

Tracking Multiple Unmanned Aerial Vehicles through Occlusion in Low-Altitude Airspace
 , ,
, ,  and
and
Abstract
1. Introduction
2. Problem Discussion
2.1. Markov-Chain Model of Target Existence
2.2. Sensor Measurement Model
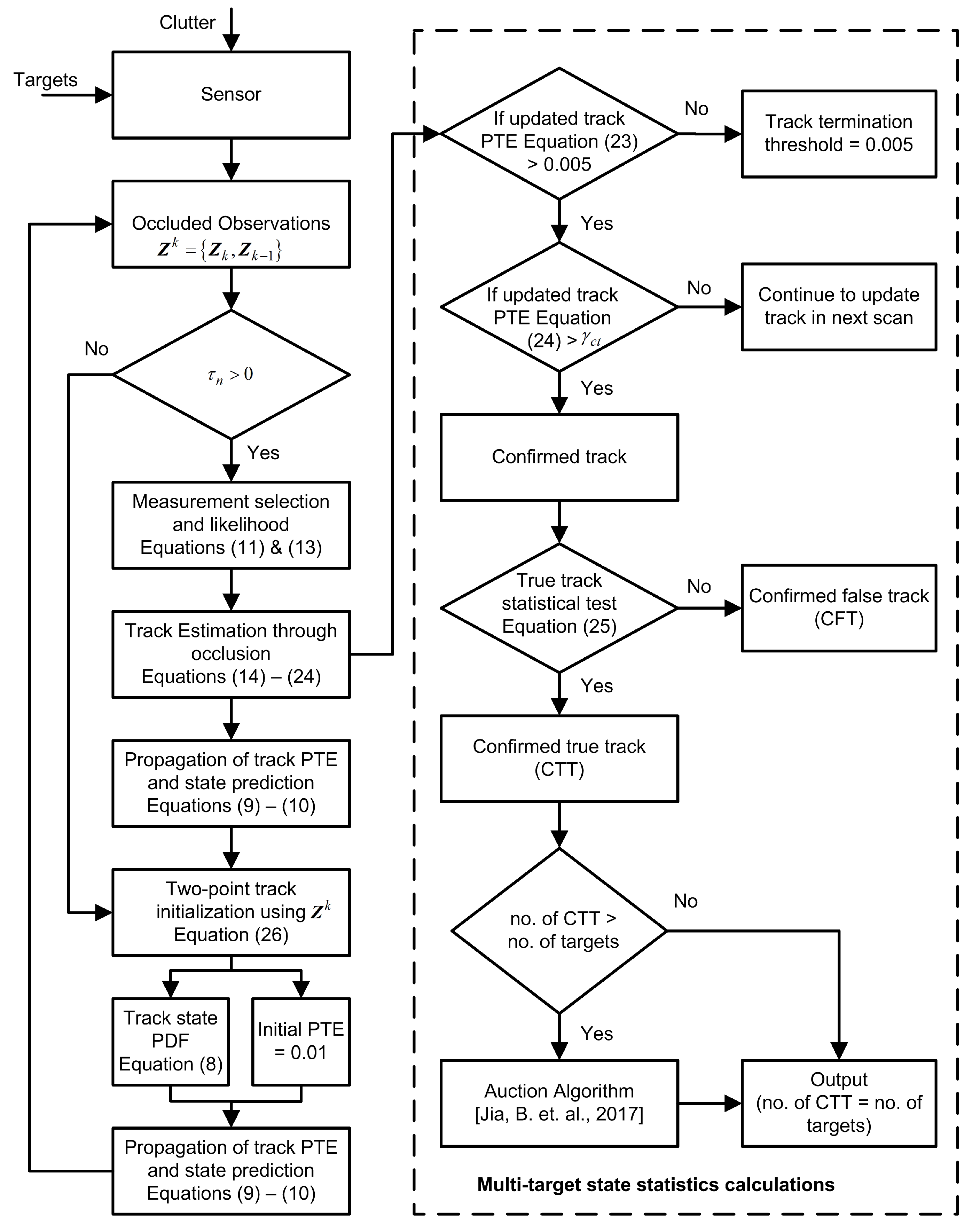
3. Integration of LMIPDA and MC2 (LMIPDA-MC2)
4. False-Track Discrimination (FTD)
5. Illustrative Simulation and Experimental Results
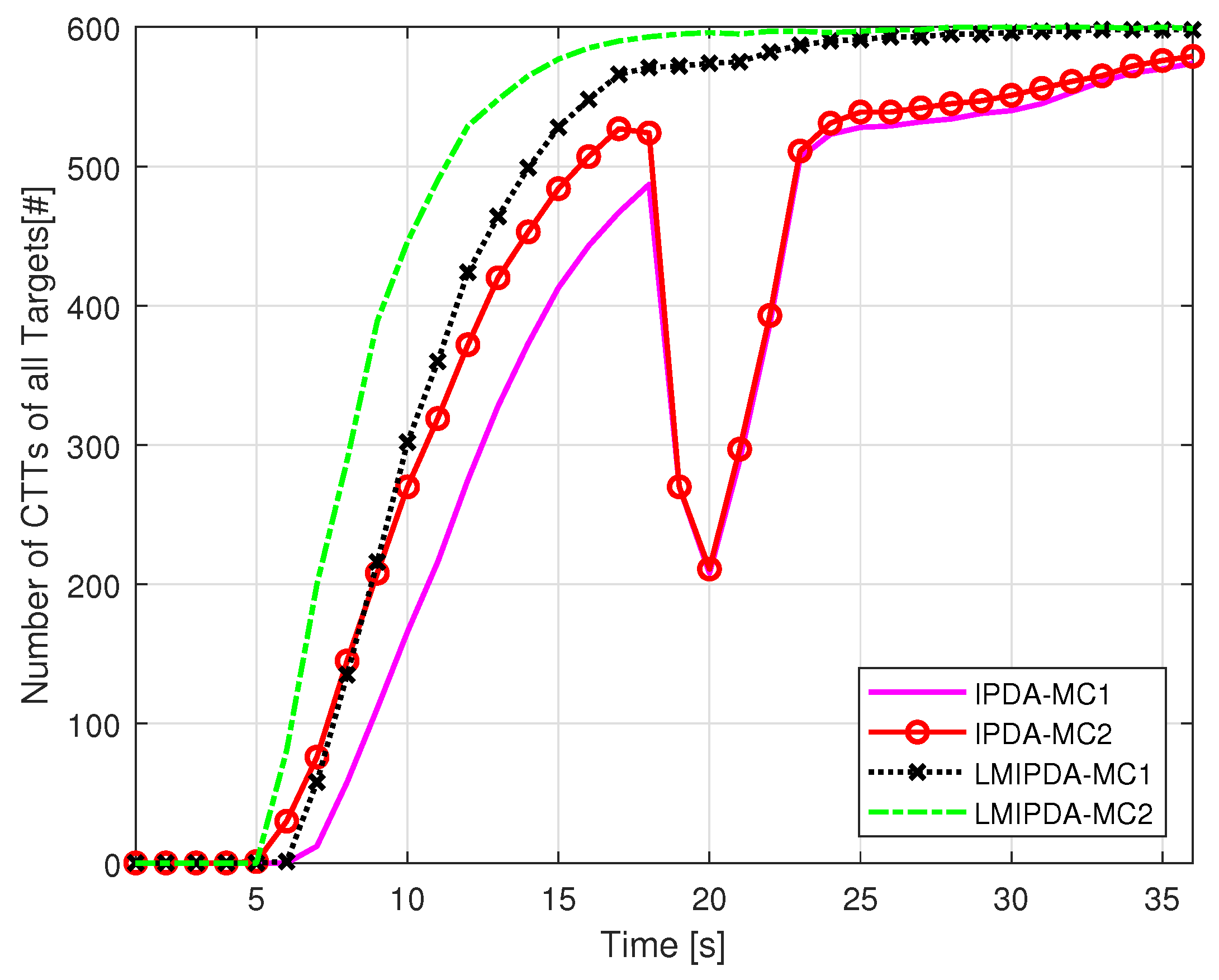
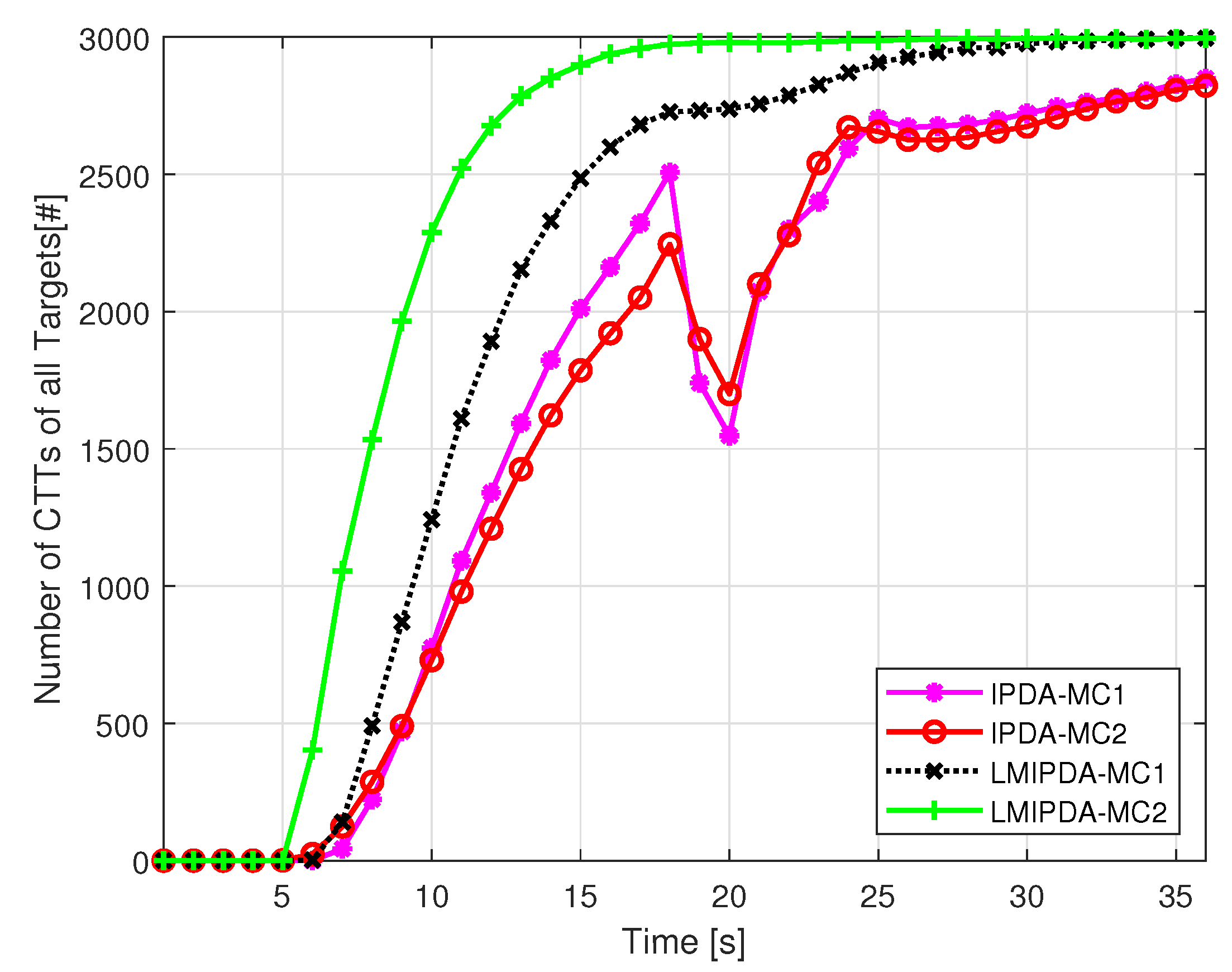
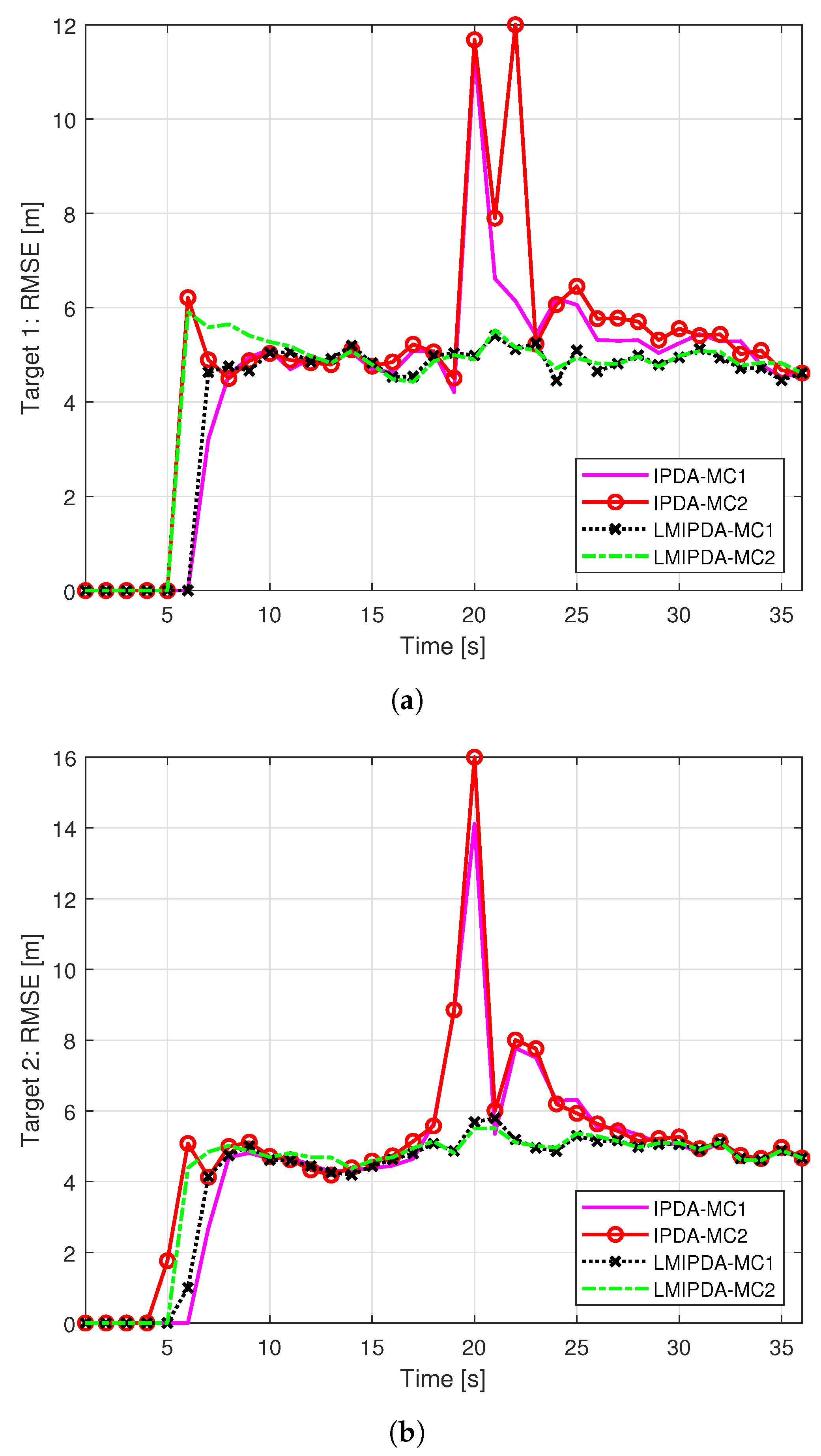
5.1. Monte Carlo Simulation Results
- Case: to obtain the total number of confirmed track pursuing the original target in scan .
- Okay: to obtain the total number of CTTs that still retain the original target in scan .
- Switched: to obtain the total number of CTTs that switched the original target to some other CTT and now pursue a different target in scan .
- Lost: to obtain the total number of CTTs that were lost in scan because they were either terminated or they became CFTs.
- End: to obtain the total number of CTTs at the end scan .
- Execution time [s]: the average execution time per run.
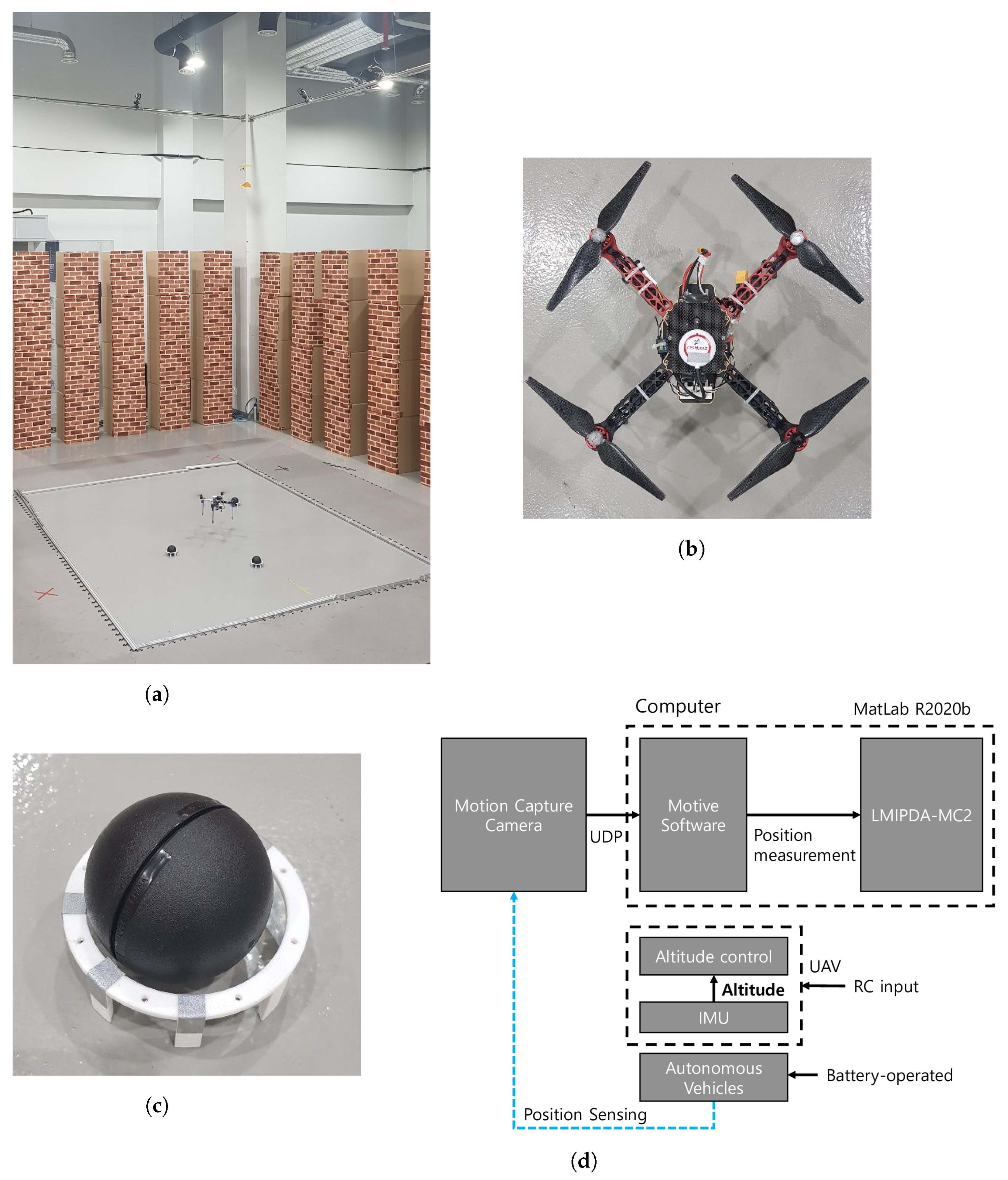
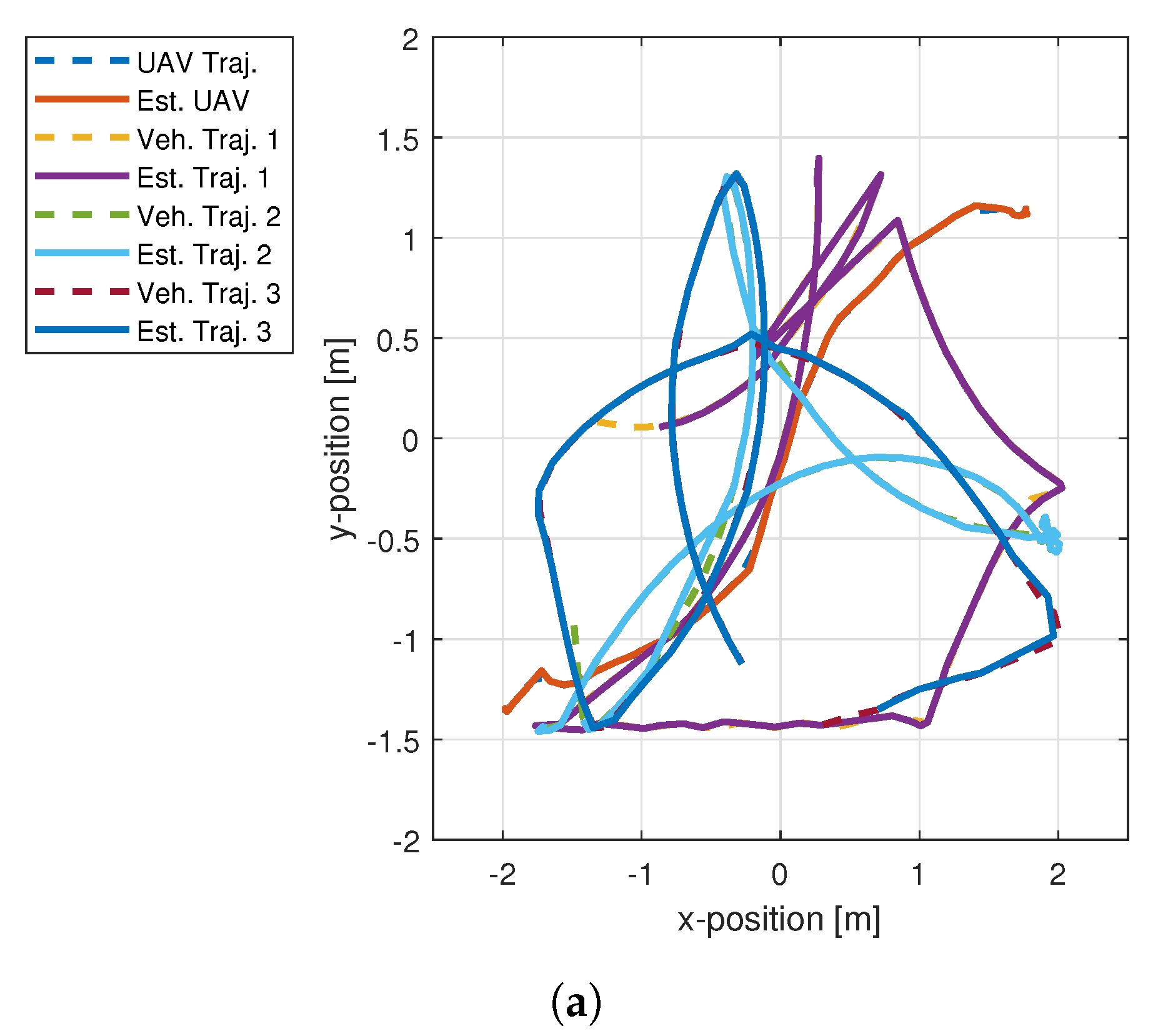
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Garca, F.; Prioletti, A.; Cerri, P.; Broggi, A. PHD filter for vehicle tracking based on a monocular camera. Expert Syst. Appl. 2018, 91, 472–479. [Google Scholar] [CrossRef]
- Regragui, Y.; Moussa, N. A real-time path planning for reducing vehicles traveling time in cooperative-intelligent transportation systems. Simul. Model. Pract. Theory 2023, 123, 102710. [Google Scholar] [CrossRef]
- Furtado, J.S.; Lai, G.; Lacheray, H.; Desuoza-Coelho, J. Advances in Motion Sensing and Control for Robotic Applications; Janabi-Sharifi, F., Melek, M., Eds.; Chapter Comparative Analysis of OptiTrack Motion Capture Systems; Springer Nature: Cham, Switzerland, 2018; pp. 15–31. [Google Scholar]
- Pattan, P.; Arjunagi, S. A human behavior analysis model to track object behavior in surveillance videos. Meas. Sens. 2022, 24, 100454. [Google Scholar]
- Zhang, S.; Zheng, K.; Huaiyuan, S. Analysis of the Occlusion Interference Problem in Target Tracking. Math. Probl. Eng. 2022, 2022, 10. [Google Scholar] [CrossRef]
- Sebastian, D. Application of the Motion Capture System to Estimate the Accuracy of a Wheeled Mobile Robot Localization. Energies 2020, 13, 6437. [Google Scholar]
- Challa, S.; Evans, R.; Morelande, M.; Mušicki, D. Fundamentals of Object Tracking; Cambridge University Press: New York, NY, USA, 2011. [Google Scholar]
- Bar-Shalom, Y.; Daum, F.; Huang, J. The probabilistic data association filter. IEEE Control Syst. Mag. 2009, 29, 82–100. [Google Scholar]
- Chen, X.; Li, Y.; Li, Y.; Yu, J.; Li, X. A Novel Probabilistic Data Association for Target Tracking in a Cluttered Environment. Sensors 2016, 16, 2180. [Google Scholar] [CrossRef]
- Mušicki, D.; Evans, R.; Stankovic, S. Integrated probabilistic data association. IEEE Trans. Autom. Control 1994, 39, 1237–1241. [Google Scholar] [CrossRef]
- Song, T.L.; Mušicki, D. Target tracking with target state dependent detection. IEEE Trans. Signal Process. 2011, 59, 1063–1074. [Google Scholar] [CrossRef]
- He, S.; Shin, H.-S.; Tsourdos, S. Multi-sensor multi-target tracking using domain knowledge and clustering. IEEE Sens. J. 2018, 18, 8074–8084. [Google Scholar] [CrossRef]
- Ni, L.-Q.; Gao, S.-S.; Feng, P.-C.; Zhao, K. Rough Sets Probabilistic Data Association Algorithm and its Application in Multi-target Tracking. Def. Technol. 2013, 9, 208–2016. [Google Scholar] [CrossRef]
- Sathyan, T.; Chin, T.; Arulampalam, S.; Suter, D. A Multiple Hypothesis Tracker for Multitarget Tracking with Multiple Simultaneous Measurements. IEEE J. Sel. Top. Signal Process. 2013, 7, 448–460. [Google Scholar] [CrossRef]
- Mušicki, D.; Evans, R. JIPDA: Automatic target tracking avoiding track coalescence. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 962–974. [Google Scholar]
- Asad, M.; Khan, S.; Mehmood, Z.; Shi, Y.; Memon, S.A.; Khan, U. A split target detection and tracking algorithm for ballistic missile tracking during the re-entry phase. Def. Technol. 2020, 16, 1142–1150. [Google Scholar] [CrossRef]
- Song, T.L.; Mušicki, D.; Yong, K. Multi-target tracking with state dependent detection. IET Radar Sonar Navig. 2015, 9, 10–18. [Google Scholar] [CrossRef]
- Lee, E.H.; Zhang, Q.; Song, T.L. Markov Chain Realization of Joint Integrated Probabilistic Data Association. Sensors 2017, 17, 2865. [Google Scholar] [CrossRef]
- Mušicki, D.; Scala, B.L. Multi-target tracking in clutter without measurement assignment. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 877–896. [Google Scholar] [CrossRef]
- Mušicki, D.; Song, T.L.; Lee, H. Linear multitarget finite resolution tracking in clutter. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1798–1812. [Google Scholar] [CrossRef]
- Shin, M.; Son, H. Multiple Sensor Linear Multi-Target Integrated Probabilistic Data Association for Ultra-Wide Band Radar. IEEE Access 2020, 8, 227161–227171. [Google Scholar] [CrossRef]
- Huang, Y.; Song, T.L.; Kim, D. Linear Multitarget Integrated Probabilistic Data Association for Multiple Detection Target Tracking. IET Radar Sonar Navig. 2018, 12, 945–953. [Google Scholar] [CrossRef]
- Mušicki, D.; Evans, R. Clutter map information for data association and track initialization. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 387–398. [Google Scholar] [CrossRef]
- Wang, X.; Mušicki, D. Low elevation sea-surface target tracking using IPDA type filters. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 759–774. [Google Scholar] [CrossRef]
- Song, T.L.; Mušicki, D.; Kim, Y. Tracking through Occlusions and Track Segmentation Reduction. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 623–631. [Google Scholar] [CrossRef]
- Kim, Y.; Song, T.L. A Study of Image Target Tracking Using ITS in an Occluding Environment. J. Inst. Control Robot. Syst. 2013, 19, 1457–1466. [Google Scholar] [CrossRef]
- Song, T.L.; Musicki, D. Adaptive clutter measurement density estimation for improved target tracking. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1457–1466. [Google Scholar] [CrossRef]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice with MATLAB; John Wiley and Sons: New York, NY, USA, 2014. [Google Scholar]
- Jia, B.; Pham, K.; Blasch, E.; Shen, D.; Chen, G. Consensus-based auction algorithm for distributed sensor management in space object tracking. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; Wiley and Sons, Inc.: New York, NY, USA, 2004. [Google Scholar]
- Kim, M.; Memon, S.A.; Shin, M.; Son, H. Dynamic based trajectory estimation and tracking in an uncertain environment. Expert Syst. Appl. 2021, 177, 114919. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Case | Okay | Switched | Lost | End | time [s] |
|---|---|---|---|---|---|---|
| IPDA-MC1 | 517 | 449 | 38 | 30 | 574 | 0.3 |
| IPDA-MC2 | 513 | 422 | 56 | 35 | 561 | 0.4 |
| LMIPDA-MC1 | 568 | 550 | 16 | 2 | 595 | 0.2 |
| LMIPDA-MC2 | 600 | 598 | 2 | 0 | 599 | 0.5 |
| Parameter | Description | Value |
|---|---|---|
| Surveillance region | ||
| Measurement noise covariance | ||
| Number of scans | Number of time steps | 83 |
| T | Sampling time between scans | |
| Detection probability | ||
| Clutter measurement density | ||
| Validation measurement-selection threshold | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Memon, S.A.; Son, H.; Kim, W.-G.; Khan, A.M.; Shahzad, M.; Khan, U. Tracking Multiple Unmanned Aerial Vehicles through Occlusion in Low-Altitude Airspace. Drones 2023, 7, 241. https://doi.org/10.3390/drones7040241
Memon SA, Son H, Kim W-G, Khan AM, Shahzad M, Khan U. Tracking Multiple Unmanned Aerial Vehicles through Occlusion in Low-Altitude Airspace. Drones. 2023; 7(4):241. https://doi.org/10.3390/drones7040241
Chicago/Turabian StyleMemon, Sufyan Ali, Hungsun Son, Wan-Gu Kim, Abdul Manan Khan, Mohsin Shahzad, and Uzair Khan. 2023. "Tracking Multiple Unmanned Aerial Vehicles through Occlusion in Low-Altitude Airspace" Drones 7, no. 4: 241. https://doi.org/10.3390/drones7040241
APA StyleMemon, S. A., Son, H., Kim, W.-G., Khan, A. M., Shahzad, M., & Khan, U. (2023). Tracking Multiple Unmanned Aerial Vehicles through Occlusion in Low-Altitude Airspace. Drones, 7(4), 241. https://doi.org/10.3390/drones7040241