
An Enhanced Energy-Efficient Data Collection Optimization Algorithm for UAV Swarm in the Intelligent Internet of Things

 ,
, 
 ,
, 
Abstract
1. Introduction
2. Related Works
2.1. UAV Path Planning Algorithm
2.2. UAV Data Collection Algorithms
3. Materials and Methods
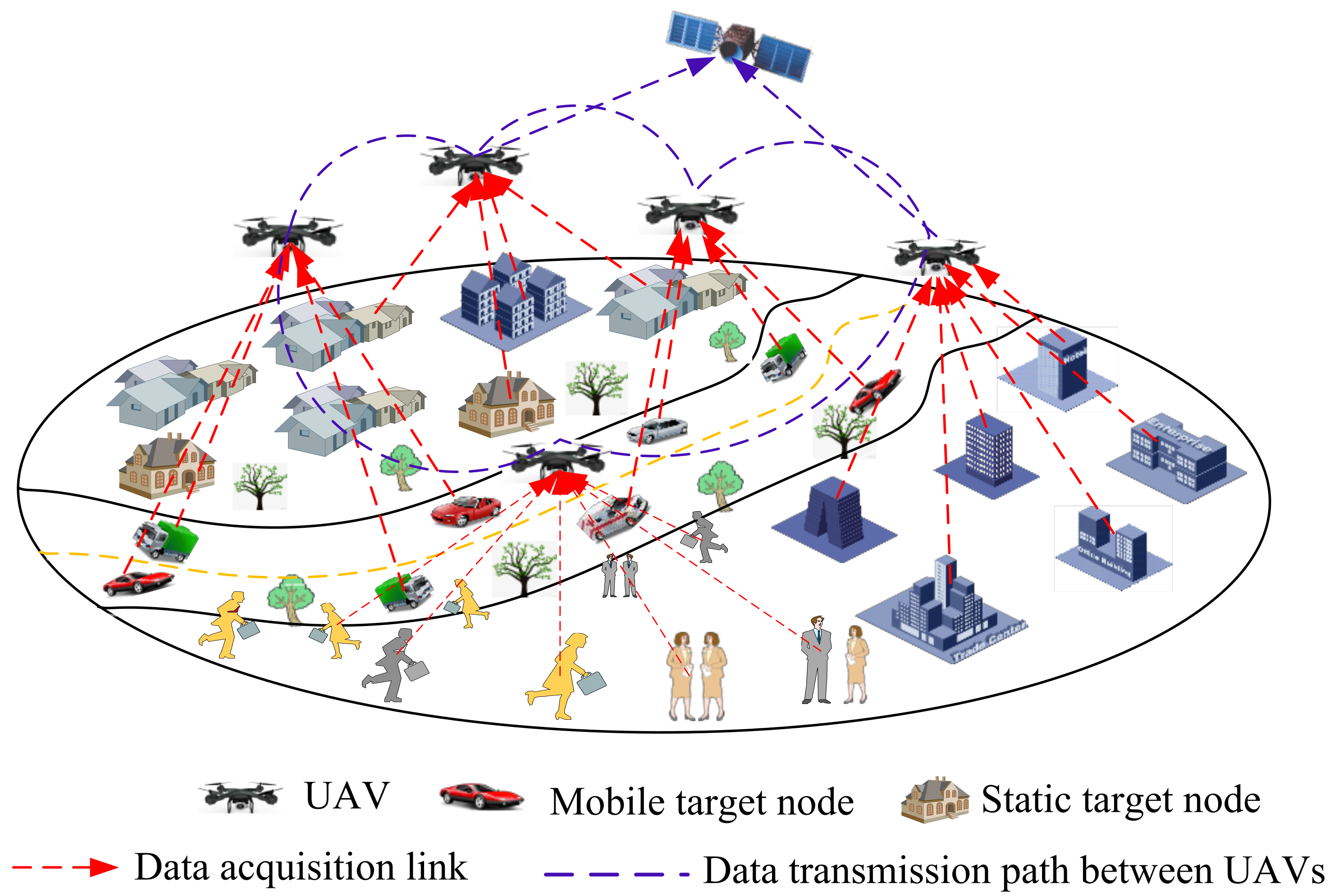
3.1. Network Model
3.2. Data Collection of EDC-UAVIIoT
3.3. Energy Balance of EDC-UAVIIoT
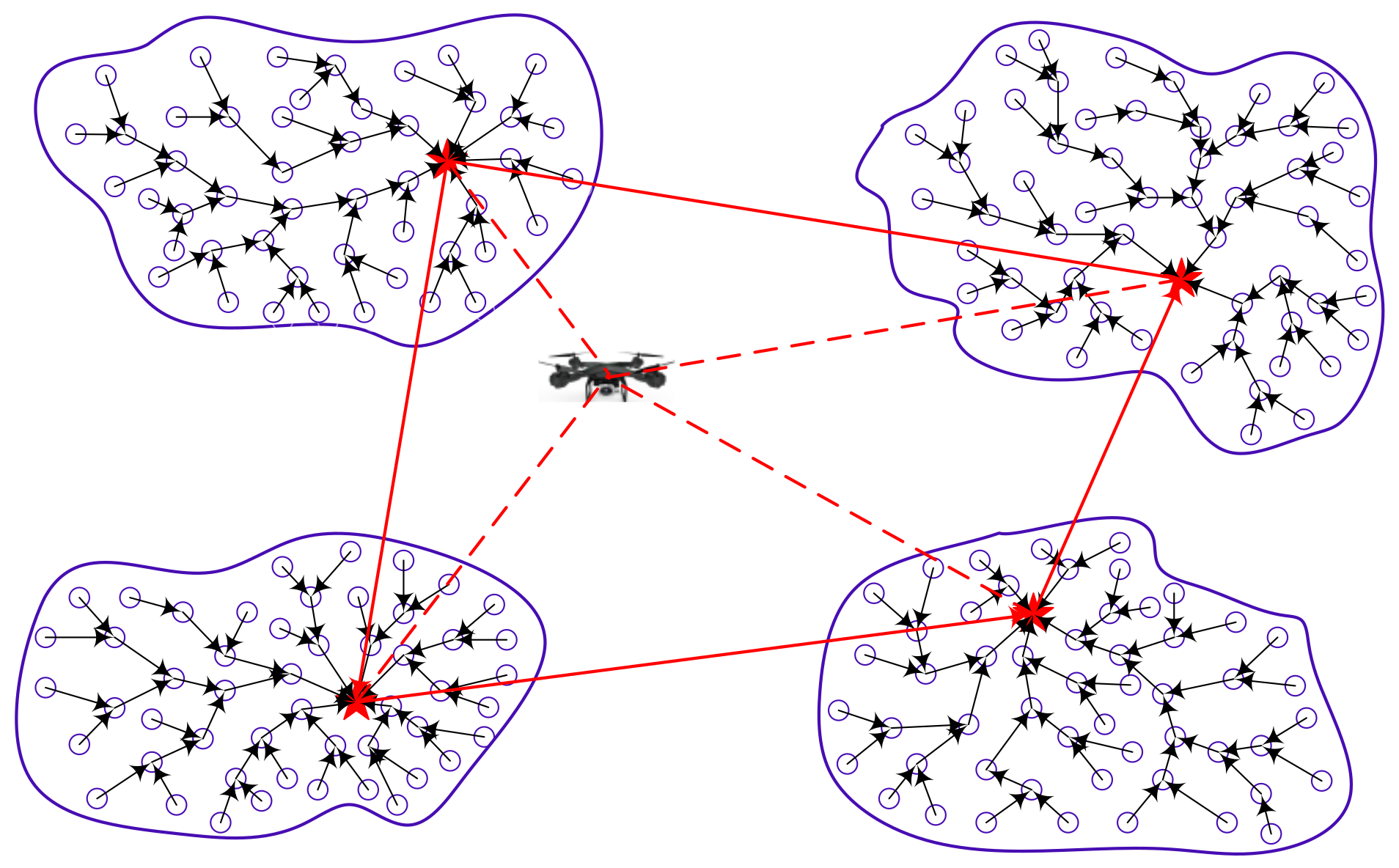
- Discussion 1. When the UAV flight path is a round-trip loop, the increase of the communication radius of the sensing node will lead to the enlargement of the coverage area of the sensing node and extend outward to the coverage area. If the wireless communication radii of several sensing nodes in close spatial position are partially overlapped, then the UAV can complete data collection for all sensing nodes as long as it enters the overlapping area. Obviously, the coincidence of the communication radius of the sensing nodes enables the UAV to access more sensing nodes without changing the energy constraint of Formula (32), and because the communication radius of the sensing nodes increases, the number of intersection points of any two nodes increases, thus forming a path scheme dominated by edge paths. Therefore, the length of the distance flown by the UAV becomes smaller.
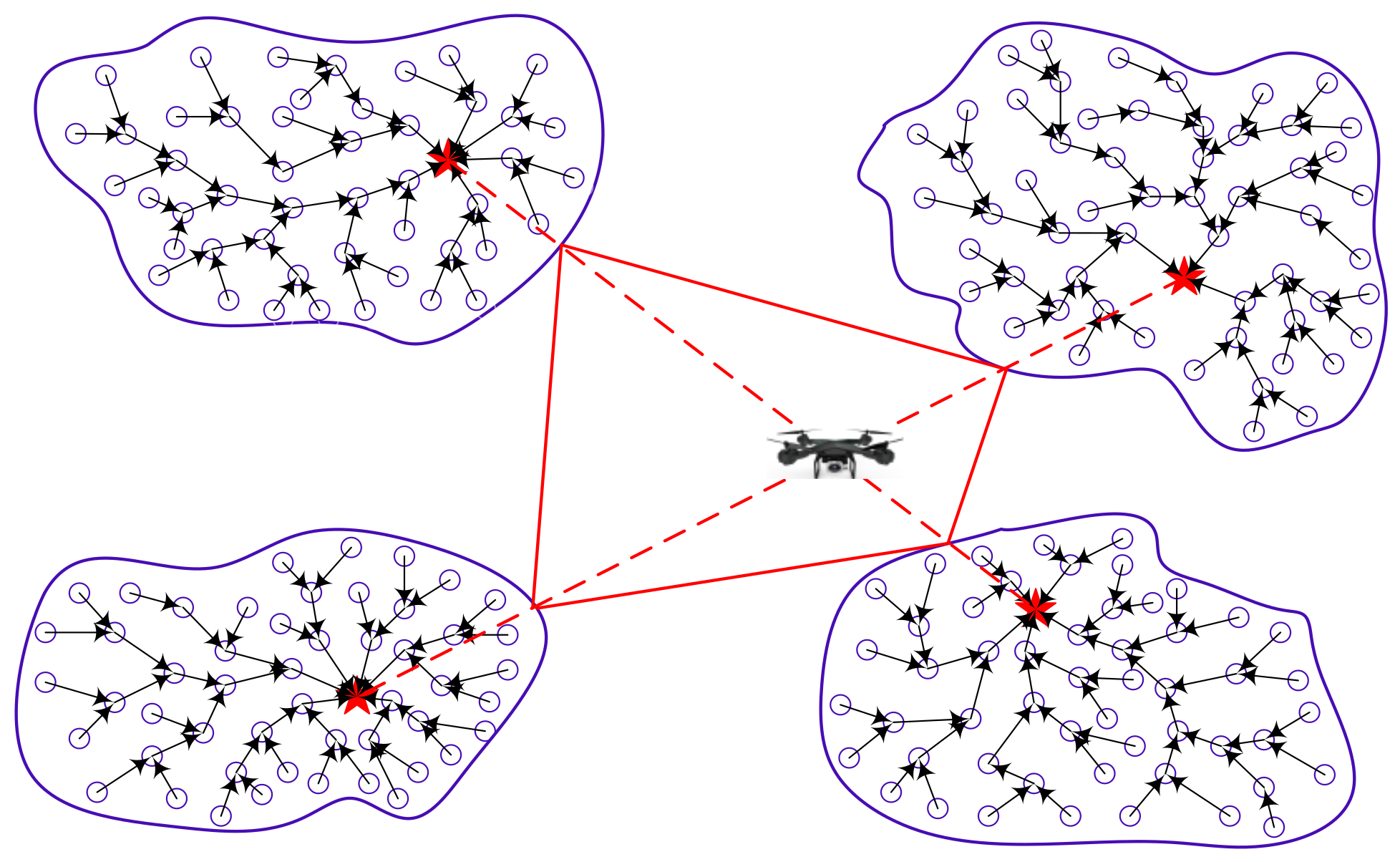
- Discussion 2. If the line is the boundary of a closed polygon, when the communication radius of the sensing node increases, the residence point of the UAV is determined by the intersection of the perpendicular lines of the edges of any two diagonal cluster heads. According to the shortest line segment between two points, the distance between this resident point and any cluster head node is the shortest. At this time, the distance length flown by the UAV will become smaller. Figure 2 shows the path planning before optimization. Figure 3 shows the optimized path planning diagram.
3.4. EDC-UAVIIoT Algorithm
| Algorithm 1: EDC-UAVIIoT algorithm |
| Input: Ptr, Rc, Eelec, N, λ, φ, ρ, δ |
| Output: Qmin |
| While (i != Null) |
| { |
| link[i].node = calculate.RC_max |
| long[i].node = calculate.node[i] |
| Data_average = Datasuc_rate[i].node |
| Xi = Calculate.Ai |
| i = i + 1 |
| if (p→1) |
| long[i].node = optimal.node[i] |
| else |
| break |
| nodes[i].ms = node[i].Qmin |
| } |
| Calculate the value of Qopt |
| if (Qopt < Qmin) |
| Qmin = Qopt |
| Output Qmin |
| else |
| Output Qmin |
4. Results
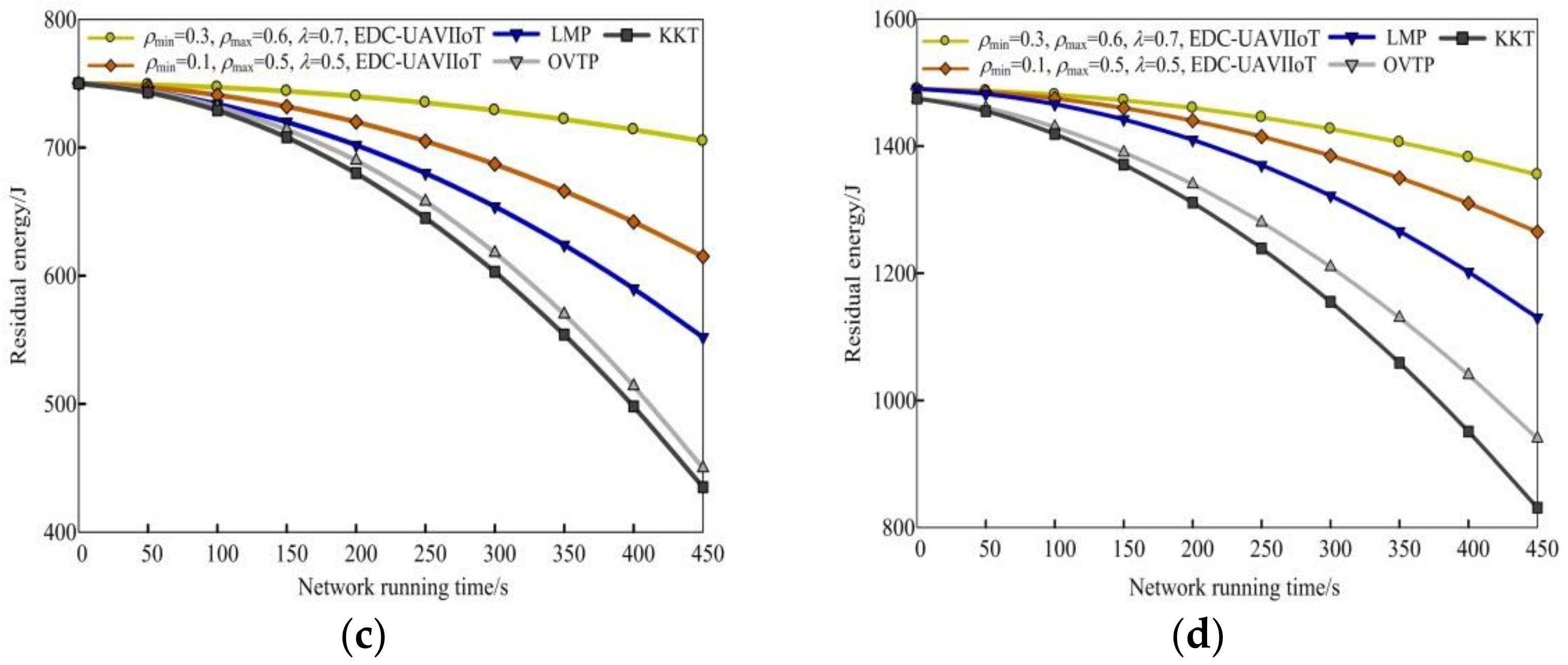
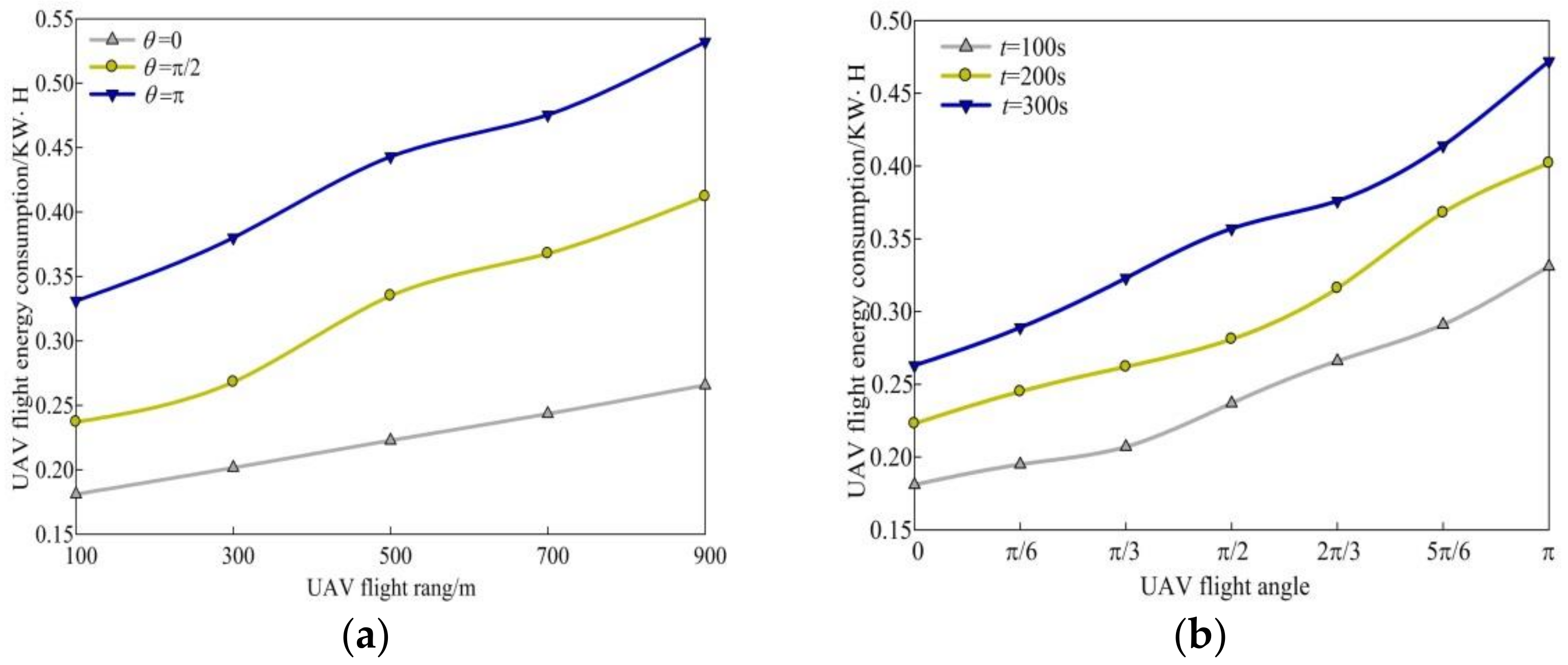
4.1. Network Energy Consumption
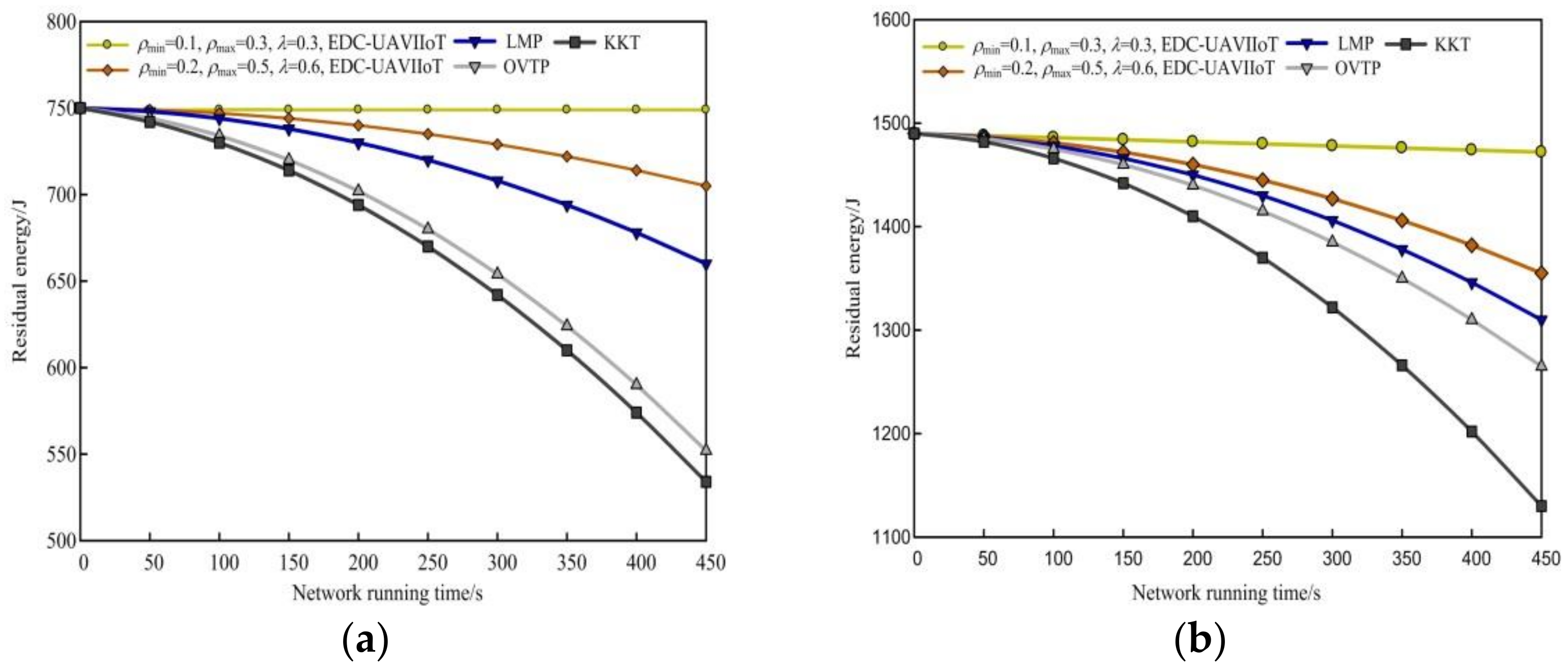
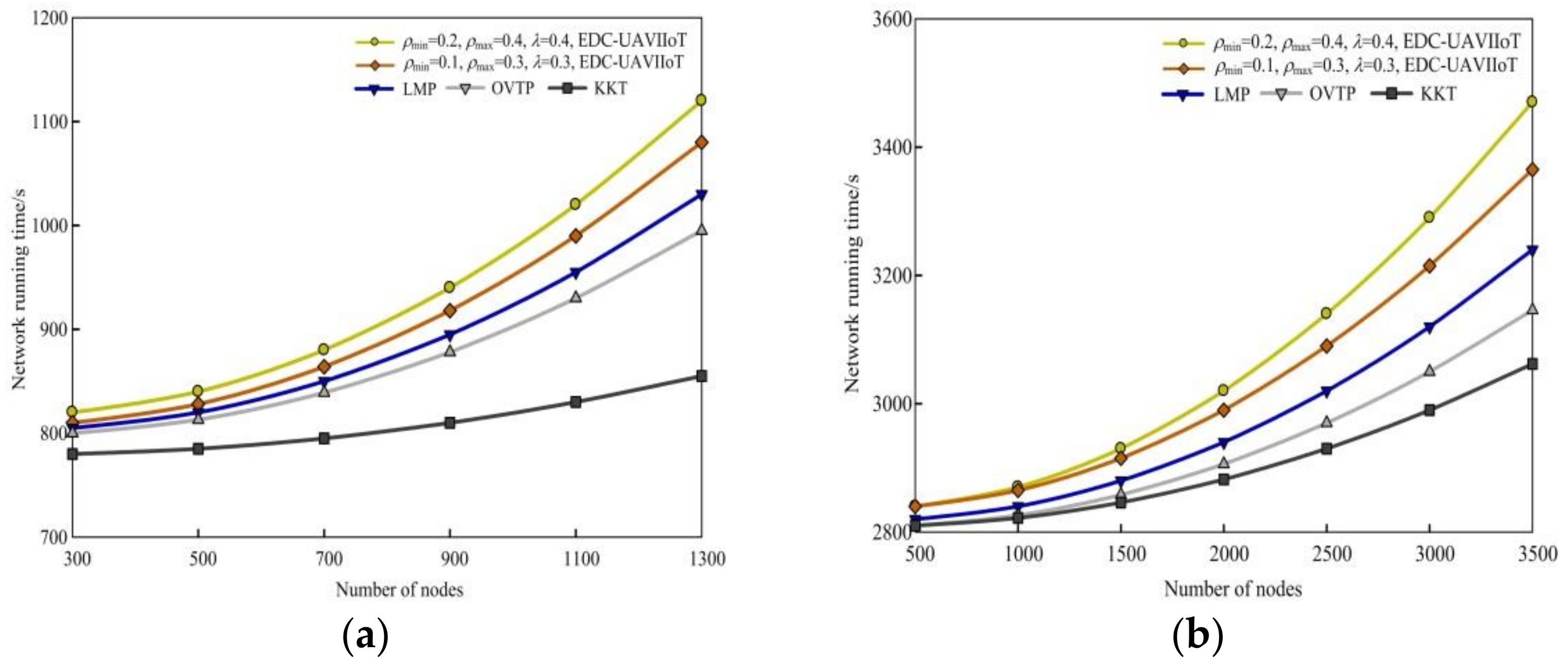
4.2. Network Running Time
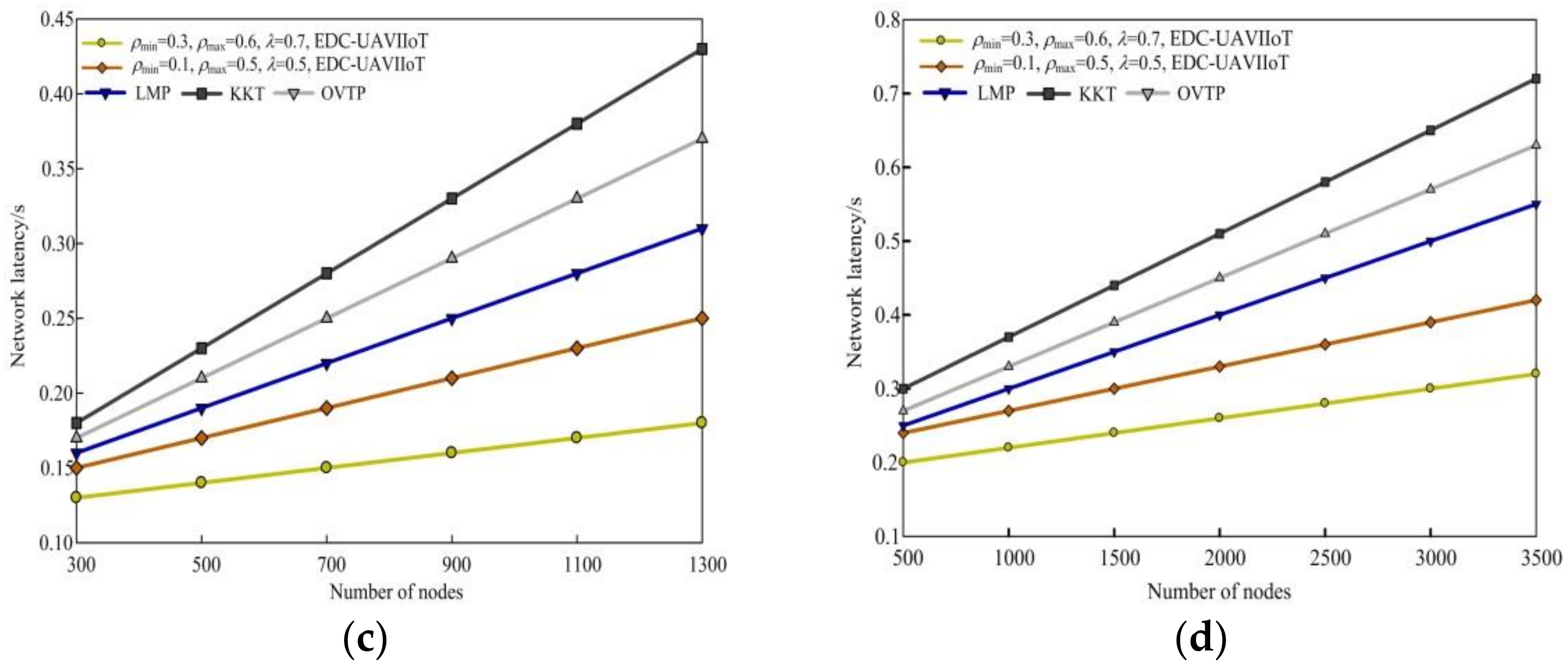
4.3. Network Latency
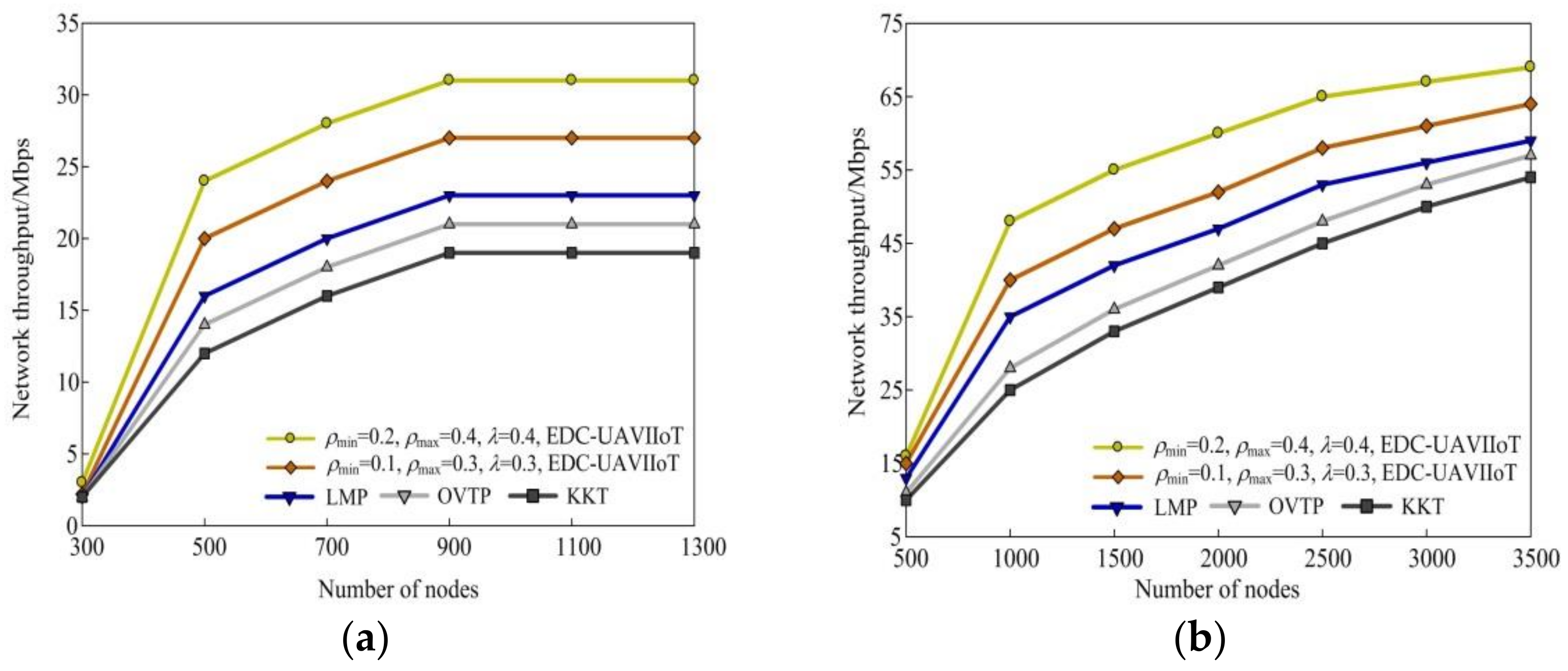
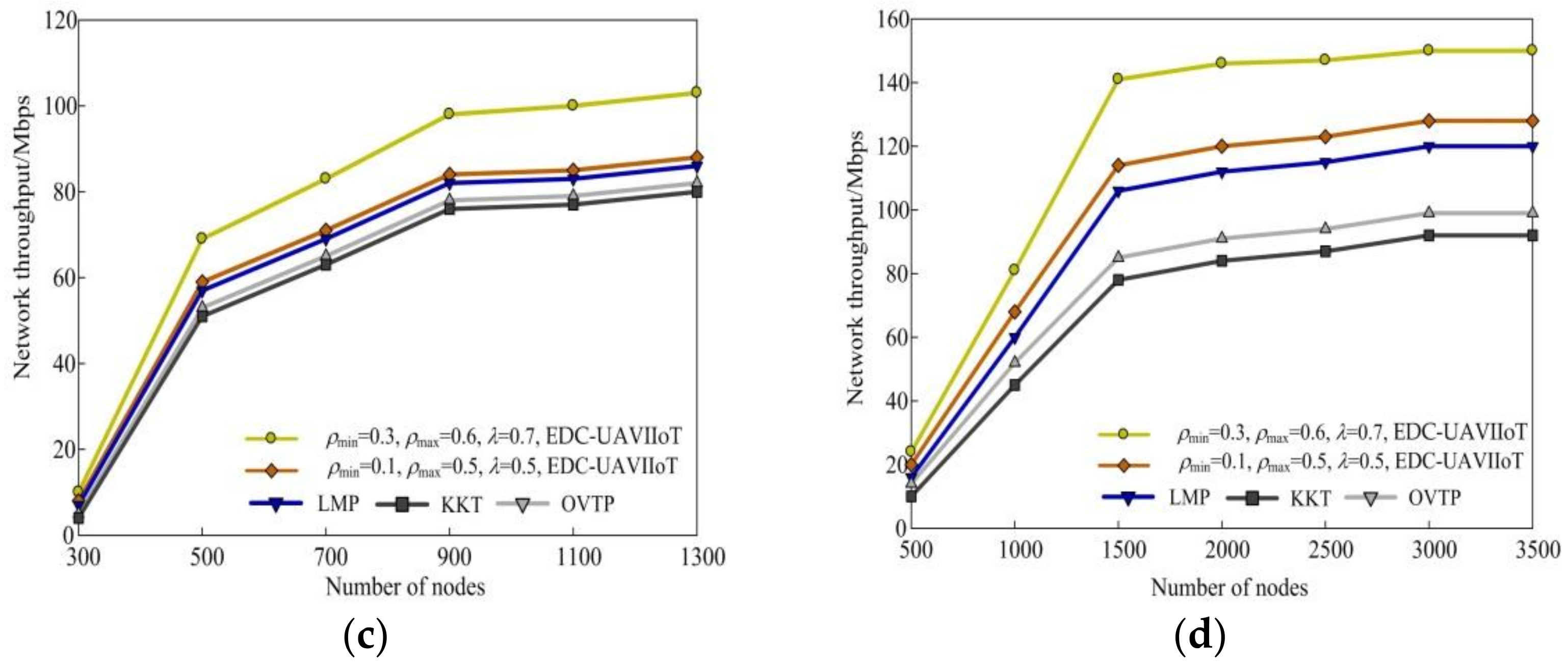
4.4. Network Throughput
4.5. Scene Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, W.; Sun, Y.; Zou, R.; Liang, W.; Xia, Q.; Shan, F.; Wang, T.; Jia, X.; Li, Z. Throughput Maximization of UAV Networks. IEEE/ACM Trans. Netw. 2022, 30, 881–895. [Google Scholar] [CrossRef]
- Ouyang, W.; Obaidat, M.; Liu, X.; Long, X.; Xu, W.; Liu, T. Importance-different Charging Scheduling based on Matroid Theory for Wireless Rechargeable Sensor Networks. IEEE Trans. Wirel. Commun. 2021, 20, 3284–3294. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, Y.; Fei, Z.; Wang, X.; Miao, Z. NOMA-aided UAV Data Collection Systems: Trajectory Optimization and Communication Design. IEEE Access 2020, 8, 155843–155858. [Google Scholar] [CrossRef]
- Ouamri, M.A.; Alkanhel, R.; Singh, D.; El-kenaway, E.M.; Ghoneim, S.S.M. Double deep q-network method for energy efficiency and throughput in a uav-assisted terrestrial network. Comput. Syst. Sci. Eng. 2023, 46, 73–92. [Google Scholar] [CrossRef]
- Jakaria, A.; Rahman, M.; Asif, M.; Khalil, A.; Kholidy, H.; Anderson, M.; Drager, S. Trajectory Synthesis for a UAV Swarm based on Resilient Data Collection Objectives. IEEE Trans. Netw. Serv. Manag. 2023, 20, 138–151. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, G.; Cui, M.; You, C.; Wu, Q.; Ma, S.; Chen, W. Task Completion Time Minimization for UAV-enabled Data Collection in Rician Fading Channels. IEEE Internet Things J. 2023, 10, 1134–1148. [Google Scholar] [CrossRef]
- Zhao, Y.; Yan, L.; Dai, J.; Hu, X.; Wei, P.; Xie, H. Robust Planning System for Fast Autonomous Flight in Complex Unknown Environment Using Sparse Directed Frontier Points. Drones 2023, 7, 219. [Google Scholar] [CrossRef]
- Zhou, X.; Yan, S.; Shu, F.; Chen, R.; Li, J. UAV-enabled Covert Wireless Data Collection. IEEE J. Sel. Areas Commun. 2021, 39, 3348–3362. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Cheng, C.; Deng, L.; Chen, X.; Xiao, F. A Joint User Scheduling and Trajectory Planning Data Collection Strategy for the UAV-assisted WSN. IEEE Commun. Lett. 2021, 25, 2333–2337. [Google Scholar] [CrossRef]
- Chen, J.; Tang, J. UAV-Assisted Data Collection for Dynamic and Heterogeneous Wireless Sensor Networks. IEEE Wirel. Commun. Lett. 2022, 11, 1288–1292. [Google Scholar] [CrossRef]
- Li, M.; He, S.; Li, H. Minimizing Mission Completion Time of UAVs by Jointly Optimizing the Flight and Data Collection Trajectory in UAV-enabled WSNs. IEEE Internet Things J. 2022, 9, 13498–13510. [Google Scholar] [CrossRef]
- Xu, W.; Liang, W.; Xu, Z.; Peng, J.; Peng, D.; Liu, T.; Jia, X.; Das, S. Approximation Algorithm for the Generalized Team Orienteering Problem and its Applications. IEEE/ACM Trans. Netw. 2021, 29, 176–189. [Google Scholar] [CrossRef]
- Haider, S.; Zikria, Y.; Garg, S.; Ahmad, S.; Hassan, M.; Alqahtani, S. AI-based Energy-efficient UAV-assisted IoT Data Collection with Integrated Trajectory and Resource Optimization. IEEE Wirel. Commun. 2022, 29, 30–36. [Google Scholar] [CrossRef]
- Sinha, P.; Guvenc, I. Impact of Antenna Pattern on TOA based 3D UAV Localization Using a Terrestrial Sensor Network. IEEE Trans. Veh. Technol. 2022, 71, 7703–7718. [Google Scholar] [CrossRef]
- Yang, B.; Taleb, T.; Chen, G.; Shen, S. Covert Communication for Cellular and X2U-enabled UAV Networks with Active and Passive Wardens. IEEE Netw. 2022, 36, 166–173. [Google Scholar] [CrossRef]
- Shao, X.; Zhao, S.; Chen, G.; Shen, S.; Yang, B. Spectrum Allocation for Sum Rate Maximization in UAV-to-UAV Communication Underlaid Cellular Networks. J. Inf. Sci. Eng. 2021, 37, 917–933. [Google Scholar]
- Liang, Y.; Xu, W.; Liang, W.; Peng, J.; Jia, X.; Zhou, Y.; Duan, L. Nonredundant Information Collection in Rescue Applications via an Energy-constrained UAV. IEEE Internet Things J. 2019, 6, 2945–2958. [Google Scholar] [CrossRef]
- Mao, S.; Zhang, N.; Liu, L.; Wu, J.; Dong, M.; Ota, K.; Liu, T.; Wu, D. Computation Rate Maximization for Intelligent Reflecting Surface Enhanced Wireless Powered Mobile Edge Computing Networks. IEEE Trans. Veh. Technol. 2021, 70, 10820–10831. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J.; Ding, Z. Energy-constrained UAV Data Collection Systems: NOMA and OMA. IEEE Trans. Veh. Technol. 2021, 70, 6898–6912. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, W.; Liu, C. Completion Time Minimization for UAV-UGV-enabled Data Collection. Sensor 2022, 22, 5839. [Google Scholar] [CrossRef]
- Han, S.; Zhu, K.; Zhou, M.; Liu, X. Joint Deployment Optimization and Flight Trajectory Planning for UAV Assisted IoT Data Collection: A Bilevel Optimization Approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21492–21504. [Google Scholar] [CrossRef]
- Xiang, Z.; Liu, T.; Peng, J. Weighted Data Loss Minimization in UAV Enabled Wireless Sensor Networks. In Proceedings of the 17th International Conference on Wireless Algorithms, Systems, and Applications, WASA, Dalian, China, 24–26 November 2022; IEEE: New York, NY, USA, 2022; pp. 117–129. [Google Scholar]
- Liu, X.; Lin, P.; Liu, T.; Wang, T.; Liu, A.; Xu, W. Objective-variable Tour Planning for Mobile Data Collection in Partitioned Senson Networks. IEEE Trans. Mob. Comput. 2022, 21, 239–251. [Google Scholar]
- Li, Y.; Liang, W.; Xu, W.; Xu, Z.; Jia, X.; Xu, Y.; Kan, H. Data Collection Maximization in IoT-sensor Networks via an Energy- constrained UAV. IEEE Trans. Mob. Comput. 2023, 22, 159–174. [Google Scholar] [CrossRef]
- Guo, Q.; Peng, J.; Xu, W.; Liang, W.; Jia, X.; Xu, Z.; Yang, Y.; Wang, M. Minimizing the Longest Tour Time among a Fleet of UAVs for Disaster Area Surveillance. IEEE Trans. Mob. Comput. 2022, 21, 2451–2465. [Google Scholar] [CrossRef]
- Deng, L.; Xu, W.; Liang, W.; Peng, J.; Zhou, Y.; Duan, L.; Das, S. Approximation Algorithm for the Min-max Cycle Cover Problem with Neighborhoods. IEEE/ACM Trans. Netw. 2020, 28, 1845–1858. [Google Scholar] [CrossRef]
- Yang, B.; Dang, Y.; Taled, T.; Shen, S.; Jiang, X. Sum Rate and Max-min Rate for Cellular-enabled UAV Swarm Networks. IEEE Trans. Veh. Technol. 2023, 72, 1073–1083. [Google Scholar] [CrossRef]
- Tang, R.; Zhang, R.; Xu, Y.; He, J. Energy-efficient Optimization Algorithm in NOMA-based UAV-assisted Data Collection Systems. IEEE Wirel. Commun. Lett. 2023, 12, 158–162. [Google Scholar] [CrossRef]
- Wu, B.; Guo, D.; Zhang, B.; Zhang, X.; Wang, H.; Wang, H.; Jiang, H. Completion Time Minimization for UAV Enabled Data Collection with Communication Link Constrained. IET Commun. 2022, 16, 1025–1040. [Google Scholar] [CrossRef]
- Dang, Y.; Benzaid, C.; Yang, B.; Taleb, T.; Shen, Y. Deep-ensemble-learning-based GPS Spoofing Detection for Cellular- connected UAV. IEEE Internet Things J. 2022, 9, 25068–25085. [Google Scholar] [CrossRef]
- Xu, W.; Xiao, T.; Zhang, J.; Liang, W.; Xu, Z.; Liu, X.; Jia, X.; Das, S. Minimizing the Deployment Cost of UAVs for Delay- sensitive Data Collection in IoT Network. IEEE/ACM Trans. Netw. 2022, 30, 812–825. [Google Scholar] [CrossRef]
- Tang, X.; Wang, W.; He, H.; Zhang, R. Energy-efficient Data Collection for UAV-assisted IoT: Joint Trajectory and Resource Optimization. Chin. J. Aeronaut. 2022, 35, 95–105. [Google Scholar] [CrossRef]
- Ma, T.; Zhou, H.; Qian, B.; Cheng, N.; Shen, X.; Chen, X.; Bai, B. UAV-LEO Integrated Backbone: A Ubiquitous Data Collection Approach for B5G Internet of Remote Things Networks. IEEE J. Sel. Areas Commun. 2021, 39, 3491–3505. [Google Scholar] [CrossRef]
- Jiang, C.; Li, T.; Liang, J.; Wu, H. Low-latency and Energy-efficient Data Preservation Mechanism in Low-duty-cycle Sensor Networks. Sensors 2017, 17, 1051. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, G.; Wang, Q.; Wang, K.; Yang, K. Completion Time Minimization in Wireless-powered UAV-assisted Data Collection Systems. IEEE Commun. Lett. 2021, 25, 1954–1958. [Google Scholar] [CrossRef]
- Zhou, M.; Chen, H.; Shu, L.; Liu, Y. UAV-Assisted Sleep Scheduling Algorithm for Energy-efficient Data Collection in Agricultural Internet of Things. IEEE Internet Things J. 2022, 9, 11043–11056. [Google Scholar] [CrossRef]
- Wei, Z.; Zhu, M.; Zhang, N.; Wang, L.; Zou, Y.; Meng, Z.; Wu, H.; Feng, Z. UAV-assisted Data Collection for Internet of Things: A Survey. IEEE Internet Things J. 2022, 9, 15460–15483. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Related Description |
|---|---|
| Ptr | The power transmitted by the UAV in time slot t |
| Dds | Numbers of single machine in time slot t |
| Dnds | Numbers of UAV clusters in time slot t |
| si and sj | ith node and jth node |
| Rc | Node sensing radius |
| k | The number of bits of transmitted information |
| Eelec | The energy lost by the transmitting circuit to send or receive each bit of data |
| εfs and εmp | Parameters of transmission amplifier model parameters |
| N | The number of nodes |
| δ | The probability of packet loss |
| λ, χ | Controllable parameter and energy factor |
| p, q | Data transition probability and approximate probability |
| Pij | The radio signal transmission power between the transmitting node si and the receiving node sj |
| Pijγij | The signal-to-noise ratio from the transmitting side si to the receiving side sj |
| ρ, ωij | Variable parameters in the range [0, 1] and constant |
| φ, Hij | Link loss index and multipath reflection loss |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Xu, C.; Wang, G.; Lan, L.; Shi, M.; Xing, X.; Liao, G. An Enhanced Energy-Efficient Data Collection Optimization Algorithm for UAV Swarm in the Intelligent Internet of Things. Drones 2023, 7, 373. https://doi.org/10.3390/drones7060373
Sun Z, Xu C, Wang G, Lan L, Shi M, Xing X, Liao G. An Enhanced Energy-Efficient Data Collection Optimization Algorithm for UAV Swarm in the Intelligent Internet of Things. Drones. 2023; 7(6):373. https://doi.org/10.3390/drones7060373
Chicago/Turabian StyleSun, Zeyu, Chen Xu, Guoyong Wang, Lan Lan, Mingxing Shi, Xiaofei Xing, and Guisheng Liao. 2023. "An Enhanced Energy-Efficient Data Collection Optimization Algorithm for UAV Swarm in the Intelligent Internet of Things" Drones 7, no. 6: 373. https://doi.org/10.3390/drones7060373
APA StyleSun, Z., Xu, C., Wang, G., Lan, L., Shi, M., Xing, X., & Liao, G. (2023). An Enhanced Energy-Efficient Data Collection Optimization Algorithm for UAV Swarm in the Intelligent Internet of Things. Drones, 7(6), 373. https://doi.org/10.3390/drones7060373