
Deployment Method with Connectivity for Drone Communication Networks


Abstract
1. Introduction
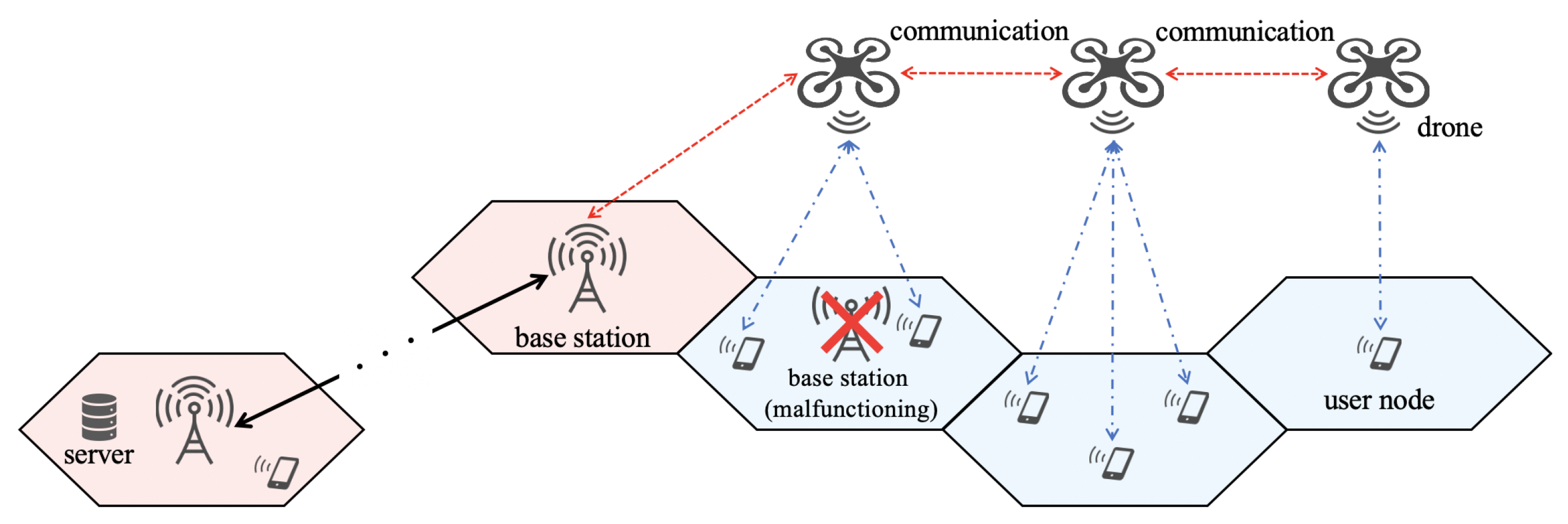
- We consider the connected drone placement problem; i.e., in which areas should drones be placed in order to connect drones to each other. By solving this problem, the coverage area can be extended and communications can be established even in areas beyond the range of the base station’s signal. This is useful for the collection of information after a disaster;
- To solve the connected drone placement problem, we formalized the ILP optimization problem and propose an ILP-based deployment method. As shown in Section 4, the ILP-based deployment method can realize efficient drone deployment;
- We propose a heuristic algorithm named the adjacent deployment method for large-scale networks. The computation time for our ILP optimization problem is generally huge because it is NP-hard. Therefore, the adjacent deployment method can be used to obtain the solution for large-scale networks for which it would be difficult for the ILP-based deployment method to obtain the solution.
2. Problem Formulation
- The completion time T is short;
- For each time slot, a connected graph is constructed with drones as nodes.
3. Proposed Method
3.1. ILP-Based Deployment
- Step 1.
- and ;
- Step 2.
- , , and ;
- Step 3.
- The maximum number of drones in each group is set to and the number of groups K is set to . Therefore, the drones are divided into K groups () as follows:
- Step 4.
- By solving the ILP problem, the placements () can be determined;
- Step 5.
- If , the procedure goes to step 6. Otherwise, k is updated to and the procedure returns to step 4;
- Step 6.
- , which is the set of users with satisfied connection requests according to the placements () when , is calculated. If , is updated to ;
- Step 7.
- If , the procedure goes to step 8. Otherwise, , , and the procedure returns to step 3;
- Step 8.
- t is updated to . is updated to . If the algorithm is stopped. Otherwise, the procedure returns to step 2.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
| Set of subareas | |
| Set of drones in groups (); i.e., | |
| Set of drones in group k | |
| Set of users for which no data have been collected by time t | |
| Minimum identification number of the drone included in | |
| Placement of drone d () | |
| Binary variable that is equal to 1 if user u is communicating with drone d; otherwise, 0 | |
| Variable that is equal to 1 if areas i and j are adjacent; otherwise, 0 | |
| Binary variable that is equal to 1 if drone d is deployed in area i; otherwise, 0 | |
| Binary variable that is equal to 1 if drones d and e deployed in areas i and j are communicating; otherwise, 0 | |
| Binary variable that is equal to 1 if drones d and e are communicating; otherwise, 0 | |
| Binary variable that is equal to 1 if user u is in area i; otherwise, 0 | |
| Binary variable that is equal to 1 if user u communicates with drone d and is in area i; otherwise, 0 | |
| M | Maximum number of users that a drone can communicate with |
| Maximum number of drones in group | |
| B | Area number of the base station |
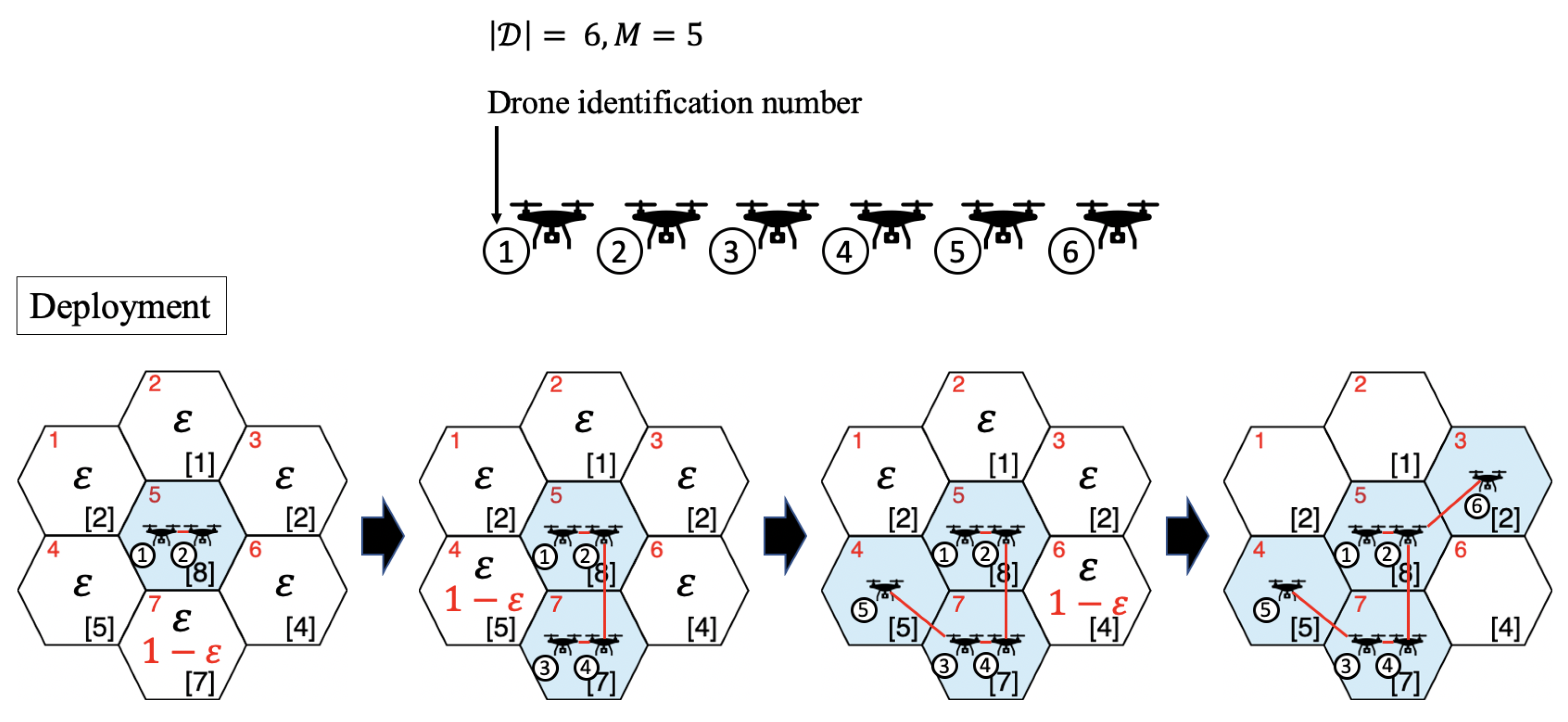
3.2. Adjacent Placement Method
- Step 1.
- . For , , where denotes the initial set of users with unsatisfied connection requests in subarea A;
- Step 2.
- , , and ;
- Step 3.
- The set of adjacent subareas with users with unsatisfied connection requests is updated to . If , subarea A is randomly chosen from with probability . In contrast, A is set to area with the largest number of users in with probability . When there are multiple subareas with the maximum number of users in , A is randomly chosen from among those areas. After the setting of A, drone d is assigned to and is updated to . Otherwise, the following steps are undertaken:
- Step 3.1.
- . and ;
- Step 3.2.
- is calculated;
- Step 3.3.
- If , the procedure goes to step 3.4. Otherwise, , is set to , and the procedure returns to step 3.2;
- Step 3.4.
- If , subarea A is randomly chosen from . We select the set of subareas , where subarea A is connected to one of the subareas in with the smallest number of hops. , and . Otherwise, subarea A is randomly chosen from . Drone d is assigned to and is updated to ;
- Step 4.
- If the number of users in subarea A is greater than M, multiple drones are deployed in subarea A. Specifically, if , drones are deployed to subarea A. In other words, drones are deployed to subarea A. Otherwise, drones are deployed to subarea A. d is updated to ;
- Step 5.
- If , the procedure goes to step 6. Otherwise, , and then the procedure returns to step 3;
- Step 6.
- Based on (), () is calculated, and is set to . If , the algorithm is stopped. Moreover, if , , and then the procedure returns to step 3. Otherwise, t is updated to , and then the procedure returns to step 2.
4. Performance Evaluation
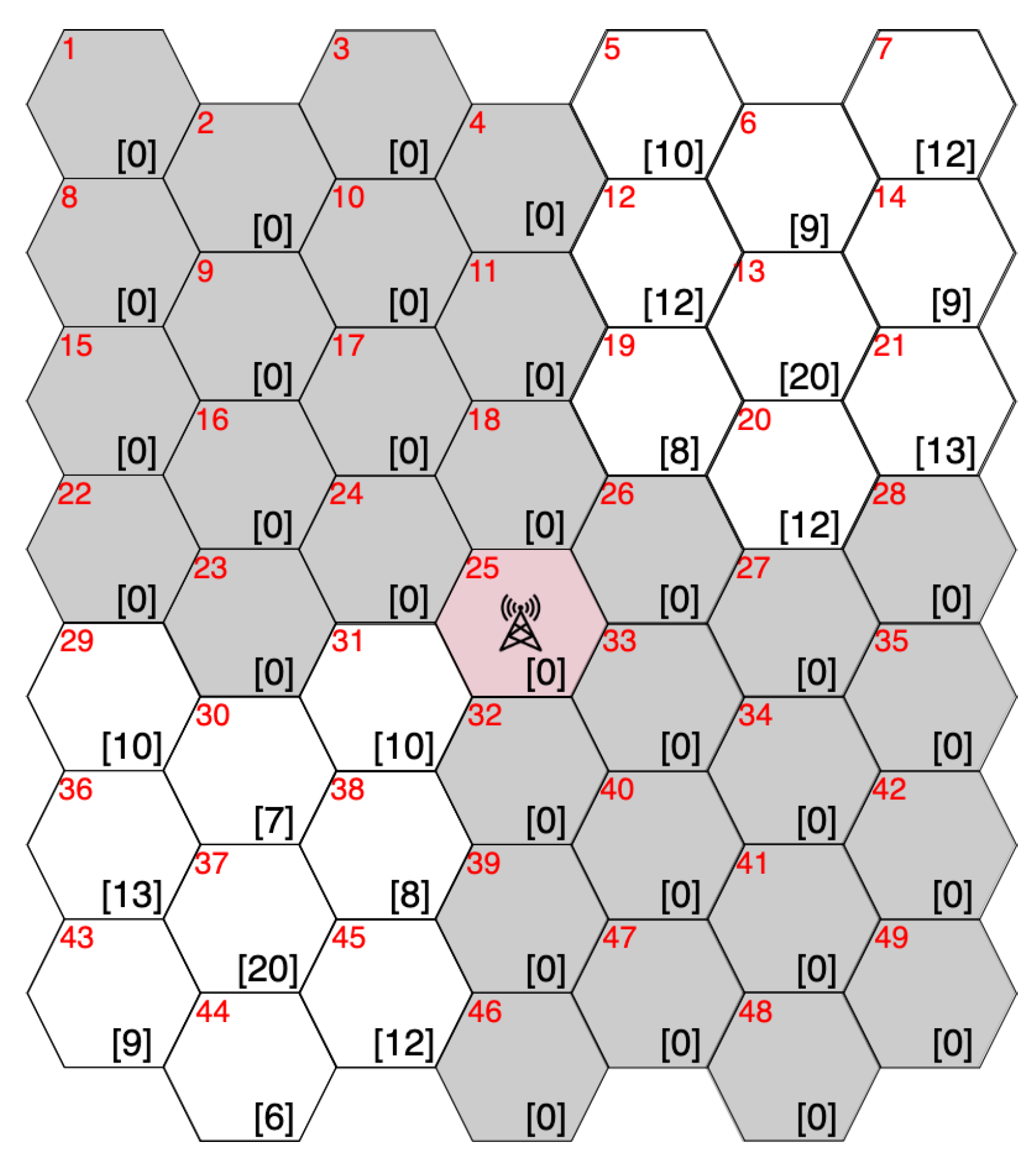
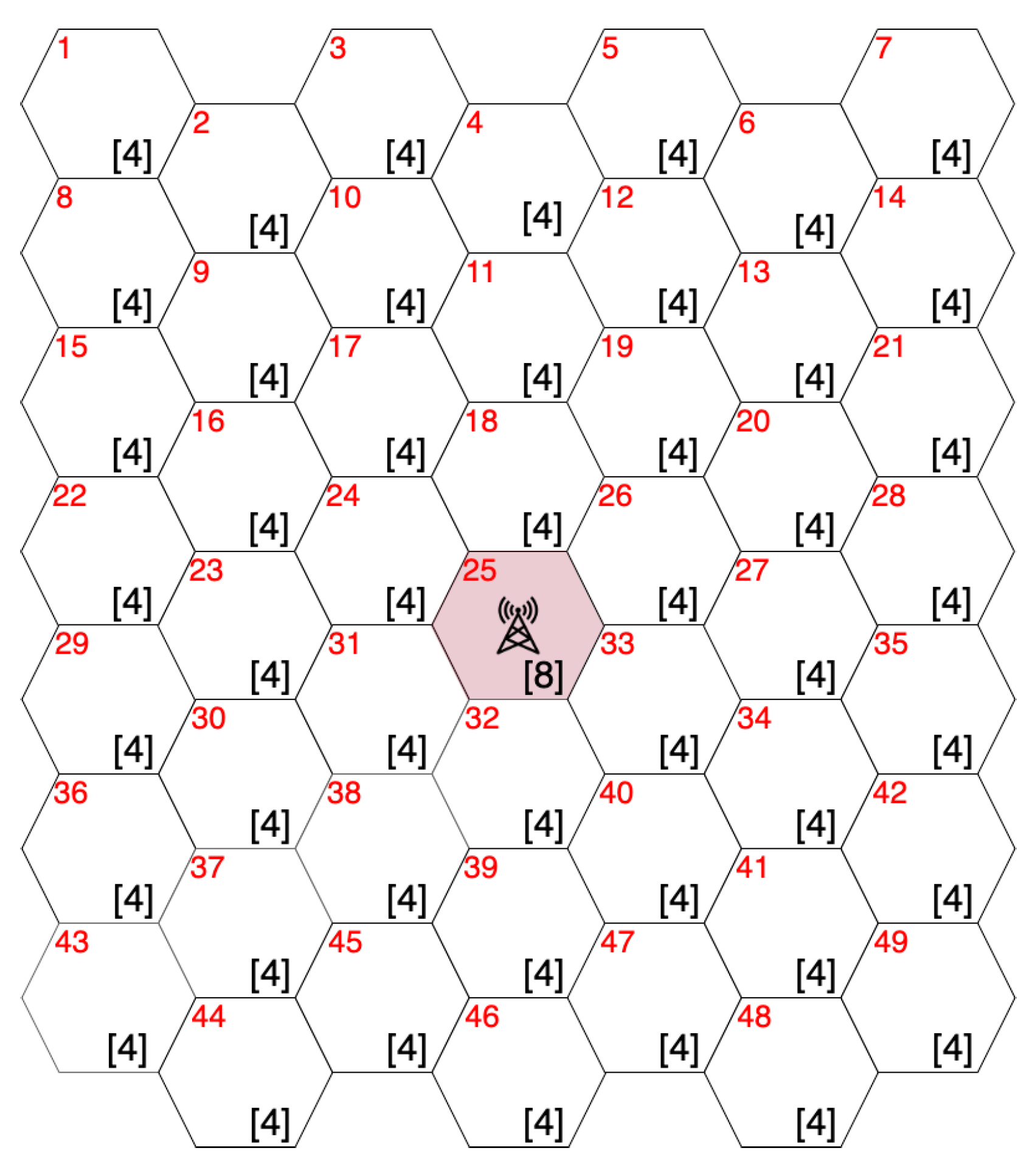
4.1. Evaluation Model
4.2. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, X.; Savkin, A.V. Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Future Internet 2021, 13, 174. [Google Scholar] [CrossRef]
- Yanmaz, E.; Yahyanejad, S.; Rinner, B.; Hellwagner, H.; Bettstetter, C. Drone networks: Communications, coordination, and sensing. Ad Hoc Netw. 2018, 68, 1–15. [Google Scholar] [CrossRef]
- Lim, S.; Chae, S.H.; Lee, H. RE-ORA: Residual Energy-Aware Online Random Access for Improving the Lifetime of Slotted ALOHA-Based Swarming Drone Networks. IEEE Access 2021, 9, 45504–45511. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, G.; Lei, Z.; Hwang, J.N. Eye in the sky: Drone-based object tracking and 3d localization. In Proceedings of the 27th ACM International Conference on Multimedia, Nice, France, 21–25 October 2019; pp. 899–907. [Google Scholar]
- Eichleay, M.; Evens, E.; Stankevitz, K.; Parker, C. Using the unmanned aerial vehicle delivery decision tool to consider transporting medical supplies via drone. Glob. Health Sci. Pract. 2019, 7, 500–506. [Google Scholar] [CrossRef]
- Aurambout, J.P.; Gkoumas, K.; Ciuffo, B. Last mile delivery by drones: An estimation of viable market potential and access to citizens across European cities. Eur. Transp. Res. Rev. 2019, 11, 30. [Google Scholar] [CrossRef]
- Lee, J.; Zhong, Z.; Kim, K.; Dimitrijevic, B.; Du, B.; Gutesa, S. Examining the applicability of small quadcopter drone for traffic surveillance and roadway incident monitoring. In Proceedings of the Transportation Research Board 94th Annual Meeting, Number 15-4184. Washington, DC, USA, 11–15 January 2015; p. 15. [Google Scholar]
- Bae, M.; Yoo, S.; Jung, J.; Park, S.; Kim, K.; Lee, J.Y.; Kim, H. Devising mobile sensing and actuation infrastructure with drones. Sensors 2018, 18, 624. [Google Scholar] [CrossRef]
- Restas, A. Drone applications for supporting disaster management. World J. Eng. Technol. 2015, 3, 316. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E.; Chowdhury, K.R.; Akyildiz, I.F. Help from the sky: Leveraging UAVs for disaster management. IEEE Pervasive Comput. 2017, 16, 24–32. [Google Scholar] [CrossRef]
- Rashid, M.T.; Zhang, D.Y.; Wang, D. Socialdrone: An integrated social media and drone sensing system for reliable disaster response. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 218–227. [Google Scholar]
- Mishra, B.; Garg, D.; Narang, P.; Mishra, V. Drone-surveillance for search and rescue in natural disaster. Comput. Commun. 2020, 156, 1–10. [Google Scholar] [CrossRef]
- Alshabtat, A.I.; Dong, L. Low latency routing algorithm for unmanned aerial vehicles ad-hoc networks. Int. J. Electr. Comput. Eng. 2011, 5, 989–995. [Google Scholar]
- Forsmann, J.H.; Hiromoto, R.E.; Svoboda, J. A time-slotted on-demand routing protocol for mobile ad hoc unmanned vehicle systems. Unmanned Syst. Technol. IX SPIE 2007, 6561, 530–540. [Google Scholar]
- Lee, W.; Lee, J.Y.; Lee, J.; Kim, K.; Yoo, S.; Park, S.; Kim, H. Ground control system based routing for reliable and efficient multi-drone control system. Appl. Sci. 2018, 8, 2027. [Google Scholar] [CrossRef]
- Park, S.; Kim, H.T.; Kim, H. Energy-efficient topology control for UAV networks. Energies 2019, 12, 4523. [Google Scholar] [CrossRef]
- Shang, B.; Liu, L.; Ma, J.; Fan, P. Unmanned aerial vehicle meets vehicle-to-everything in secure communications. IEEE Commun. Mag. 2019, 57, 98–103. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Xu, M. The coverage problem in UAV network: A survey. In Proceedings of the Fifth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Hefei, China, 11–13 July 2014; pp. 1–5. [Google Scholar]
- Ahmed, A.; Awais, M.; Akram, T.; Kulac, S.; Alhussein, M.; Aurangzeb, K. Joint placement and device association of UAV base stations in IoT networks. Sensors 2019, 19, 2157. [Google Scholar] [CrossRef] [PubMed]
- Tuba, E.; Capor-Hrosik, R.; Alihodzic, A.; Tuba, M. Drone placement for optimal coverage by brain storm optimization algorithm. In International Conference on Hybrid Intelligent Systems, Proceedings of the 17th International Conference on Hybrid Intelligent Systems (HIS 2017), Delhi, India, 14–16 December 2017; Springer: Cham, Switzerland, 2017; pp. 167–176. [Google Scholar]
- Sabino, S.; Horta, N.; Grilo, A. Centralized unmanned aerial vehicle mesh network placement scheme: A multi-objective evolutionary algorithm approach. Sensors 2018, 18, 4387. [Google Scholar] [CrossRef]
- Sabino, S.; Grilo, A. NSGA-II based Joint Topology and Routing Optimization of Mesh Networks with Flying Access Points. Procedia Comput. Sci. 2019, 160, 165–172. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Song, H.Y. A method of mobile base station placement for high altitude platform based network with geographical clustering of mobile ground nodes. In Proceedings of the 2008 International Multiconference on Computer Science and Information Technology, Wisla, Poland, 20–22 October 2008; pp. 869–876. [Google Scholar]
- Lyu, J.; Zeng, Y.; Zhang, R.; Lim, T.J. Placement optimization of UAV-mounted mobile base stations. IEEE Commun. Lett. 2016, 21, 604–607. [Google Scholar] [CrossRef]
- Hu, Y.; Zhang, F.; Tian, T.; Ma, D. Placement optimisation method for multi-UAV relay communication. IET Commun. 2020, 14, 1005–1015. [Google Scholar] [CrossRef]
- Iellamo, S.; Lehtomaki, J.J.; Khan, Z. Placement of 5G drone base stations by data field clustering. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Iranmanesh, S.; Abkenar, F.S.; Raad, R.; Jamalipour, A. Improving throughput of 5G cellular networks via 3D placement optimization of logistics drones. IEEE Trans. Veh. Technol. 2021, 70, 1448–1460. [Google Scholar] [CrossRef]
- Matsuda, T.; Kaneko, M.; Hiraguri, T.; Nishimori, K.; Kimura, T.; Nakao, A. Adaptive direction control for UAV full-duplex relay networks using multiple directional antennas. IEEE Access 2020, 8, 85083–85093. [Google Scholar] [CrossRef]
- IBM. CPLEX Optimizer. Available online: https://www.ibm.com/analytics/cplex-optimizer (accessed on 30 April 2023).














| Parameter | Value |
|---|---|
| Number of users | 400 |
| Number of subareas L | 25, 49, 81, 121, 169, 225 |
| Base station deployment area B | |
| Number of drones | 14 |
| Maximum number of users from which one | 5 |
| drone can collect data M |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Osumi, H.; Kimura, T.; Hirata, K.; Premachandra, C.; Cheng, J. Deployment Method with Connectivity for Drone Communication Networks. Drones 2023, 7, 384. https://doi.org/10.3390/drones7060384
Osumi H, Kimura T, Hirata K, Premachandra C, Cheng J. Deployment Method with Connectivity for Drone Communication Networks. Drones. 2023; 7(6):384. https://doi.org/10.3390/drones7060384
Chicago/Turabian StyleOsumi, Hirofumi, Tomotaka Kimura, Kouji Hirata, Chinthaka Premachandra, and Jun Cheng. 2023. "Deployment Method with Connectivity for Drone Communication Networks" Drones 7, no. 6: 384. https://doi.org/10.3390/drones7060384
APA StyleOsumi, H., Kimura, T., Hirata, K., Premachandra, C., & Cheng, J. (2023). Deployment Method with Connectivity for Drone Communication Networks. Drones, 7(6), 384. https://doi.org/10.3390/drones7060384