
Resource Allocation and Offloading Strategy for UAV-Assisted LEO Satellite Edge Computing



Abstract
1. Introduction
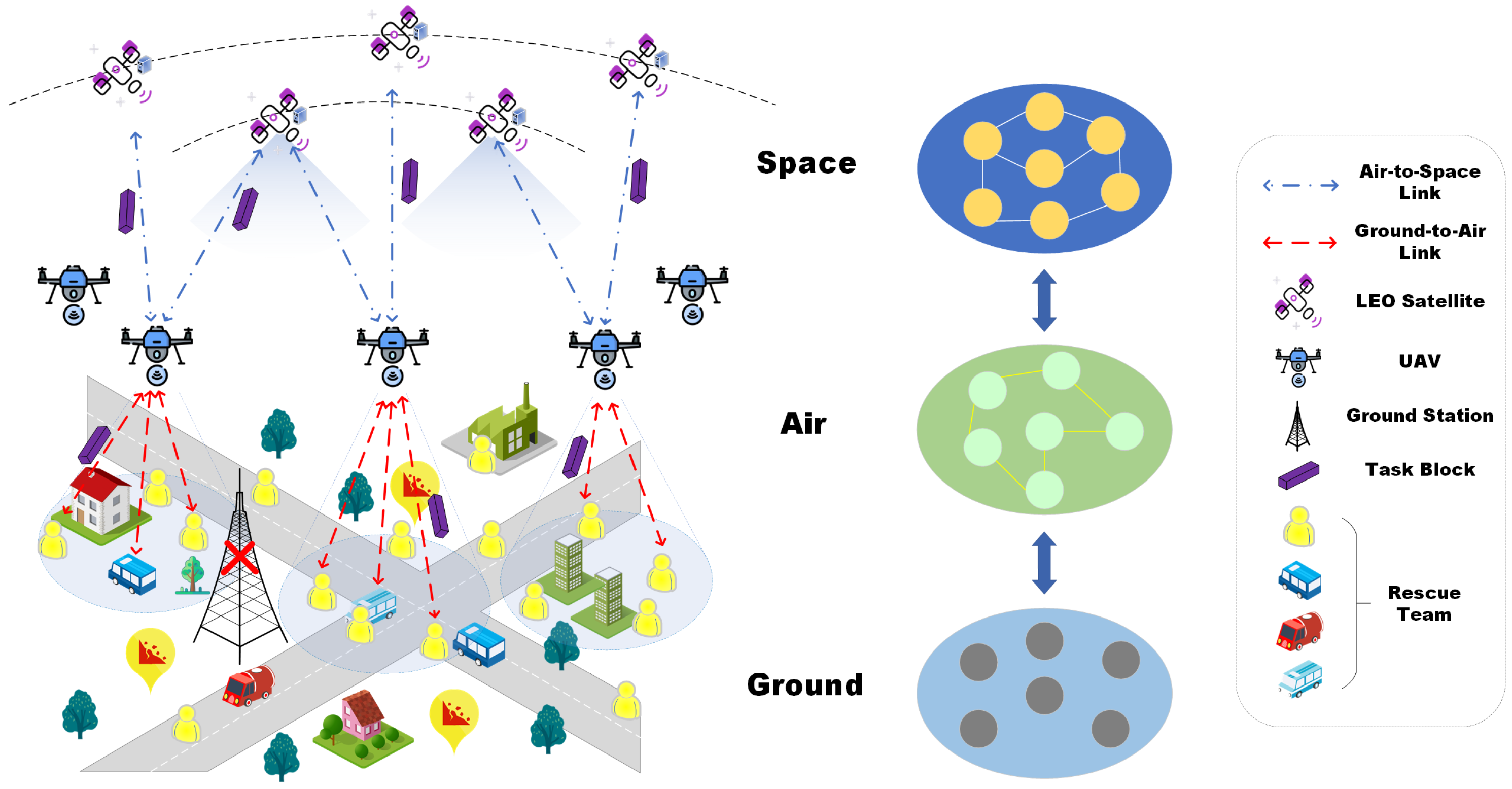
- A UAV-assisted air-space integrated task offload architecture is proposed in emergency scenarios, which jointly considers resource allocation and offloading schemes under the lack of ground resources of computing;
- A multi-satellite joint task offload scheme is proposed, which takes full advantage of satellite computing resources to complete the task with low delay and energy consumed;
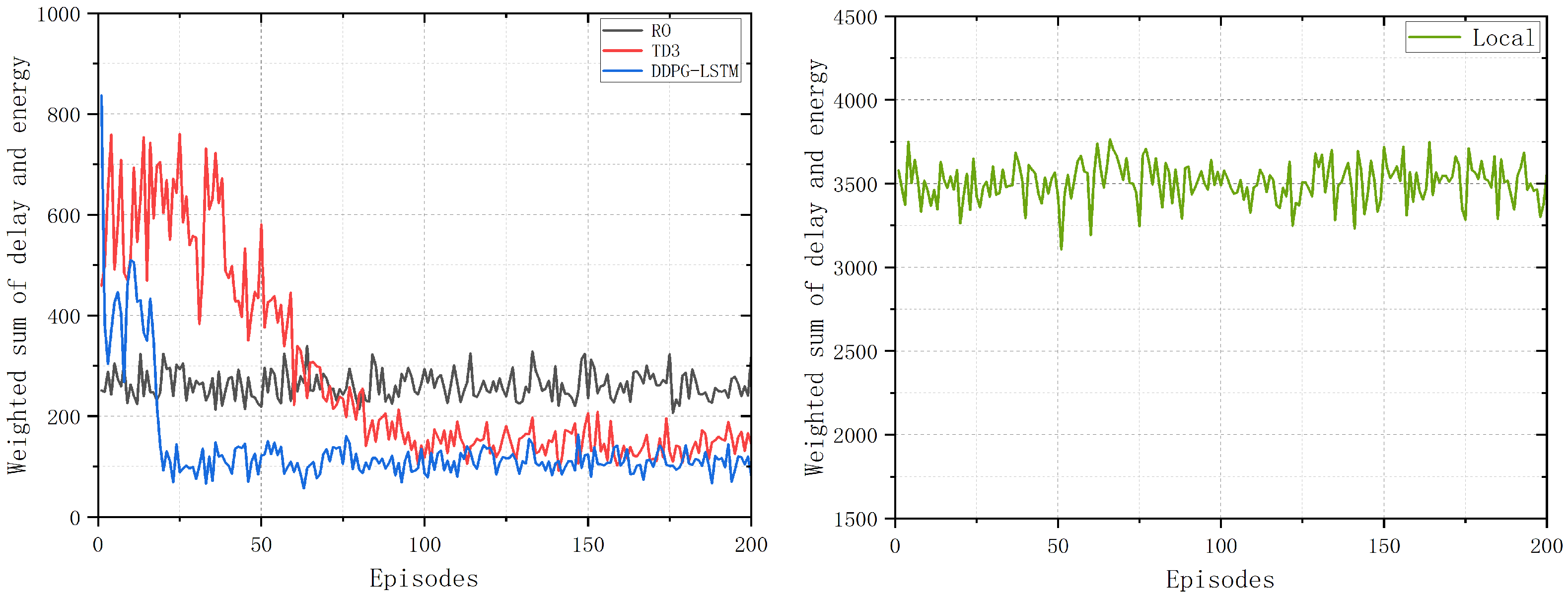
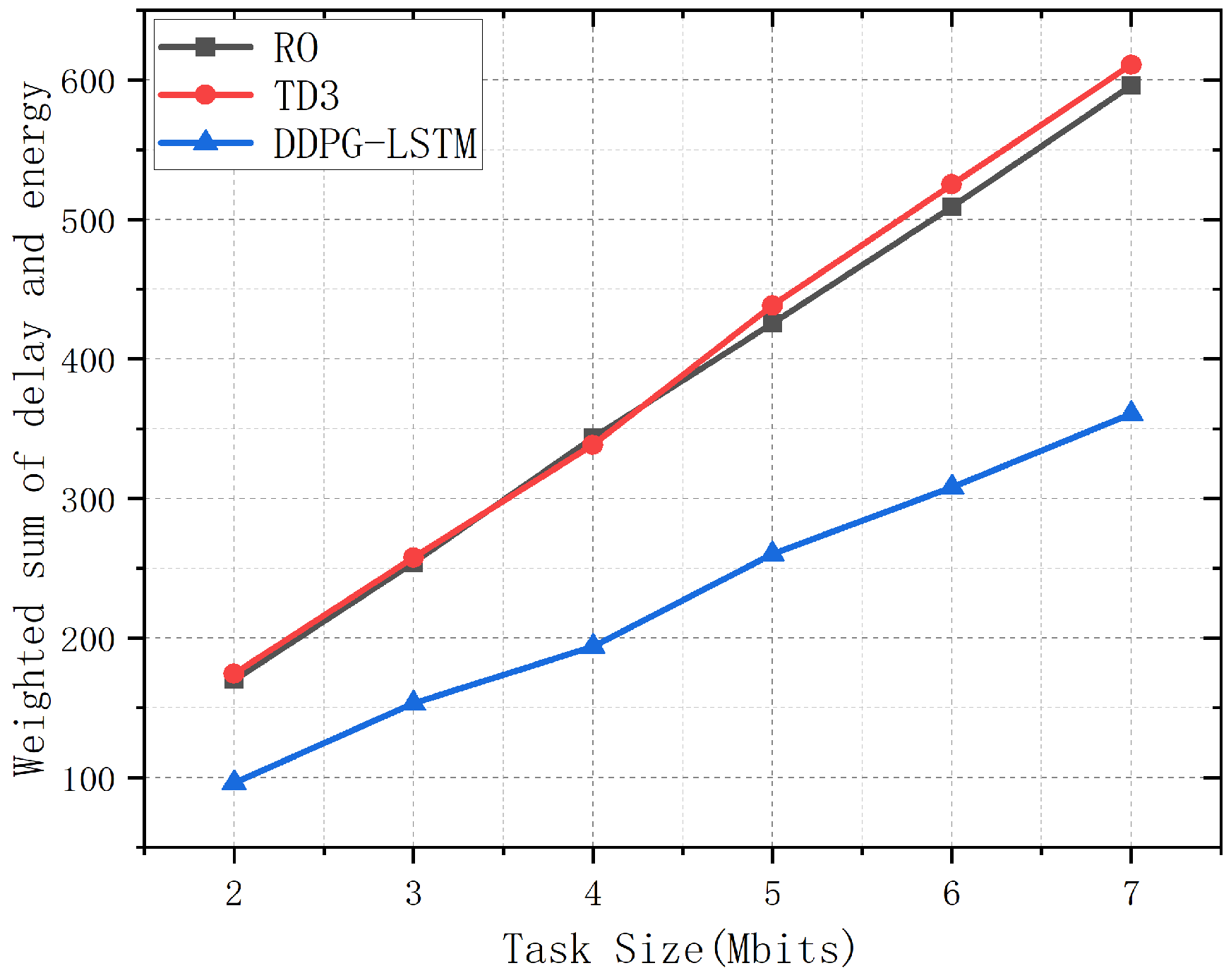
- A Deep Reinforcement Learning (DRL) algorithm is proposed, and simulation experiments prove the functionality of the algorithm, reducing the weighted sum of the energy consumed and delay by an average of 64.5%.
2. Related Work
3. System Model and Problem Description
3.1. Network Scenario
3.2. Architecture
3.3. Channel Model
3.3.1. IoT Device–UAV Channel
3.3.2. UAV-LEO Channel
3.3.3. Task Offloading and Computing
3.4. Problem Definition
4. Algorithm Design
4.1. Satellite Selection
Monte Carlo-Based Satellite Selection Algorithm
| Algorithm 1 Satellite selection algorithm |
|
4.2. Task and Computing Resource Allocation Strategy
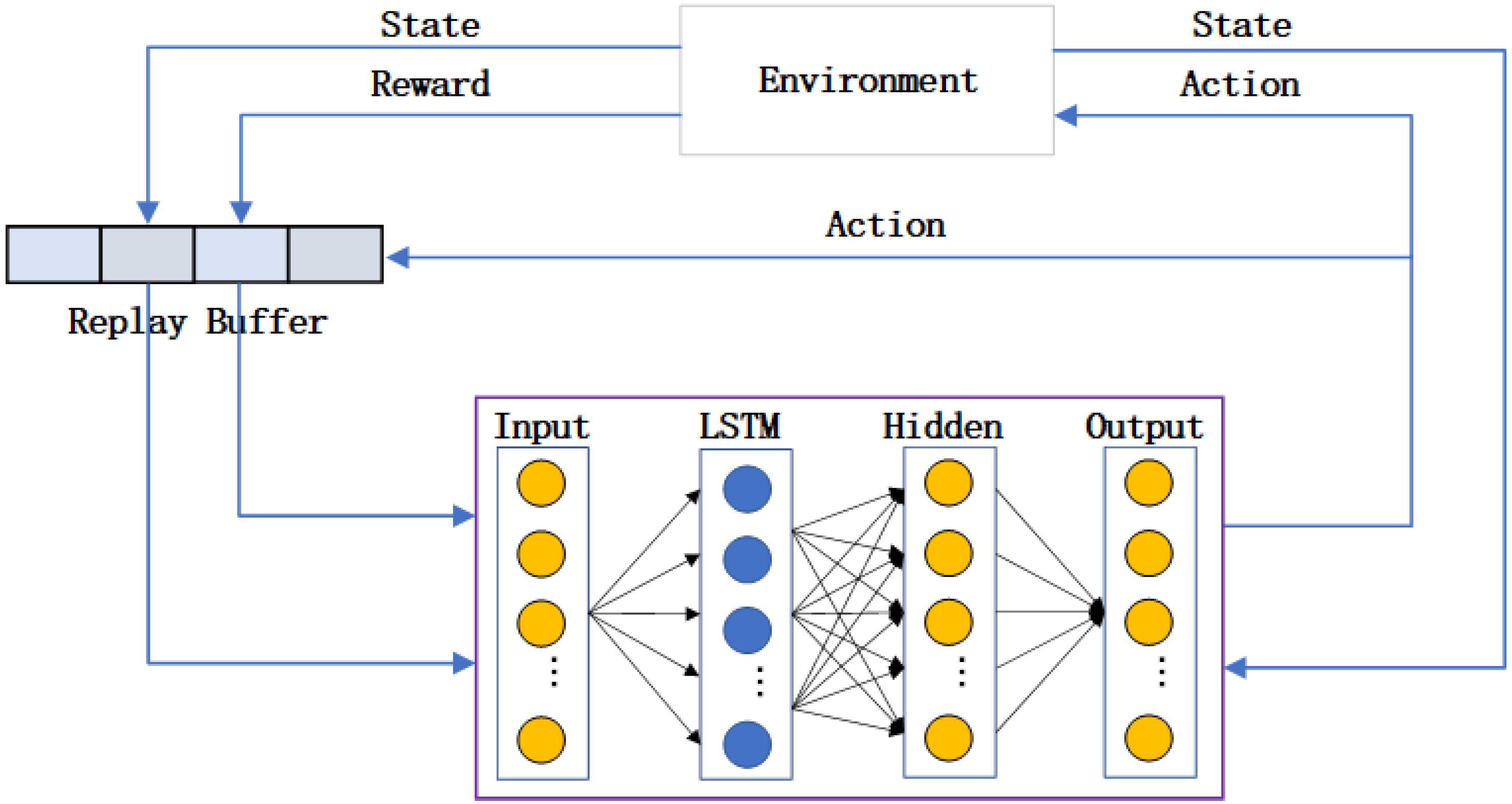
DDPG-Based Task Offloading and Resource Allocation Algorithm
- State
- Action.
- Reward.
| Algorithm 2 DDPG-LSTM-based task and resource allocation algorithm |
|
5. Performance Evaluation
5.1. Simulation Environment and Parameters
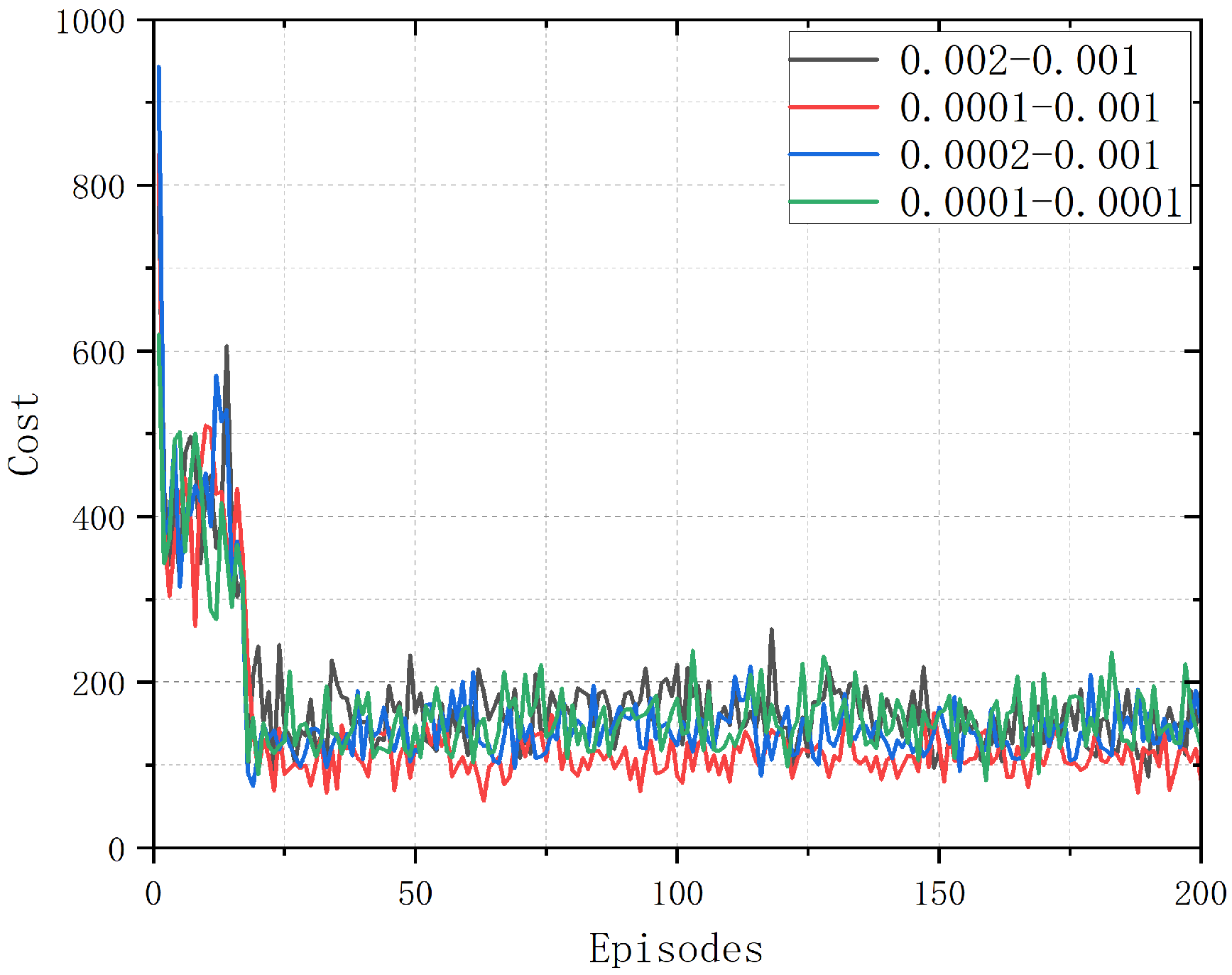
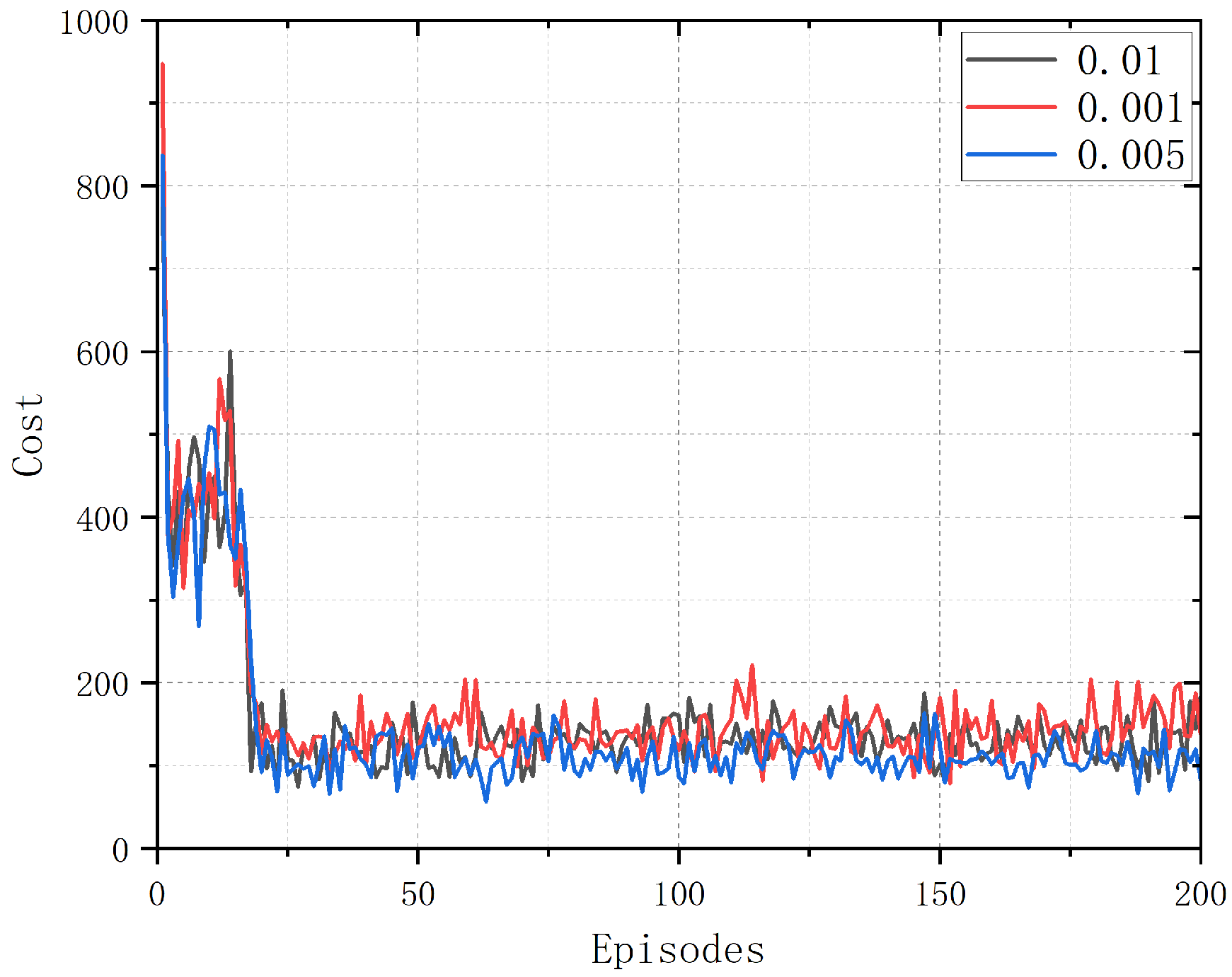
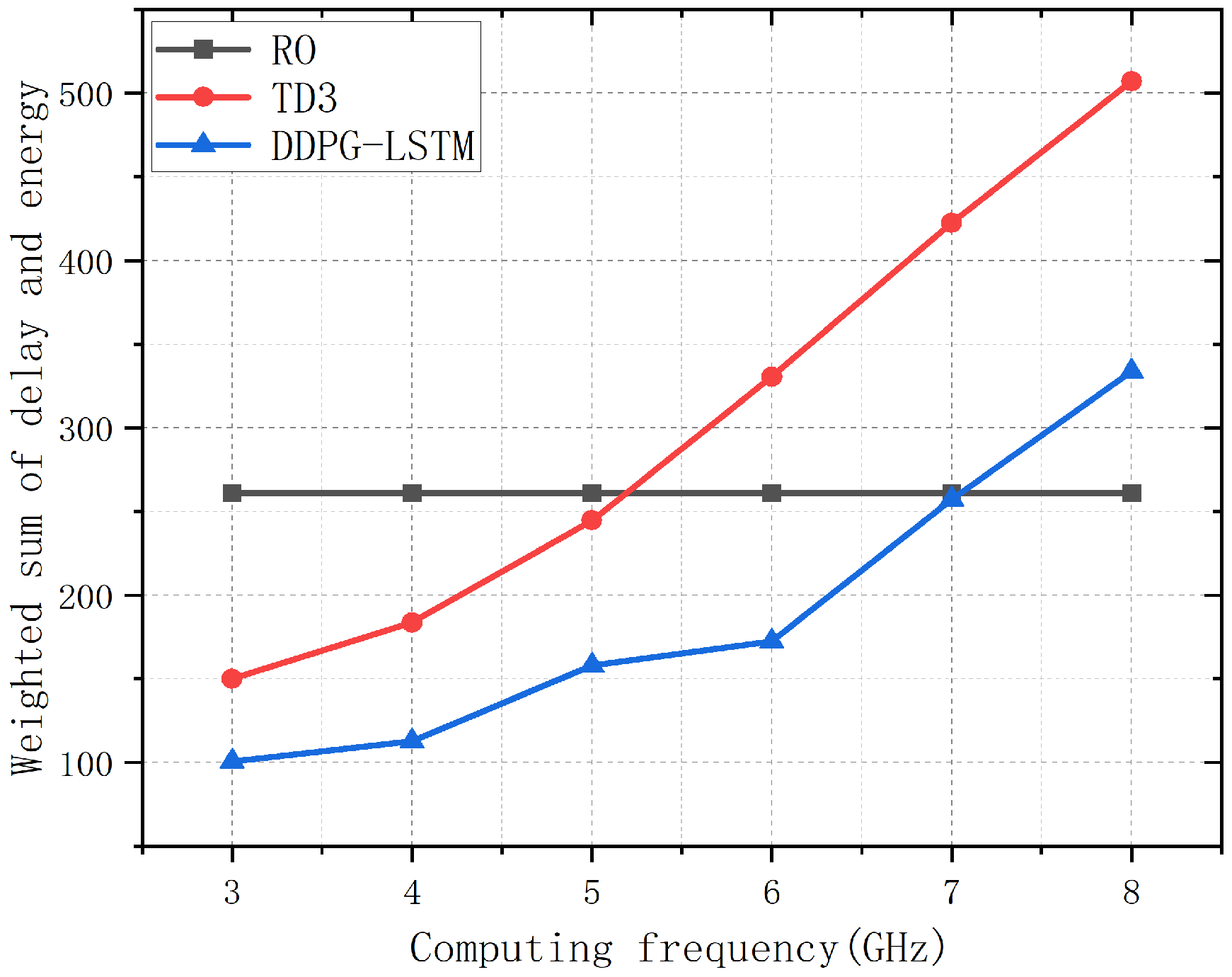
5.2. Performance Comparison
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Yang, Y.; Shang, B.; Zhang, P. Joint Resource Allocation and Multi-Part Collaborative Task Offloading in MEC Systems. IEEE Trans. Veh. Technol. 2022, 71, 8877–8890. [Google Scholar] [CrossRef]
- Luo, Q.; Luan, T.H.; Shi, W.; Fan, P. Deep Reinforcement Learning Based Computation Offloading and Trajectory Planning for Multi-UAV Cooperative Target Search. IEEE J. Sel. Areas Commun. 2023, 41, 504–520. [Google Scholar] [CrossRef]
- Shang, B.; Yi, Y.; Liu, L. Computing over Space-Air-Ground Integrated Networks: Challenges and Opportunities. IEEE Netw. 2021, 35, 302–309. [Google Scholar] [CrossRef]
- Jaiswal, K.; Dahiya, A.; Saxena, S.; Singh, V.; Singh, A.; Kushwaha, A. A Novel Computation Offloading Under 6G LEO Satellite-UAV-based IoT. In Proceedings of the 3rd International Conference on Computation, Automation and Knowledge Management (ICCAKM), Dubai, United Arab Emirates, 15–17 November 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Yu, K.; Cui, Q.; Zhang, Z.; Huang, X.; Zhang, X.; Tao, X. Efficient UAV/Satellite-assisted IoT Task Offloading: A Multi-agent Reinforcement Learning Solution. In Proceedings of the 27th Asia Pacific Conference on Communications (APCC), Jeju Island, Republic of Korea, 19–21 October 2022; pp. 83–88. [Google Scholar]
- Liu, Y.; Jiang, L.; Qi, Q.; Xie, S. Energy-Efficient Space–Air–Ground Integrated Edge Computing for Internet of Remote Things: A Federated DRL Approach. IEEE Internet Things J. 2023, 10, 4845–4856. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Le, L.B.; Girard, A. Computation Offloading, UAV Placement, and Resource Allocation in SAGIN. In Proceedings of the 2022 IEEE Globecom Workshops (GC Wkshps), Rio de Janeiro, Brazil, 4–8 December 2022; pp. 1413–1418. [Google Scholar] [CrossRef]
- Shang, B.; Shafin, R.; Liu, L. UAV Swarm-Enabled Aerial Reconfigurable Intelligent Surface (SARIS). IEEE Wirel. Commun. 2021, 28, 156–163. [Google Scholar] [CrossRef]
- Shang, B.; Liu, L. Mobile-Edge Computing in the Sky: Energy Optimization for Air–Ground Integrated Networks. IEEE Internet Things J. 2020, 7, 7443–7456. [Google Scholar] [CrossRef]
- Akter, S.; Kim, D.Y.; Yoon, S. Task Offloading in Multi-Access Edge Computing Enabled UAV-Aided Emergency Response Operations. IEEE Access 2023, 11, 23167–23188. [Google Scholar] [CrossRef]
- Wang, B.; Feng, T.; Huang, D. A Joint Computation Offloading and Resource Allocation Strategy for LEO Satellite Edge Computing System. In Proceedings of the IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 28–31 October 2020; pp. 649–655. [Google Scholar] [CrossRef]
- Wang, Z.; Yu, H.; Zhu, S.; Yang, B. Curriculum Reinforcement Learning-Based Computation Offloading Approach in Space-Air-Ground Integrated Network. In Proceedings of the 13th International Conference on Wireless Communications and Signal Processing (WCSP), Virtual, 20–21 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Tan, H.; He, M.; Xia, T.; Zheng, X.; Lai, J. A Novel Multi-level Computation Offloading Scheme at LEO Constellation Broadband Network Edge. In Proceedings of the IEEE World Congress on Services (SERVICES), Beijing, China, 18–24 October 2020; pp. 281–286. [Google Scholar] [CrossRef]
- Wang, B.; Xie, J.; Huang, D.; Xie, X. A Computation Offloading Strategy for LEO Satellite Mobile Edge Computing System. In Proceedings of the 14th International Conference on Communication Software and Networks (ICCSN), Chongqing, China, 10–12 June 2022; pp. 75–80. [Google Scholar] [CrossRef]
- Song, Z.; Hao, Y.; Liu, Y.; Sun, X. Energy-Efficient Multiaccess Edge Computing for Terrestrial-Satellite Internet of Things. IEEE Internet Things J. 2021, 8, 14202–14218. [Google Scholar] [CrossRef]
- Wei, K.; Tang, Q.; Guo, J.; Zeng, M.; Fei, Z.; Cui, Q. Resource Scheduling and Offloading Strategy Based on LEO Satellite Edge Computing. In Proceedings of the IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Virtual, 27 Spetember–28 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Tang, Q.; Fei, Z.; Li, B.; Han, Z. Computation Offloading in LEO Satellite Networks with Hybrid Cloud and Edge Computing. IEEE Internet Things J. 2021, 8, 9164–9176. [Google Scholar] [CrossRef]
- Yang, X.; Hong, B. Cost-Efficient Task Offloading for Satellite Edge Computing Systems. In Proceedings of the International Symposium on Networks, Computers and Communications (ISNCC), Shenzhen, China, 19–22 July 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Tang, Z.; Zhou, H.; Ma, T.; Yu, K.; Shen, X.S. Leveraging LEO Assisted Cloud-Edge Collaboration for Energy Efficient Computation Offloading. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Ding, Y.; Feng, Y.; Lu, W.; Zheng, S.; Zhao, N.; Meng, L.; Nallanathan, A.; Yang, X. Online Edge Learning Offloading and Resource Management for UAV-Assisted MEC Secure Communications. IEEE J. Sel. Top. Signal Process. 2023, 17, 54–65. [Google Scholar] [CrossRef]
- Lu, W.; Ding, Y.; Feng, Y.; Huang, G.; Zhao, N.; Nallanathan, A.; Yang, X. Dinkelbach-Guided Deep Reinforcement Learning for Secure Communication in UAV-Aided MEC Networks. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 1740–1745. [Google Scholar] [CrossRef]
- Chen, P.; Luo, X.; Guo, D.; Sun, Y.; Xie, J.; Zhao, Y.; Zhou, R. Secure Task Offloading for MEC-aided-UAV system. IEEE Trans. Intell. Veh. 2022, 8, 3444–3457. [Google Scholar] [CrossRef]
- Qi, X.; Yuan, M.; Zhang, Q.; Yang, Z. Joint power-trajectory-scheduling optimization in a mobile UAV-enabled network via alternating iteration. China Commun. 2022, 19, 136–152. [Google Scholar] [CrossRef]
- Mao, W.; Xiong, K.; Lu, Y.; Fan, P.; Ding, Z. Energy Consumption Minimization in Secure Multi-antenna UAV-assisted MEC Networks with Channel Uncertainty. IEEE TRansactions Wirel. Commun. 2023, 1. [Google Scholar] [CrossRef]
- Liao, Y.; Chen, X.; Xia, S.; Ai, Q.; Liu, Q. Energy Minimization for UAV Swarm-Enabled Wireless Inland Ship MEC Network with Time Windows. IEEE Trans. Green Commun. Netw. 2022, 7, 594–608. [Google Scholar] [CrossRef]
- Wang, J.; Yang, D.; Wu, F.; Xu, Y.; Xiao, L.; Zhang, T. Energy Minimization for Cellular-Connected UAV-MEC Patrol Inspection Systems. In Proceedings of the 2022 IEEE/CIC International Conference on Communications in China (ICCC), Foshan, China, 11–13 August 2022; pp. 389–394. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, Y.; Huang, X.; Fang, C.; Zhang, P. Ultra-Low Latency Multi-Task Offloading in Mobile Edge Computing. IEEE Access 2021, 9, 32569–32581. [Google Scholar] [CrossRef]
- Chai, F.; Zhang, Q.; Yao, H.; Xin, X.; Gao, R.; Guizani, M. Joint Multi-task Offloading and Resource Allocation for Mobile Edge Computing Systems in Satellite IoT. IEEE Trans. Veh. Technol. 2023, 1–15. [Google Scholar] [CrossRef]
- Ebrahim, M.A.; Ebrahim, G.A.; Mohamed, H.K.; Abdellatif, S.O. A Deep Learning Approach for Task Offloading in Multi-UAV Aided Mobile Edge Computing. IEEE Access 2022, 10, 101716–101731. [Google Scholar] [CrossRef]
- Mao, S.; He, S.; Wu, J. Joint UAV Position Optimization and Resource Scheduling in Space-Air-Ground Integrated Networks With Mixed Cloud-Edge Computing. IEEE Syst. J. 2021, 15, 3992–4002. [Google Scholar] [CrossRef]
- El Hammouti, H.; Benjillali, M.; Shihada, B.; Alouini, M.S. Learn-As-You-Fly: A Distributed Algorithm for Joint 3D Placement and User Association in Multi-UAVs Networks. IEEE Trans. Wirel. Commun. 2019, 18, 5831–5844. [Google Scholar] [CrossRef]
- Du, S.; Chen, X.; Jiao, L.; Lu, Y. Energy Efficient Task Offloading for UAV-assisted Mobile Edge Computing. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 6567–6571. [Google Scholar] [CrossRef]
- Chen, B.; Li, N.; Li, Y.; Tao, X.; Sun, G. Energy Efficient Hybrid Offloading in Space-Air-Ground Integrated Networks. In Proceedings of the 2022 IEEE Wireless Communications and Networking Conference (WCNC), Austin, TX, USA, 10–13 April 2022; pp. 1319–1324. [Google Scholar] [CrossRef]
- Chen, T.; Liu, J.; Tang, Q.; Huang, T.; Liu, Y. Deep Reinforcement Learning Based Data Offloading in Multi-Layer Ka/Q Band LEO Satellite-Terrestrial Networks. In Proceedings of the IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 1417–1422. [Google Scholar] [CrossRef]
- Zhao, J.; Hu, X.; Du, X. Algorithm of task offloading and resource allocation based on reinforcement learning in edge computing. In Proceedings of the 2021 IEEE 5th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Xi’an, China, 15–17 October 2021; Volume 5, pp. 1266–1269. [Google Scholar] [CrossRef]
- Chen, X.; Ge, H.; Liu, L.; Li, S.; Han, J.; Gong, H. Computing Offloading Decision Based on DDPG Algorithm in Mobile Edge Computing. In Proceedings of the IEEE 6th International Conference on Cloud Computing and Big Data Analytics (ICCCBDA), Chengdu, China, 24–26 April 2021; pp. 391–399. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, C.; Kumar, N.; Liu, L. Space-air-ground integrated multi-domain network resource orchestration based on virtual network architecture: A DRL method. IEEE Trans. Intell. Transp. Syst. 2021, 23, 2798–2808. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, X.; Qin, P.; Geng, S.; Meng, S. Joint Dynamic Task Offloading and Resource Scheduling for WPT Enabled Space-Air-Ground Power Internet of Things. IEEE Trans. Netw. Sci. Eng. 2022, 9, 660–677. [Google Scholar] [CrossRef]
- Wu, H.; Yang, X.; Bu, Z. Deep Reinforcement Learning for Computation Offloading and Resource Allocation in Satellite-Terrestrial Integrated Networks. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Nguyen, M.D.; Le, L.B.; Girard, A. Joint Computation Offloading, UAV Trajectory, User Scheduling, and Resource Allocation in SAGIN. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 5099–5104. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, A.; Han, C.; Liang, X. Max Completion Time Optimization for Internet of Things in LEO Satellite-Terrestrial Integrated Networks. IEEE Internet Things J. 2021, 8, 9981–9994. [Google Scholar] [CrossRef]
- Cao, H.; Yu, G.; Chen, Z. Cooperative Task offloading and Dispatching Optimization for Large-scale Users via UAVs and HAP. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, H.; Wang, J.; Chang, Q.; Wang, J.; Pal, N.R. Learning optimized structure of neural networks by hidden node pruning with L_{1} regularization. IEEE Trans. Cybern. 2019, 50, 1333–1346. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wang, J.; Sun, Z.; Zurada, J.M.; Pal, N.R. Feature selection for neural networks using group lasso regularization. IEEE Trans. Knowl. Data Eng. 2019, 32, 659–673. [Google Scholar] [CrossRef]
- Wang, B.; Li, X.; Huang, D.; Xie, J. A Profit Maximization Strategy of MEC Resource Provider in the Satellite-Terrestrial Double Edge Computing System. In Proceedings of the 2021 IEEE 21st International Conference on Communication Technology (ICCT), Tianjin, China, 13–16 October 2021; pp. 906–912. [Google Scholar] [CrossRef]
- Fujimoto, S.; van Hoof, H.; Meger, D. Addressing Function Approximation Error in Actor-Critic Methods. In Proceedings of the 35th International Conference on Machine Learning; Dy, J., Krause, A., Eds.; PMLR: Cambridge, MA, USA, 2018; Volume 80, pp. 1587–1596. [Google Scholar]
- Gong, H.; Ge, H.; Ma, S.; Sun, A.; Chen, X.; Liu, L. Task Offloading Strategy Based on TD3 Algorithm in Cloud-Edge Collaborative MEC. In Proceedings of the 2022 4th International Conference on Natural Language Processing (ICNLP), Abu Dhabi, UAE, 7–11 December 2022; pp. 452–459. [Google Scholar] [CrossRef]
- Hazarika, B.; Singh, K.; Biswas, S.; Li, C.P. DRL-Based Resource Allocation for Computation Offloading in IoV Networks. IEEE Trans. Ind. Informatics 2022, 18, 8027–8038. [Google Scholar] [CrossRef]
- Chen, N.; Zhang, S.; Qian, Z.; Wu, J.; Lu, S. When Learning Joins Edge: Real-Time Proportional Computation Offloading via Deep Reinforcement Learning. In Proceedings of the IEEE 25th International Conference on Parallel and Distributed Systems (ICPADS), Tianjin, China, 4–6 December 2019; pp. 414–421. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Computing resources of LEO satellite, | GHz |
| CPU cycles for processing one bit, | 100 cycles/bit |
| Effective switched capacitance, k | |
| IoT maximum transmit power, | 23 dBm |
| UAV maximum transmit power, | 40 dBm |
| Coverage radius of UAV, | 1 km |
| Height of LEO satellite, | km |
| Number of bandwidth chunks, K | 6 |
| Noise spectral density, | dBm/Hz |
| Bandwidth of UAVs, | 1 MHz |
| Bandwidth of LEO, B | 10 MHz |
| UAV altitude, | 100 m |
| Light speed, c | m/s |
| Task size, | MB |
| Parameter | Value |
|---|---|
| Buffer capacity, M | 1,000,000 |
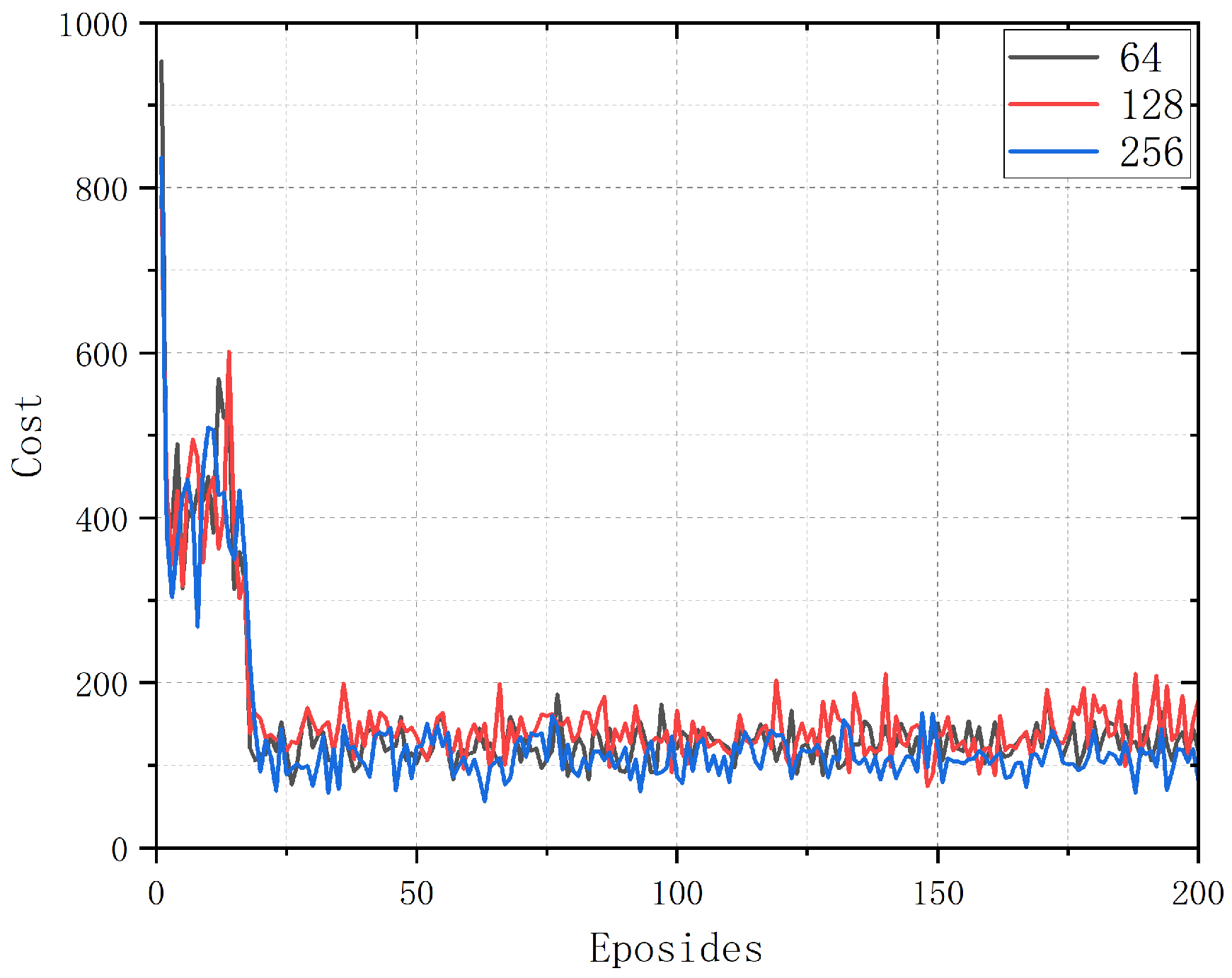
| Batch size, B | 256 |
| Learning rate, | 0.0001, 0.001 |
| Soft update rate, | 0.005 |
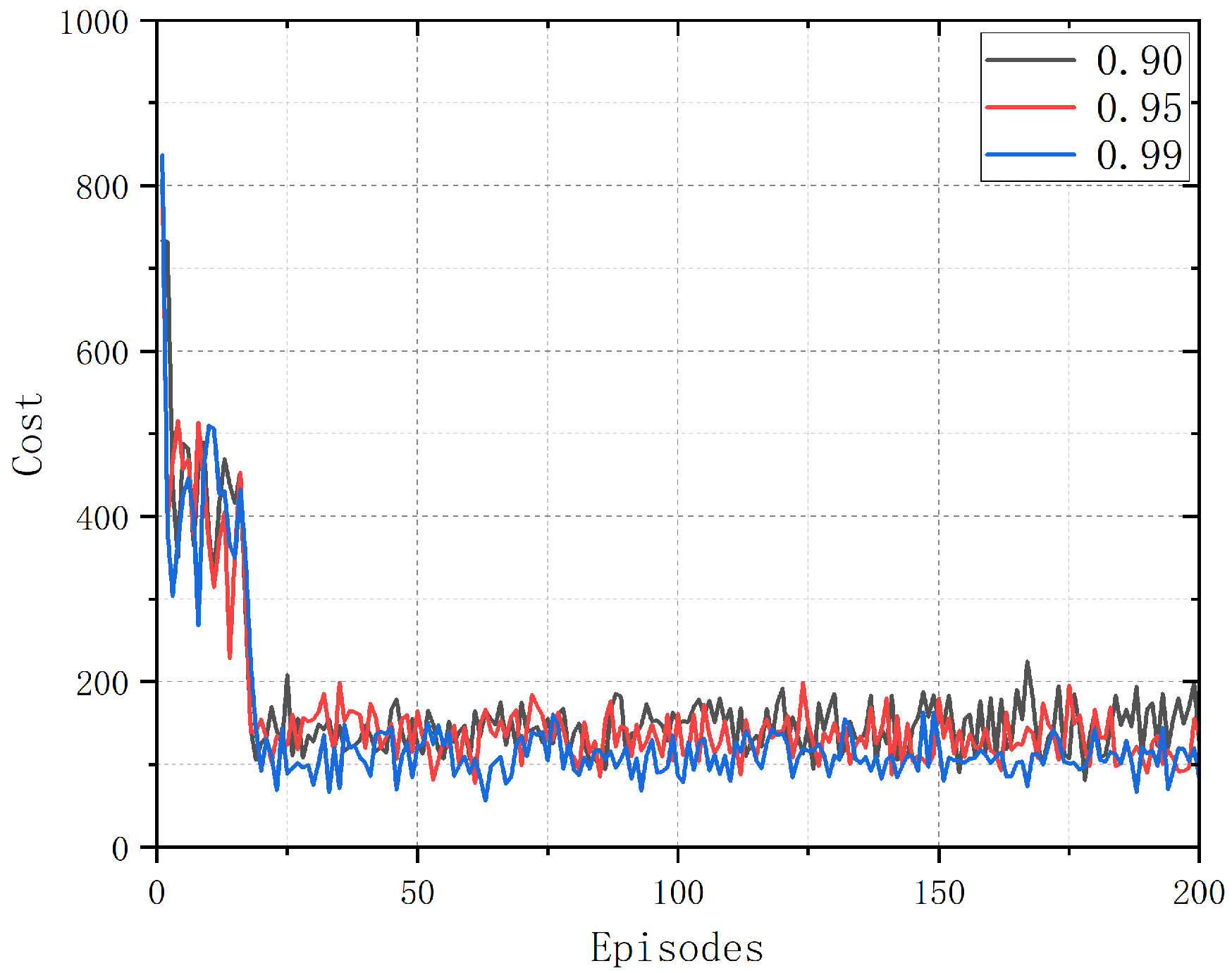
| Discount factor, | 0.99 |
| Exploration rate, | 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Xi, S.; Jiang, H.; Shen, Q.; Shang, B.; Wang, J. Resource Allocation and Offloading Strategy for UAV-Assisted LEO Satellite Edge Computing. Drones 2023, 7, 383. https://doi.org/10.3390/drones7060383
Zhang H, Xi S, Jiang H, Shen Q, Shang B, Wang J. Resource Allocation and Offloading Strategy for UAV-Assisted LEO Satellite Edge Computing. Drones. 2023; 7(6):383. https://doi.org/10.3390/drones7060383
Chicago/Turabian StyleZhang, Hongxia, Shiyu Xi, Hongzhao Jiang, Qi Shen, Bodong Shang, and Jian Wang. 2023. "Resource Allocation and Offloading Strategy for UAV-Assisted LEO Satellite Edge Computing" Drones 7, no. 6: 383. https://doi.org/10.3390/drones7060383
APA StyleZhang, H., Xi, S., Jiang, H., Shen, Q., Shang, B., & Wang, J. (2023). Resource Allocation and Offloading Strategy for UAV-Assisted LEO Satellite Edge Computing. Drones, 7(6), 383. https://doi.org/10.3390/drones7060383