



Research on the Cooperative Passive Location of Moving Targets Based on Improved Particle Swarm Optimization


Abstract
1. Introduction
- The real-time trajectory planning for the passive location of the UAV cluster is implemented based on the RSS model.
- Using the improved deep learning network to correct the target location probability parameters in the positioning algorithm, a more accurate positioning of the moving target is achieved.
- The depth network can identify the target movement trend in complex mixed noise, which provides a method to solve the problem of recognition in complex noise.
- Designing particle grouping and time period to improve the particle swarm optimization algorithm, the algorithm effect is improved.
2. Location Model and Optimization Criteria
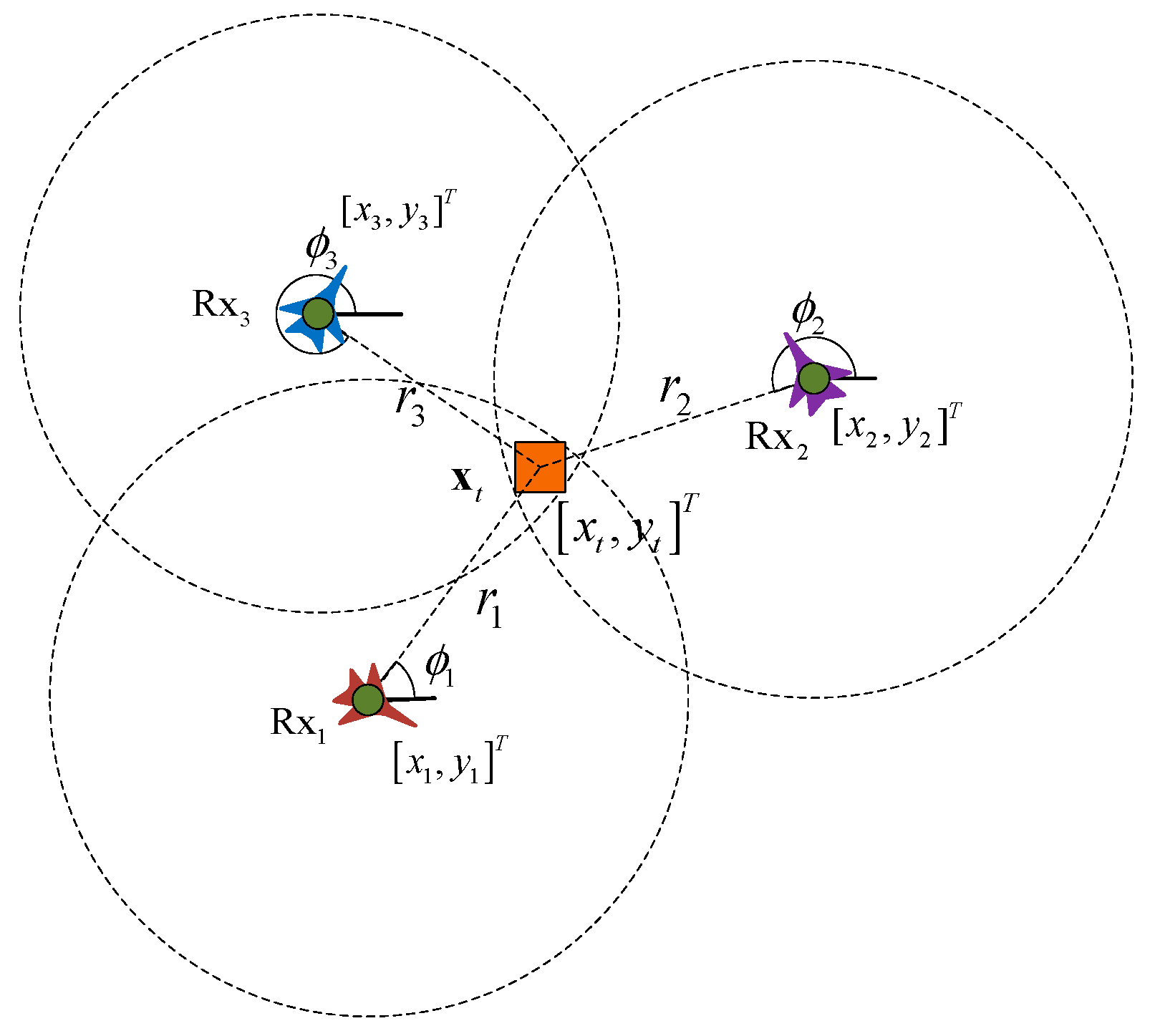
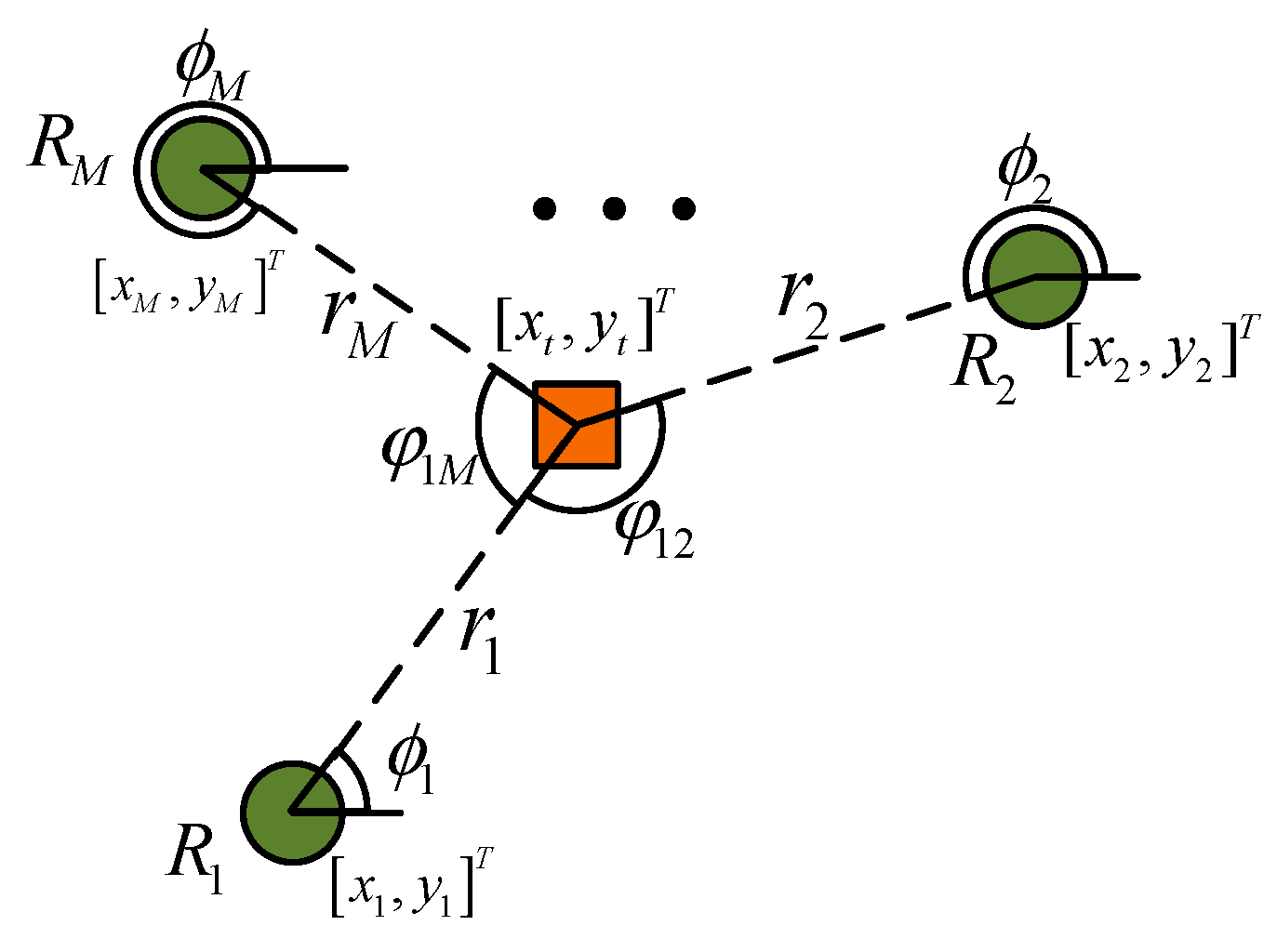
2.1. Principles of RSS
2.2. Measurement Model
2.3. A Optimization Criterion
3. Configuration Optimization Method for the Passive Location of Moving Target
3.1. Passive Location Methods for Static Objects
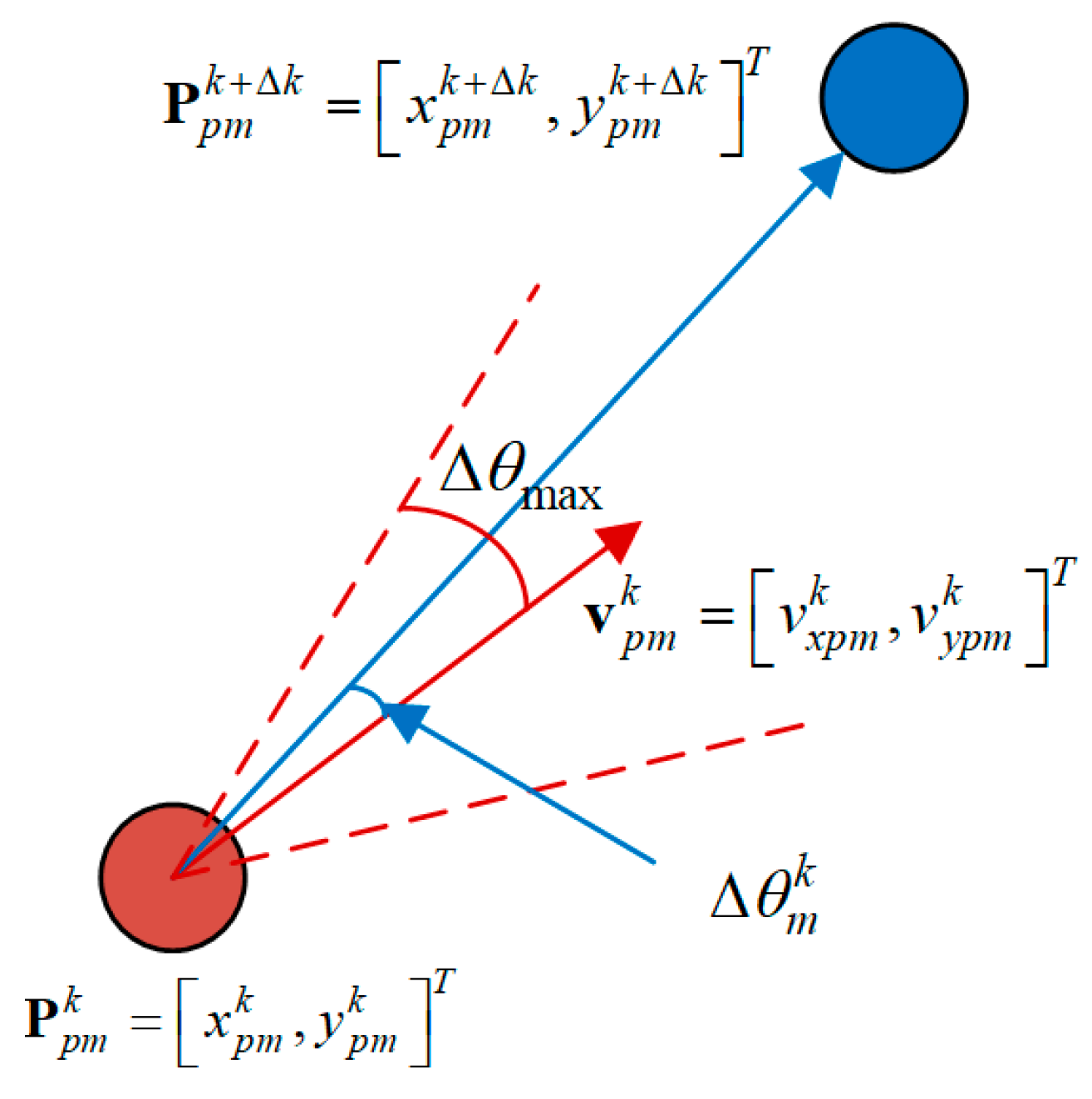
3.2. The Main Difference between the Location of Moving Objects and Stationary Objects
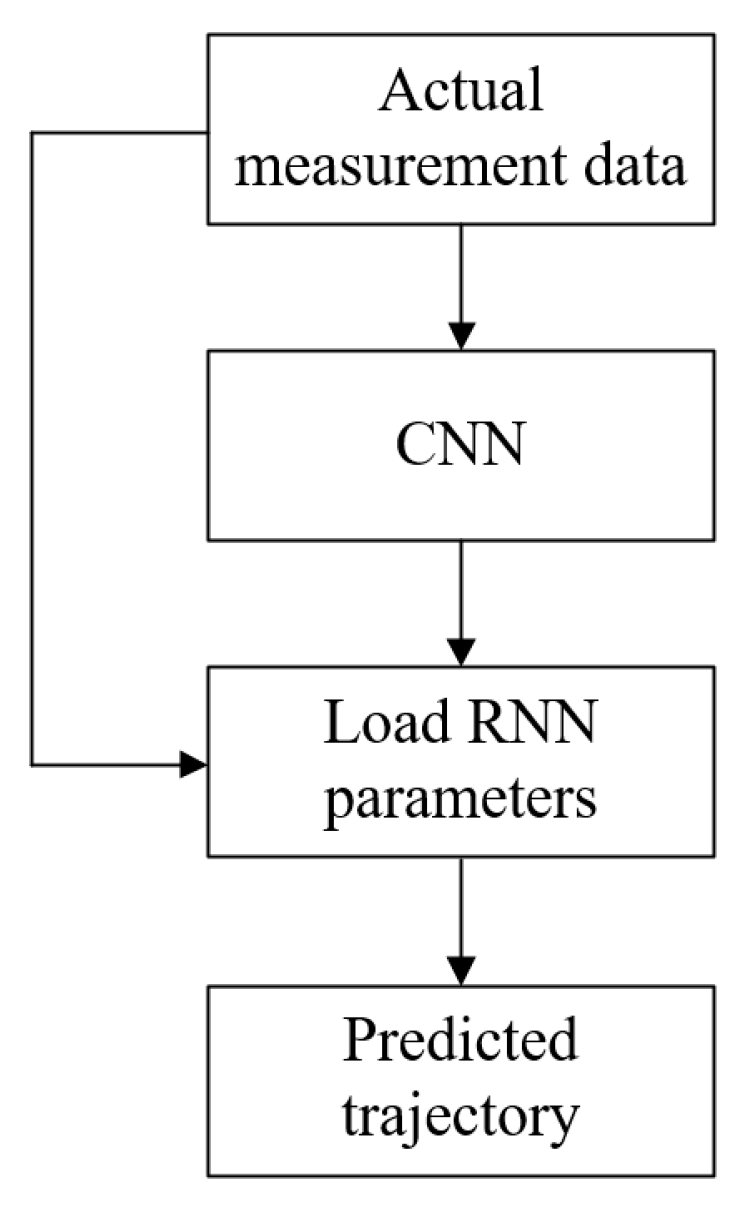
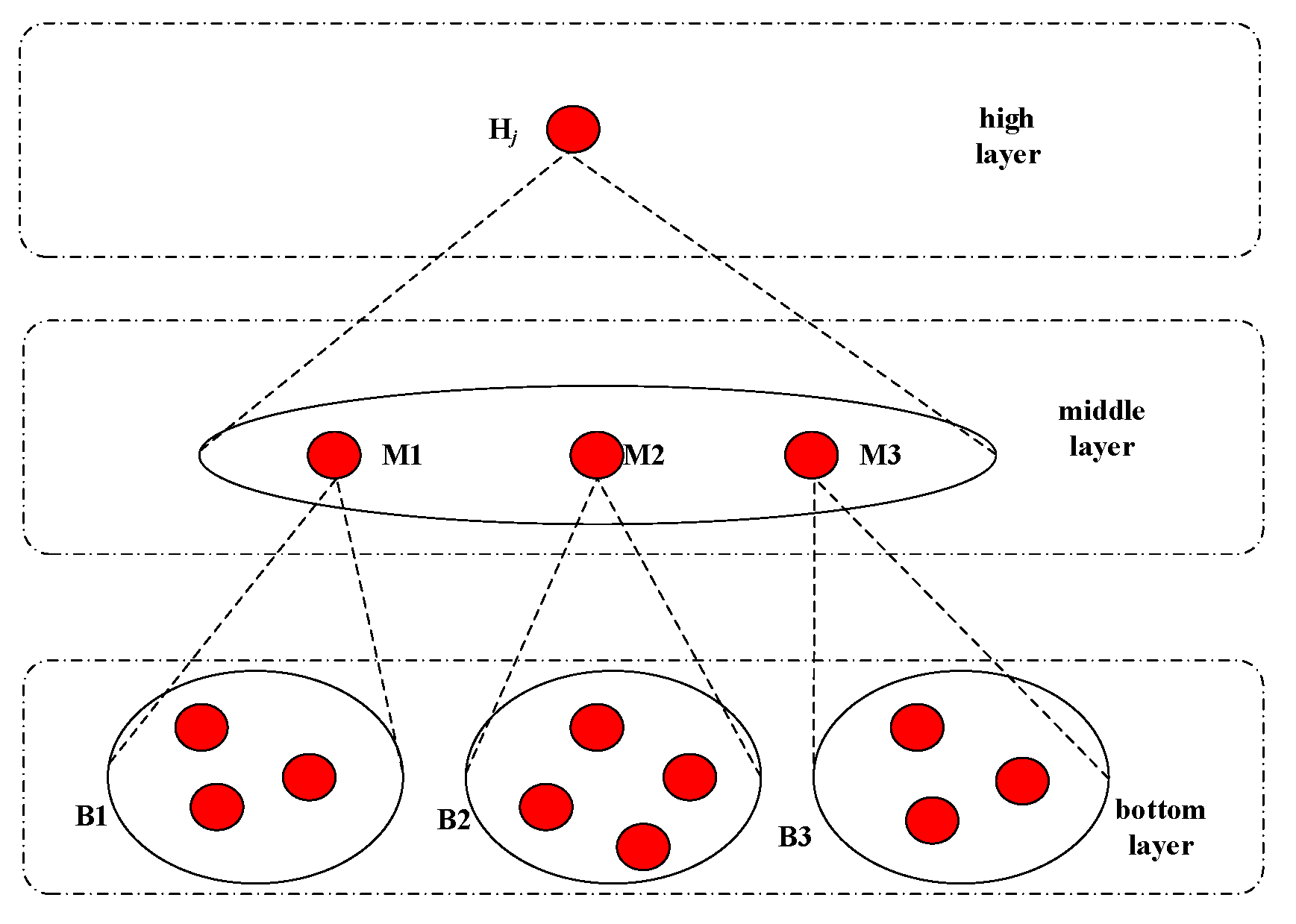
3.3. Probability Distribution Determination Method Based on Deep Combinatorial Network
4. Improved Particle Swarm Optimization Algorithm
4.1. Particle Swarm Optimization Algorithm and Its Shortcomings
4.2. Time-Period-Based Hierarchical PSO
4.3. Particle Grouping Strategy
4.4. Time Period
4.5. Algorithm Complexity Analysis
5. Passive Location Algorithm Flow of the Moving Target Based on Improved PSO
5.1. Objective Function
5.2. Constraints
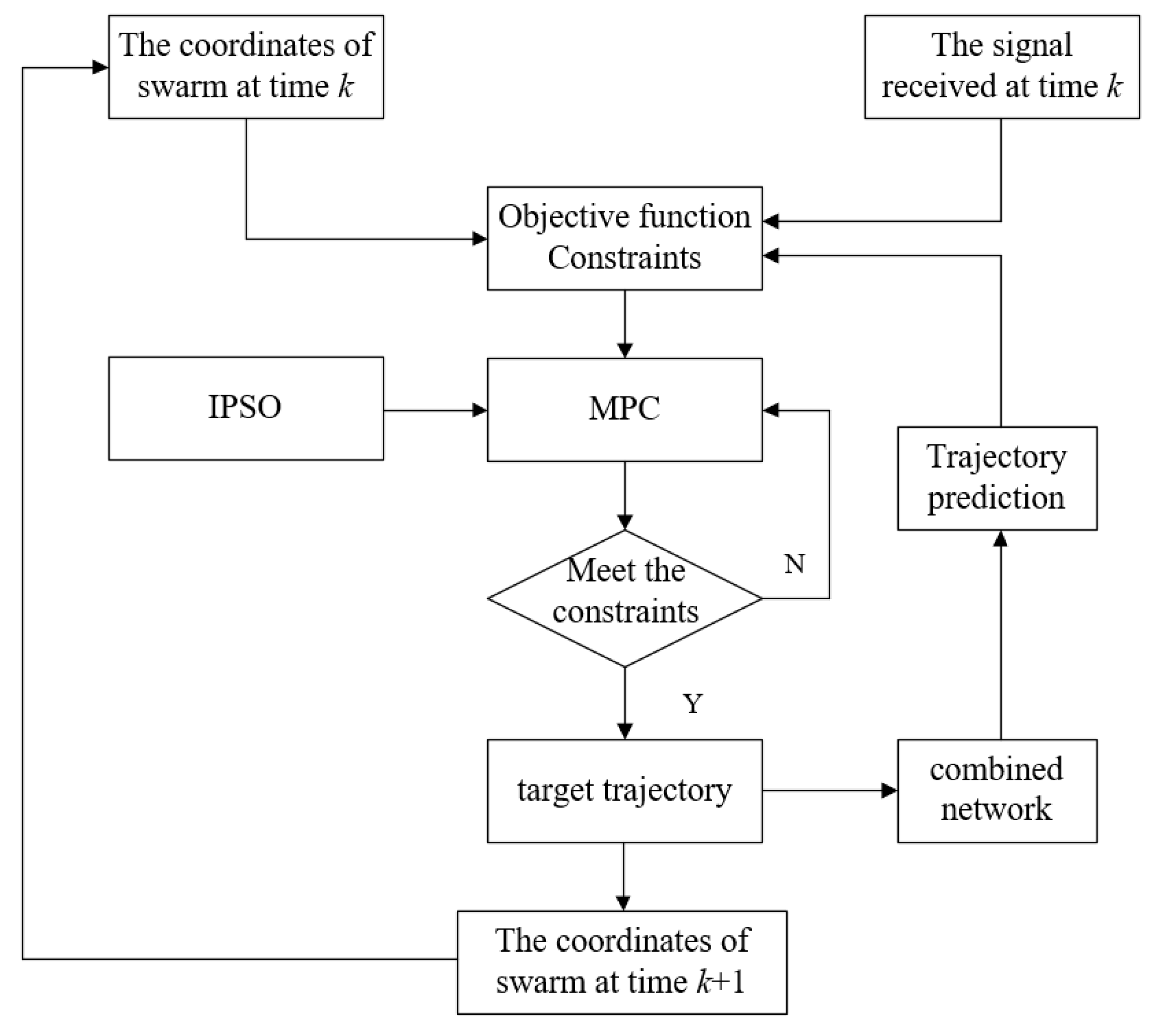
5.3. Algorithm Optimization Process
6. Simulation and Verification
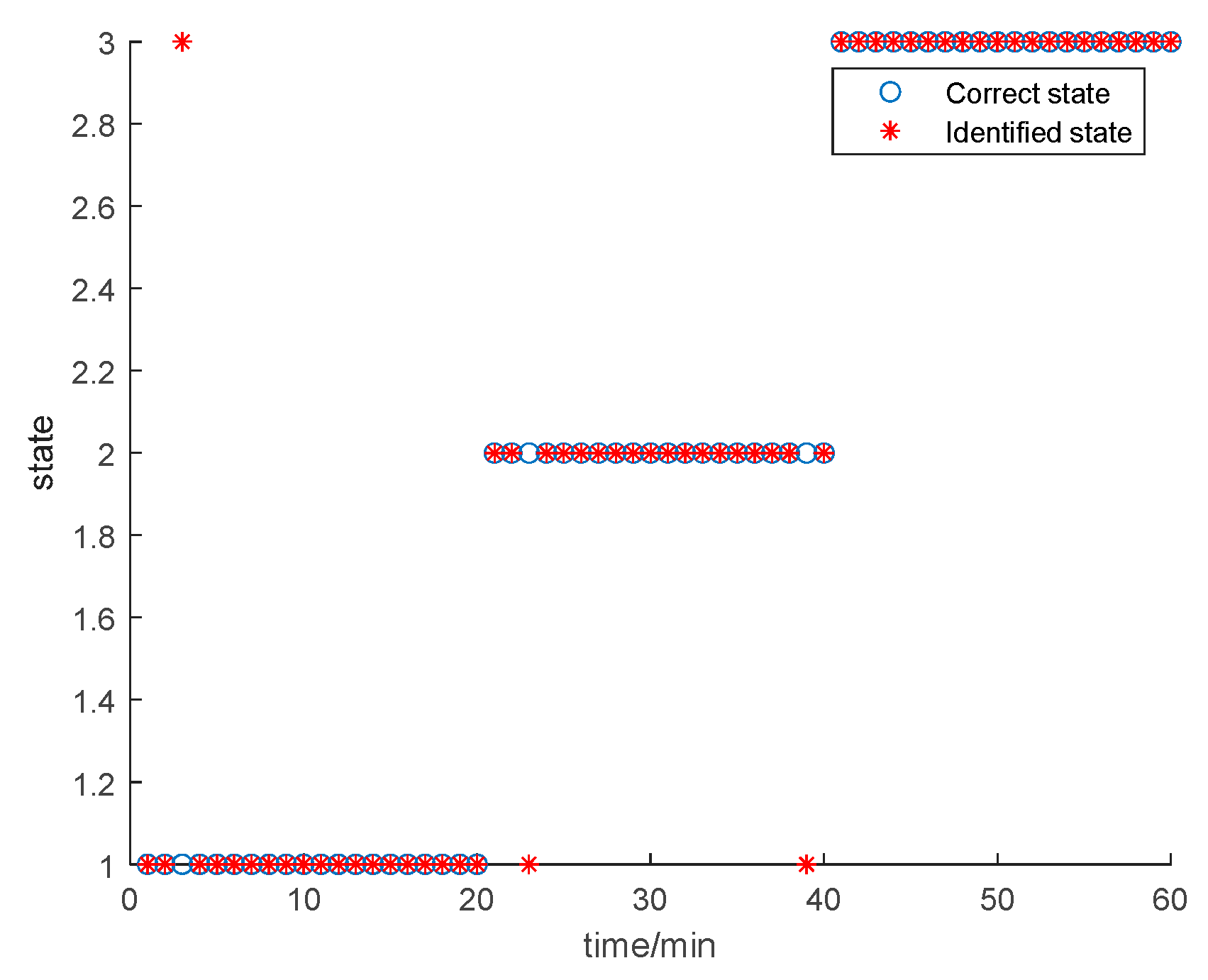
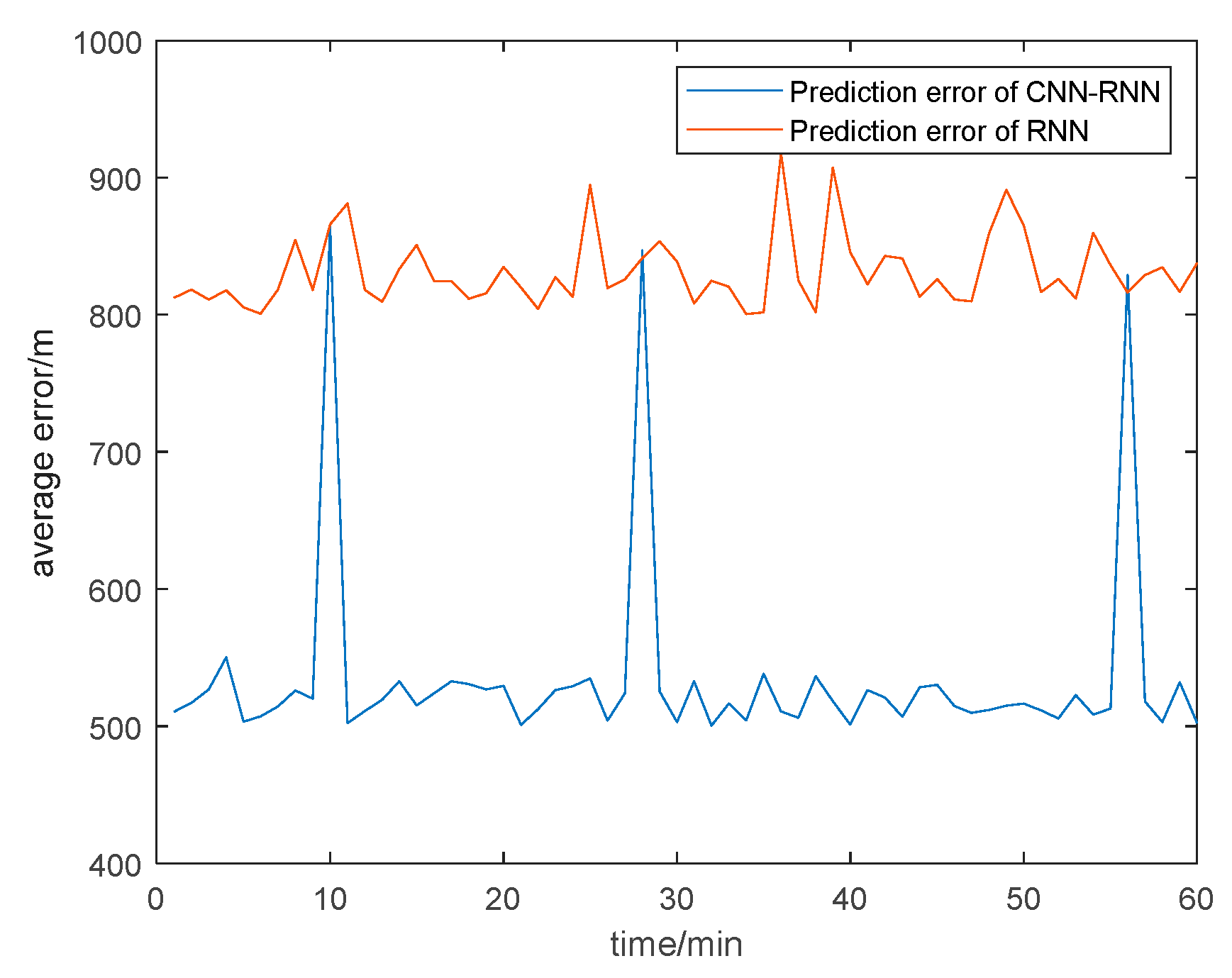
6.1. Performance Verification of Deep Networks
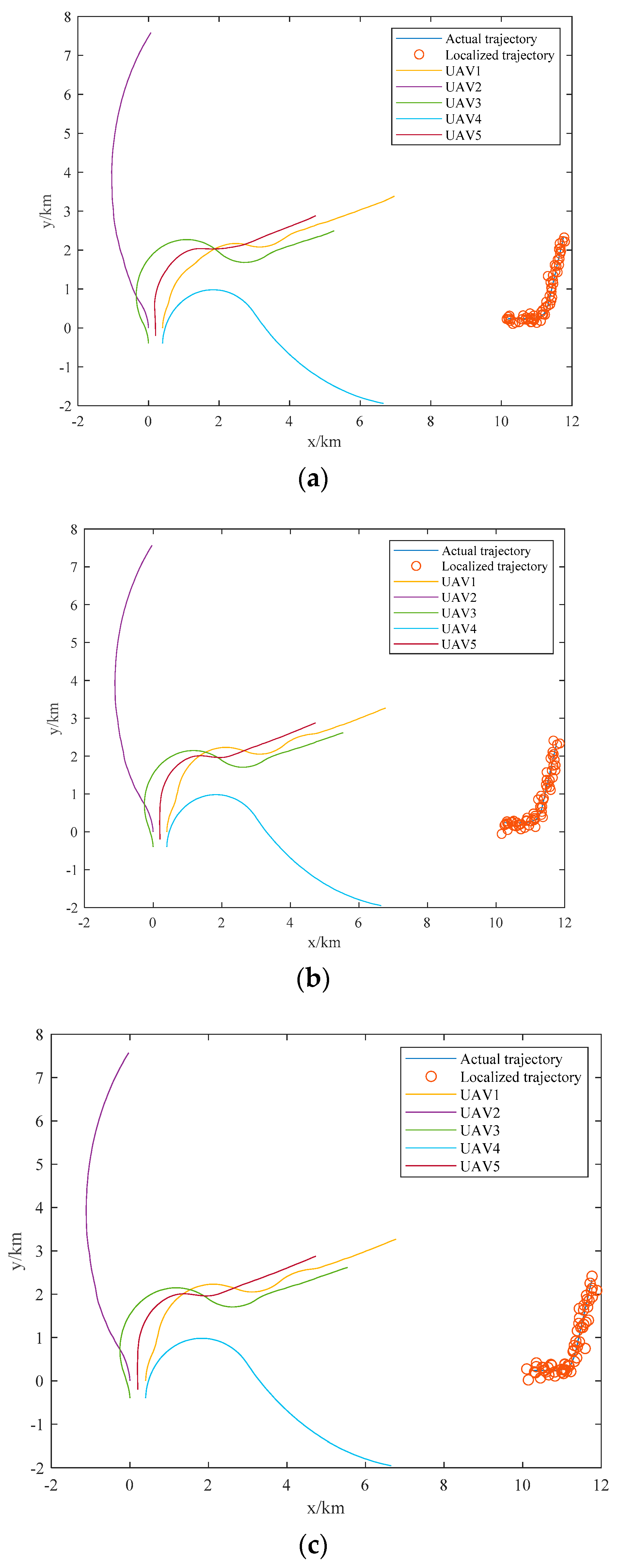
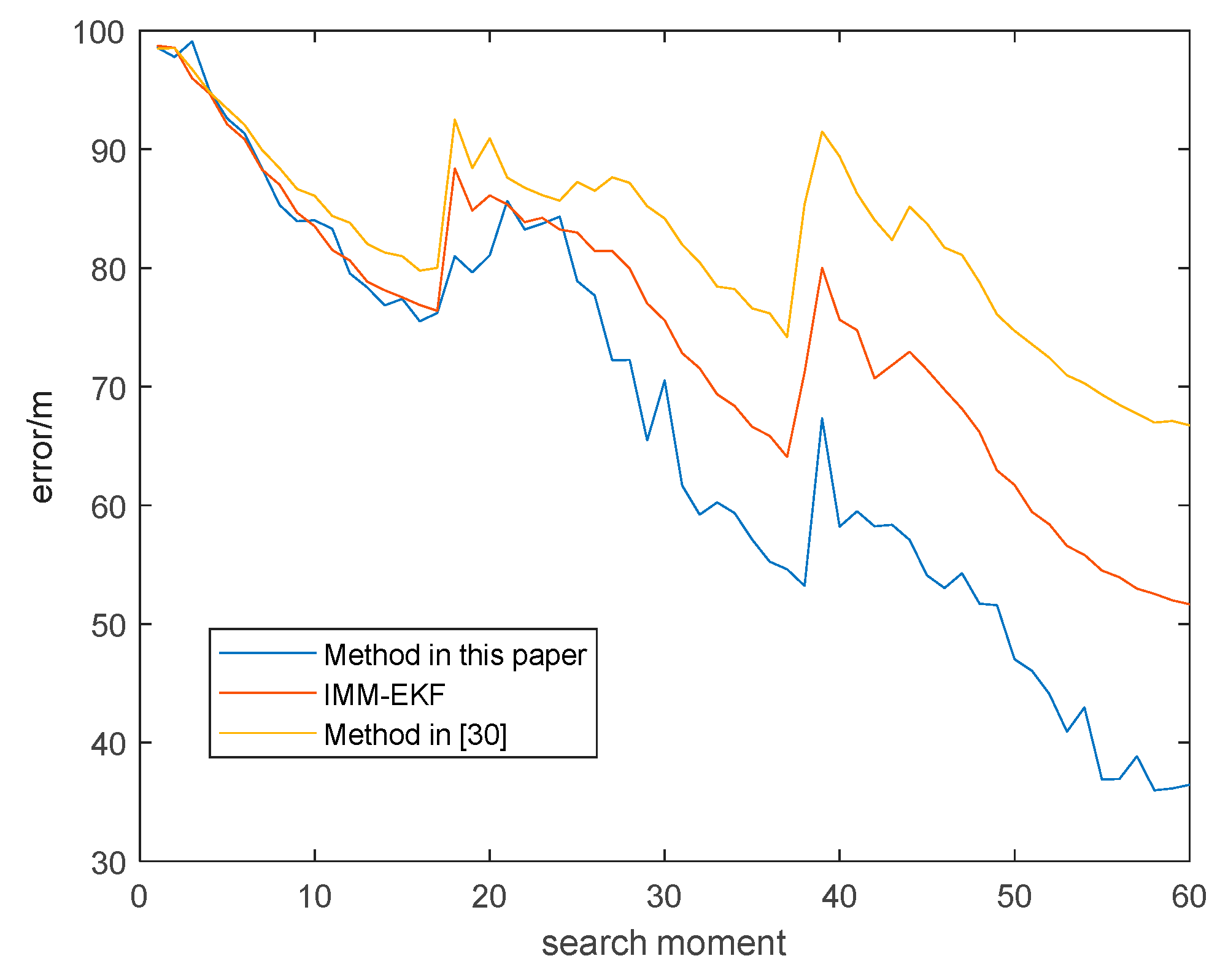
6.2. Passive Location Performance Verification and Algorithm Comparison
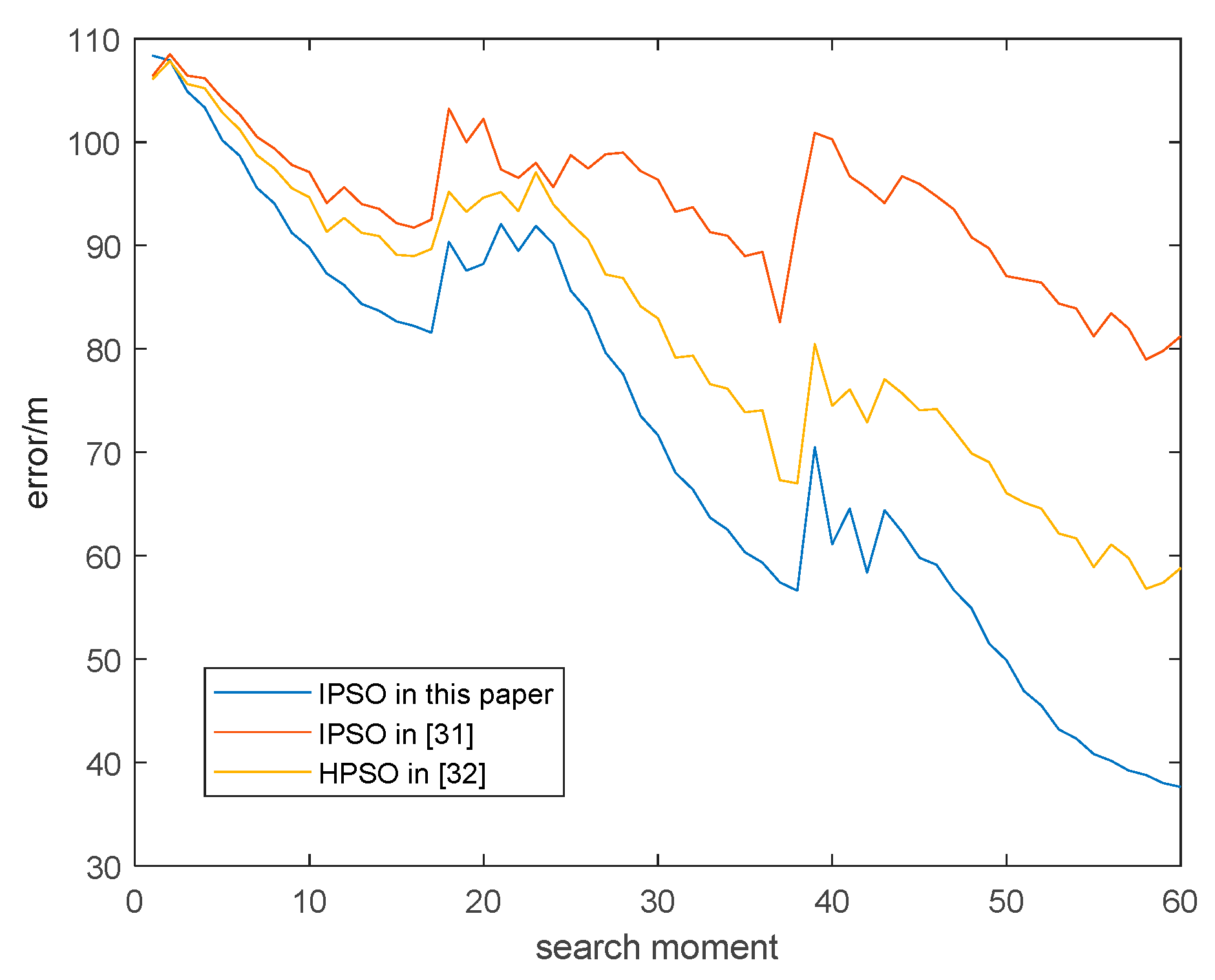
6.3. Optimization Algorithm Performance Comparison
7. Discussion
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zou, Y.; Wan, Q. Asynchronous Time-of-Arrival-Based Source Localization with Sensor Position Uncertainties. IEEE Commun. Lett. 2016, 20, 1860–1863. [Google Scholar] [CrossRef]
- Dang, L.; Yang, H.; Teng, B. Application of Time-Difference-of-Arrival Localization Method in Impulse System Radar and the Prospect of Application of Impulse System Radar in the Internet of Things. IEEE Access 2018, 6, 44846–44857. [Google Scholar] [CrossRef]
- Chitte, S.D.; Dasgupta, S.; Ding, Z. Distance Estimation from Received Signal Strength under Log-Normal Shadowing: Bias and Variance. IEEE Signal Process. Lett. 2009, 16, 216–218. [Google Scholar] [CrossRef]
- Cheng, Y.; Lin, Y. A new received signal strength based location estimation scheme for wireless sensor network. IEEE Trans. Consum. Electron. 2009, 55, 1295–1299. [Google Scholar] [CrossRef]
- Zhao, Y.; Hu, D.; Liu, Z.; Zhao, Y. Calibrating the Transmitter and Receiver Location Errors for Moving Target Localization in Multistatic Passive Radar. IEEE Access 2019, 7, 118173–118187. [Google Scholar] [CrossRef]
- Li, B.; Zhao, K.; Shen, X. Dilution of Precision in Location Systems Using both Angle of Arrival and Time of Arrival Measurements. IEEE Access 2020, 8, 192506–192516. [Google Scholar] [CrossRef]
- Wei, H.; Ye, S. Comments on “A Linear Closed-Form Algorithm for Source Localization from Time-Differences of Arrival”. IEEE Signal Process. Lett. 2008, 15, 895. [Google Scholar] [CrossRef]
- Abeywickrama, S.; Samarasinghe, T.; Ho, C.K.; Yuen, C. Wireless Energy Beamforming Using Received Signal Strength Indicator Feedback. IEEE Trans. Signal Process. 2018, 66, 224–235. [Google Scholar] [CrossRef]
- Maric, A.; Kaljic, E.; Njemcevic, P.; Lipovac, V. Projective Approach in Determining Homogeneous Hyperspherical Geometrically-Based Stochastic Channel Model’s Statistics: Angle of Departure, Angle of Arrival and Time of Arrival. IEEE Trans. Wirel. Commun. 2020, 19, 7864–7880. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, Y.; Ba, B.; Wang, D.; Li, X. Fast Joint Estimation of Time of Arrival and Angle of Arrival in Complex Multipath Environment Using OFDM. IEEE Access 2018, 6, 60613–60621. [Google Scholar] [CrossRef]
- Schau, H.; Robinson, A. Passive source localization employing intersecting spherical surfaces from time-of-arrival differences. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1223–1225. [Google Scholar] [CrossRef]
- Wang, X.; Huang, Z.; Zhou, Y. Underdetermined DOA estimation and blind separation of non-disjoint sources in time-frequency domain based on sparse representation method. J. Syst. Eng. Electron. 2014, 25, 17–25. [Google Scholar] [CrossRef]
- Zhang, M.; Guo, F.; Zhou, Y.; Yao, S. A Single Moving Observer Direct Position Determination Method Using Interferometer Phase Difference. Acta Aeronaut. Astronaut. Sin. 2013, 34, 2185–2193. [Google Scholar]
- Liu, Y.; Guo, F.; Yang, L.; Jiang, W. Source localization using a moving receiver and noisy TOA measurements. Signal Process. 2016, 119, 185–189. [Google Scholar] [CrossRef]
- Xi, L.; Guo, F.; Le, Y.; Min, Z. Improved solution for geolocating a known altitude source using TDOA and FDOA under random sensor location errors. Electron. Lett. 2018, 54, 597–599. [Google Scholar]
- Wang, G.H.; Bai, J.; He, Y.; Xiu, J.J. Optimal deployment of multiple passive sensors in the sense of minimum concentration ellipse. IET Radar Sonar Navig. 2009, 3, 8–17. [Google Scholar] [CrossRef]
- Bishop, A.N.; Fidan, B.; Anderson, B.D.O. Optimality Analysis of Sensor-Target Geometries in Passive Location: Part 2—Time-of-Arrival Based Localization. In Proceedings of the 3rd International Conference on Intelligent Sensors Sensor Networks and Information Processing, Melbourne, VIC, Australia, 3–6 December 2007. [Google Scholar]
- Bishop, A.N.; Fidan, B.; Anderson, B.D.O. Optimality Analysis of Sensor-Target Geometries in Passive Location: Part 1—Bearing-Only Localization. In Proceedings of the 3rd International Conference on Intelligent Sensors Sensor Networks and Information Processing, Melbourne, VIC, Australia, 3–6 December 2007; pp. 7–12. [Google Scholar]
- Lui, K.W.K.; So, H.C. A Study of Two-Dimensional Sensor Placement Using Time-Difference-of-Arrival Measurements. Digit. Signal Process. 2009, 19, 650–659. [Google Scholar] [CrossRef]
- Yang, B.; Scheuing, J. A Theoretical Analysis of 2D Sensor Arrays for TDOA Based Localization; ICASSP: Toulouse, France, 2006; pp. 901–904. [Google Scholar]
- Wu, Z.; Fu, K.; Jedari, E.; Shuvra, S.R.; Rashidzadeh, R.; Saif, M. A Fast and Resource Efficient Method for Indoor Location Using Received Signal Strength. IEEE Trans. Veh. Technol. 2016, 65, 9747–9758. [Google Scholar] [CrossRef]
- Xu, S.; Ou, Y.; Zheng, W. Optimal Sensor-Target Geometries for 3-D Static Target Localization Using Received-Signal-Strength Measurements. IEEE Signal Process. Lett. 2019, 26, 966–970. [Google Scholar] [CrossRef]
- Vaghefi, R.M.; Gholami, M.R.; Buehrer, R.M.; Strom, E.G. Cooperative Received Signal Strength-Based Sensor Localization with Unknown Transmit Powers. IEEE Trans. Signal Process. 2013, 61, 1389–1403. [Google Scholar] [CrossRef]
- Hemavathi, N.; Meenalochani, M.; Sudha, S. Influence of Received Signal Strength on Prediction of Cluster Head and Number of Rounds. IEEE Trans. Instrum. Meas. 2020, 69, 3739–3749. [Google Scholar] [CrossRef]
- So, H.C.; Lin, L. Linear Least Squares Approach for Accurate Received Signal Strength Based Source Localization. IEEE Trans. Signal Process. 2011, 59, 4035–4040. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1993; pp. 47, 73–76. [Google Scholar]
- Zhang, B.; Zhuang, L.; Gao, L.; Luo, W.; Ran, Q.; Du, Q. PSO-EM: A Hyperspectral Unmixing Algorithm Based on Normal Compositional Model. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7782–7792. [Google Scholar] [CrossRef]
- Sun, T.; Tang, C.; Tien, F. Post-Slicing Inspection of Silicon Wafers Using the HJ-PSO Algorithm under Machine Vision. IEEE Trans. Semicond. Manuf. 2011, 24, 80–88. [Google Scholar] [CrossRef]
- Hernandez, M.; Farina, A. PCRB and IMM for Target Tracking in the Presence of Specular Multipath. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2437–2449. [Google Scholar] [CrossRef]
- Yongsheng, Z.; Dexiu, H.; Yongjun, Z.; Zhixin, L. Moving target localization for multistatic passive radar using delay, Doppler and Doppler rate measurements. J. Syst. Eng. Electron. 2020, 31, 939–949. [Google Scholar] [CrossRef]
- Mistry, K.; Zhang, L.; Neoh, S.C.; Lim, C.P.; Fielding, B. A Micro-GA Embedded PSO Feature Selection Approach to Intelligent Facial Emotion Recognition. IEEE Trans. Cybern. 2017, 47, 1496–1509. [Google Scholar] [CrossRef]
- Roshanzamir, M.; Balafar, M.A.; Razavi, S.N. Empowering particle swarm optimization algorithm using multi agents’ capability: A holonic approach. Knowl. Based Syst. 2017, 136, 58–74. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Functions Implemented | Algorithm in This Paper | Article [8] | Article [13] | Article [20] |
|---|---|---|---|---|
| Improved location algorithm | Yes | Yes | Yes | No |
| Location using multiple stations | Yes | No | No | Yes |
| Real-time optimization trajectory | Yes | No | No | No |
| Positioning by target’s motion characteristics | Yes | No | No | No |
| Time Consumption | Algorithm in This Paper | IMM-EKF | Method in [30] |
|---|---|---|---|
| Average total time | 163.26 | 205.81 | 732.42 |
| Average time for each point | 2.71 | 3.43 | 12.21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, L.; Xiangyu, F.; Manhong, S. Research on the Cooperative Passive Location of Moving Targets Based on Improved Particle Swarm Optimization. Drones 2023, 7, 264. https://doi.org/10.3390/drones7040264
Hao L, Xiangyu F, Manhong S. Research on the Cooperative Passive Location of Moving Targets Based on Improved Particle Swarm Optimization. Drones. 2023; 7(4):264. https://doi.org/10.3390/drones7040264
Chicago/Turabian StyleHao, Li, Fan Xiangyu, and Shi Manhong. 2023. "Research on the Cooperative Passive Location of Moving Targets Based on Improved Particle Swarm Optimization" Drones 7, no. 4: 264. https://doi.org/10.3390/drones7040264
APA StyleHao, L., Xiangyu, F., & Manhong, S. (2023). Research on the Cooperative Passive Location of Moving Targets Based on Improved Particle Swarm Optimization. Drones, 7(4), 264. https://doi.org/10.3390/drones7040264