
Air Route Design of Multi-Rotor UAVs for Urban Air Mobility




Abstract
1. Introduction
- (1)
- The three-dimensional configuration of the UAV is simplified by constructing a UAV-protected zone, and the design concept of flight leg and intersection is proposed based on layered airspace. Two types of intersections, along-road and roundabout, are proposed, their characteristic parameters are defined in detail, and flight procedures such as flying into, turning, lifting and flying out are designed, which provides a complete specification system for route operation.
- (2)
- The UAV conflict risk and intersection service level metrics are defined respectively from two aspects of safety and efficiency. For two-road, three-road, and four-road intersections, the UAV operation situation of along-road and roundabout intersections is quantitatively analyzed through simulation experiments, and the performance characteristics and applicable scenarios of various types of intersections are analyzed, which provides a reference for optimizing the route network topology and traffic flow configuration.
2. Problem Statement
2.1. Concept of UAV Route
- (1)
- Security. Security is the lifeline of urban airspace. Flying along routes at low-altitude in the city, UAVs need to avoid space entities such as buildings and trees. At the same time, UAVs should also be kept at a safety separation from other UAVs to avoid collisions.
- (2)
- Publicity. Air routes serve the public and should be able to meet the demands of various UAV operation scenarios, such as logistics, tourism and daily commuting.
- (3)
- Flexibility. In the urban low-altitude airspace, there are unexpected events such as equipment failure and bad weather. It is necessary to pay timely attention to the changes in the internal and external environment of the UAV, adjust the air route as required, and coordinate the orderly flight of the UAV.
- (4)
- Economy. Under the premise of satisfying safety, the demands of multiple stakeholders should be taken into consideration as much as possible to obtain the best benefits with less investment and make the limited airspace resources more effective.
- (1)
- Airline. The given route was developed in the flight plan before the UAV mission with temporal and spatial certainty.
- (2)
- Track. The actual flight trajectory of the UAV has spatial and temporal uncertainty due to the influence of random factors such as weather and navigation.
- (3)
- Leg. As a route component, a leg is defined as a section between two nodes, and a route may contain more than one leg.
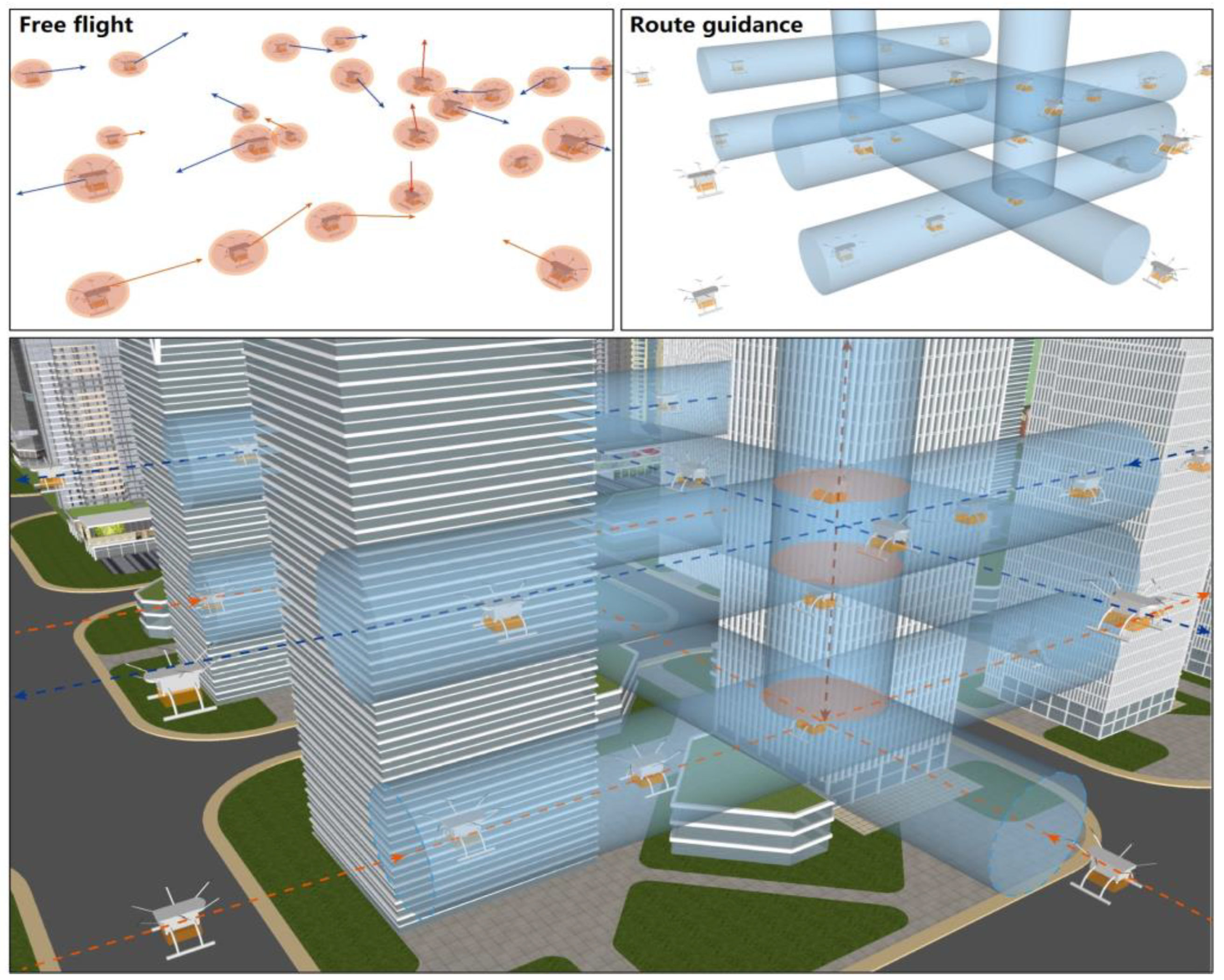
2.2. Operational Modes
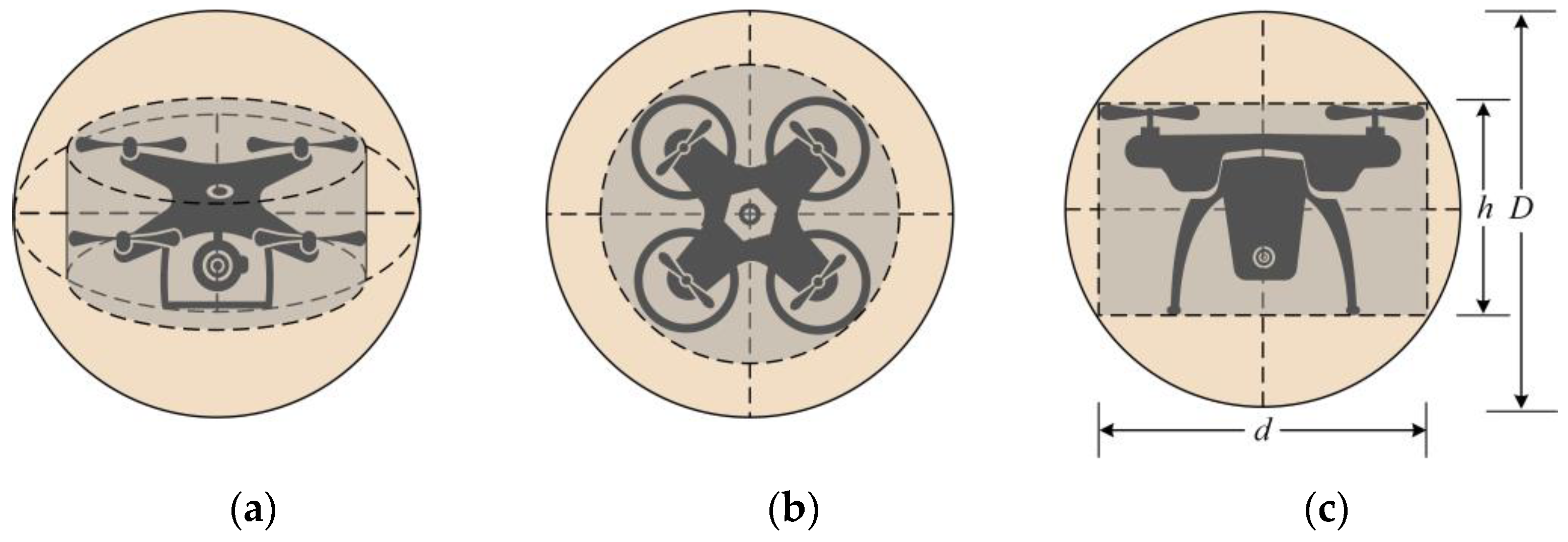
2.3. Protected Zone Model
3. Air Route Design
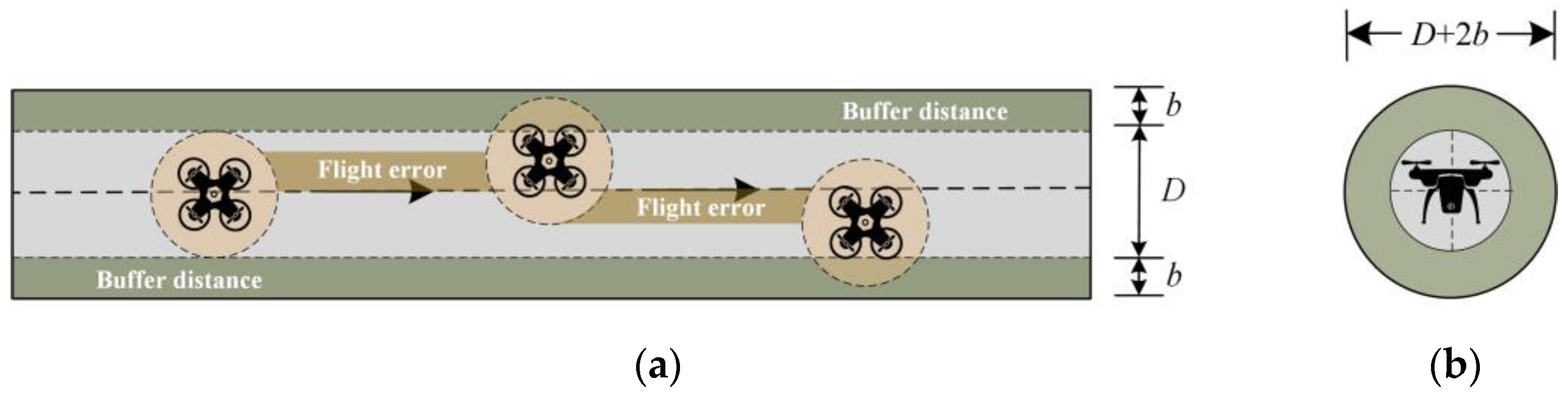
3.1. Leg
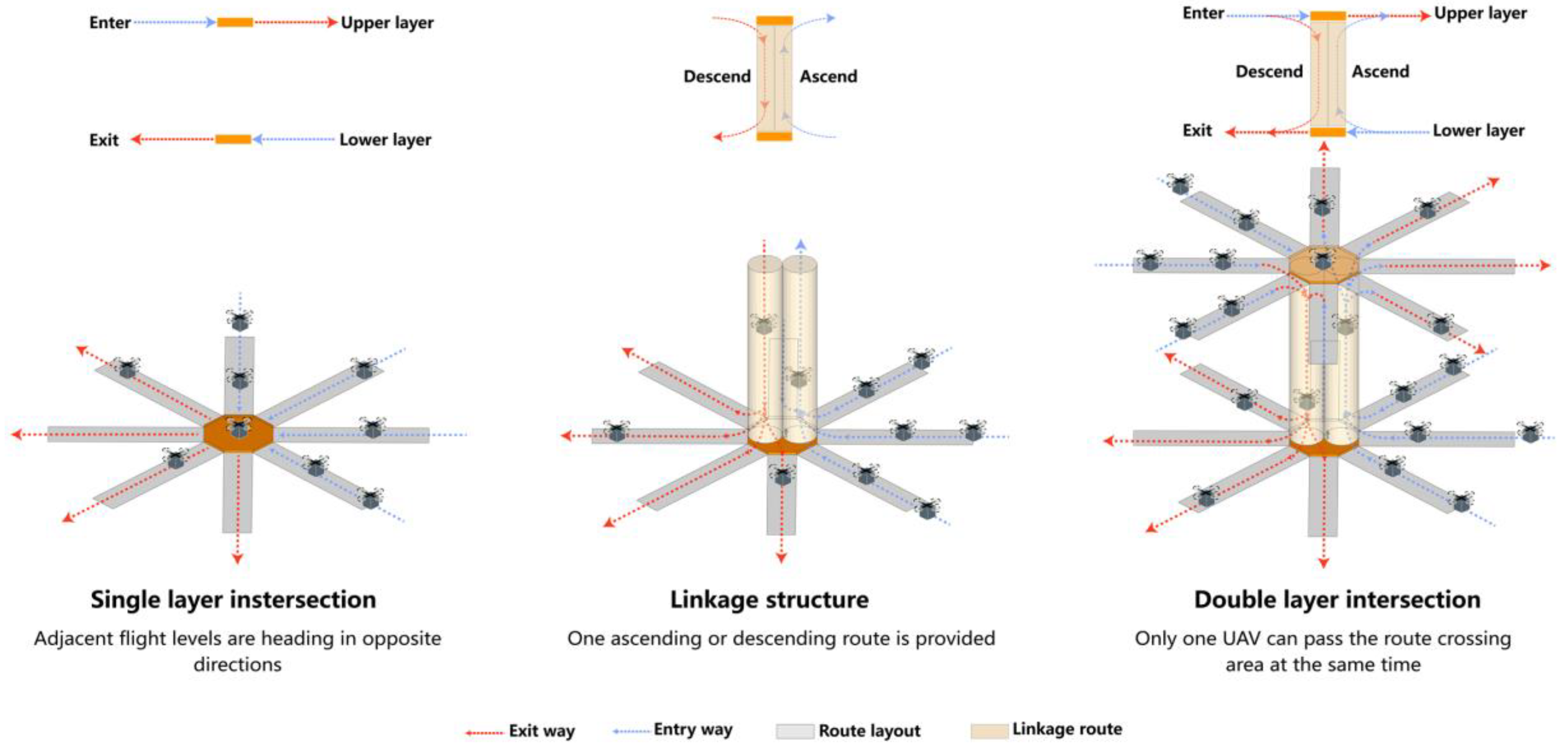
3.2. Intersection
4. Intersection Model
4.1. Along-Road Type
4.1.1. Operation Concept
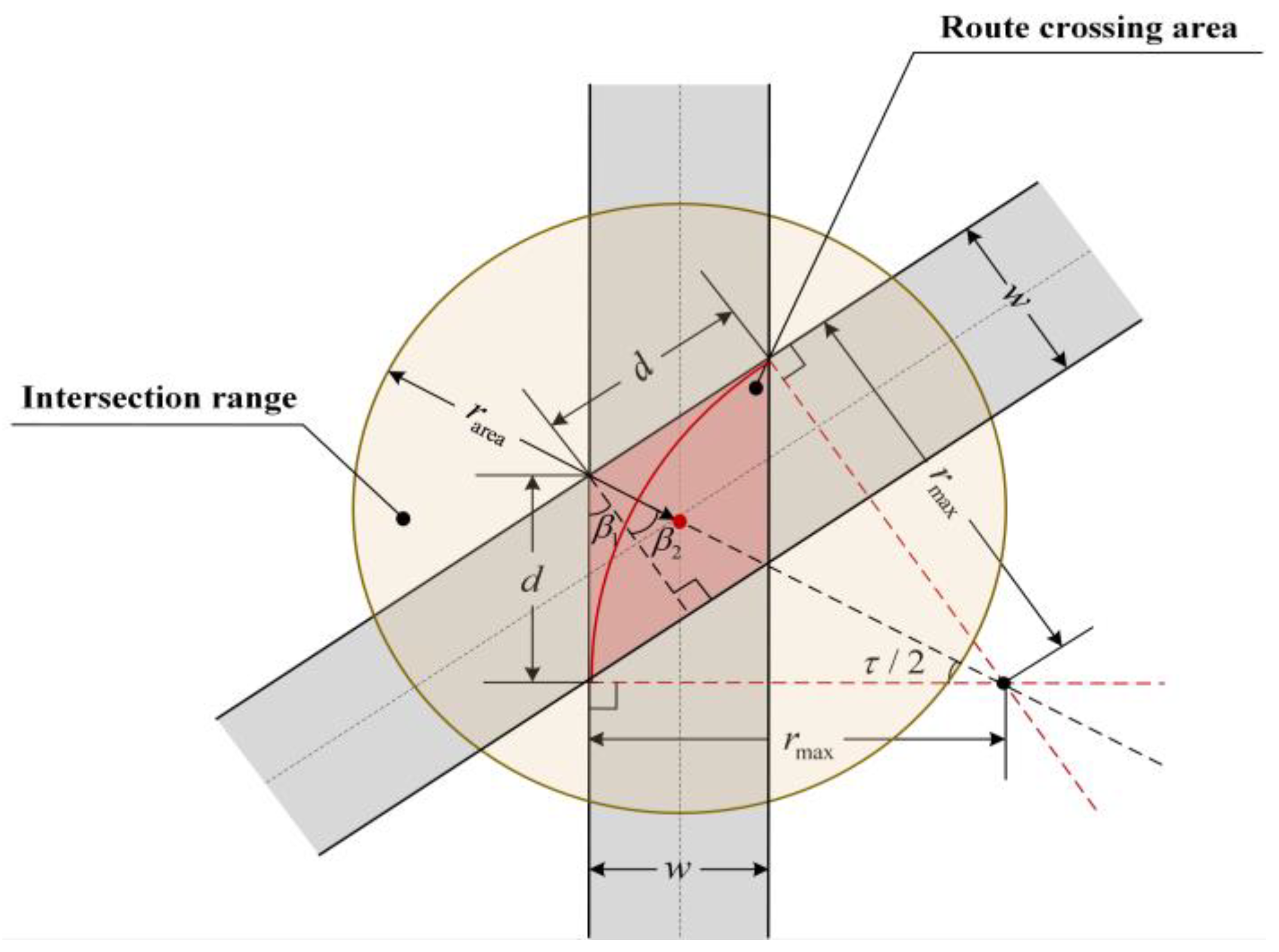
4.1.2. Characteristic Parameters
- (1)
- Route-crossing area
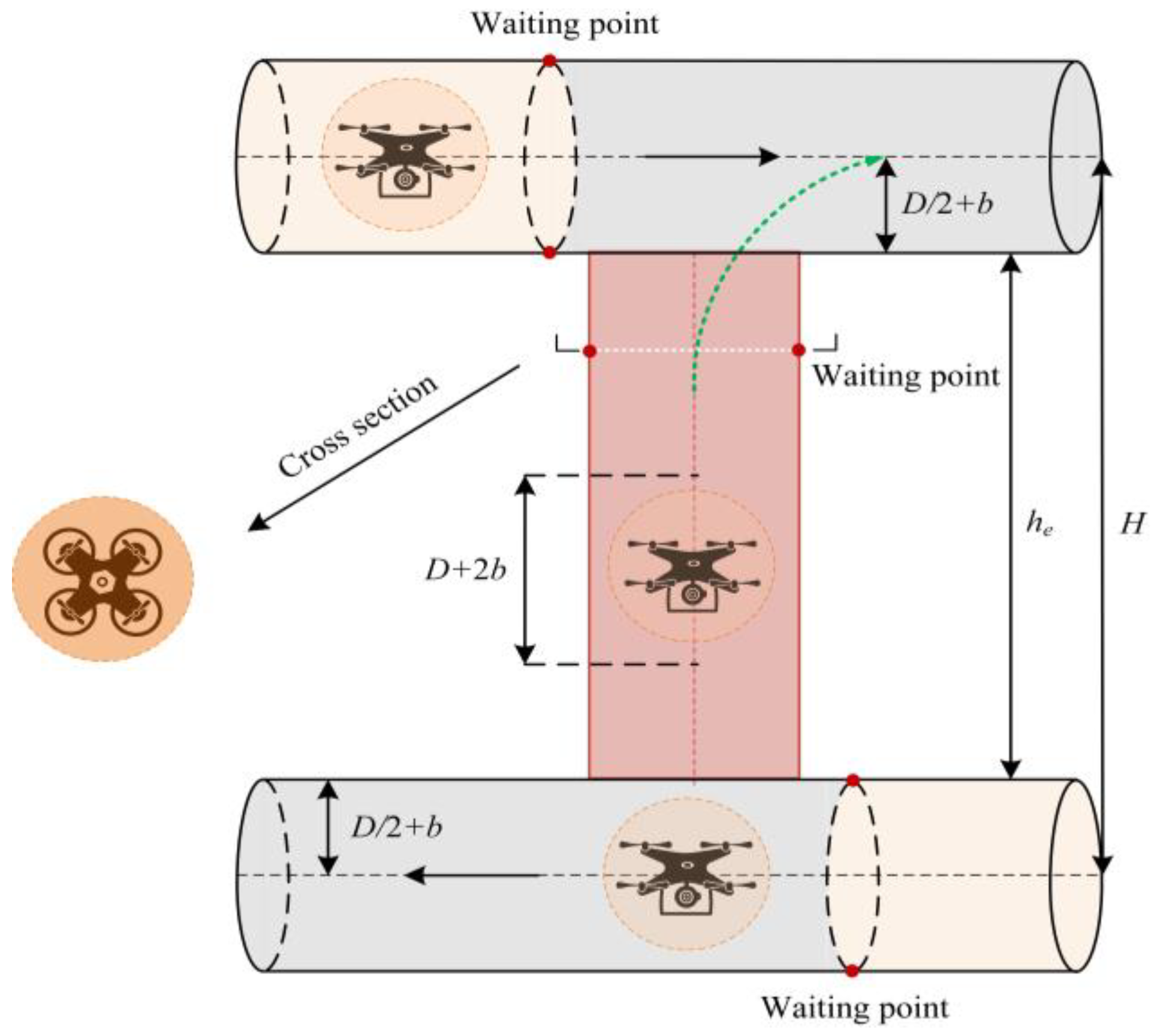
- (2)
- Elevator
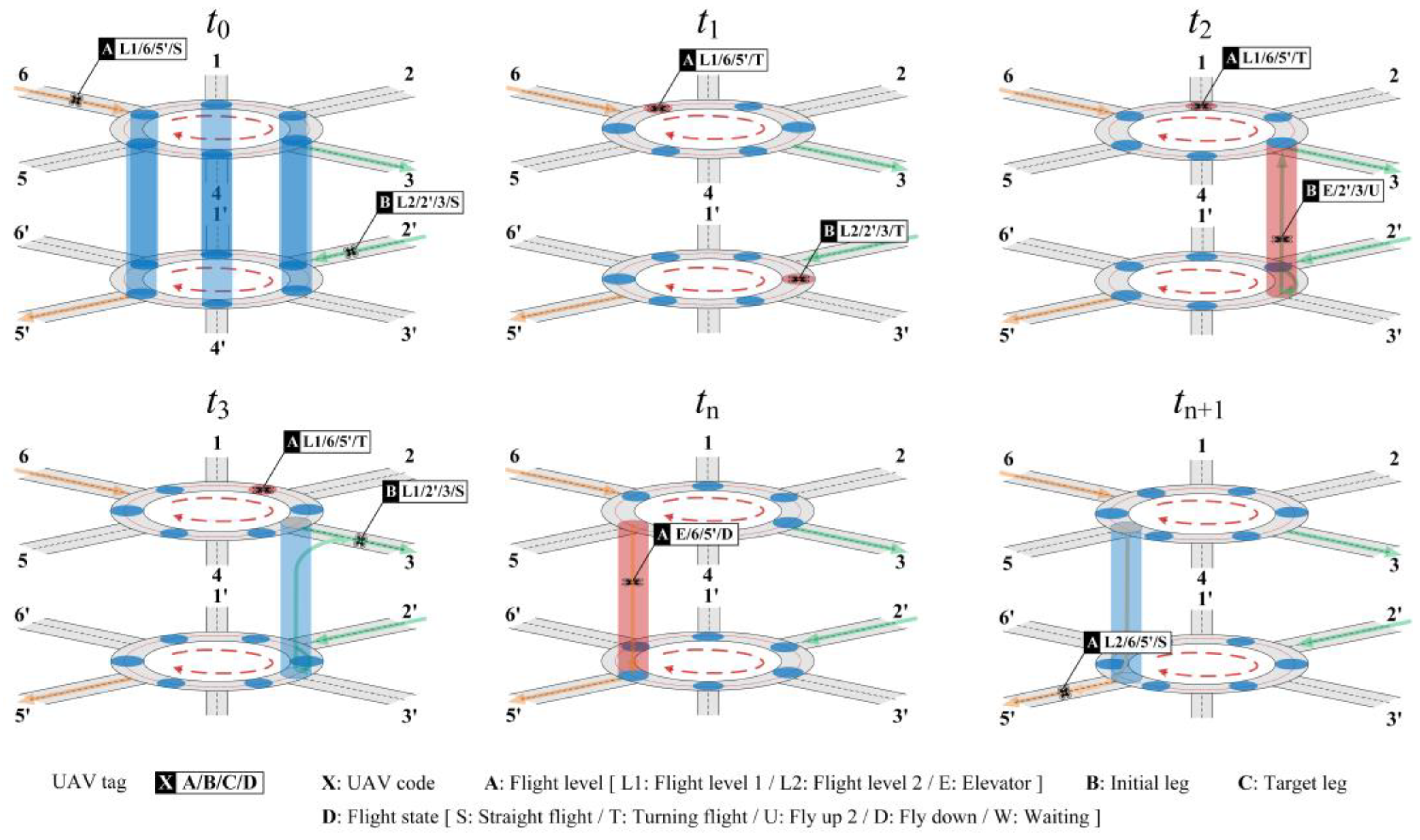
4.1.3. Flight Procedures
- (1)
- Fly into
- (2)
- Turning
- (3)
- Lifting
- (4)
- Fly out
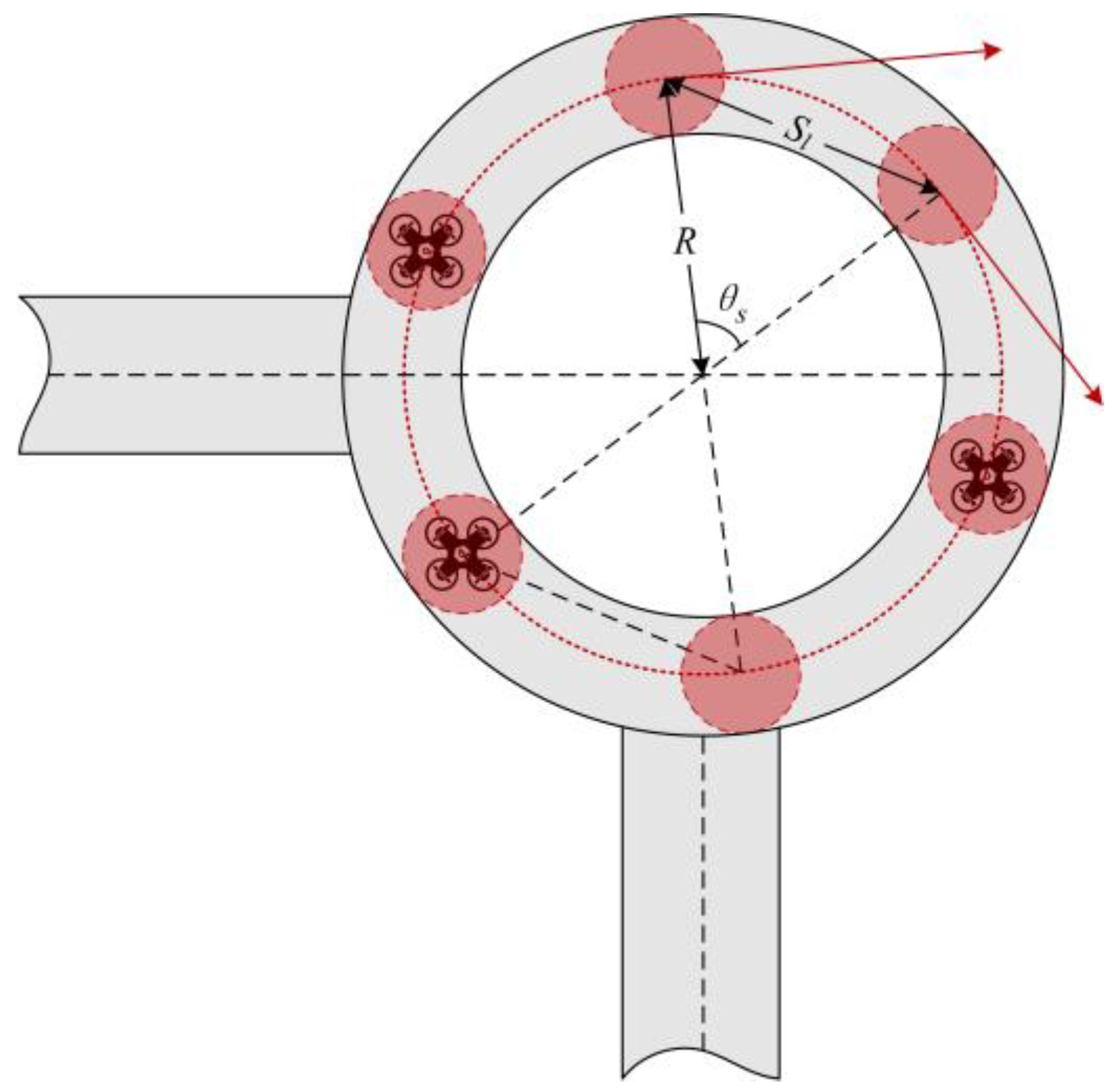
4.2. Roundabout Type
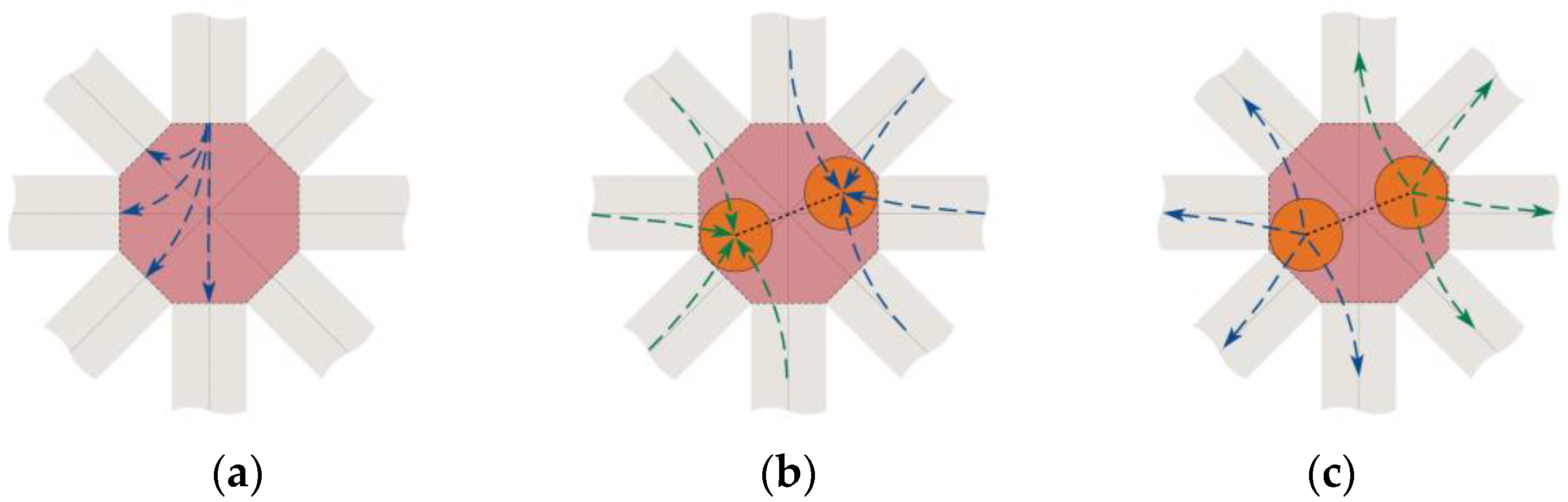
4.2.1. Operation Concept
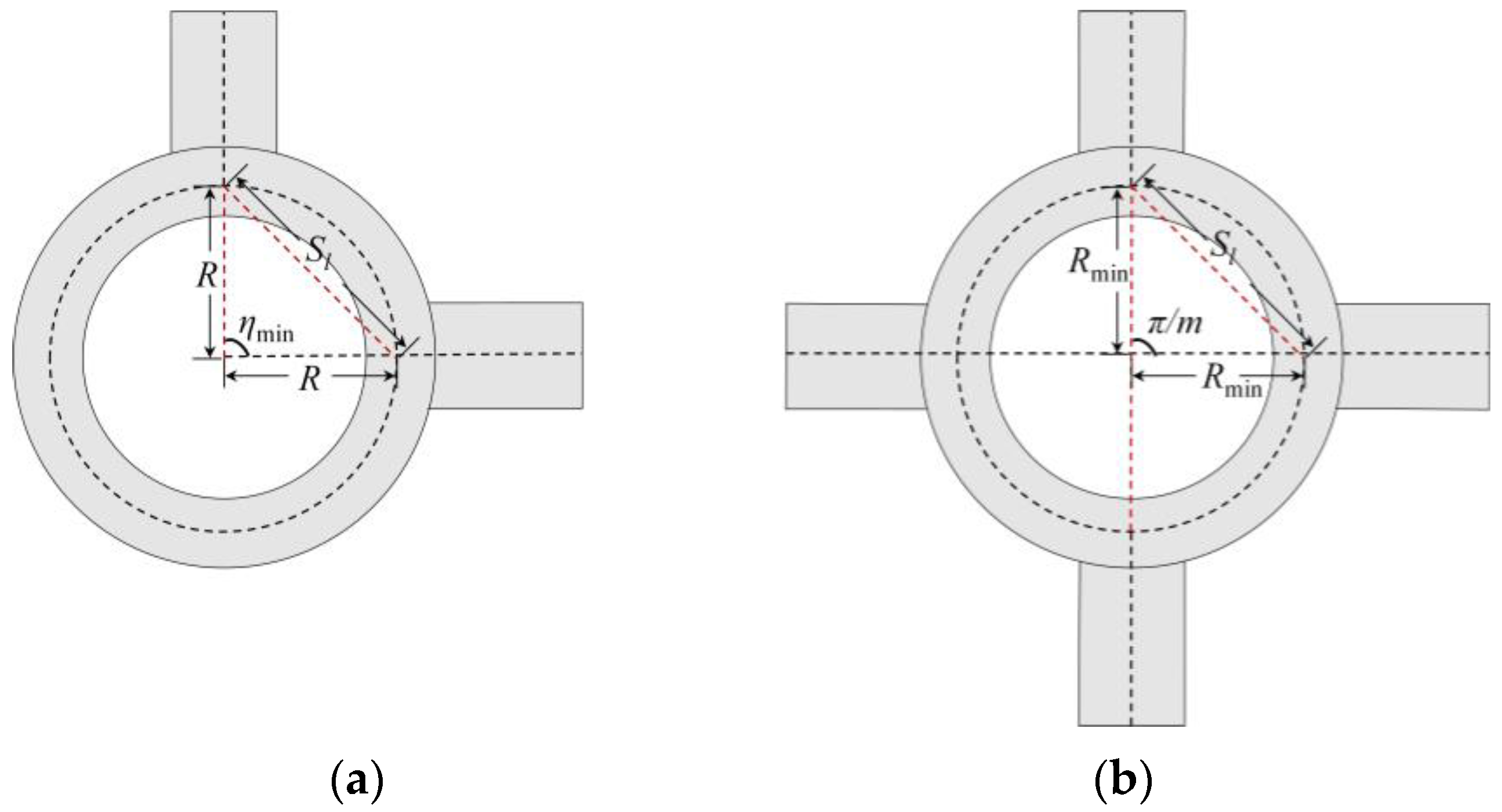
4.2.2. Characteristic Parameters
- (1)
- Roundabout radius
- (2)
- Rotate seat
- (3)
- Elevator
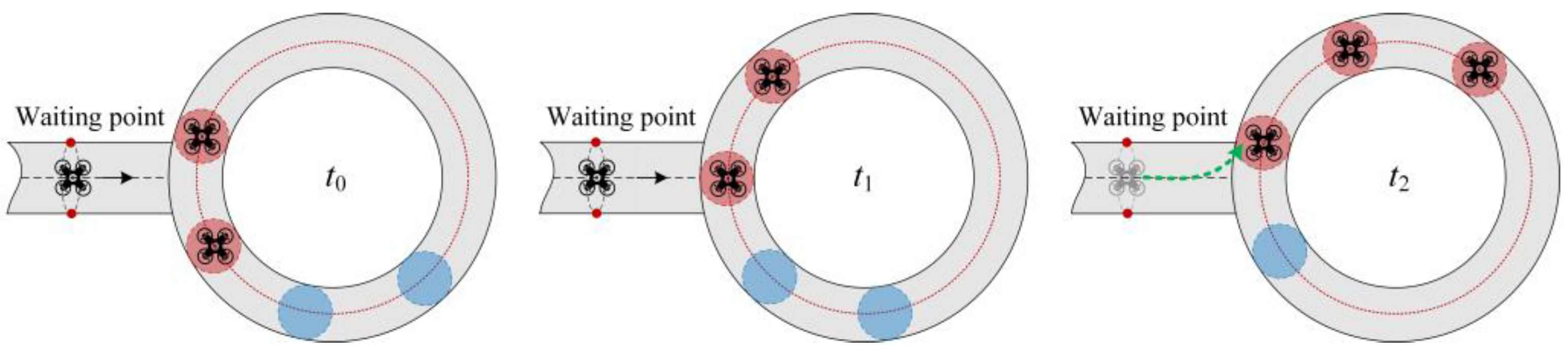
4.2.3. Flight Procedures
- (1)
- Fly into
- (2)
- Turning
- (3)
- Lifting
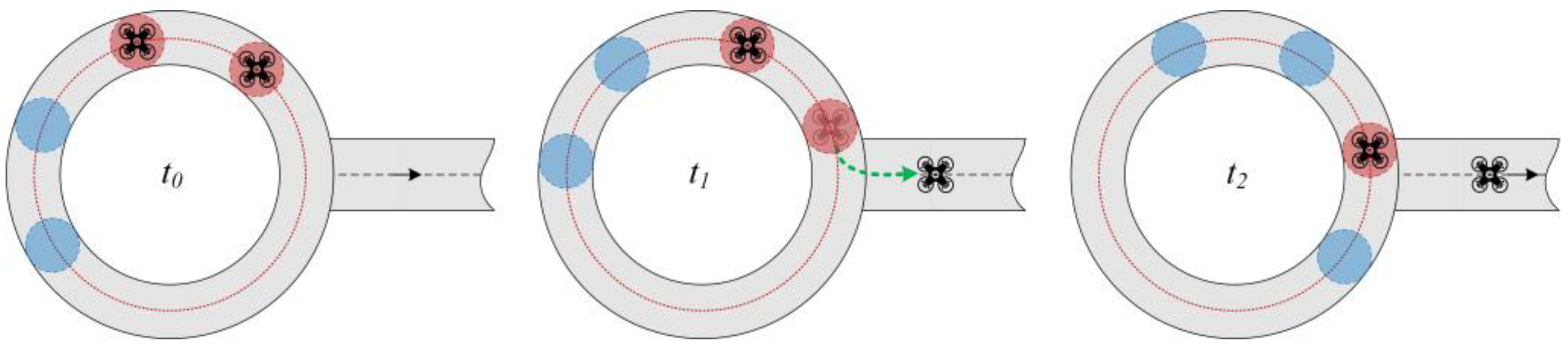
- (4)
- Fly-out
5. Operation Evaluation
- (1)
- Conflict risk
- (2)
- Service level
6. Simulation Experiments
6.1. Scenario Setting
6.2. Experimental Design
6.3. Result Analysis
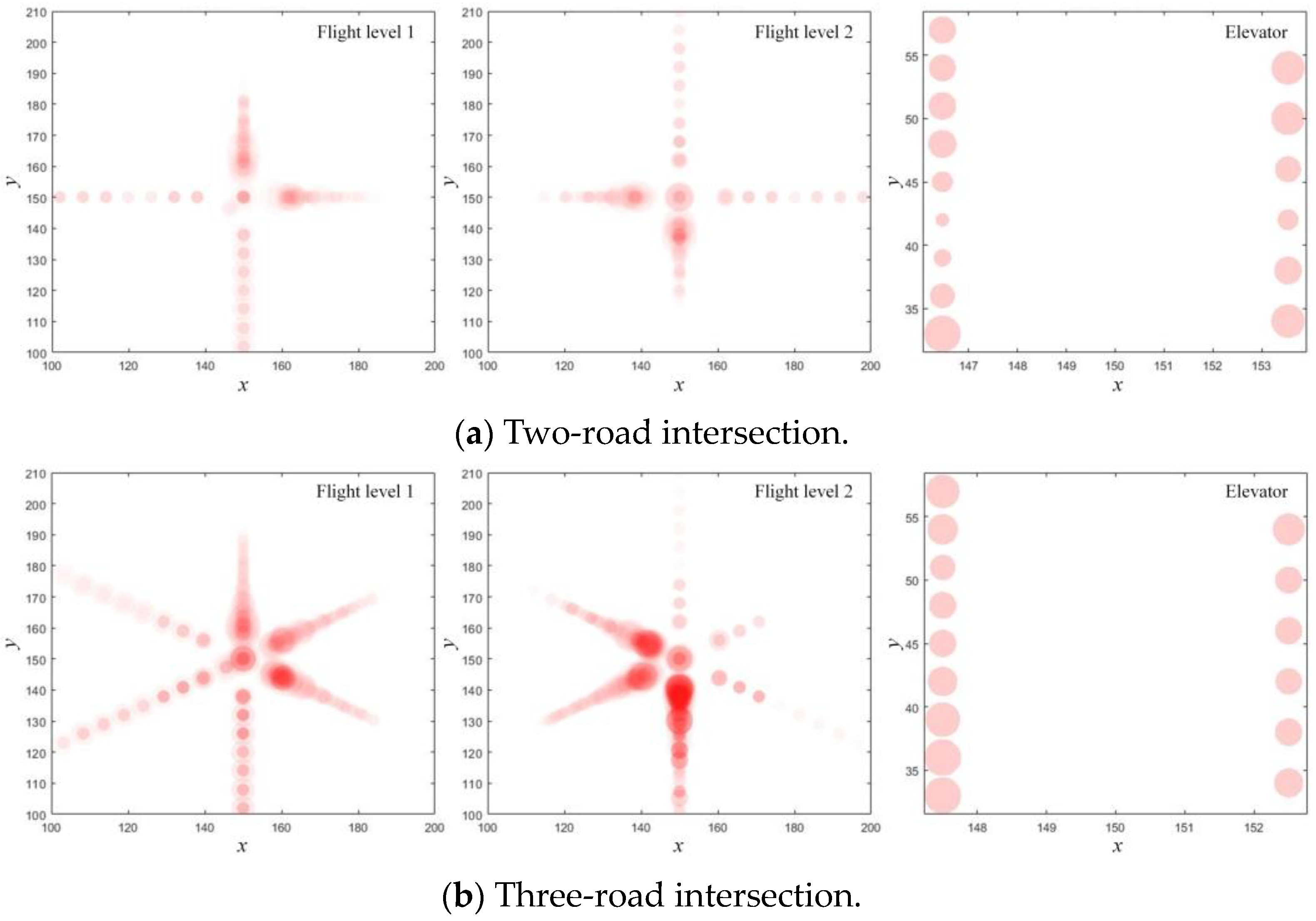
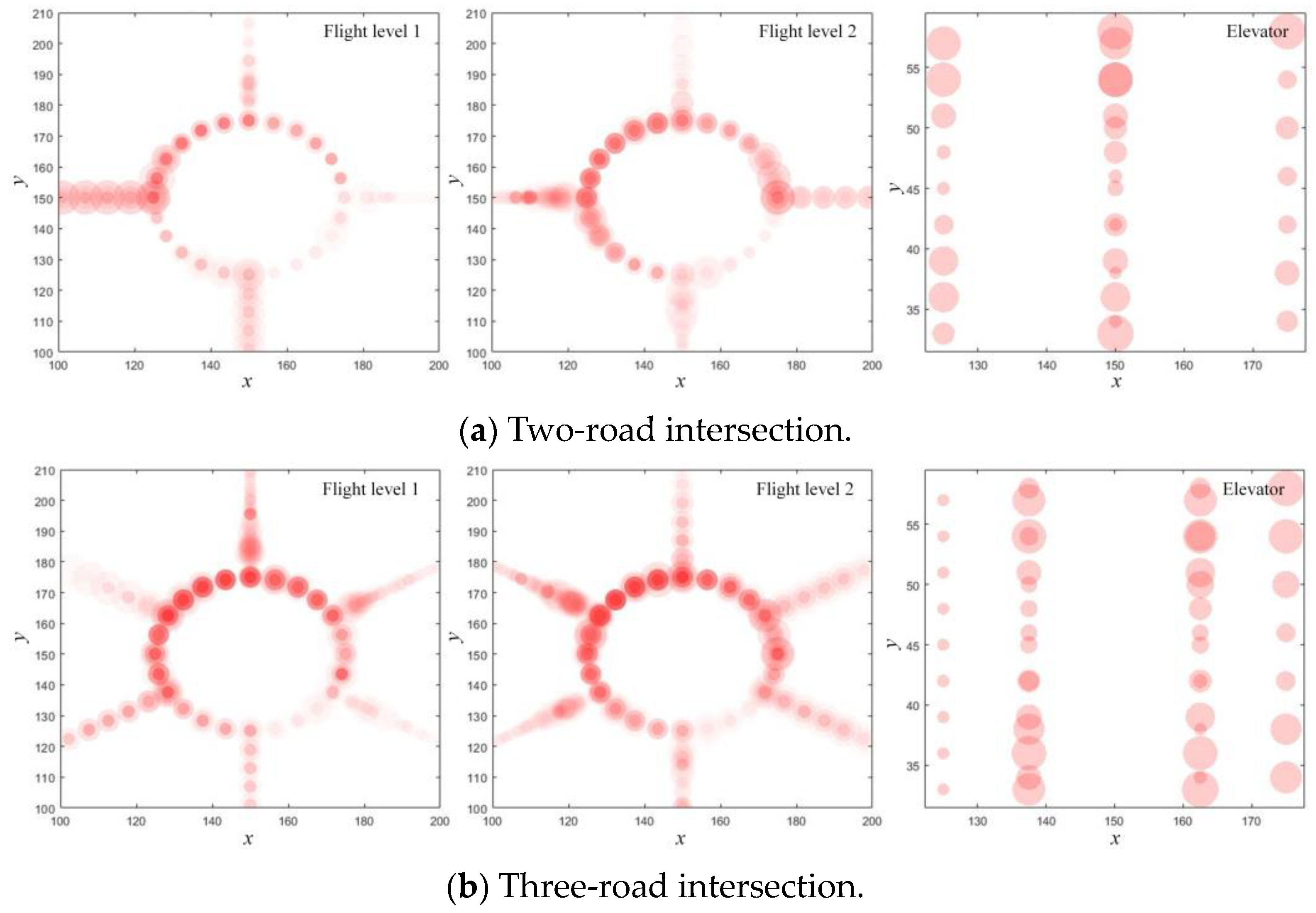
6.3.1. Security Analysis
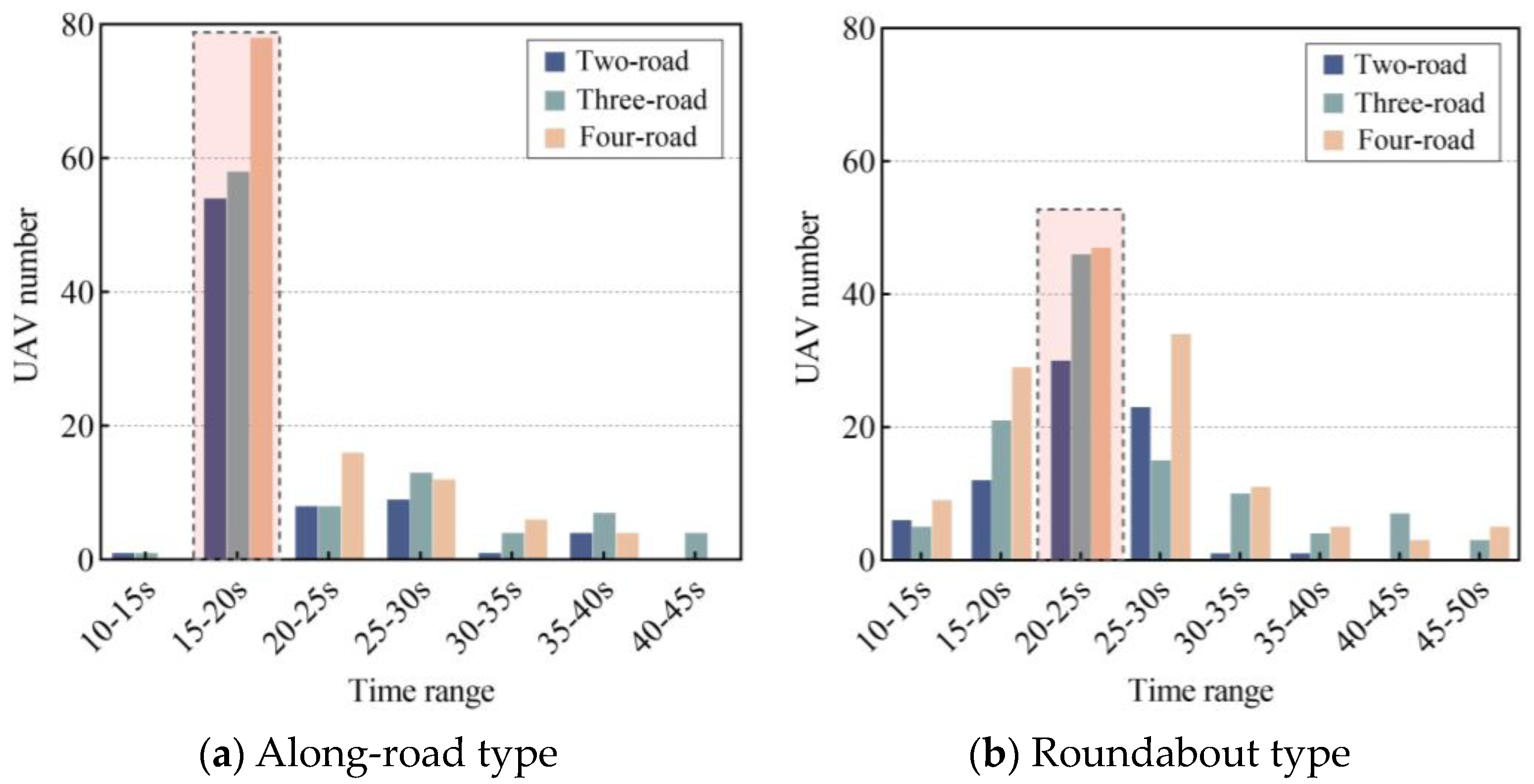
6.3.2. Efficiency Analysis
6.3.3. Randomness Analysis
7. Conclusions
- (1)
- The traffic management strategies for intersections are proposed, including operation concepts, characteristic parameters, and flight procedures, and traffic flow characteristics in urban UAV transportation scenarios are simulated through experiments. The results show that there is a positive correlation between the number of UAVs at intersections and the conflict risk, and the more crossing routes, the stronger the correlation. The number of crossing routes is negatively correlated with the intersection passing rate, and the intersection average passing time shows a growing trend with the growth of the UAV arrival rate.
- (2)
- The influence of the number of routes on the operation situation of intersections is analyzed from two aspects: safety and efficiency. When the number of routes connected by the intersection is small, the overall conflict risk of the roundabout type is higher than that of the along-road type, and with the increase in the crossing routes, the overall conflict risk of the along-road type is higher than that of the roundabout type. However, the operational efficiency of the along-road type is higher than that of the roundabout type when the number of crossing routes or UAV arrival rate is low, and the operational efficiency of the traffic circle type is gradually better than that of the along-road type as the number of cross routes or arrival rate grows. The along-road type is suitable for scenarios with fewer crossing routes and relatively sparse UAV traffic, while the roundabout type is more suitable for environments with more crossing routes and dense UAV traffic.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Zou, Y.; Zhang, Q.; Liu, H. Future urban air mobility management: Review. Acta Aeronaut. Astronaut. Sin. 2021, 42, 82–106. [Google Scholar]
- Aslan, S.; Erkin, T. A multi-population immune plasma algorithm for path planning of unmanned combat aerial vehicle. Adv. Eng. Inform. 2023, 55, 101829. [Google Scholar] [CrossRef]
- Li, S.; Zhang, H.; Yi, J.; Liu, H. A bi-level planning approach of logistics unmanned aerial vehicle route network. Aerosp. Sci. Technol. 2023, 141, 108572. [Google Scholar] [CrossRef]
- Li, S.; Zhang, H.; Li, Z.; Liu, H. An air route network planning model of logistics UAV terminal distribution in urban low altitude airspace. Sustainability 2021, 13, 13079. [Google Scholar] [CrossRef]
- Liao, X.; Qu, W.; Xu, C.; He, H.; Wang, J.; Shi, W. A review of urban air mobility and its new infrastructure low-altitude public routes. Aeronaut. Astronaut. Sin. 2023, 44, 6–34. [Google Scholar]
- Zhou, Y.; Su, Y.; Xie, A.; Kong, L. A newly bio-inspired path planning algorithm for autonomous obstacle avoidance of UAV. Chin. J. Aeronaut. 2021, 34, 199–209. [Google Scholar] [CrossRef]
- Wang, S.; Cao, X.; Li, H.; Li, Q.; Hang, X.; Wang, Y. Air route network optimization in fragmented airspace based on cellular automata. Chin. J. Aeronaut. 2017, 30, 1184–1195. [Google Scholar] [CrossRef]
- Niu, Y.; Yan, X.; Wang, Y.; Niu, Y. 3D real-time dynamic path planning for UAV based on improved interfered fluid dynamical system and artificial neural network. Adv. Eng. Inform. 2024, 59, 102306. [Google Scholar] [CrossRef]
- Hu, G.; Du, B.; Chen, K.; Wei, G. Super eagle optimization algorithm based three-dimensional ball security corridor planning method for fixed-wing UAVs. Adv. Eng. Inform. 2024, 59, 102354. [Google Scholar] [CrossRef]
- Gugan, G.; Haque, A. Path planning for autonomous drones: Challenges and future directions. Drones 2023, 7, 169. [Google Scholar] [CrossRef]
- Soltani, A.R.; Tawfik, H.; Goulermas, J.Y.; Fernando, T. Path planning in construction sites: Performance evaluation of the Dijkstra, A*, and GA search algorithms. Adv. Eng. Inform. 2022, 16, 291–303. [Google Scholar] [CrossRef]
- Zhang, H.; Li, H.; Liu, H.; Xu, W.; Zou, Y. Path planning for logistics unmanned aerial vehicle in urban area. J. Transp. Syst. Eng. Inf. Technol. 2020, 20, 22–29. [Google Scholar]
- Shao, Q.; Li, J.; Li, R.; Zhang, J.; Gao, X. Study of urban logistics drone path planning model incorporating service benefit and risk cost. Drones 2022, 6, 418. [Google Scholar] [CrossRef]
- Phung, M.D.; Ha, Q.P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]
- Jiang, W.; Lyu, Y.; Li, Y.; Guo, Y.; Zhang, W. UAV path planning and collision avoidance in 3D environments based on POMPD and improved grey wolf optimizer. Aerosp. Sci. Technol. 2022, 121, 107314. [Google Scholar] [CrossRef]
- Aslan, S. An immune plasma algorithm with a modified treatment schema for UCAV path planning. Eng. Appl. Artif. Intel. 2022, 112, 104789. [Google Scholar] [CrossRef]
- Dai, R.; Fotedar, S.; Radmanesh, M.M. Kumar, Quality-aware UAV coverage and path planning in geometrically complex environments. Ad Hoc Netw. 2018, 73, 95–105. [Google Scholar] [CrossRef]
- Patley, A.; Bhatt, A.; Maity, A.; Kumar, S.R.; Das, K. Modified particle swarm optimization based path planning for multi-UAV formation. In Proceedings of the AIAA SciTech Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Gharibi, M.; Boutaba, R.; Waslander, S.L. Internet of drones. IEEE Access 2016, 4, 1148–1162. [Google Scholar] [CrossRef]
- Xu, C. Planning and Construction of the Low-Altitude Public Air Route Network of UAVs by Remote Sensing Data and Geographical Information Technology. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, 2020. [Google Scholar]
- Quan, Q.; Li, M.; Fu, R. Sky highway design for dense traffic. IFAC-PapersOnLine 2021, 54, 140–145. [Google Scholar] [CrossRef]
- Jang, D.S.; Ippolito, C.; Sankararaman, S.; Stepanyan, V. Concepts of airspace structures and system analysis for UAS traffic flows for urban areas. In Proceedings of the AIAA Information Systems-AIAA Infotech@Aerospace, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Lowry, M.R. Towards high density urban air mobility. In Proceedings of the Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.M.; Maas, J. Three-dimensional conflict count models for unstructured and layered airspace designs. Transp. Res. Part C Emerg. Technol. 2018, 95, 295–319. [Google Scholar] [CrossRef]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.; Vidosavljevic, A.; Arntzen, M.; Bussink, F.; Nieuwenhuisen, D. Analysis of airspace structure and capacity for decentralized separation using fast-time simulations. J. Guid. Control Dyn. 2017, 40, 38–51. [Google Scholar] [CrossRef]
- Arntzen, M.; Aalmoes, R.; Bussink, F.J.L.; Sunil, E.; Hoekstra, J. Noise Computation for Future Urban Air Traffic Systems; Report No.: NLR-TP-2015-289; National Aerospace Laboratory: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Reich, P.G. Analysis of long-range air traffic systems: Separation standards—I. J. Nav. 1966, 19, 88–98. [Google Scholar] [CrossRef]
- Brooker, P. Lateral collision risk in air traffic track systems: A ‘Post-Reich’ event model. J. Nav. 2003, 56, 399–409. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, H.; Zhong, G.; Liu, H.; Feng, D. Collision probability estimation for small unmanned aircraft systems. Reliab. Eng. Syst. Saf. 2021, 213, 107619. [Google Scholar] [CrossRef]
- Nguyen, D.D.; Rohacs, J.; Rohacs, D. Autonomous flight trajectory control system for drones in smart city traffic management. ISPRS Int. J. Geo-Inf. 2021, 10, 338. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, H.; Feng, D.; Liu, H.; Zhong, G. Fast collision detection for small unmanned aircraft systems in urban airspace. IEEE Access 2021, 9, 16630–16641. [Google Scholar] [CrossRef]
- DJI-Innovations. Support for Mavic 2. 2024. Available online: https://www.dji.com/hk-en/support/product/mavic-2 (accessed on 12 June 2024).
- DJI-Innovations, Inspire 2 Specs. 2024. Available online: https://www.dji.com/hk-en/inspire-2/specs (accessed on 12 June 2024).
- DJI-Innovations, Matrice 300 RTK Specs. 2024. Available online: https://enterprise.dji.com//hk-en/matrice-300/specs (accessed on 12 June 2024).
- Zou, Y. Research on the Demarcation Method of Safe Separation for Unmanned Aerial Vehicle in Future Smart Cities. Master’s Thesis, University of Aeronautics and Astronautics, Nanjing, China, 2021. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rotate Seat Code | t0 | t1 | ⋯⋯ | tn | ||||
|---|---|---|---|---|---|---|---|---|
| Position | Status | Position | Status | Position | Status | Position | Status | |
| 1 | x1(t0),y1(t0),z1(t0) | 0 | x1(t1),y1(t1),z1(t1) | 1 | ⋯⋯ | ⋯⋯ | x1(tn),y1(tn),z1(tn) | 1 |
| 2 | x2(t0),y2(t0),z2(t0) | 1 | x2(t1),y2(t1),z2(t1) | 0 | ⋯⋯ | ⋯⋯ | x2(tn),y2(tn),z2(tn) | 0 |
| 3 | x3(t0),y3(t0),z3(t0) | 1 | x3(t1),y3(t1),z3(t1) | 1 | ⋯⋯ | ⋯⋯ | x3(tn),y3(tn),z3(tn) | 0 |
| ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ |
| n | xn(t0),yn(t0),zn(t0) | 1 | xn(t1),yn(t1),zn(t1) | 1 | ⋯⋯ | ⋯⋯ | xn(tn),yn(tn),zn(tn) | 0 |
| Type | Mavic Air 2 | Inspire 2 | M300 RTK |
| Mavic Air 2 | Vertical: 2 m Horizontal: 10 m | Vertical: 2 m Horizontal: 15 m | Vertical: 3 m Horizontal: 20 m |
| Inspire 2 | Vertical: 2 m Horizontal: 15 m | Vertical: 1 m Horizontal: 15 m | Vertical: 2 m Horizontal: 20 m |
| M300 RTK | Vertical: 3 m Horizontal: 15 m | Vertical: 2 m Horizontal: 10 m | Vertical: 2 m Horizontal: 25 m |
| Type | Along-Road | Roundabout | ||||
|---|---|---|---|---|---|---|
| Mean Risk | Mean UAV Number | Relative Coefficient | Mean Risk | Mean UAV Number | Relative Coefficient | |
| Two-road | 0.02% | 3.4 | 0.31 | 0.05% | 6 | 0.38 |
| Three-road | 0.06% | 6.2 | 0.53 | 0.07% | 8.5 | 0.56 |
| Four-road | 0.36% | 15.6 | 0.73 | 0.11% | 11.5 | 0.67 |
| Arrival Rate (veh/min) | Along-Road Type Average Passing Time (s) | Roundabout Type Average Passing Time (s) | ||||
|---|---|---|---|---|---|---|
| Two-Road | Three-Road | Four-Road | Two-Road | Three-Road | Four-Road | |
| 1 | 17.39 | 18.63 | 23.65 | 19.48 | 22.5 | 22.66 |
| 1.5 | 18.64 | 18.98 | 23.87 | 20.22 | 23.63 | 23 |
| 2 | 19.37 | 21.28 | 24.25 | 20.54 | 23.91 | 23.07 |
| 2.5 | 19.73 | 21.54 | 24.34 | 20.63 | 24.1 | 23.36 |
| 3 | 20.55 | 22.71 | 24.72 | 20.88 | 24.27 | 23.72 |
| 3.5 | 21.22 | 23.03 | 26.72 | 21.04 | 24.55 | 24.08 |
| 4 | 21.24 | 23.27 | 27.61 | 21.25 | 25.03 | 24.73 |
| 4.5 | 21.6 | 23.47 | 31.15 | 22.14 | 25.06 | 25.04 |
| 5 | 21.77 | 23.49 | 31.25 | 22.39 | 25.13 | 25.91 |
| 5.5 | 21.96 | 23.63 | 38.1 | 23.09 | 25.5 | 26.04 |
| 6 | 22.85 | 26.05 | 44.13 | 23.24 | 25.67 | 26.79 |
| Type | Average Passing Time (s) | Average Passing Rate | |
|---|---|---|---|
| Along-road | Two-road | 20.58 | 67.98% |
| Three-road | 23.25 | 44.52% | |
| Four-road | 23.81 | 30.19% | |
| Roundabout | Two-road | 23.3 | 59.55% |
| Three-road | 24 | 40.38% | |
| Four-road | 23.92 | 37.21% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Zhang, H.; Li, Z.; Liu, H. Air Route Design of Multi-Rotor UAVs for Urban Air Mobility. Drones 2024, 8, 601. https://doi.org/10.3390/drones8100601
Li S, Zhang H, Li Z, Liu H. Air Route Design of Multi-Rotor UAVs for Urban Air Mobility. Drones. 2024; 8(10):601. https://doi.org/10.3390/drones8100601
Chicago/Turabian StyleLi, Shan, Honghai Zhang, Zhuolun Li, and Hao Liu. 2024. "Air Route Design of Multi-Rotor UAVs for Urban Air Mobility" Drones 8, no. 10: 601. https://doi.org/10.3390/drones8100601
APA StyleLi, S., Zhang, H., Li, Z., & Liu, H. (2024). Air Route Design of Multi-Rotor UAVs for Urban Air Mobility. Drones, 8(10), 601. https://doi.org/10.3390/drones8100601