
Evolution of Unmanned Surface Vehicle Path Planning: A Comprehensive Review of Basic, Responsive, and Advanced Strategic Pathfinders

 , ,
, ,  ,
,  ,
,  , and
, and 
Abstract
1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elements | UAVs [20] | UGVs [21] | USVs [22] |
|---|---|---|---|
| Motion Speed and Inertia | Fast, Low Inertia | Moderate, High Inertia | Moderate, High Inertia |
| Significant Disturbance | Wind | Traffic, Pavement | Waves, Wind |
| Operating Environments | Expansive Airspace | Road Networks | Aquatic Environments |
| Response Time | Short | Short | Extended |
| Application Scenarios | Remote Sensing, Communications, Surveillance | Automation, Logistics, Rescue | Oceanography, Environmental Monitoring |
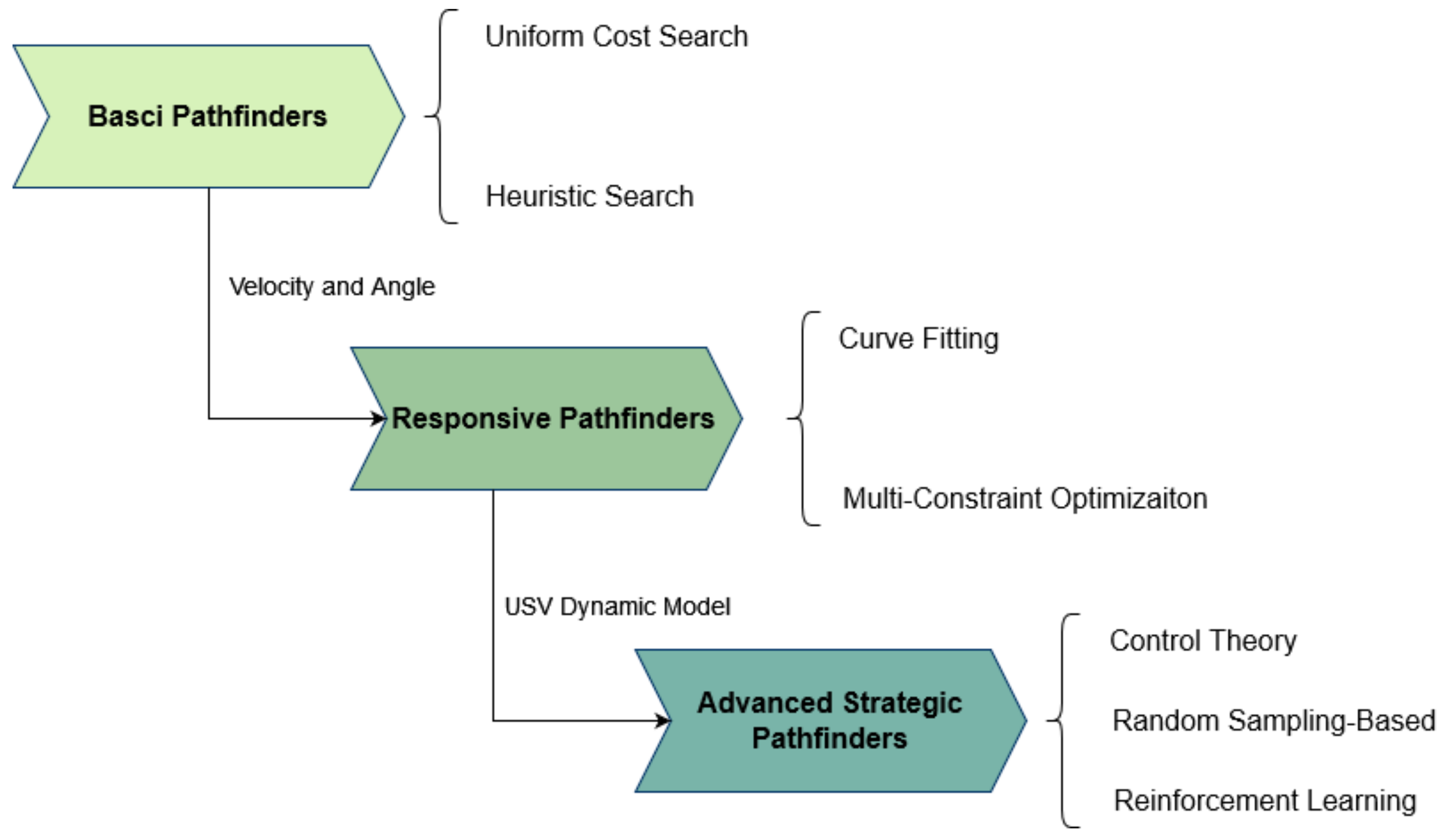
2. USV Path Planning Algorithms Progress
2.1. Basic Pathfinders
2.2. Responsive Pathfinders
2.3. Advanced Strategic Pathfinders
2.4. Summary
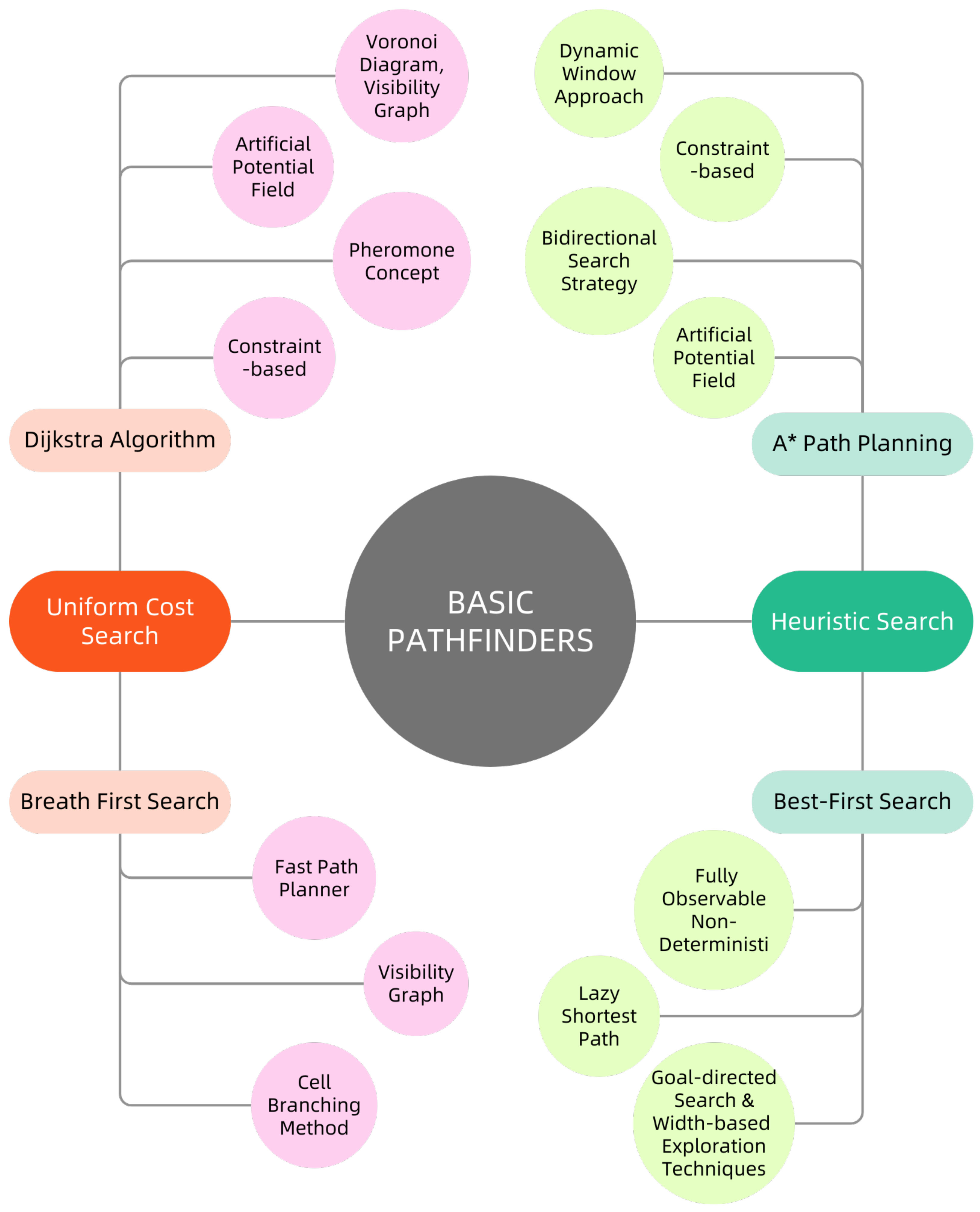
3. Basic Pathfinders
3.1. Uniform Cost Search
3.1.1. Dijkstra Algorithm
- Initialization:
- Iteration:Select the node u with the minimum distance:For each neighbor v of u:
- Update:Mark u as visited.
- Termination:Continue the process until all nodes have been visited.
3.1.2. Breath-First Search (BFS)
3.2. Heuristic Search
3.2.1. Best-First Search
3.2.2. A* Path Planning
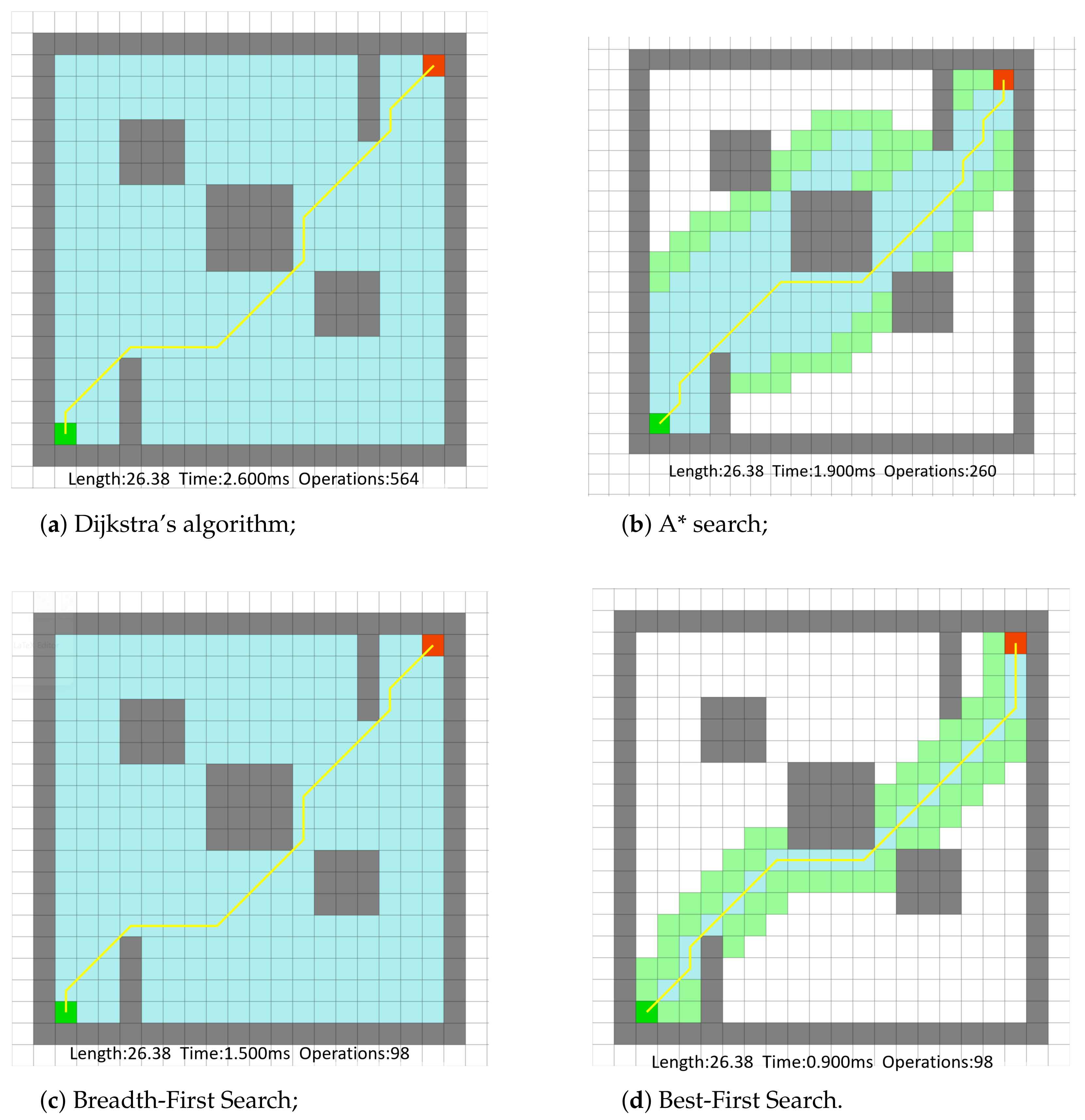
3.3. Summary
- A*: 1.7 ms (average).
- Dijkstra’s: 2.31 ms (average).
- Best-First Search: 1.05 ms (average).
- Breadth-First Search: 1.92 ms (average).
- A*: 260 nodes.
- Dijkstra’s: 564 nodes.
- Best-First Search: 98 nodes.
- Breadth-First Search: 564 nodes.
4. Responsive Pathfinders
4.1. Curve Fitting

4.2. Multi-Constraint Optimization
- Dynamic constraints:where and are the velocity and acceleration, and is the turning radius at time t.
- Environmental constraints:where is the position of the vehicle and is the position of obstacles at time t, with being the minimum safe distance.
- Energy constraint:where is the power consumption, T is the total time, and is the maximum allowable energy consumption.
4.3. Summary
5. Advanced Strategic Pathfinders
5.1. Control Theory for USV Advanced Strategic Pathfinders
5.2. Random Sampling-Based Approach
5.3. Reinforcement Learning Approach
5.4. Summary
- Reachability (R) = 1 or 0: indicates whether a destination is reachable (R = 1) or not (R = 0), influencing subsequent planning stages.
- Import USV model and environment factors: starts by integrating a detailed model of the USV along with critical environmental factors such as wave height, wind speed, and water currents that significantly affect navigational decisions.
- Planning space: considers the spatial constraints imposed by the environment and the USV’s own dynamic capabilities.
- Planning time: time is discretized, with each interval representing a decision point in the navigation process.
- Planning behavior: focuses on operational decisions such as power and rudder adjustments needed to navigate effectively.
- Planning criterion: aims to devise a navigational path that not only maintains environmental and spatial connectivity, but also adheres to the USV’s operational constraints and objectives.
6. Advancements and Challenges in USV Path Planning
6.1. Advancements in Path Planning
6.2. Challenges in USV Path Planning
6.3. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
| USV | Unmanned Surface Vehicle |
| ORS | On-Rotor Sensing |
| MEMS | Micro-Electro-Mechanical Systems |
| MNED | Maximum Negative Entropy Deconvolution |
| BLE | Bluetooth Low Energy |
| PK-APF | Path-Keeping Artificial Potential Field |
| RBFP | Riverbank Following Planner |
| PID | Proportional-Integral-Differential |
| MMG | Maneuvering Mathematical Group |
| FPP | Fast Path Planner |
| PRM | Probabilistic Roadmap Method |
| RRT | Rapidly exploring Random Tree |
| EP-RRT* | Expanding Path RRT* |
| COLREGs | International Regulations for Preventing Collisions at Sea |
| ADAM | Anomaly Detection and Mitigation |
| AD | Anomaly Detection |
| A* | A-star (algorithm) |
| SCDRL | Smoothly Convergent Deep Reinforcement Learning |
| DFQL | Dynamic and Fast Q-learning |
| DRL | Deep Reinforcement Learning |
| NSFQ | Neural Network Smoothing and Fast Q-Learning |
| FAA* | Finite Angle A* |
| FOND | Fully Observable Non-Deterministic |
References
- Sun, J.; Tang, J.; Lao, S. Collision avoidance for cooperative UAVs with optimized artificial potential field algorithm. IEEE Access 2017, 5, 18382–18390. [Google Scholar] [CrossRef]
- Wu, Y.; Low, K.H.; Lv, C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE Trans. Veh. Technol. 2020, 69, 6782–6787. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Senthilnath, J.; Kandukuri, M.; Dokania, A.; Ramesh, K. Application of UAV imaging platform for vegetation analysis based on spectral-spatial methods. Comput. Electron. Agric. 2017, 140, 8–24. [Google Scholar] [CrossRef]
- Martinez-Alpiste, I.; Golcarenarenji, G.; Wang, Q.; Alcaraz-Calero, J.M. Search and rescue operation using UAVs: A case study. Expert Syst. Appl. 2021, 178, 114937. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the 2016 International Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5. [Google Scholar]
- Zhou, C.; Gu, S.; Wen, Y.; Du, Z.; Xiao, C.; Huang, L.; Zhu, M. The review unmanned surface vehicle path planning: Based on multi-modality constraint. Ocean. Eng. 2020, 200, 107043. [Google Scholar] [CrossRef]
- Xiang, L.; Xiaoming, Y.; Quanbin, W.; Weiguang, L.; Hanlin, G. Review on the research of local path planning algorithms for unmanned surface vehicles. Chin. J. Ship Res. 2021, 16, 1–10. [Google Scholar]
- Khaled, D.; Aly, H.; Khaled, M.; Mahmoud, N.; Shabaan, S.; Abdellatif, A. Development of a Sustainable Unmanned Surface Vehicle (USV) for Search and Rescue Operations. In International Undergraduate Research Conference; The Military Technical College: Cairo, Egypt, 2021; Volume 5, pp. 462–468. [Google Scholar]
- Rowley, J. Autonomous unmanned surface vehicles (usv): A paradigm shift for harbor security and underwater bathymetric imaging. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–6. [Google Scholar]
- Bingham, B.; Kraus, N.; Howe, B.; Freitag, L.; Ball, K.; Koski, P.; Gallimore, E. Passive and active acoustics using an autonomous wave glider. J. Field Robot. 2012, 29, 911–923. [Google Scholar] [CrossRef]
- Wu, G.; Xu, T.; Sun, Y.; Zhang, J. Review of multiple unmanned surface vessels collaborative search and hunting based on swarm intelligence. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221091885. [Google Scholar] [CrossRef]
- Öztürk, Ü.; Akdağ, M.; Ayabakan, T. A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective. Ocean. Eng. 2022, 251, 111010. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents. Ocean. Eng. 2018, 169, 187–201. [Google Scholar] [CrossRef]
- Madeo, D.; Pozzebon, A.; Mocenni, C.; Bertoni, D. A low-cost unmanned surface vehicle for pervasive water quality monitoring. IEEE Trans. Instrum. Meas. 2020, 69, 1433–1444. [Google Scholar] [CrossRef]
- Zhou, X.; Ge, Y.; Li, W.; Ye, G. Time-constrained multiple unmanned surface vehicles cooperation for sea surface oil pollution cleanup. In Proceedings of the 2021 6th International Conference on Robotics and Automation Engineering (ICRAE), Guangzhou, China, 19–22 November 2021; pp. 40–45. [Google Scholar]
- Gatesichapakorn, S.; Takamatsu, J.; Ruchanurucks, M. ROS based autonomous mobile robot navigation using 2D LiDAR and RGB-D camera. In Proceedings of the 2019 First International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 16–18 January 2019; pp. 151–154. [Google Scholar]
- Deng, Y.; Shan, Y.; Gong, Z.; Chen, L. Large-scale navigation method for autonomous mobile robot based on fusion of GPS and lidar SLAM. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 3145–3148. [Google Scholar]
- Zhang, B.; Zhang, J. Robot Mapping and Navigation System Based on Multi-sensor Fusion. In Proceedings of the 2021 4th International Conference on Artificial Intelligence and Big Data (ICAIBD), Chengdu, China, 28–31 May 2021; pp. 632–636. [Google Scholar]
- Fahlstrom, P.G.; Gleason, T.J.; Sadraey, M.H. Introduction to UAV Systems; John Wiley & Sons: Hoboken, NJ, USA, 2022. [Google Scholar]
- Gage, D.W. UGV History 101: A Brief History of Unmanned Ground Vehicle (UGV) Development Efforts; Naval Ocean Systems Center: San Diego, CA, USA, 1995. [Google Scholar]
- Barrera, C.; Padron, I.; Luis, F.; Llinas, O. Trends and challenges in unmanned surface vehicles (Usv): From survey to shipping. Transnav Int. J. Mar. Navig. Saf. Sea Transp. 2021, 15, 135–142. [Google Scholar] [CrossRef]
- Hong, J.; Park, K. A new mobile robot navigation using a turning point searching algorithm with the consideration of obstacle avoidance. Int. J. Adv. Manuf. Technol. 2011, 52, 763–775. [Google Scholar] [CrossRef]
- Kuffner, J.J. Efficient optimal search of uniform-cost grids and lattices. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 2, pp. 1946–1951. [Google Scholar]
- Wang, H.; Yu, Y.; Yuan, Q. Application of Dijkstra Algorithm in Robot Path-Planning. In Proceedings of the 2011 Second International Conference on Mechanic Automation and Control Engineering, Inner Mongolia, China, 15–17 July 2011; pp. 1067–1069. [Google Scholar]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D.; Khan, A. Feasibility Study of a Constrained Dijkstra Approach for Optimal Path Planning of an Unmanned Surface Vehicle in a Dynamic Maritime Environment. In Proceedings of the 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 25–27 April 2018; pp. 117–122. [Google Scholar] [CrossRef]
- Zhu, Z.; Li, L.; Wu, W.; Jiao, Y. Application of improved Dijkstra algorithm in intelligent ship path planning. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 4926–4931. [Google Scholar]
- Niu, H.; Lu, Y.; Savvaris, A.; Tsourdos, A. Efficient Path Planning Algorithms for Unmanned Surface Vehicle. IFAC-PapersOnLine 2016, 49, 121–126. [Google Scholar] [CrossRef]
- Xie, S.; Wu, P.; Liu, H.; Yan, P.; Li, X.; Luo, J.; Li, Q. A novel method of unmanned surface vehicle autonomous cruise. Ind. Robot. Int. J. 2016, 43, 121–130. [Google Scholar] [CrossRef]
- Li, Q.; Xie, F.; Zhao, J.; Xu, B.; Yang, J.; Liu, X.; Suo, H. FPS: Fast path planner algorithm based on sparse visibility graph and bidirectional breadth-first search. Remote Sens. 2022, 14, 3720. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, W.; He, D.; Wang, Z. A fewest-turn-and-shortest path algorithm based on breadth-first search. Geo-Spat. Inf. Sci. 2014, 17, 201–207. [Google Scholar] [CrossRef]
- Subramanian, M.B.; Sudhagar, K.; RajaRajeswari, G. Optimal path forecasting of an autonomous mobile robot agent using breadth first search algorithm. Int. J. Mech. Mechatron. Eng. 2014, 14, 85–89. [Google Scholar]
- Sivakumar, P.á.; Varghese, K.; Babu, N.R. Automated path planning of cooperative crane lifts using heuristic search. J. Comput. Civ. Eng. 2003, 17, 197–207. [Google Scholar] [CrossRef]
- Dellin, C.; Srinivasa, S. A unifying formalism for shortest path problems with expensive edge evaluations via lazy best-first search over paths with edge selectors. In Proceedings of the International Conference on Automated Planning and Scheduling, London, UK, 12–17 June 2016; Volume 26, pp. 459–467. [Google Scholar]
- Messa, F.; Pereira, A.G. A best-first search algorithm for FOND planning and heuristic functions to optimize decompressed solution size. In Proceedings of the International Conference on Automated Planning and Scheduling, Prague, Czech Republic, 8–13 July 2023; Volume 33, pp. 277–285. [Google Scholar]
- Lipovetzky, N.; Geffner, H. Best-first width search: Exploration and exploitation in classical planning. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; Volume 31. [Google Scholar]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean. Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Cover, T.; Hart, P. Nearest neighbor pattern classification. IEEE Trans. Inf. Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.; Bucknall, R. Smoothed A* algorithm for practical unmanned surface vehicle path planning. Appl. Ocean. Res. 2019, 83, 9–20. [Google Scholar] [CrossRef]
- Wang, N.; Gao, Y.; Zheng, Z.; Zhao, H.; Yin, J. A hybrid path-planning scheme for an unmanned surface vehicle. In Proceedings of the 2018 Eighth International Conference on Information Science and Technology (ICIST), Cordoba, Granada, 30 June–6 July 2018; pp. 231–236. [Google Scholar]
- Zhang, H.; Tao, Y.; Zhu, W. Global Path Planning of Unmanned Surface Vehicle Based on Improved A-Star Algorithm. Sensors 2023, 23, 6647. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Huda, M.N.; Sun, L.; Yu, H. A survey on underactuated robotic systems: Bio-inspiration, trajectory planning and control. Mechatronics 2020, 72, 102443. [Google Scholar] [CrossRef]
- Dougherty, F.; Woolweaver, G. At-sea testing of an unmanned underwater vehicle flight control system. In Proceedings of the Symposium on Autonomous Underwater Vehicle Technology, Washington, DC, USA, 5–6 June 1990; pp. 65–73. [Google Scholar]
- Anderson, R.P.; Milutinović, D. A stochastic approach to dubins vehicle tracking problems. IEEE Trans. Autom. Control. 2014, 59, 2801–2806. [Google Scholar] [CrossRef]
- Kaya, D.; Kutay, A.T. Modeling and simulation of a quadrotor using curve fitting method. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Kissimmee, FL, USA, 5–9 January 2015; p. 2706. [Google Scholar]
- Chen, Y. A Preliminary Study on the Optimized Collaborative Strategy and Implementation of the Unmanned Surface Vehicle. Master’s Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2016. [Google Scholar]
- Liu, L.; Xiao, C.; Wen, Y. Motion planning algorithm for unmanned surface vehicle based on Dubins path. J. Comput. Appl. 2017, 37, 2114. [Google Scholar]
- Cohen, I.; Epstein, C.; Shima, T. On the discretized dubins traveling salesman problem. IISE Trans. 2017, 49, 238–254. [Google Scholar] [CrossRef]
- Dahl, A.R. Path Planning and Guidance for Marine Surface Vessels. Master’s Thesis, Institutt for Teknisk Kybernetikk, Trondheim, Norway, 2013. [Google Scholar]
- Hong, L.; Wenjun, W.; Keqiang, L. Parallel parking path planning based on B-spline theory. China J. Highw. Transp. 2016, 29, 143–153. [Google Scholar]
- Wang, Y.; Zhu, X.; Zhou, Z. A method of UAV path planning based on the Clothoid curve. J. Northwest. Polytech. Univ. 2012, 6, 874–878. [Google Scholar]
- Sun, X. Research on the Real-Time Path Planning System of Unmanned Surface vehicle. Master’s Thesis, Dalian Maritime University, Dalian, China, 2016. [Google Scholar]
- Wang, N.; Jin, X.; Er, M.J. A multilayer path planner for a USV under complex marine environments. Ocean. Eng. 2019, 184, 1–10. [Google Scholar] [CrossRef]
- Jiang, J.; Yao, X.; Yang, E.; Mehnen, J.; Yu, H. An Improved Adaptive Genetic Algorithm for Mobile Robot Path Planning Analogous to the Ordered Clustered TSP. In Proceedings of the 2020 IEEE Congress on Evolutionary Computation (CEC), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Lyridis, D.V. An improved ant colony optimization algorithm for unmanned surface vehicle local path planning with multi-modality constraints. Ocean. Eng. 2021, 241, 109890. [Google Scholar] [CrossRef]
- Kim, H.; Kim, D.; Shin, J.U.; Kim, H.; Myung, H. Angular rate-constrained path planning algorithm for unmanned surface vehicles. Ocean. Eng. 2014, 84, 37–44. [Google Scholar] [CrossRef]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Raeburn, C.; Salter, I.; Pekcan, C. A multiobjective optimization approach for COLREGs-compliant path planning of autonomous surface vehicles verified on networked bridge simulators. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1167–1179. [Google Scholar] [CrossRef]
- Yang, J.M.; Tseng, C.M.; Tseng, P. Path planning on satellite images for unmanned surface vehicles. Int. J. Nav. Archit. Ocean. Eng. 2015, 7, 87–99. [Google Scholar] [CrossRef]
- Xiang, Z.; Jin, C.; Du, K.; Mao, Y.; Song, L. Local obstacle avoidance for unmanned surface vehicle using a hierarchical strategy based on particle swarm optimization. J. Wuhan Univ. Technol. 2015, 37, 38–45. [Google Scholar]
- Du, Z.; Wen, Y.; Xiao, C.; Zhang, F.; Huang, L.; Zhou, C. Motion planning for unmanned surface vehicle based on trajectory unit. Ocean. Eng. 2018, 151, 46–56. [Google Scholar] [CrossRef]
- Gu, S.; Zhou, C.; Wen, Y.; Xiao, C.; Knoll, A. Motion planning for an unmanned surface vehicle with wind and current effects. J. Mar. Sci. Eng. 2022, 10, 420. [Google Scholar] [CrossRef]
- Woo, J.; Park, J.; Yu, C.; Kim, N. Dynamic model identification of unmanned surface vehicles using deep learning network. Appl. Ocean. Res. 2018, 78, 123–133. [Google Scholar] [CrossRef]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Yu, H. Nonholonomic Wheeled Mobile Robot Motion Planning and Control Research. Master’s Thesis, Ocean University of China, Qingdao, China, 2014. [Google Scholar]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. 2015, 20, 37–52. [Google Scholar] [CrossRef]
- Du, Z.; Wen, Y.; Xiao, C.; Huang, L.; Zhou, C.; Zhang, F. Trajectory-cell based method for the unmanned surface vehicle motion planning. Appl. Ocean. Res. 2019, 86, 207–221. [Google Scholar] [CrossRef]
- Bitar, G.; Vestad, V.N.; Lekkas, A.M.; Breivik, M. Warm-started optimized trajectory planning for ASVs. IFAC-PapersOnLine 2019, 52, 308–314. [Google Scholar] [CrossRef]
- Feng, Z.; Pan, Z.; Chen, W.; Liu, Y.; Leng, J. Usv application scenario expansion based on motion control, path following and velocity planning. Machines 2022, 10, 310. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Cabecinhas, D.; Pascoal, A.; Zhang, W. Prescribed performance path following control of USVs via an output-based threshold rule. IEEE Trans. Veh. Technol. 2023, 73, 6171–6182. [Google Scholar] [CrossRef]
- Ma, L.; Xue, J.; Kawabata, K.; Zhu, J.; Ma, C.; Zheng, N. Efficient sampling-based motion planning for on-road autonomous driving. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1961–1976. [Google Scholar] [CrossRef]
- Zaccone, R.; Martelli, M. A random sampling based algorithm for ship path planning with obstacles. In Proceedings of the International Ship Control Systems Symposium (iSCSS), Delft, The Netherlands, 6–8 October 2020; Volume 2, p. 4. [Google Scholar]
- Noh, G.; Park, J.; Han, D.; Lee, D. Selective goal aiming rapidly exploring random tree path planning for UAVs. Int. J. Aeronaut. Space Sci. 2021, 22, 1397–1412. [Google Scholar] [CrossRef]
- Bohlin, R.; Kavraki, L.E. Path planning using lazy PRM. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 521–528. [Google Scholar]
- Chowdhury, M.I.; Schwartz, D.G. Uuv on-board path replanning using prm-a. In Proceedings of the Global Oceans 2020: Singapore–US Gulf Coast, Online, 5–30 October 2020; pp. 1–8. [Google Scholar]
- Chowdhury, M.I.; Schwartz, D.G. USV Obstacle Avoidance Using a Novel Local Path Planner and Novel Global Path Planner With r-PRM. In Proceedings of the ISR Europe 2022; 54th International Symposium on Robotics, VDE, Munich, Germany, 20–21 June 2022; pp. 1–8. [Google Scholar]
- Wen, N.; Zhang, R.; Wu, J.; Liu, G. Online planning for relative optimal and safe paths for USVs using a dual sampling domain reduction-based RRT* method. Int. J. Mach. Learn. Cybern. 2020, 11, 2665–2687. [Google Scholar] [CrossRef]
- Ouyang, Z.; WANG, H.; HUANG, Y.; Yang, K.; Yi, H. Path planning technologies for USV formation based on improved RRT. Chin. J. Ship Res. 2020, 15, 18–24. [Google Scholar]
- Ding, J.; Zhou, Y.; Huang, X.; Song, K.; Lu, S.; Wang, L. An improved RRT* algorithm for robot path planning based on path expansion heuristic sampling. J. Comput. Sci. 2023, 67, 101937. [Google Scholar] [CrossRef]
- Kaelbling, L.P.; Littman, M.L.; Moore, A.W. Reinforcement learning: A survey. J. Artif. Intell. Res. 1996, 4, 237–285. [Google Scholar] [CrossRef]
- Zhao, Y.; Ma, Y.; Hu, S. USV formation and path-following control via deep reinforcement learning with random braking. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5468–5478. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Qi, X.; Ma, Y.; Li, Z.; Malekian, R.; Sotelo, M.A. Path following optimization for an underactuated USV using smoothly-convergent deep reinforcement learning. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6208–6220. [Google Scholar] [CrossRef]
- Orr, J.; Dutta, A. Multi-agent deep reinforcement learning for multi-robot applications: A survey. Sensors 2023, 23, 3625. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Wu, P.; Zhang, H.; Guo, W.; Liu, Y. Learn to navigate: Cooperative path planning for unmanned surface vehicles using deep reinforcement learning. IEEE Access 2019, 7, 165262–165278. [Google Scholar] [CrossRef]
- Hao, B.; Du, H.; Yan, Z. A path planning approach for unmanned surface vehicles based on dynamic and fast Q-learning. Ocean. Eng. 2023, 270, 113632. [Google Scholar] [CrossRef]
- Zhou, Z.; Zheng, Y.; Liu, K.; He, X.; Qu, C. A Real-time algorithm for USV navigation based on deep reinforcement learning. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–4. [Google Scholar]
- Wang, Y.; Lu, C.; Wu, P.; Zhang, X. Path planning for unmanned surface vehicle based on improved Q-Learning algorithm. Ocean. Eng. 2024, 292, 116510. [Google Scholar] [CrossRef]



| Feature | Basic Pathfinders | Responsive Pathfinders | Advanced Strategic Pathfinders |
|---|---|---|---|
| Basic Static Map Path Planning | ✓ | ✓ | ✓ |
| Dynamic Obstacle Avoidance | ✓ | ✓ | |
| Temporal Dynamics Path Planning | ✓ | ✓ | |
| Consideration of Motion Constraints | ✓ | ||
| Real-Time Environmental Sensing and Response | ✓ | ||
| Path Optimization in Complex Environments | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, Y.; Gao, Q.; Yue, Y.; Lim, E.G.; Paoletti, P.; Ma, J.; Zhu, X. Evolution of Unmanned Surface Vehicle Path Planning: A Comprehensive Review of Basic, Responsive, and Advanced Strategic Pathfinders. Drones 2024, 8, 540. https://doi.org/10.3390/drones8100540
Chu Y, Gao Q, Yue Y, Lim EG, Paoletti P, Ma J, Zhu X. Evolution of Unmanned Surface Vehicle Path Planning: A Comprehensive Review of Basic, Responsive, and Advanced Strategic Pathfinders. Drones. 2024; 8(10):540. https://doi.org/10.3390/drones8100540
Chicago/Turabian StyleChu, Yijie, Qizhong Gao, Yong Yue, Eng Gee Lim, Paolo Paoletti, Jieming Ma, and Xiaohui Zhu. 2024. "Evolution of Unmanned Surface Vehicle Path Planning: A Comprehensive Review of Basic, Responsive, and Advanced Strategic Pathfinders" Drones 8, no. 10: 540. https://doi.org/10.3390/drones8100540
APA StyleChu, Y., Gao, Q., Yue, Y., Lim, E. G., Paoletti, P., Ma, J., & Zhu, X. (2024). Evolution of Unmanned Surface Vehicle Path Planning: A Comprehensive Review of Basic, Responsive, and Advanced Strategic Pathfinders. Drones, 8(10), 540. https://doi.org/10.3390/drones8100540