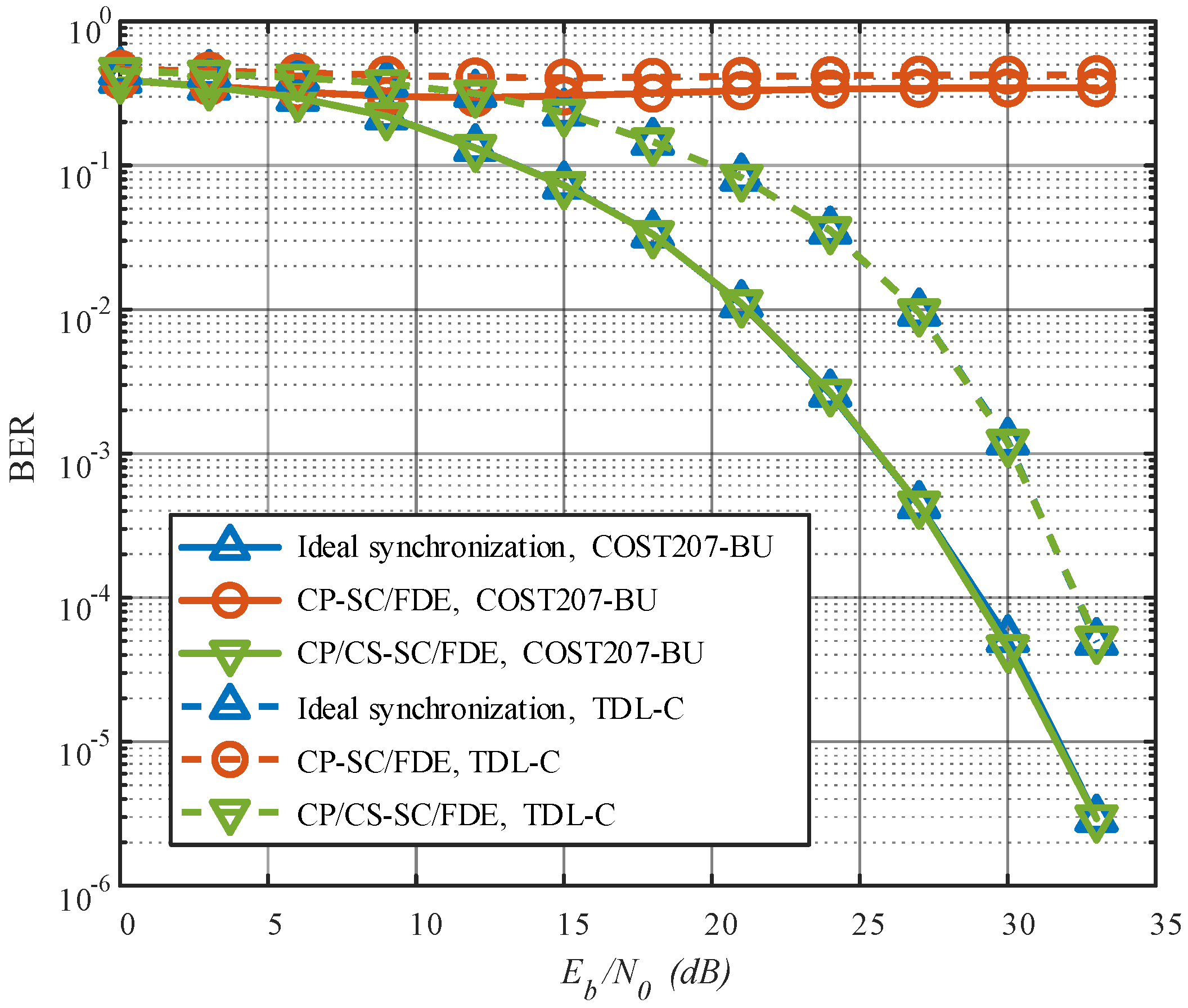
5.2. BER in Several Classes of NLOS Channels
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| NLOS | non-line-of-sight |
| UAV | unmanned aerial vehicle |
| CP | cyclic prefix |
| CS | cyclic suffix |
| SC-FDE | single-carrier frequency domain equalization |
| ISI | intersymbol interference |
| LISI | later intersymbol interference |
| CNPC | control and non-payload communication |
| PC | payload communication |
| GBS | ground base station |
| PISI | preceding intersymbol interference |
| PwMP | path with maximum power |
| FAP | first arrival path |
| BER | bit error rate |
| SNR | signal–noise ratio |
| ML | Maximum Likelihood |
| MF | Matched Filter |
| RIS | reconfigurable intelligent surfaces |
| DFT | Discrete Fourier Transform |
| CIR | channel impulse response |
| TO | time offset |
| IDFT | Inverse Discrete Fourier Transform |
| LS | Least Square |
| AWGN | additive Gaussian white noise |
References
- Zeng, B.; Zhang, Z.; Ding, X.; Bu, X.; An, J. Predictive decision and reliable accessing for UAV communication in space-air-ground integrated networks. China Commun. 2022, 19, 166–185. [Google Scholar] [CrossRef]
- Wu, Q.; Xu, J.; Zeng, Y.; Ng, D.W.K.; Al-Dhahir, N.; Schober, R.; Swindlehurst, A.L. A Comprehensive Overview on 5G-and-Beyond Networks With UAVs: From Communications to Sensing and Intelligence. IEEE J. Sel. Areas Commun. 2021, 39, 2912–2945. [Google Scholar] [CrossRef]
- Fan, C.; She, C.; Zhang, H.; Li, B.; Zhao, C.; Niyato, D. Learning to Optimize User Association and Spectrum Allocation With Partial Observation in mmWave-Enabled UAV Networks. IEEE Trans. Wirel. Commun. 2022, 21, 5873–5888. [Google Scholar] [CrossRef]
- Guerreiro, J.; Dinis, R.; Montezuma, P. Low-Complexity SC-FDE Techniques for Massive MIMO Schemes With Low-Resolution ADCs. IEEE Trans. Commun. 2019, 67, 2368–2380. [Google Scholar] [CrossRef]
- Lim, K.; Kim, H.; Hong, T.C.; Ahn, J.Y. Wideband channel waveform and structure for unmanned aircraft systems. In Proceedings of the 2017 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 18–20 October 2017; pp. 1222–1224. [Google Scholar] [CrossRef]
- Wang, Z.; Pu, F.; Yang, X.; Chen, N.; Shuai, Y.; Yang, R. Online LSTM-Based Channel Estimation for HF MIMO SC-FDE System. IEEE Access 2020, 8, 131005–131020. [Google Scholar] [CrossRef]
- Viana, J.; Madeira, J.; Nidhi; Sebastião, P.; Cercas, F.; Mihovska, A.; Dinis, R. Increasing Reliability on UAV Fading Scenarios. IEEE Access 2022, 10, 30959–30973. [Google Scholar] [CrossRef]
- Lakshmanan, M.; Noormohammed, V.; Nandakumar, S. Frequency domain equalization for single carrier wireless systems. In Proceedings of the 2009 International Conference on Control, Automation, Communication and Energy Conservation, Perundurai, India, 4–6 June 2009; pp. 1–7. [Google Scholar]
- Falconer, D.; Ariyavisitakul, S.; Benyamin-Seeyar, A.; Eidson, B. Frequency domain equalization for single-carrier broadband wireless systems. IEEE Commun. Mag. 2002, 40, 58–66. [Google Scholar] [CrossRef]
- Bilbao, I.; Iradier, E.; Montalban, J.; Angueira, P.; Park, S.I. Enhancing Channel Estimation in Terrestrial Broadcast Communications Using Machine Learning. IEEE Trans. Broadcast. 2024, 1–11. [Google Scholar] [CrossRef]
- Ning, X.; Zeng, M.; Hua, M.; Fei, Z. Multiple Reconfigurable Intelligent Surfaces Aided Vehicular Edge Computing Networks: A MAPPO-Based Approach. IEEE Trans. Veh. Technol. 2024, 1–14. [Google Scholar] [CrossRef]
- Lyu, Y.; Liang, C.; Chen, J.; Chen, P.; Guo, L.; Zhao, J.; Wang, W. Channel Measurements and Analysis for Fixed-Wing UAV-to-Vehicle Communications At 2.7 GHz in Rural Area. IEEE Antennas Wirel. Propag. Lett. 2024, 1–5. [Google Scholar] [CrossRef]
- Qing, C.; Liu, Z.; Hu, W.; Zhang, Y.; Cai, X.; Du, P. LoS Sensing-Based Channel Estimation in UAV-Assisted OFDM Systems. IEEE Wirel. Commun. Lett. 2024, 13, 1320–1324. [Google Scholar] [CrossRef]
- Ge, C.; Zhai, D.; Jiang, Y.; Zhang, R.; Yang, X.; Li, B.; Tang, X. Pathloss and Airframe Shadowing Loss of Air-to-Ground UAV Channel in the Airport Area at UHF- and L-Band. IEEE Trans. Veh. Technol. 2023, 72, 8094–8098. [Google Scholar] [CrossRef]
- Measurement-based fading characteristics analysis and modeling of UAV to vehicles channel. Veh. Commun. 2024, 45, 100707. [CrossRef]
- Khawaja, W.; Guvenc, I.; Matolak, D.W.; Fiebig, U.C.; Schneckenburger, N. A Survey of Air-to-Ground Propagation Channel Modeling for Unmanned Aerial Vehicles. IEEE Commun. Surv. Tutor. 2019, 21, 2361–2391. [Google Scholar] [CrossRef]
- Jiang, F.; Swindlehurst, A.L. Optimization of UAV Heading for the Ground-to-Air Uplink. IEEE J. Sel. Areas Commun. 2012, 30, 993–1005. [Google Scholar] [CrossRef]
- Vahidi, V.; Saberinia, E. Orthogonal frequency division multiplexing and channel models for payload communications of unmanned aerial systems. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1156–1161. [Google Scholar] [CrossRef]
- Li, Q.; Gong, F.K.; Song, P.Y.; Li, G.; Zhai, S.H. Beyond DVB-S2X: Faster-Than-Nyquist Signaling With Linear Precoding. IEEE Trans. Broadcast. 2020, 66, 620–629. [Google Scholar] [CrossRef]
- Hong, S.B.; Seo, J.S. Performance Enhancement of Faster-Than-Nyquist Signaling Based Single-Carrier Frequency-Domain Equalization Systems. IEEE Trans. Broadcast. 2016, 62, 918–935. [Google Scholar] [CrossRef]
- Hong, S.B.; Seo, J.S. An efficient insertion of the cyclic prefix/suffix for Frequency Domain Equalization in Faster-than-Nyquist signaling. In Proceedings of the 2016 39th International Conference on Telecommunications and Signal Processing (TSP), Vienna, Austria, 27–29 June 2016; pp. 437–440. [Google Scholar] [CrossRef]
- Chan, Y.C.; Tseng, P.H.; Lin, D.B.; Lin, H.P. Maximal power path detection for OFDM timing-advanced synchronization schemes. In Proceedings of the 2013 IEEE 24th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), London, UK, 8 September 2013; pp. 192–196. [Google Scholar] [CrossRef]
- Wang, S.; Mao, G.; Zhang, J.A. Joint Time-of-Arrival Estimation for Coherent UWB Ranging in Multipath Environment With Multi-User Interference. IEEE Trans. Signal Process. 2019, 67, 3743–3755. [Google Scholar] [CrossRef]
- Win, M.; Scholtz, R. Characterization of ultra-wide bandwidth wireless indoor channels: A communication-theoretic view. IEEE J. Sel. Areas Commun. 2002, 20, 1613–1627. [Google Scholar] [CrossRef]
- Dardari, D.; Chong, C.C.; Win, M. Threshold-Based Time-of-Arrival Estimators in UWB Dense Multipath Channels. IEEE Trans. Commun. 2008, 56, 1366–1378. [Google Scholar] [CrossRef]
- Dardari, D.; Chong, C.C.; Win, M.Z. Analysis of threshold-based ToA estimators in UWB channels. In Proceedings of the 2006 14th European Signal Processing Conference, Florence, Italy, 4–8 September 2006; pp. 1–6. [Google Scholar]
- Kristem, V.; Molisch, A.F.; Niranjayan, S.; Sangodoyin, S. Coherent UWB Ranging in the Presence of Multiuser Interference. IEEE Trans. Wirel. Commun. 2014, 13, 4424–4439. [Google Scholar] [CrossRef]
- Ding, H.; Liu, W.; Huang, X.; Zheng, L. First Path Detection Using Rank Test in IR UWB Ranging with Energy Detection Receiver under Harsh Environments. IEEE Commun. Lett. 2013, 17, 761–764. [Google Scholar] [CrossRef]
- Giorgetti, A.; Chiani, M. Time-of-Arrival Estimation Based on Information Theoretic Criteria. IEEE Trans. Signal Process. 2013, 61, 1869–1879. [Google Scholar] [CrossRef]
- Van Nguyen, T.; Jeong, Y.; Shin, H.; Win, M.Z. Machine Learning for Wideband Localization. IEEE J. Sel. Areas Commun. 2015, 33, 1357–1380. [Google Scholar] [CrossRef]
- Savic, V.; Larsson, E.G.; Ferrer-Coll, J.; Stenumgaard, P. Kernel Methods for Accurate UWB-Based Ranging with Reduced Complexity. IEEE Trans. Wirel. Commun. 2016, 15, 1783–1793. [Google Scholar] [CrossRef]
- Savic, V.; Ferrer-Coll, J.; Ängskog, P.; Chilo, J.; Stenumgaard, P.; Larsson, E.G. Measurement Analysis and Channel Modeling for TOA-Based Ranging in Tunnels. IEEE Trans. Wirel. Commun. 2015, 14, 456–467. [Google Scholar] [CrossRef]
- Bazzi, A.; Slock, D.T.M.; Meilhac, L. Efficient Maximum Likelihood Joint Estimation of Angles and Times of Arrival of Multiple Paths. In Proceedings of the 2015 IEEE Globecom Workshops (GC Wkshps), San Diego, CA, USA, 6–10 December 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, Q.; Fan, R.; Zhang, N. Match-Filtering Based TOA Estimation for IR-UWB Ranging Systems. In Proceedings of the 2008 International Wireless Communications and Mobile Computing Conference, Crete, Greece, 6–8 August 2008; pp. 1099–1105. [Google Scholar] [CrossRef]
- Liu, Q.; Zhao, Y.; Yin, Z.; Wu, Z. WDMA-UWB Indoor Positioning Through Channel Classification-Based NLOS Mitigation Approach. IEEE Sens. J. 2024, 24, 28995–29005. [Google Scholar] [CrossRef]
- Yang, S.; Shi, D.; Peng, Y.; Qin, W.; Zhang, Y. Joint Communication-Motion Planning for UAV Relaying in Urban Areas. In Proceedings of the 2021 18th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Virtual, 6–9 July 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Watanabe, T.; Nishimori, K. Channel Capacity of Millimeter-Wave Communication System Using Drone Relay Stations. In Proceedings of the 2022 IEEE International Workshop on Electromagnetics: Applications and Student Innovation Competition (iWEM), Narashino, Japan, 29–31 August 2022; pp. 19–20. [Google Scholar] [CrossRef]
- Gan, Z.; Cox, M.; Dong, Y. On RIS-aided NLOS Underwater Wireless Optical Communication Systems. In Proceedings of the 2024 Photonics & Electromagnetics Research Symposium (PIERS), Chengdu, China, 20 January 2024; pp. 1–7. [Google Scholar] [CrossRef]
- Yuan, Y.; He, R.; Ai, B.; Zhang, Z.; Jin, Y. RIS-Assisted Mobile Channels with Directional Transmission: Modeling and Characteristic Analysis. IEEE Trans. Wirel. Commun. 2024, 1. [Google Scholar] [CrossRef]
- Kim, K.J.; Liu, H.; Wen, M.; Tsiftsis, T.A.; Orlik, P.V.; Poor, H.V. QR Decomposition-Based Cyclic Prefixed Single-Carrier Transmissions for Cooperative Communications: Concepts and Research Landscape. IEEE Commun. Surv. Tutor. 2023, 25, 133–155. [Google Scholar] [CrossRef]
- Bishnu, A.; Bhatia, V. On performance analysis of IEEE 802.22 (PHY) for COST-207 channel models. In Proceedings of the 2015 IEEE Conference on Standards for Communications and Networking (CSCN), Tokyo, Japan, 28–30 October 2015; pp. 229–234. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, C.X.; Hua, B.; Kai, M.; Jiang, S.; Yao, M. 3GPP TR 38.901 Channel Model. In Wiley 5G Ref; Tafazolli, R., Wang, C.-L., Chatzimisios, P., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2022. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Settings |
|---|---|
| Modulation type | QPSK |
| Preambles type | Zadoff–Chu Sequences |
| The length of preambles (M) | 128 |
| The length of data (N) | 1024 |
| FFT Size | 128/1024 |
| The length of CP (C) | 64 |
| The length of CS (D) | 0 or 64 |
| Channel Model | Rice/Rayleigh fading channel with 8 non-zero taps |
| 20 dB |
| Parameters | Channel 1 | Channel 2 | Channel 3 |
|---|---|---|---|
| E | 0 | 28 | 60 |
| F | 51 | 32 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Xiang, X.; Wang, R.; Dong, P.; Li, Q. A Design of NLOS Communication Scheme Based on SC-FDE with Cyclic Suffix for UAV Payload Communication. Drones 2024, 8, 648. https://doi.org/10.3390/drones8110648
Wang P, Xiang X, Wang R, Dong P, Li Q. A Design of NLOS Communication Scheme Based on SC-FDE with Cyclic Suffix for UAV Payload Communication. Drones. 2024; 8(11):648. https://doi.org/10.3390/drones8110648
Chicago/Turabian StyleWang, Peng, Xin Xiang, Rui Wang, Pengyu Dong, and Qiao Li. 2024. "A Design of NLOS Communication Scheme Based on SC-FDE with Cyclic Suffix for UAV Payload Communication" Drones 8, no. 11: 648. https://doi.org/10.3390/drones8110648
APA StyleWang, P., Xiang, X., Wang, R., Dong, P., & Li, Q. (2024). A Design of NLOS Communication Scheme Based on SC-FDE with Cyclic Suffix for UAV Payload Communication. Drones, 8(11), 648. https://doi.org/10.3390/drones8110648