1. Introduction
Due to low cost and flexible deployment characteristics, unmanned aerial vehicles (UAVs) have been increasingly, and more widely, used in numerous fields, such as forest fire monitoring [
1,
2], search and rescue [
3], and power grid inspection [
4]. Among these uses, fixed-wing UAVs have been widely used in wide-area coverage search [
5], long-distance logistics transportation [
6], and communication relays [
7], due to their strong carrying capacity, fast flight speed, and long endurance.
With the development of UAV autonomous technology, cooperative control of multiple UAVs (multi-UAVs) has become an important research direction [
8,
9,
10,
11,
12]. Through cooperative operations, multi-UAVs demonstrate high task execution efficiency, superior coordination, intelligence, and autonomy. To ensure the cooperative control performance of multi-UAV systems during mission execution, operational safety has become a hot research issue in the field of flight control. When multi-UAVs cooperate in performing tasks, such as environmental monitoring, fire monitoring, and collaborative search, there is a risk of losing control of the faulty UAVs if one or more UAVs encounter physical faults. In severe cases, the faulty UAVs may collide with surrounding UAVs, resulting in the entire flight formation losing control. Therefore, studying the problem of fault detection (FD), fault estimation, and fault-tolerant cooperative control (FTCC) is of great theoretical significance and practical necessity for the safe flight of monitoring missions and the safe control of multi-UAV systems.
It is worth noting that, with increases in operating time, environmental complexity, and severity, actuators and sensors may experience wear and aging. Furthermore, in the cooperative formation flight of multi-UAVs, the number of system components in the entire system significantly increases. The multi-UAVs system involves communication network connections, which provide the faulty UAVs with the opportunity to send perturbed state information to all nearby UAVs, greatly increasing the probability of collision and failure of the mission undertaken. Compared with the FD and fault-tolerant control (FTC) for single UAVs, the FD and FTCC for multi-UAVs are increasingly complicated. In addition, the external disturbances encountered by UAVs and the system nonlinearity also pose great challenges and difficulties in researching multi-UAVs. How to detect various faults in a multi-UAV system affected by disturbances, and to deal with the faults effectively, have become significant research topics to ensure the safe and cooperative formation flight of multi-UAVs.
In order to discover faults in the system in a timely and accurate manner, many scholars have carried out extensive research on this topic [
13,
14,
15,
16]. In [
17], two sensor fault estimation schemes were proposed for a class of nonlinear systems with uncertainties, which were then applied to satellite control systems. The incipient fault diagnosis of a class of Lipschitz nonlinear systems was studied in [
18]. By constructing total measurable fault information residual (ToMFIR), the incipient faults of multiple sensors can be detected. The linear descriptor reduced-order observer and descriptor sliding-mode observer were proposed to solve the state and fault estimation problems of linear systems with disturbances, sensor and actuator faults in [
19]. Nevertheless, the FD results on multi-UAV systems with actuators and sensor faults and disturbances are very rare.
In practical situations, the consideration of a state constraint is very important for UAVs, since this consideration can simultaneously prevent the occurrence of accidents, ensure the safety of UAVs, improve system stability, enhance performance and efficiency, and reduce energy consumption during flight. In recent years, some methods have been proposed in regard to constraint control problems, including the invariant-set method [
20,
21], model predictive control (MPC) [
22,
23], and barrier Lyapunov function (BLF) [
24,
25], etc. A distributed FTC method and state transformations with the scaling function were proposed for fixed-wing UAVs subject to actuator faults and full state constraints, maintaining speed and attitude within the corresponding constraint ranges [
26]. In [
27], an adaptive FTC scheme, based on reinforcement learning and barrier Lyapunov control technology, was designed to solve the attitude tracking problem of flying-wing UAVs under actuator fault, actuator saturation, and attitude angle constraints. A novel integral barrier Lyapunov function (IBLF) was proposed for the FTC of fixed-wing UAVs with asymmetric time-varying full state constraints [
28]. Nevertheless, the state constraint problem of multiple fixed-wing UAVs is rarely considered, which needs further investigations.
To better improve the cooperative operation performance of the entire multi-UAV system, numerous researchers have achieved a quantity of exploratory FTCC results. At present, FTCC schemes are mainly developed based on the leader–follower formation [
29,
30,
31] and distributed communication architectures [
32,
33,
34]. In [
35], a dynamic surface fixed-time FTC scheme, based on a neoteric disturbance observer, was proposed for fixed-wing UAVs against actuator faults and external disturbances. A fault detection observer was proposed by using the H
∞ method for sensor faults in a multi-UAV system. Then, a distributed fault-tolerant formation controller was designed in [
36]. In [
37], by using intelligent learning architecture and fractional-order calculus, an FTCC strategy was proposed for multiple fixed-wing UAVs with actuator and sensor faults. In addition, there is a high demand to design fixed-time FTCC schemes to ensure rapid fault tolerance.
Based on the above discussions, in this paper, the FD and FTCC strategy are proposed to solve the cooperative control problem of multiple fixed-wing UAVs with actuator faults, sensor faults, and wind disturbances. The contributions of this paper are mainly as follows.
- 1.
Compared with the previous results on FD and fault estimation methods in [
17,
18,
19], a newly constructed cooperative unknown input observer (UIO) is developed to estimate states, faults, and disturbances. Combined with the observers’ estimations, adaptive thresholds are designed to detect actuator and sensor faults in the system.
- 2.
Tangential barrier Lyapunov function (TBLF) is combined with the state transformation with scaling function to constrain the states.
- 3.
Differing from existing FTC strategies for fixed-wing UAVs [
35,
36,
37], a backstepping-based fixed-time FTCC scheme is proposed for multi-UAVs suffering from actuator faults, sensor faults, and wind disturbances.
The rest of this paper is organized as follows.
Section 2 introduces the fixed-wing UAV models with wind disturbances, actuator fault, sensor fault, and the preliminaries for controller design. FD and fault estimation schemes are proposed in
Section 3. An FTCC scheme is designed in
Section 4.
Section 5 illustrates the simulation results. Conclusions are presented in
Section 6.
2. Preliminaries and Problem Statement
2.1. UAV Dynamics
In this paper, a group of fixed-wing follower UAVs and a virtual leader are considered. The dynamic model of the follower UAV#
i with wind disturbances is given as follows [
38]:
where
is the position of the UAV
in the inertial frame for
.
,
, and
denote the velocity, heading angle, and flight path angle, respectively.
,
, and
are the components of the wind speed vector along the
x,
y and
z axes of the inertial coordinate system.
The force equations are expressed as:
where
m and
g are the mass and gravitational constant, respectively.
,
, and
represent the thrust, drag, and lift forces, respectively.
denotes the bank angle.
The forces
and
are described as:
where
and
denote the maximal engine thrust force and instantaneous thrust throttle setting, respectively. The value
denotes the the dynamic pressure and
is the air density,
denotes the wing area.
is the aerodynamic coefficient.
Define
,
, one has:
where
,
,
,
,
,
are given as
, ,
, ,
, .
2.2. Faulty UAV Model
Actuator and sensor faults may give rise to the degradation of flight performance and affect the safety of the formation team. The thrust output of the engine may differ from the expected value due to wear or fault of the engine. Pitot may be faulty due to environmental erosion or influence. For the above reasons, we considered the effectiveness loss, deviation of thrust throttle setting, and pitot faults in this paper, given as
and
. Thus, the following fault models are obtained [
37]:
where
and
denote the applied and commanded control input signals, respectively.
denotes the control effectiveness.
denotes the deviation value.
.
where
and
denote the measured and real state signals, respectively.
,
denotes the measurement effectiveness.
denotes the deviation value.
.
By substituting (
5) and (
6) into (
4), the faulty UAV model is presented as:
2.3. Communication Network
Leader and N follower UAVs were considered in the multi-UAV system. The communication network among the follower UAVs is presented by an undirected topology , where is a set of follower UAVs and is an edge set. If , the jth UAV is a neighbor of the ith UAV. is the neighborhood set of the ith UAV. The adjacency matrix is given by if and otherwise. The Laplacian matrix , where with . Furthermore, the leader adjacency matrix is given by if the ith UAV can obtain the information of the leader and otherwise.
2.4. Control Objective
FD and FTCC scheme for multiple fixed-wing UAVs against actuator faults, sensor faults and wind disturbances are proposed in this paper and the objectives are listed as follows: (a) The actuator faults and sensor faults to be detected by the fault detection scheme; (b) The faults and wind disturbances to be estimated by the developed cooperative UIOs; (c) The desired cooperative formation flight can be kept by the designed FTCC scheme.
The following assumptions and lemmas may be used for the FD and FTCC designs.
Assumption 1. The communication network of multi-UAVs system is undirected and connected.
Lemma 1 ([
39]).
Consider the system . If there exists a Lyapunov function and constants , , , , and such that:Then, the system is practically fixed-time stable. The settling time T is presented as with . The convergence neighborhood is given by: 3. Fault Detection and Estimation Scheme Design
By using the feedback linearization, the fixed-wing UAV model (
1)–(
2) in the presence of actuator and sensor faults can be rewritten as:
where
represents the state variable,
denotes the input signal,
is output vector.
denotes the nonlinear term, which satisfies the Lipschitz constraints in Assumption 2.
represents external disturbance.
and
are actuator fault signals and sensor fault signals, respectively.
,
,
,
,
,
, and
are constant matrices.
,
, and the constant matrices are given as:
, , ,
, ,
, , , .
The nominal form of system (
1)–(
2) can be written as:
Assumption 2. The nonlinear term is assumed to be Lipschitz about x locally, i.e., ,where is a positive constant. is the Lipschitz constant. Considering the influence of disturbances
on FD, linear non-singular transformation is carried out for the system (
9) to realize the decoupling of disturbances and faults. Therefore, the introduced state and output transformation matrices
and
satisfy [
18]:
where
,
,
,
.
According to (
9) and (
12), one obtains
Further, it can be obtained from (
13) that:
where
,
,
,
,
.
,
,
.
,
,
.
,
,
.
,
.
,
,
.
,
.
So far, based on (
12) and (
14), system (
9) can be written into the following two subsystem forms after linear non-singular transformation:
According to [
18,
40], appropriate first-order low-pass filters are designed as (
17) and (
18) for subsystems to convert sensor faults into pseudo-actuator faults. Then, the output
and
of subsystems shown in (
15) and (
16) are passed through the following filters, respectively:
where
and
are the states of filters, and filter matrices
and
are Hurwitz matrices to be designed.
Define
. Furthermore, according to (
15) and (
17), the following augmented system can be obtained:
where
,
,
,
,
,
.
Similarly, based on (
16) and (
18), there is:
where
,
,
,
,
,
,
,
.
Similarly, by using the linear non-singular transformation, the nominal form of system (
10) can be transformed into the following two subsystems:
To sum up, two augmenting subsystems (
19) and (
20) are obtained after the non-singular transformation of system (
9), in which the subsystem formulated in (
19) contains disturbances but is free from faults, and the augmenting subsystem (
20) is subject to both disturbances and faults. In this way, the actuator and sensor fault in system (
9) can be transformed into actuator faults in the augmenting subsystem (
20) for research [
18].
3.1. Cooperative Unknown Input Observers
Based on the augmented subsystems (
19) and (
20), cooperative UIOs are designed for multi-UAVs to realize FD and fault estimation in this subsection.
Assumption 3. The disturbance in (19) is bounded and continuously differentiable, so make ; that is, there are positive constants and , such that , . Assumption 4. The fault is bounded, but its upper bound is unknown, so define , and is continuously differentiable; that is, there exists a positive constant , such that .
Assumption 5. For the subsystems (19) and (20), there exists a matrix of appropriate dimensions, which satisfies . Inspired by the work in [
36], for the subsystem (
19), the proposed cooperative UIOs have the following form:
where
is the state of observer,
is the estimation of
,
is the estimation of
,
is the estimation of
,
,
is the estimation error of
of UAV
,
with total of
N follower UAVs.
and
are given as
where
are positive constants,
, and
are parameters to be designed,
denotes a sign function.
Then, the following error system is obtained:
where
is the estimation error of
,
is the estimation of ,
is the estimation error of .
Similarly, according to the subsystem (
20), the cooperative UIOs are designed as:
where
is the state of observer,
is the estimation of
,
,
,
.
and
are given by
where
are positive constants,
,
, and
are designed parameters.
is a small constant. Suppose the upper bound of
is
, which is unknown.
is the estimation of
, and its adaptive law is designed as
where
is a stable matrix to be designed.
Further, the following error system is obtained:
where
is the estimation error of
,
is the estimation error of
.
Theorem 1. The designed cooperative UIOs in the form of (23) and (26) can guarantee that the estimation errors are asymptotically stable, if there exist positive definite matrices and , such that the following linear matrix inequality (LMI) is satisfied. Proof. Define the vectors as
,
,
, select a Lyapunov function as:
where
,
. ⊗ represents the Kronecker product.
By considering (
25), differentiating
yields:
Based on (
33), Assumption 2, and Young’s inequality, it is shown that:
where
,
.
According to (
32), (
34) and using Young’s inequality, the following inequality can be obtained:
where
.
By considering (
29) and differentiating
, one has:
Similarly, notice that:
where
,
.
According to (
36), (
37), and using Young’s inequality, the following inequality can be obtained.
Define
, then, one obtains
Thus, according to the Lyapunov stability theorem, if , the estimation errors are asymptotically stable and can converge to zero.
This ends the proof. □
3.2. Fault Detection and Estimation
Considering the influence of disturbances on FD and fault estimation in the augmented subsystem (
20), time-varying adaptive thresholds were designed to detect faults in the system. Combined with the estimation of the disturbances from the cooperative UIOs (
23), the adaptive thresholds proposed were the following:
where
and
are the upper and lower bounds of the thresholds, respectively.
,
,
.
and
are the offset of the adaptive thresholds, where
,
.
is given as
According to the subsystems (
20), (
22), and the designed UIO (
26), there is
A set of residual signals can be calculated as
. Then, the following FD conditions are given as follow:
where
. In combination with the subsystem (
20), it can be seen that the residuals
and
were caused by actuator fault and sensor fault, respectively. Therefore, the actuator fault and sensor fault in the system could be detected, respectively.
For ease of analysis, define
. According to Theorem 1, the estimation of the disturbances in system (
19)
converge to
as the observation errors in (
25) converge to zero. Further, the estimation of disturbances in system (
20) can be expressed as
. Thus,
can be obtained. Then, the estimation of disturbances in the original system can be expressed as
.
Similarly, according to the system (
9), define
,
. According to Theorem 1, the estimation of the disturbances in system (
20)
converge to
. Further, the estimation of disturbances in system (
20) can be expressed as
. Thus, it can be obtained that
. Let
. According to (
13), the estimation of faults in the original system can be expressed as:
4. Fault-Tolerant Cooperative Control Scheme Design
Considering state constraint, a fixed-time FTCC law is designed, based on backstepping control, in this subsection.
Define
as the position vector of the leader. Define
as the position vector of the follower UAV#
i,
. The expected relative position between UAVs is defined as
. Thus, the cooperative formation position error is defined as:
Further, by taking the communication network into account, the generalized position tracking error of the
ith UAV is given as:
where
.
,
represents the neighbor set of the
ith UAV. Then, let
.
The state transformation with scaling function is proposed to keep the state variables within corresponding constraints. Define:
where
.
is the estimation of
,
is the absolute value of lower bound of
,
is the absolute value of upper bound of
. Then, the constraint of
can be ensured, while the boundedness of
is ensured. Thus, state
satisfied
if its initial condition satisfying
.
Taking the derivative of
provides:
where
,
,
,
,
.
Choose the TBLF as:
where
is a constant. Then, the position tracking error
, can be limited and satisfies
if
holds.
By differentiating (
48), one yields:
where
.
.
, is the virtual control signal to be designed.
Then, based on (
49), the virtual control signal is designed as:
where
is the estimation of
, which contains the estimation of state variables.
is the estimation of
.
and
are designed parameter matrices,
,
.
,
are designed parameters, which satisfies
,
.
.
Define
. Furthermore, considering the introduced sensor fault (
6), the desired reference of
is developed as:
where
is the estimation of the sensor fault.
A new variable
is introduced to avoid direct differentiation of
by using dynamic surface control [
41]. Then, a nonlinear filter is proposed as follows:
where
is a designed parameter matrix,
.
,
are positive constants.
Define
. Choose the Lyapunov function as:
By differentiating (
53), one yields:
where
,
.
Finally, the FTCC law is designed as:
where
is the nonlinear function containing the estimation of state variables.
is the estimation of the actuator fault.
is the estimation of
.
and
are parameter matrices to be designed,
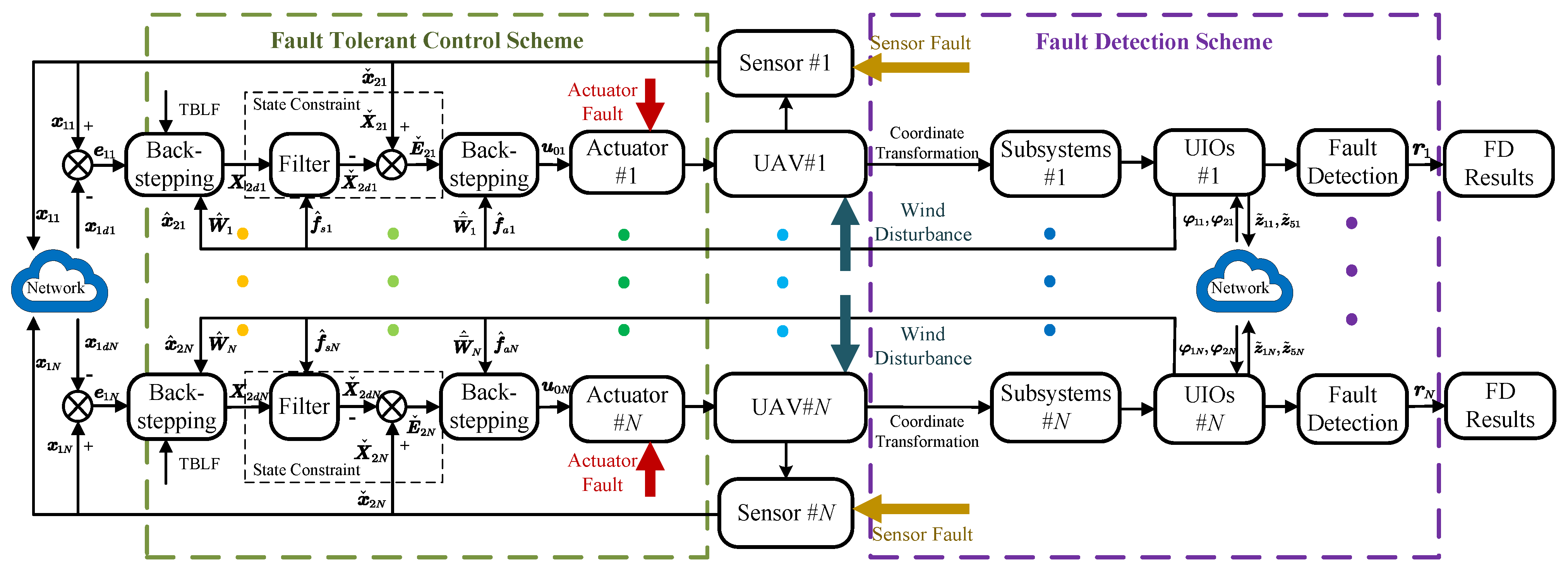
. In conclusion, the developed scheme is shown in
Figure 1.
Theorem 2. Consider a group of fixed-wing UAVs (1)–(2) under actuator fault (5), sensor fault (6), and wind disturbances. If the state transformation (46) and TBLF (48) are adopted to keep the state variables and position tracking errors within their constraints, the filter is proposed as (52), the control laws are designed as (50), (51), (55), and, then, the fixed-wing UAVs can keep cooperative formation flight and the errors of the multi-UAVs system are fixed-time convergent. Proof. Select the Lyapunov function as:
By considering (
49), (
51), (
54), (
55), differentiating (
56), and using Young’s inequality, one yields:
where
,
,
is the estimation error of
,
is the estimation error of
,
is a positive constant, which is assumed to satisfy
.
Further, choosing
and
, one can obtain:
where
,
,
.
represents the minimum eigenvalue of the matrix.
is assumed to be the upper bound of
.
According to Lemma 1, the error signals of the multi-UAV system are fixed-time bounded and convergent, wherein can converge to the following set , and the setting time is presented as with .
This completes the proof of Theorem 2. □
5. Simulation Results
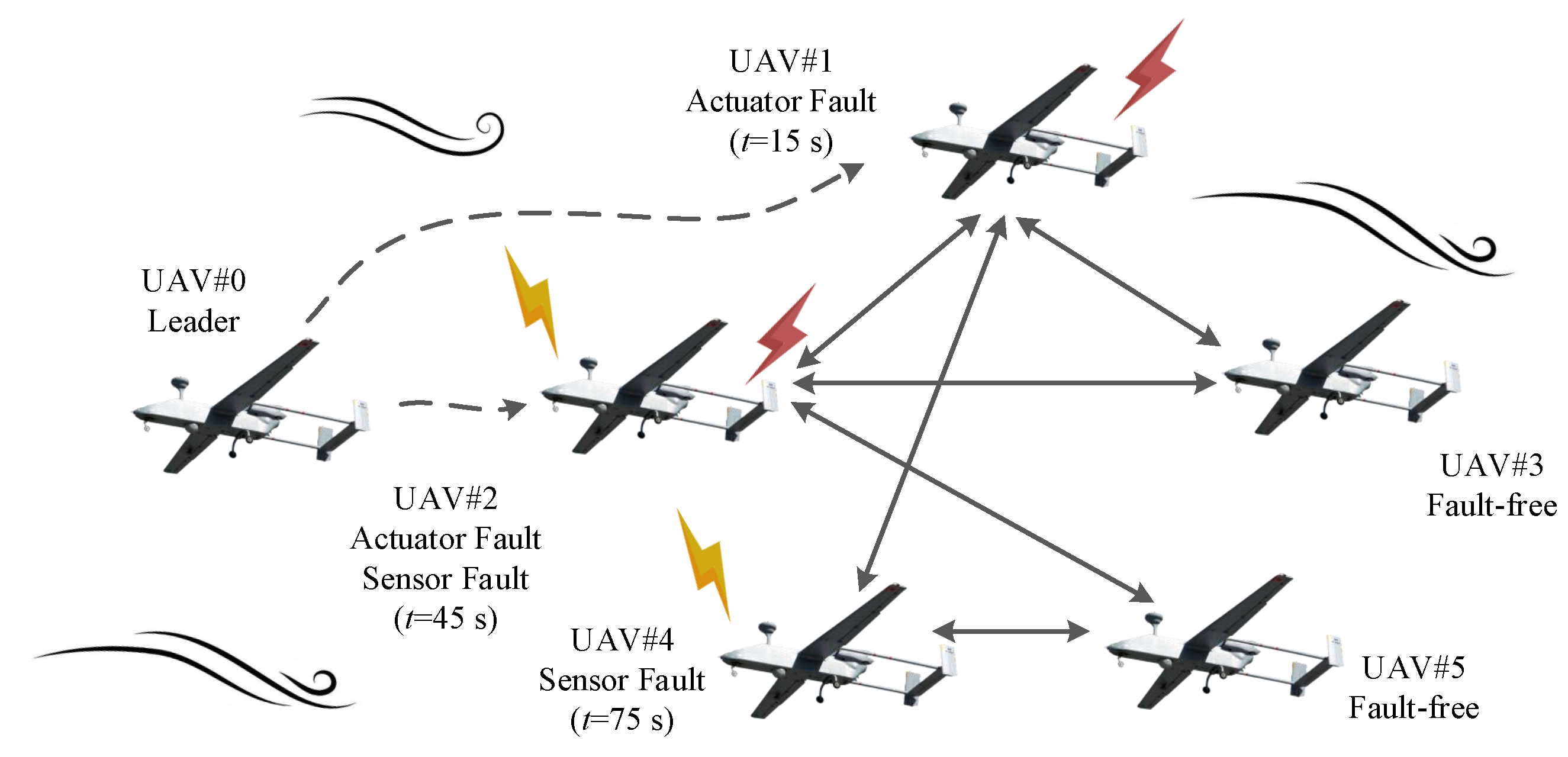
The effectiveness of the designed FD and FTCC scheme was verified by means of simulations described in this section. The structure and aerodynamic parameters of fixed-wing UAVs referred to [
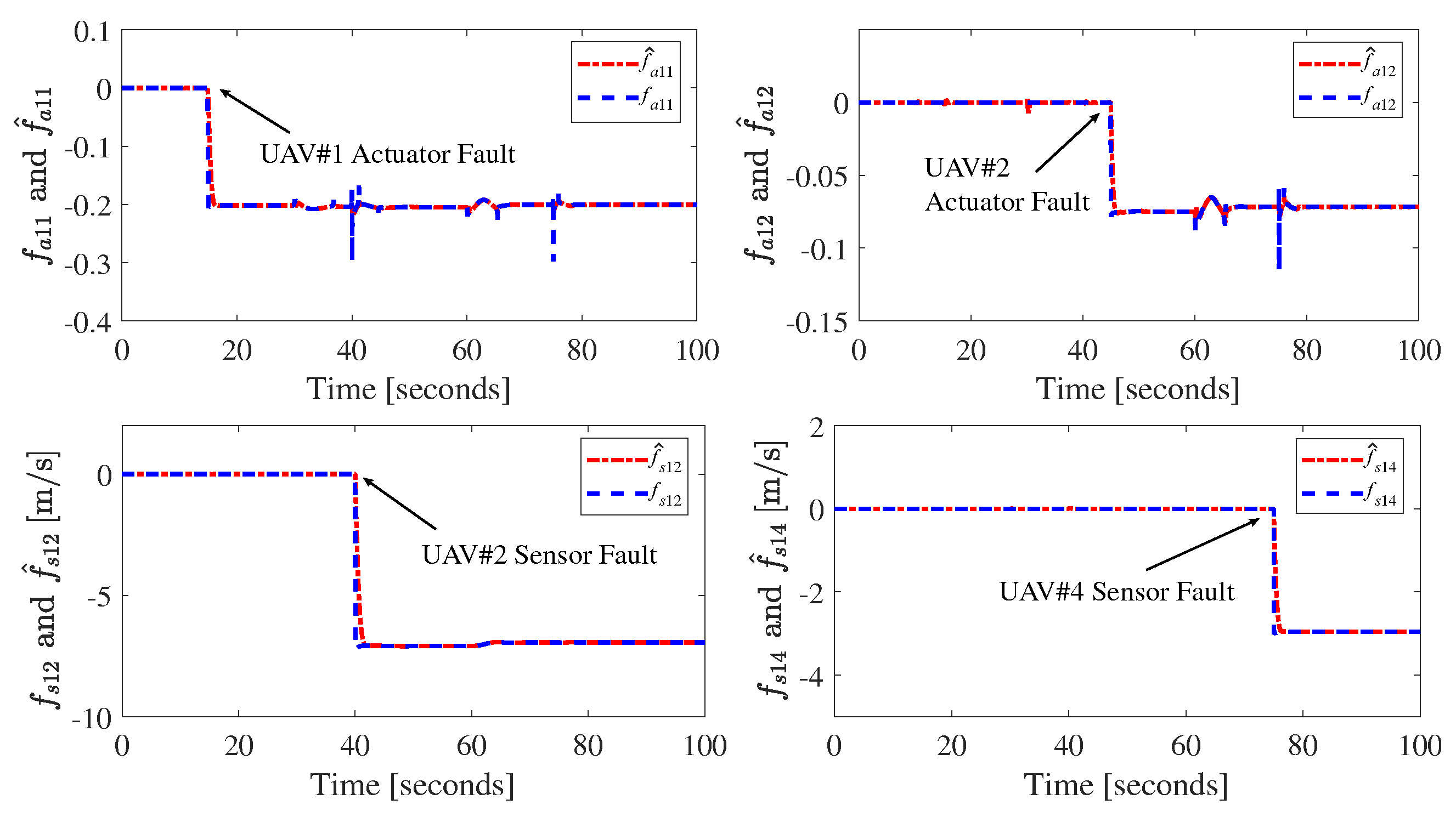
42]. In the simulations, actuator faults were encountered by UAV
at
s and by UAV
at
s, respectively. Sensor faults were encountered by UAV
at
s and by UAV
at
s, respectively. The actuator and sensor faults are given in
Table 1. Wind disturbances were encountered by the UAVs at
s in the simulations,
,
, and
are given in
Table 2.
The chosen design control parameters were
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
. The parameters for UIOs are designed as
,
,
,
,
,
,
,
,
. The parameter for FD was designed as
. The initial conditions of fixed-wing UAVs were
m,
m,
m,
m,
m,
m,
,
,
. The expected value of the relative position between fixed-wing UAVs are shown in
Table 3. The trajectory of the leader was given by
= [30t
]
m. The communication topology of the UAVs is shown in
Figure 2. Thus, the Laplacian matrix and leader adjacency matrix could be calculated as:
Solving the matrix inequality (
30) by means of the LMI toolbox, matrices
and
could be calculated as:
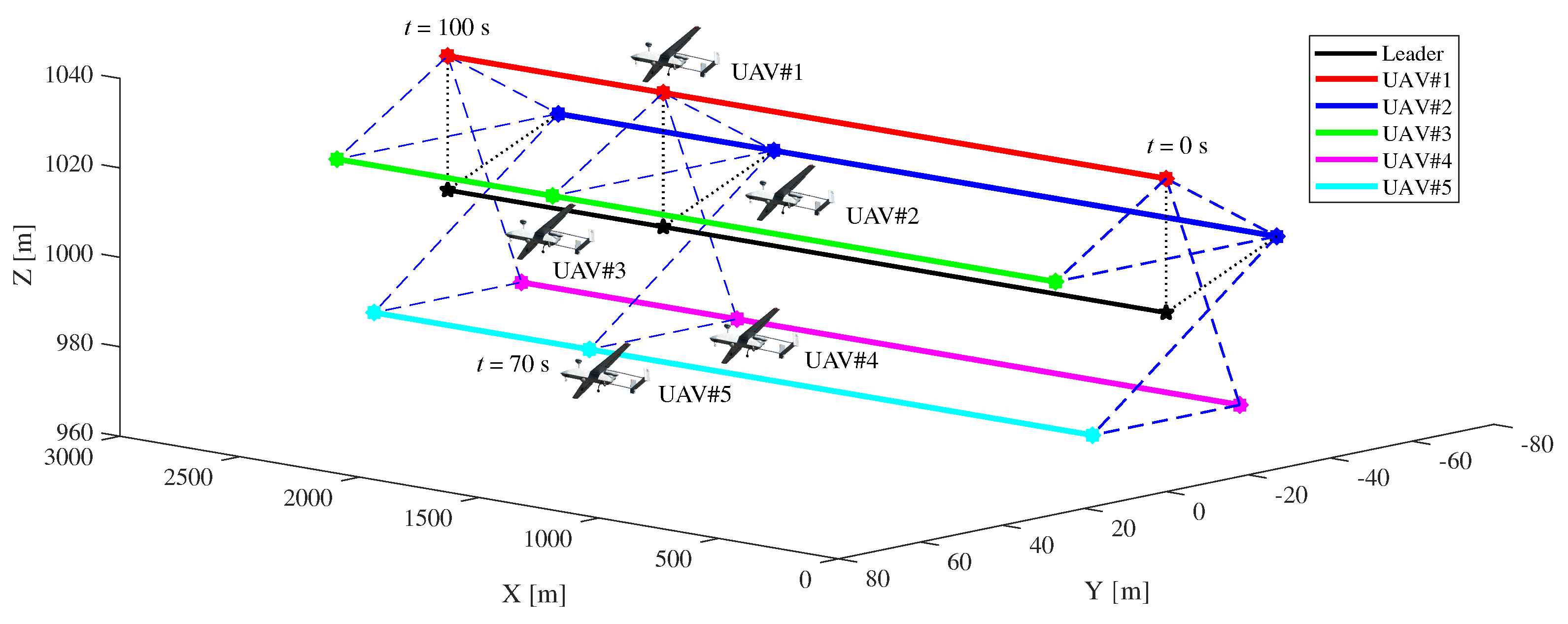
Figure 3 illustrates the flight paths of multi-UAVs. It can be seen that the fixed-wing UAVs kept cooperative formation flight even if the multi-UAV system was subjected to actuator faults, sensor faults, and wind disturbances. The thrust throttle setting of UAV
(
is presented in
Figure 4. The control inputs enabled a quick response as the faults and disturbances were encountered.
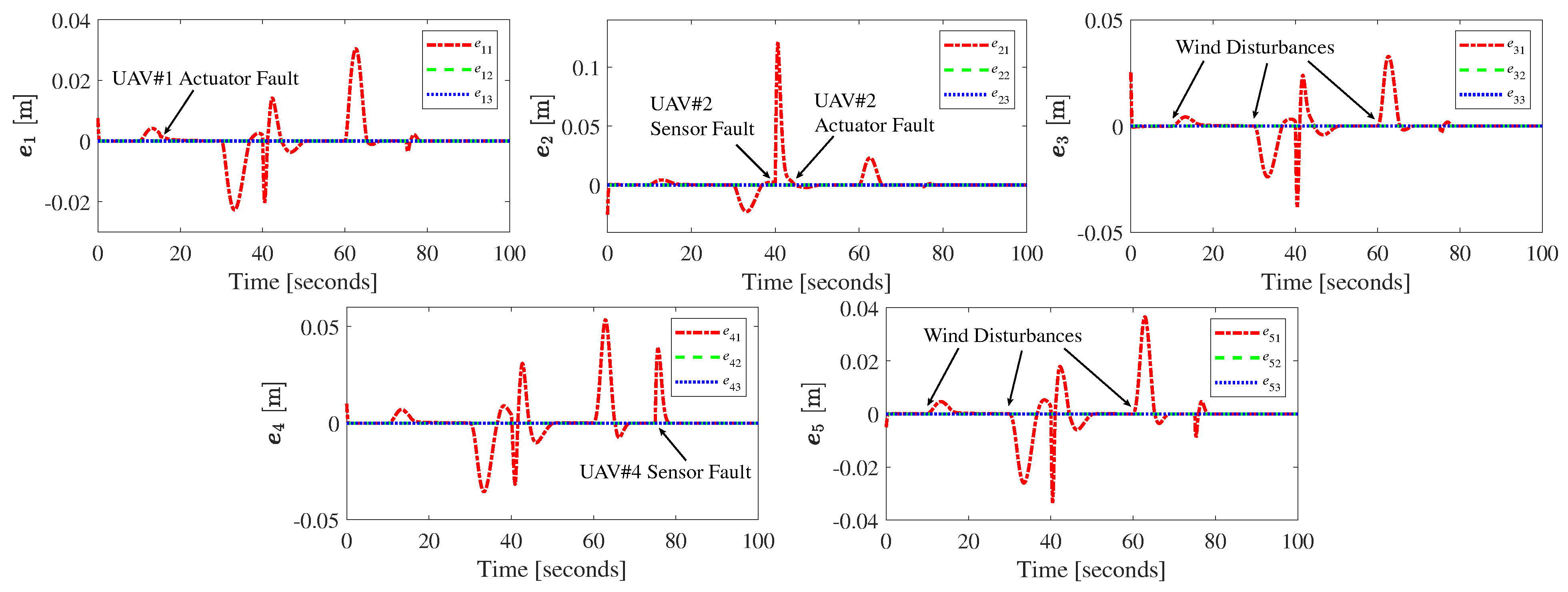
Figure 5 demonstrates the generalized position tracking errors of the
ith UAV, and it can be observed that the errors were convergent to a neighborhood containing zero.
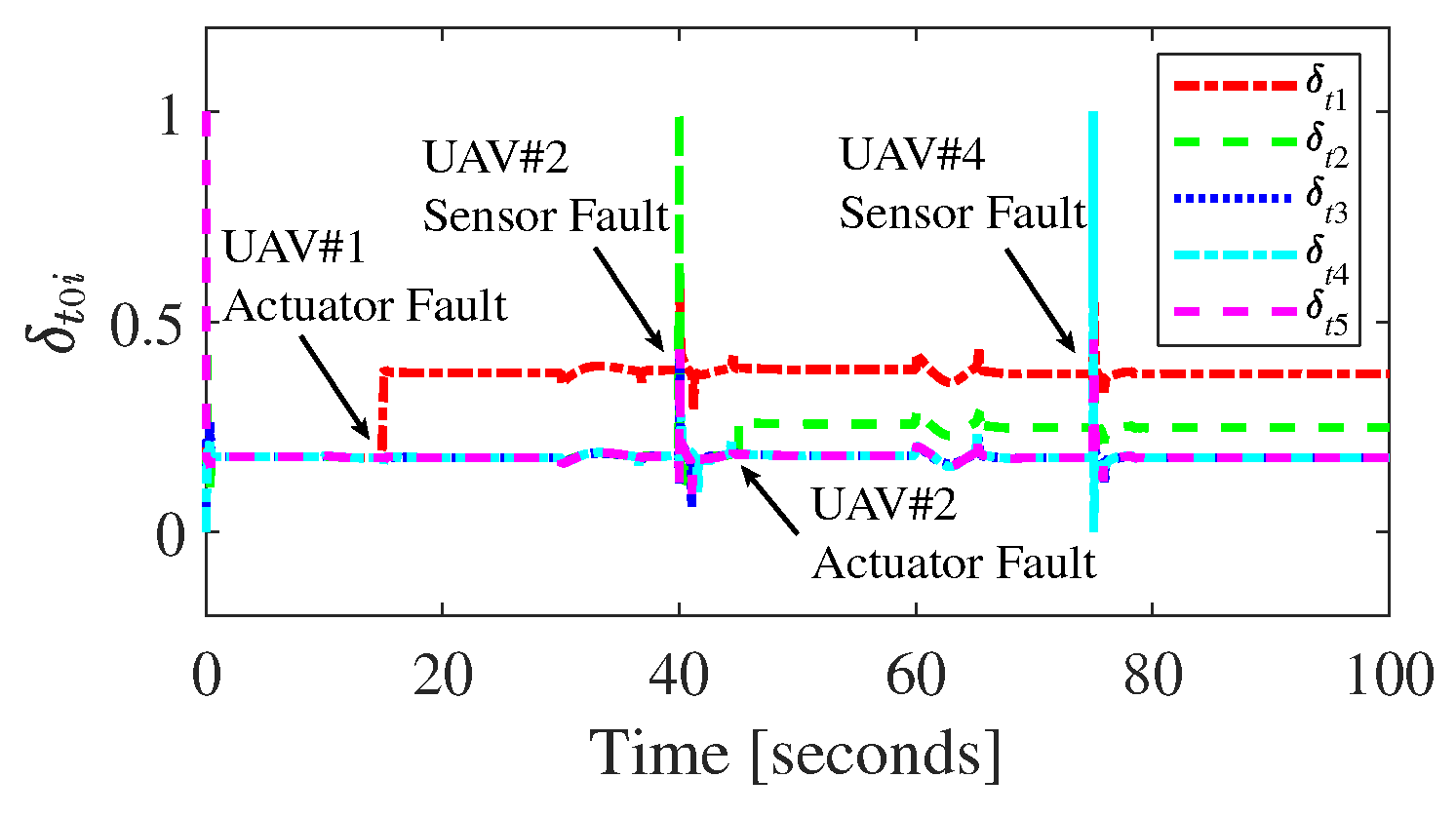
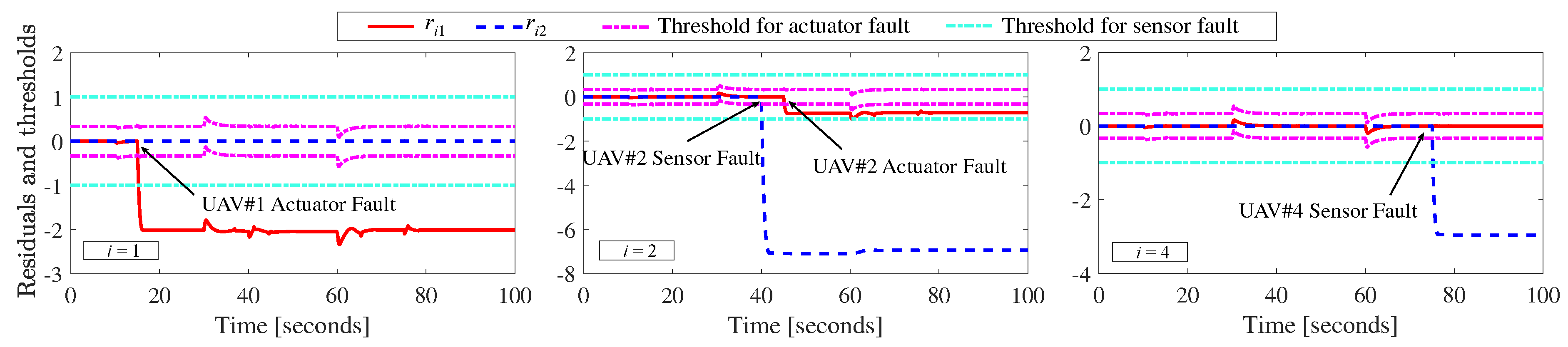
Figure 6 shows the residuals and thresholds of UAV
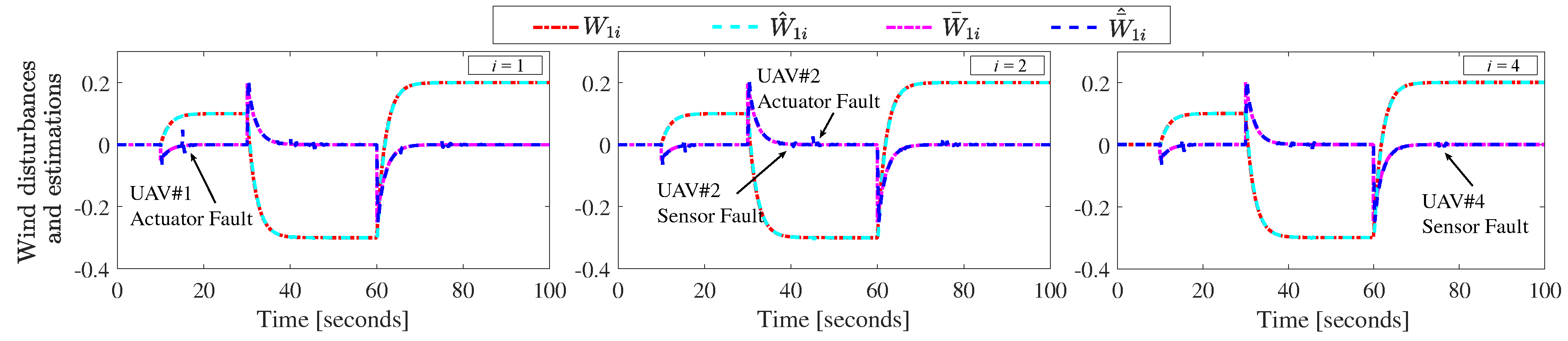
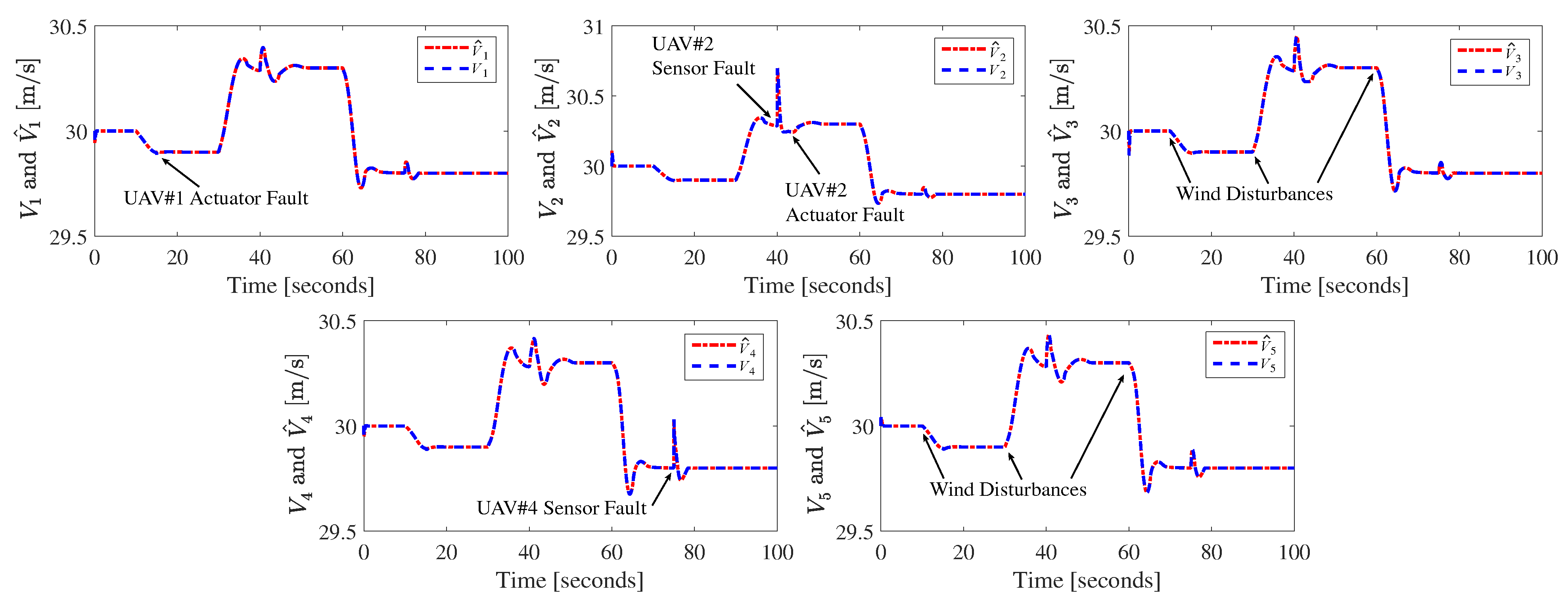
for the FD unit, respectively. It can be seen from the FD results that the residual functions for actuator fault and sensor fault exceeded the corresponding FD thresholds when an actuator fault or a sensor fault occurred. Meanwhile, the residual signals were smaller than the corresponding FD thresholds if no faults occurred. Therefore, the occurrence of actuator and sensor faults could be promptly detected by utilizing the designed FD scheme. The estimations of wind disturbances, airspeed, and faults are demonstrated in
Figure 7,
Figure 8, and
Figure 9, respectively. It can be observed that the developed cooperative UIOs had excellent observation capabilities. The states of the multi-UAV system, disturbances, and faults approximated rapidly and accurately. Furthermore, it was found from the above simulation results that the flight performance of UAVs was affected if neighboring UAVs sufferred from faults.
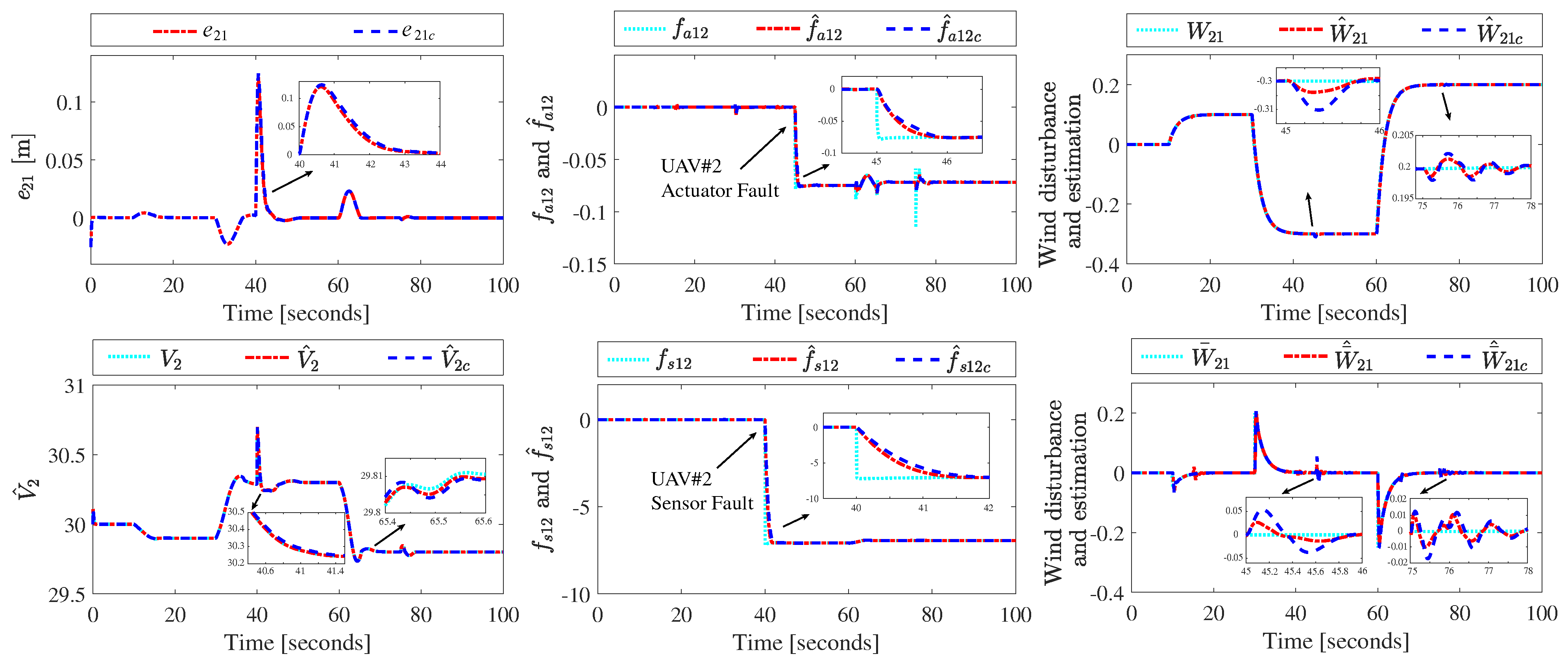
The comparative simulations between the proposed cooperative FD scheme and the individual FD scheme demonstrated the superiority of the proposed scheme. Note that the comparative individual FD scheme was derived by removing cooperative terms, including
and
from the UIOs. Consider the fact that UAV
simultaneously encountered actuator and sensor faults, only the generalized position tracking error and estimations of the velocity, faults, and wind disturbances of UAV
are presented to show the superiority of the developed method. It can be seen from
Figure 10 that the convergence rate of tracking errors under the developed method was faster than the comparative scheme. Therefore, one can conclude that the performance of the developed FD scheme is enhanced by introducing cooperative terms.
6. Conclusion and Future Work
In this study, the FD and FTCC schemes were propounded for multiple fixed-wing UAVs against actuator faults, sensor faults, and wind disturbances. In the FD unit, the faulty UAV model with wind disturbances was linearized and the system was converted into two subsystems by using state and output transformations. Then, cooperative UIOs were developed to estimate the states, faults, and disturbances. The adaptive thresholds were designed to detect actuator and sensor faults by using the observers’ estimations. In the FTCC unit, state constraints were considered. Furthermore, backstepping-based fixed-time FTCC laws were proposed for multi-UAVs suffering from actuator faults, sensor faults, and wind disturbances. Lyapunov analysis proved the fixed-time convergence of the tracking errors in the multi-UAV system. The simulation results showed the effectiveness of the FD and FTCC strategies.
In the current study, only the effectiveness loss, deviation of thrust throttle setting, and pitot faults were considered in the FD and FTCC scheme design for the fixed-wing follower UAVs. As one of future works, more actuator and sensor faults, such as actuator stuck faults, will be investigated. Furthermore, the effects of faults and wind disturbances on real UAV testbeds with one leader UAV, or even multiple leader UAVs, will be considered in future research. Eventually, implementation and experimental tests of the proposed scheme on systems with real UAVs will be carried out.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}