
Auto-Landing of Moving-Mass Actuated Unmanned Aerial Vehicles Based on Linear Active Disturbance Rejection Control


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The characteristics and dynamic models of the moving-mass actuated unmanned aerial vehicle are presented and an automatic landing control strategy is designed, which has not been studied yet for this type of UAV. Both lateral and longitudinal movements of the UAV are taken into account during landing and the tracking error in both planes is kept within a small range. This is in contrast to many papers [33,34] where only separate lateral and longitudinal dynamics are studied in auto-landings.
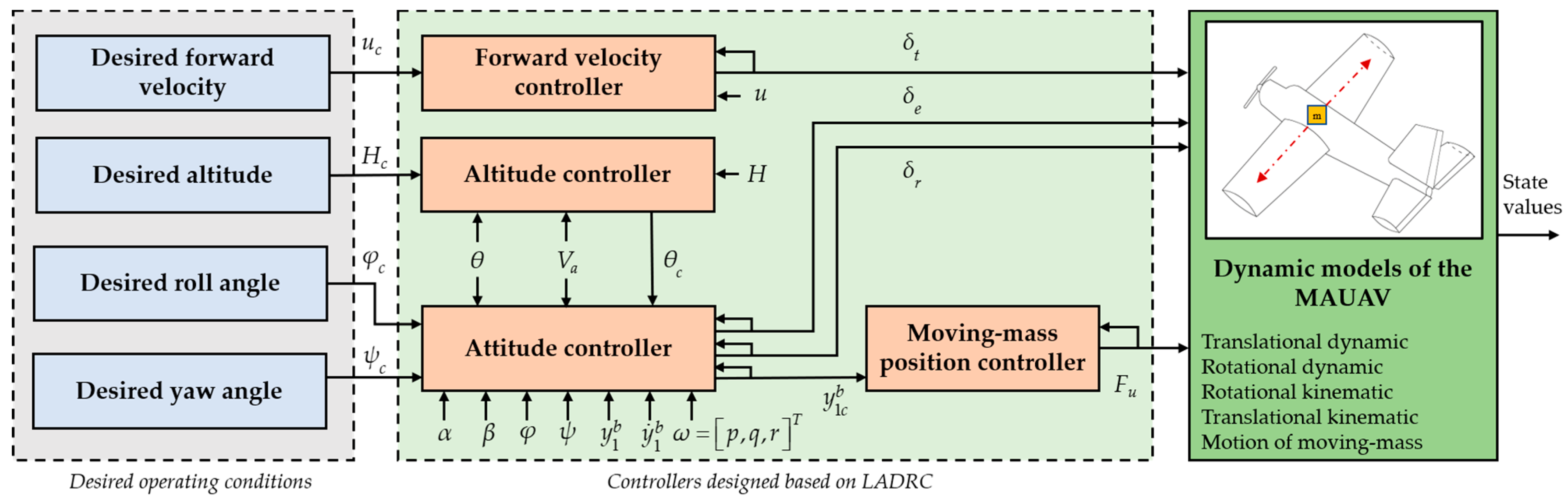
- The control strategy of the MAUAV is divided into an altitude-attitude slider system and a forward velocity tracking system. The former includes three controllers of altitude, attitude, and slider to provide the expected driving force for slider and expected deflections for rudder and elevator; the latter establishes a throttle command to maintain a steady forward velocity, due to the fact that accurate control of forward velocity is essential for an efficient and safe landing. In addition, compared with the attitude control of the same type of UAV [26], this paper considers the influence of wind disturbance during the whole landing process, which is more in line with the actual situation.
- The design of all four controllers in this paper is based on the LADRC, which simplifies the difficulty of the controller design and the complexity of the algorithm. The designed controllers are not based on accurate dynamic models and are able to estimate and compensate for external disturbances, offering better applicability than existing controllers used in the field of mass-actuated UAVs [24,35].
- The LuGre friction model has been introduced into the moving-mass position model to provide a more detailed description of the friction behavior of the slider and to make the simulation environment more realistic.
2. Problem Formulation and Dynamic Models
2.1. Configuration of the MAUAV
2.2. Wind Description
2.3. Dynamic Model of the MAUAV
3. Design of the Controllers
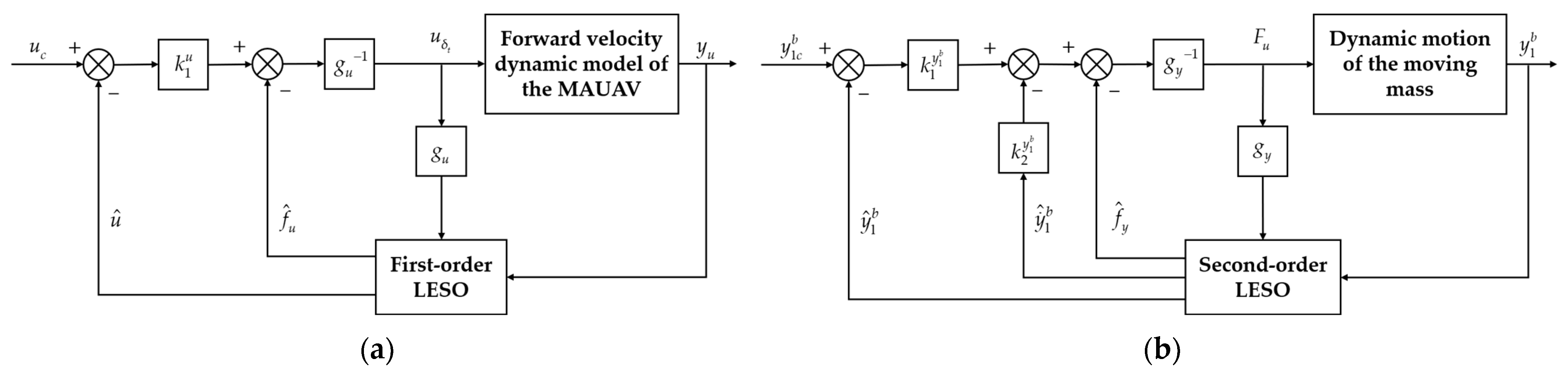
3.1. Forward Velocity Controller
3.2. Altitude Controller
3.3. Attitude Controller
3.4. Moving-Mass Position Controller
3.5. Convergence Analysis of LESO
3.6. Stabitily Analysis of LADRC
4. Numerical Simulation Results
4.1. Numerical Simulation Setup
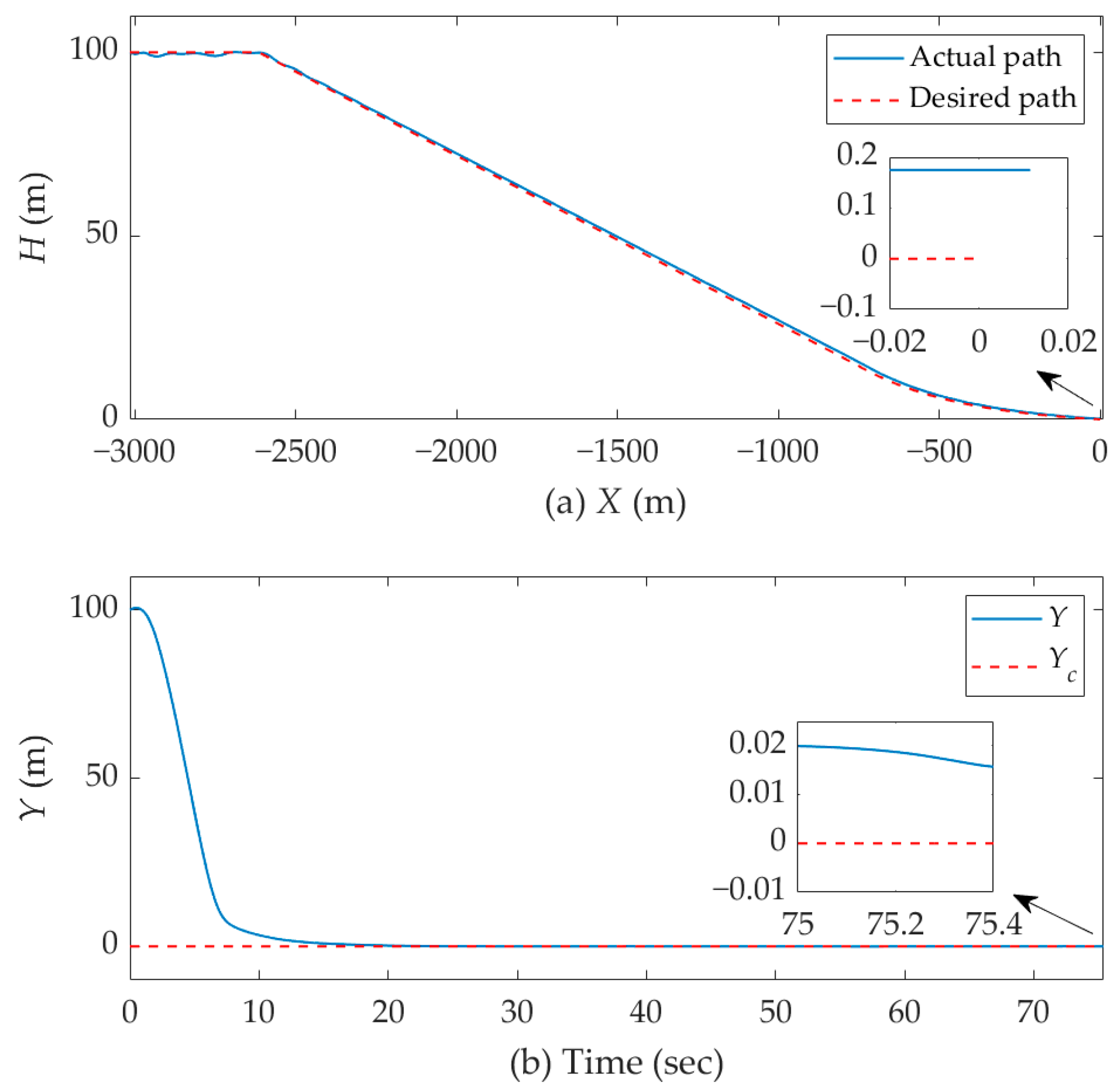
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2012; ISBN 978-1-4008-4060-1. [Google Scholar]
- Muchiri, G.N.; Kimathi, S. A Review of Applications and Potential Applications of UAV. In Proceedings of the Sustainable Research and Innovation Conference, Pretoria, South Africa, 20–24 June 2022; pp. 280–283. [Google Scholar]
- Jakovljevic, G.; Govedarica, M.; Alvarez-Taboada, F. A Deep Learning Model for Automatic Plastic Mapping Using Unmanned Aerial Vehicle (UAV) Data. Remote Sens. 2020, 12, 1515. [Google Scholar] [CrossRef]
- Zhang, A.; Xu, H.; Bi, W.; Xu, S. Adaptive Mutant Particle Swarm Optimization Based Precise Cargo Airdrop of Unmanned Aerial Vehicles. Appl. Soft Comput. 2022, 130, 109657. [Google Scholar] [CrossRef]
- Wu, Y.; Shan, Y.; Lai, Y.; Zhou, S. Method of Calculating Land Surface Temperatures Based on the Low-Altitude UAV Thermal Infrared Remote Sensing Data and the Near-Ground Meteorological Data. Sustain. Cities Soc. 2022, 78, 103615. [Google Scholar] [CrossRef]
- Hu, Y.; Lu, Z.; Ling, K.V.; Liao, W.; Zhang, X. Multiplexed MPC Attitude Control of a Moving Mass Satellite Using Dual-Rate Piecewise Affine Model. Aerosp. Sci. Technol. 2022, 128, 107778. [Google Scholar] [CrossRef]
- He, L.; Sheng, T.; Kumar, K.D.; Zhao, Y.; Ran, D.; Chen, X. Attitude Maneuver of a Satellite Using Movable Masses. Acta Astronaut. 2020, 176, 464–475. [Google Scholar] [CrossRef]
- Li, G.; Chao, T.; Wang, S.; Yang, M. Segmented Guidance Law for Single Moving Mass Controlled Reentry Vehicle with Multiple Constraints. Aerosp. Sci. Technol. 2022, 121, 107364. [Google Scholar] [CrossRef]
- Dong, K.; Zhou, J.; Zhou, M.; Zhao, B. Roll Control for Single Moving-Mass Actuated Fixed-Trim Reentry Vehicle Considering Full State Constraints. Aerosp. Sci. Technol. 2019, 94, 105365. [Google Scholar] [CrossRef]
- Zheng, J.; Sergeevna, S.M. Continuous Integral Robust Roll Control for Single Moving-Mass Controlled Reentry Vehicle. J. Phys. Conf. Ser. 2022, 2235, 012024. [Google Scholar] [CrossRef]
- Li, B.; Su, T.-C. Heading Autopilot of Autonomous Underwater Vehicles With Internal Moving Mass. J. Comput. Nonlinear Dyn. 2016, 12, 021003. [Google Scholar] [CrossRef]
- Susanto, T.; Bayu Setiawan, M.; Jayadi, A.; Rossi, F.; Hamdhi, A.; Persada Sembiring, J. Application of Unmanned Aircraft PID Control System for Roll, Pitch and Yaw Stability on Fixed Wings. In Proceedings of the 2021 International Conference on Computer Science, Information Technology, and Electrical Engineering (ICOMITEE), Banyuwangi, Indonesia, 27–28 October 2021; pp. 186–190. [Google Scholar]
- Venkateswara Rao, D.M.K.K.; Go, T.H. Automatic Landing System Design Using Sliding Mode Control. Aerosp. Sci. Technol. 2014, 32, 180–187. [Google Scholar] [CrossRef]
- Mathisen, S.; Gryte, K.; Gros, S.; Johansen, T.A. Precision Deep-Stall Landing of Fixed-Wing UAVs Using Nonlinear Model Predictive Control. J. Intell. Robot. Syst. 2020, 101, 24. [Google Scholar] [CrossRef]
- Lungu, M. Backstepping and Dynamic Inversion Control Techniques for Automatic Landing of Fixed Wing Unmanned Aerial Vehicles. Aerosp. Sci. Technol. 2022, 120, 107261. [Google Scholar] [CrossRef]
- Zhi, Y.; Liu, L.; Guan, B.; Wang, B.; Cheng, Z.; Fan, H. Distributed Robust Adaptive Formation Control of Fixed-Wing UAVs with Unknown Uncertainties and Disturbances. Aerosp. Sci. Technol. 2022, 126, 107600. [Google Scholar] [CrossRef]
- Bhandari, S.; Patel, N. Nonlinear Adaptive Control of a Fixed-Wing UAV Using Multilayer Perceptrons. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Monterey, CA, USA, 5–8 August 2002; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 2002. [Google Scholar]
- Ferreira, H.C.; Baptista, R.S.; Ishihara, J.Y.; Borges, G.A. Disturbance Rejection in a Fixed Wing UAV using nonlinear H∞ state feedback. In Proceedings of the 2011 9th IEEE International Conference on Control and Automation (ICCA), Santiago, Chile, 19–21 December 2011; pp. 386–391. [Google Scholar]
- Lungu, M. Auto-Landing of Fixed Wing Unmanned Aerial Vehicles Using the Backstepping Control. ISA Trans. 2019, 95, 194–210. [Google Scholar] [CrossRef]
- Bicer, Y.; Moghadam, M.; Sahin, C.; Eroglu, B.; Üre, N.K. Vision-Based UAV Guidance for Autonomous Landing with Deep Neural Networks. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 2019. [Google Scholar]
- Yuan, B.; Ma, W.; Wang, F. High Speed Safe Autonomous Landing Marker Tracking of Fixed Wing Drone Based on Deep Learning. IEEE Access 2022, 10, 80415–80436. [Google Scholar] [CrossRef]
- Vengate, S.R.; Erturk, S.A.; Dogan, A. Development and Flight Test of Moving-Mass Actuated Unmanned Aerial Vehicle. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, San Diego, CA, USA, 4–8 January 2016; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 2016. [Google Scholar]
- Erturk, S.A.; Dogan, A. Trim Analyses of Mass-Actuated Airplane in Cruise and Steady-State Turn. J. Aircr. 2017, 54, 1587–1594. [Google Scholar] [CrossRef]
- Erturk, S.A.; Dogan, A. Dynamic Simulation and Control of Mass-Actuated Airplane. J. Guid. Control Dyn. 2017, 40, 1939–1953. [Google Scholar] [CrossRef]
- Erturk, S.A.; Dogan, A. Relative Controllability Evaluation of Mass-Actuated Airplane. J. Guid. Control Dyn. 2019, 42, 384–393. [Google Scholar] [CrossRef]
- Qiu, X.; Zhang, M.; Jing, W.; Gao, C. Dynamics and Adaptive Sliding Mode Control of a Mass-Actuated Fixed-Wing UAV. Int. J. Aeronaut. Space Sci. 2021, 22, 886–897. [Google Scholar] [CrossRef]
- Qiu, X.; Gao, C.; Wang, K.; Jing, W. Attitude Control of a Moving Mass–Actuated UAV Based on Deep Reinforcement Learning. J. Aerosp. Eng. 2022, 35, 04021133. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and Bandwidth-Parameterization Based Controller Tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4989–4996. [Google Scholar]
- Du, B.; Wu, S.; Han, S.; Cui, S. Application of Linear Active Disturbance Rejection Controller for Sensorless Control of Internal Permanent-Magnet Syn-chronous Motor. IEEE Trans. Ind. Electron. 2016, 63, 3019–3027. [Google Scholar] [CrossRef]
- Ding, L.; Ma, R.; Wu, H.; Feng, C.; Li, Q. Yaw Control of an Unmanned Aerial Vehicle Helicopter Using Linear Active Disturbance Rejection Control. Proc. Inst. Mech. Eng. Part J. Syst. Control Eng. 2017, 231, 427–435. [Google Scholar] [CrossRef]
- Sun, C.; Liu, M.; Liu, C.; Feng, X.; Wu, H. An Industrial Quadrotor UAV Control Method Based on Fuzzy Adaptive Linear Active Disturbance Rejection Control. Electronics 2021, 10, 376. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, T. Based on Robust Sliding Mode and Linear Active Disturbance Rejection Control for Attitude of Quadrotor Load UAV. Nonlinear Dyn. 2022, 108, 3485–3503. [Google Scholar] [CrossRef]
- Lungu, M.; Lungu, R. Automatic Control of Aircraft Lateral-Directional Motion during Landing Using Neural Networks and Radio-Technical Subsystems. Neurocomputing 2016, 171, 471–481. [Google Scholar] [CrossRef]
- Chandar, E.A.S. A Review on Longitudinal Control Law Design for a Small Fixed-Wing UAV. Int. Res. J. Eng. Technol. 2022, 9, 197–202. [Google Scholar]
- Wang, X.; Zhou, W.; Mu, R.; Wu, Z. A New Deformation Control Approach for Flexible Wings Using Moving Masses. Aerosp. Sci. Technol. 2020, 106, 106118. [Google Scholar] [CrossRef]
- Stengel, R.F. Flight Dynamics. In Flight Dynamics; Princeton University Press: Princeton, NJ, USA, 2015; ISBN 978-1-4008-6681-6. [Google Scholar]
- Johanastrom, K.; Canudas-de-Wit, C. Revisiting the LuGre Friction Model. IEEE Control Syst. Mag. 2008, 28, 101–114. [Google Scholar] [CrossRef]
- Ambati, P.R.; Padhi, R. A Neuro-Adaptive Augmented Dynamic Inversion Design for Robust Auto-Landing. IFAC Proc. Vol. 2014, 47, 12202–12207. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Y.; Sun, M.; Sun, Q. Convergence and Stability Analysis of Active Disturbance Rejection Control for First-Order Nonlinear Dynamic Systems. Trans. Inst. Meas. Control 2019, 41, 2064–2076. [Google Scholar] [CrossRef]
- Benders, S.; Wenz, A.; Johansen, T.A. Adaptive Path Planning for Unmanned Aircraft Using In-Flight Wind Velocity Estimation. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas Marriott, TE, USA, 12–15 June 2018; pp. 483–492. [Google Scholar]
- Zheng, Q.; Gaol, L.Q.; Gao, Z. On Stability Analysis of Active Disturbance Rejection Control for Nonlinear Time-Varying Plants with Unknown Dynamics. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 3501–3506. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, J.; Neusypin, K.A.; Selezneva, M.S. Auto-Landing of Moving-Mass Actuated Unmanned Aerial Vehicles Based on Linear Active Disturbance Rejection Control. Drones 2023, 7, 539. https://doi.org/10.3390/drones7080539
Zheng J, Neusypin KA, Selezneva MS. Auto-Landing of Moving-Mass Actuated Unmanned Aerial Vehicles Based on Linear Active Disturbance Rejection Control. Drones. 2023; 7(8):539. https://doi.org/10.3390/drones7080539
Chicago/Turabian StyleZheng, Jingzhong, Konstantin Avenirovich Neusypin, and Maria Sergeevna Selezneva. 2023. "Auto-Landing of Moving-Mass Actuated Unmanned Aerial Vehicles Based on Linear Active Disturbance Rejection Control" Drones 7, no. 8: 539. https://doi.org/10.3390/drones7080539
APA StyleZheng, J., Neusypin, K. A., & Selezneva, M. S. (2023). Auto-Landing of Moving-Mass Actuated Unmanned Aerial Vehicles Based on Linear Active Disturbance Rejection Control. Drones, 7(8), 539. https://doi.org/10.3390/drones7080539