
YOLO-Based UAV Technology: A Review of the Research and Its Applications


 and
and 
Abstract
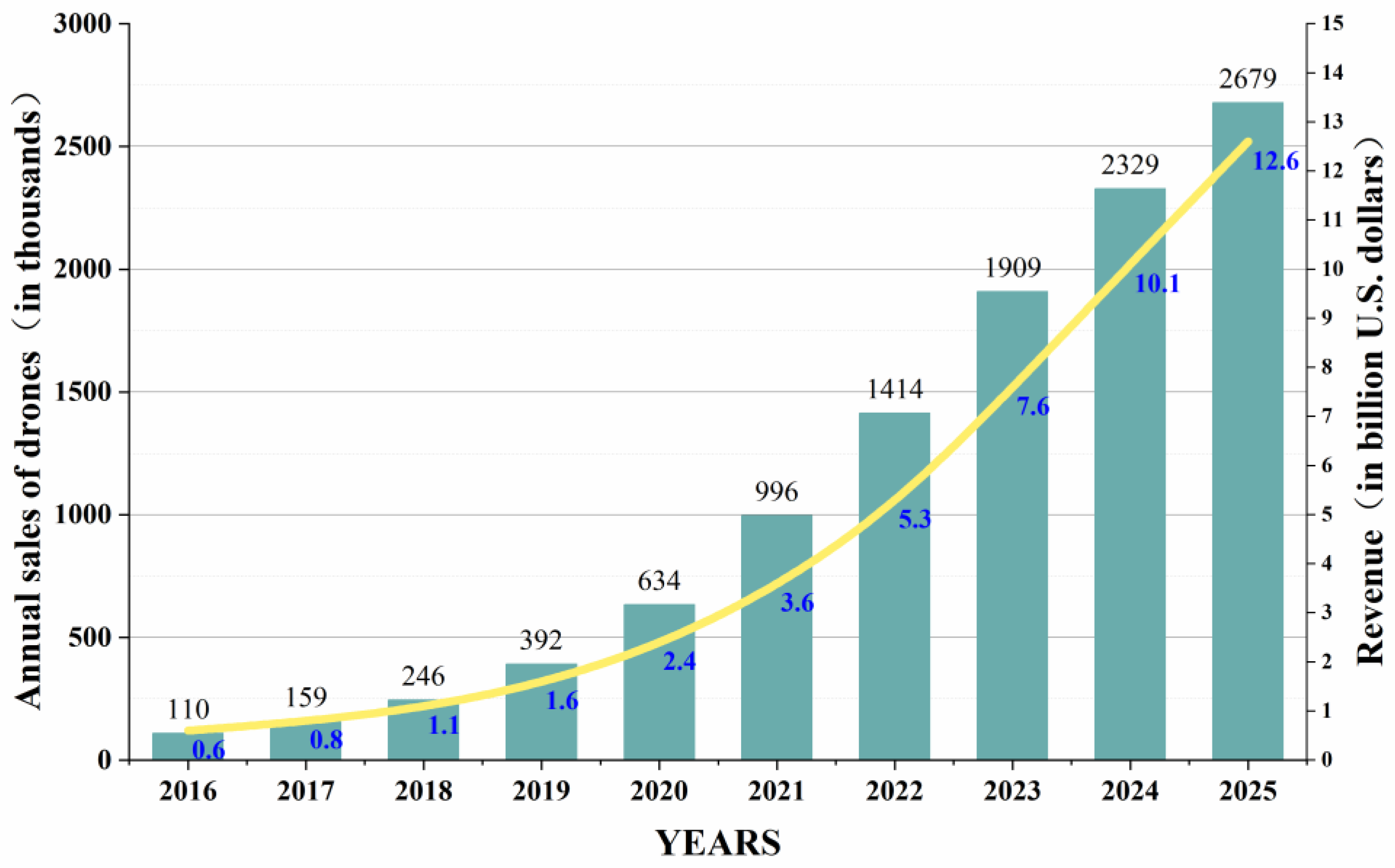
1. Introduction
2. Survey Methodology
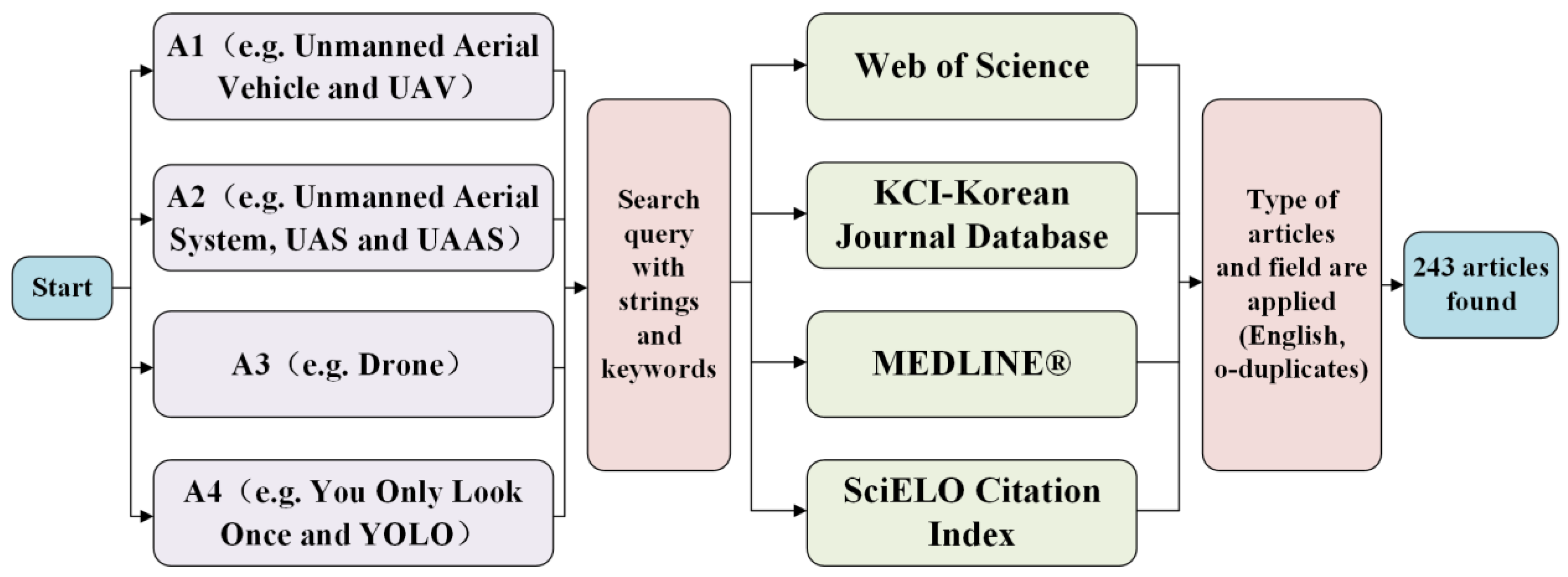
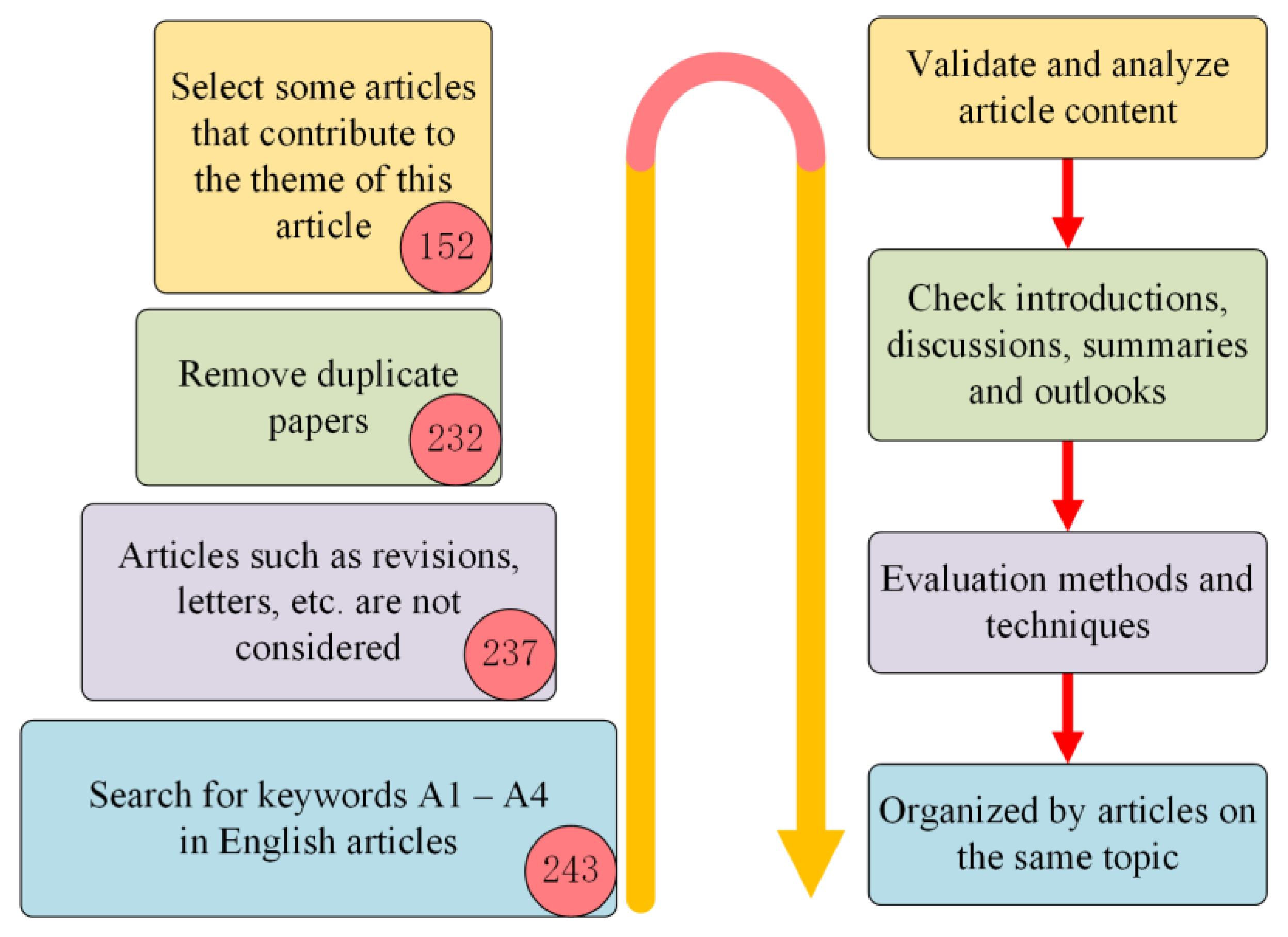
2.1. Screening Methods for Research Papers Related to YBUT
2.2. Research Topics Utilizing YBUT
3. YBUT Development
3.1. Early Development of YBUT
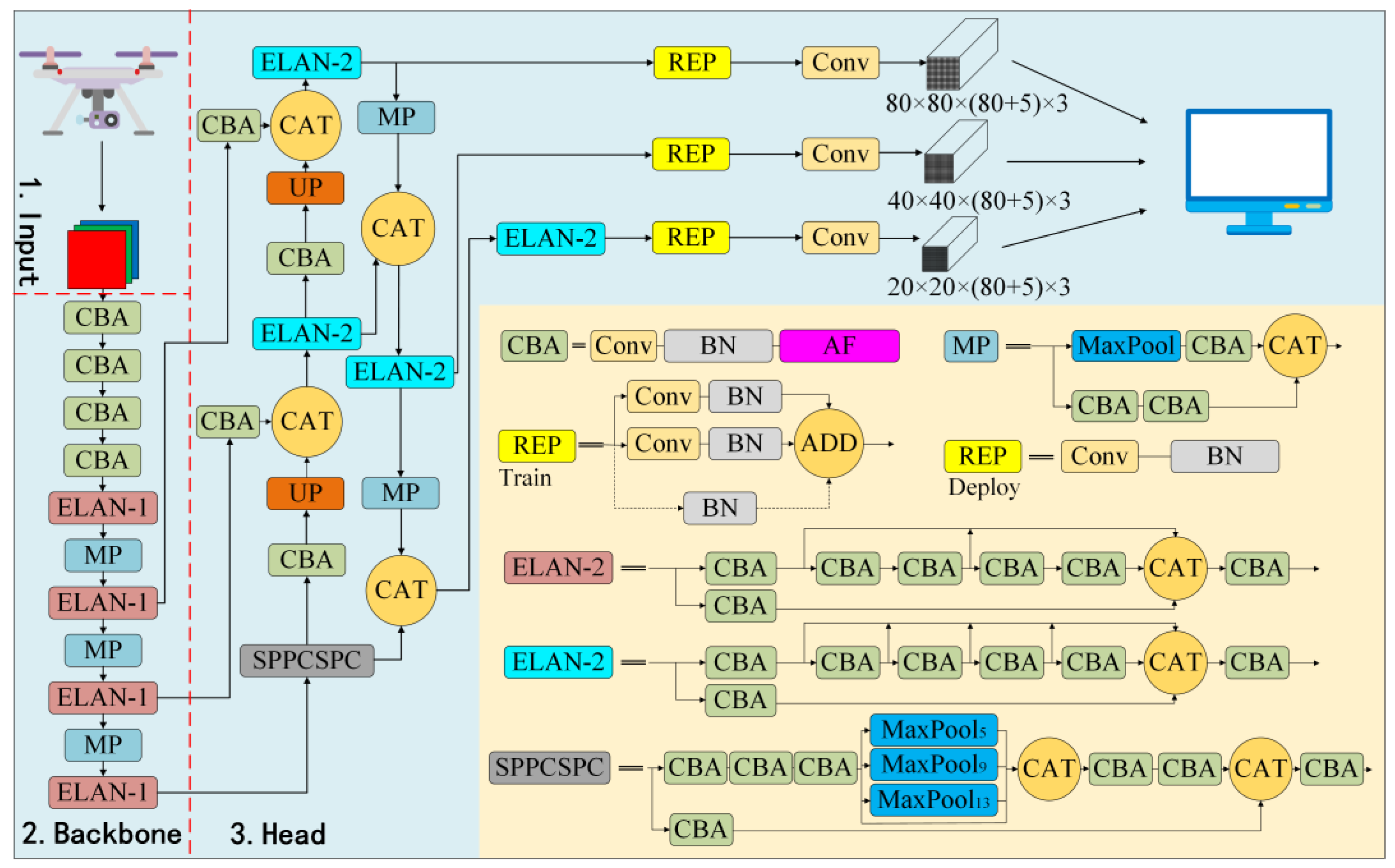
3.2. YBUT Develops by Leaps and Bounds
4. Practical Applications of YBUT in Several Fields
4.1. Related Applications in the Field of Engineering
4.2. Related Applications in the Field of Transportation
4.3. Related Applications in the Field of Agriculture
4.4. Related Applications in the Field of Automation
4.5. Related Applications in Other Fields
5. Development Prospects
5.1. Improving the Quality of UAV Datasets and Training YOLO Algorithms Suitable for Aerial Imagery
5.2. Research into Object Detection Algorithms Suitable for UAV-Embedded Processors
5.3. Developing Professional, Stable, and Reliable UAVs in Combination with the YOLO Inspection Environment
5.4. Enhancing the Security of YBUT for Multiple Application Scenarios
5.5. Popularising YBUT Knowledge, Training Technical Application Talents, and Improving Relevant Laws, Regulations, and Codes of Practice
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Acronyms | Definition |
| UAV | Unmanned aerial vehicle |
| YOLO | You Only Look Once |
| YBUT | YOLO-based UAV technology |
| UAVs | Unmanned aerial vehicles |
| FPS | Frames Per Second |
| mAP | Mean average precision |
| Faster R-CNN | Faster regional Convolutional Neural Network |
| RFCN | Region-based Fully Convolutional Network |
| SNIPER | Scale Normalization for Image Pyramids with Efficient Resampling |
| IoU | Intersection over union |
| F1 | Harmonic mean of precision and recall |
| AP | Average precision |
| VPU | Vision Processing Unit |
| PID | Proportional Integral Differential |
| SLAM | Simultaneous localization and mapping |
| GPS | Global Positioning System |
| DEEPSORT | Deep Simple Online and Realtime Tracking |
References
- Fan, B.; Li, Y.; Zhang, R.; Fu, Q. Review on the technological development and application of UAV systems. Chin. J. Electron. 2020, 29, 199–207. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Jiang, P.Y.; Ergu, D.; Liu, F.Y.; Cai, Y.; Ma, B. A review of yolo algorithm developments. In Proceedings of the 8th International Conference on Information Technology and Quantitative Management (ITQM)—Developing Global Digital Economy after COVID-19, Chengdu, China, 9–11 July 2021; pp. 1066–1073. [Google Scholar]
- Ahmad, F.; Qiu, B.; Dong, X.; Ma, J.; Huang, X.; Ahmed, S.; Chandio, F.A. Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron. Agric. 2020, 172, 105305. [Google Scholar] [CrossRef]
- Gasparovic, M.; Zrinjski, M.; BarkoviC, D.; Radocaj, D. An automatic method for weed mapping in oat fields based on UAV imagery. Comput. Electron. Agric. 2020, 173, 105385. [Google Scholar] [CrossRef]
- Chu, L.; Li, X.; Xu, J.; Neiat, A.G.; Liu, X. A holistic service provision strategy for drone-as-a-service in MEC-based UAV delivery. In Proceedings of the IEEE International Conference on Web Services (ICWS)/IEEE World Congress on Services (IEEE SERVICES), Chicago, IL, USA, 5–11 September 2021; pp. 669–674. [Google Scholar]
- Nath, N.D.; Cheng, C.S.; Behzadan, A.H. Drone mapping of damage information in GPS-Denied disaster sites. Adv. Eng. Inform. 2022, 51, 101450. [Google Scholar] [CrossRef]
- Abate, A.F.; De Maio, L.; Distasi, R.; Narducci, F. Remote 3D face reconstruction by means of autonomous unmanned aerial vehicles. Pattern Recognit. Lett. 2021, 147, 48–54. [Google Scholar] [CrossRef]
- Su, D.; Yao, W.; Yu, F.; Liu, Y.; Zheng, Z.; Wang, Y.; Xu, T.; Chen, C. Single-neuron PID UAV variable fertilizer application control system based on a weighted coefficient learning correction. Agriculture 2022, 12, 1019. [Google Scholar] [CrossRef]
- Li, Y.; Dai, Z. Abnormal behavior detection in crowd scene using YOLO and Conv-AE. In Proceedings of the 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 1720–1725. [Google Scholar]
- Yu, J.; Zhang, W. Face mask wearing detection algorithm based on improved YOLO-v4. Sensors 2021, 21, 3263. [Google Scholar] [CrossRef]
- Rivero-Palacio, M.; Alfonso-Morales, W.; Caicedo-Bravo, E.; IEEE. Mobile application for anemia detection through ocular conjunctiva images. In Proceedings of the IEEE Colombian Conference on Applications of Computational Intelligence (ColCACI), Cali, Colombia, 26–28 May 2021. [Google Scholar]
- Liu, Y.; Hong, W. Target detection based on DB-YOLO in road environment. In Proceedings of the 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 1496–1501. [Google Scholar]
- Azimjonov, J.; Ozmen, A. A real-time vehicle detection and a novel vehicle tracking systems for estimating and monitoring traffic flow on highways. Adv. Eng. Inform. 2021, 50, 101393. [Google Scholar] [CrossRef]
- Lv, X.; Lian, X.; Tan, L.; Song, Y.; Wang, C. HPMC: A multi-target tracking algorithm for the IoT. Intell. Autom. Soft Comput. 2021, 28, 513–526. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, J.; Guo, B.; Wei, Q.; Zhu, Z. An apple detection method based on Des-YOLO v4 algorithm for harvesting robots in complex environment. Math. Probl. Eng. 2021, 2021, 7351470. [Google Scholar] [CrossRef]
- Buchholz, K.; Statista. Commercial Drones Are Taking Off. 2019. Available online: https://www.statista.com/chart/17201/commecial-drones-projected-growth/ (accessed on 1 February 2023).
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Li, C.; Li, L.; Jiang, H.; Weng, K.; Geng, Y.; Li, L.; Ke, Z.; Li, Q.; Cheng, M.; Nie, W.; et al. YOLOv6: A single-stage object detection framework for industrial applications. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Sahin, O.; Ozer, S. YOLODrone: Improved YOLO architecture for object detection in drone images. In Proceedings of the 44th International Conference on Telecommunications and Signal Processing (TSP), Brno, Czech Republic, 26–28 July 2021; pp. 361–365. [Google Scholar]
- Tan, L.; Lv, X.; Lian, X.; Wang, G. YOLOv4_Drone: UAV image target detection based on an improved YOLOv4 algorithm. Comput. Electr. Eng. 2021, 93, 107261. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, X.; Cao, G.; Yang, Y.; Jiao, L.; Liu, F.; Soc, I.C. ViT-YOLO: Transformer-based YOLO for object detection. In Proceedings of the 18th IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; pp. 2799–2808. [Google Scholar]
- Koay, H.V.; Chuah, J.H.; Chow, C.-O.; Chang, Y.-L.; Yong, K.K. YOLO-RTUAV: Towards real-time vehicle detection through aerial images with low-cost edge devices. Remote Sens. 2021, 13, 4196. [Google Scholar] [CrossRef]
- Wang, P.; Wu, L.; Qi, J.; Dai, J. Unmanned aerial vehicles object detection based on image haze removal under sea fog conditions. IET Image Process. 2022, 16, 2709–2721. [Google Scholar]
- Yang, F.; Zhang, X.; Liu, B. Video object tracking based on YOLOv7 and DeepSORT. arXiv 2022, arXiv:2207.12202. [Google Scholar]
- Lin, Y.; Chen, T.; Liu, S.; Cai, Y.; Shi, H.; Zheng, D.; Lan, Y.; Yue, X.; Zhang, L. Quick and accurate monitoring peanut seedlings emergence rate through UAV video and deep learning. Comput. Electron. Agric. 2022, 197, 106938. [Google Scholar] [CrossRef]
- Khang, N.; Nhut, T.H.; Phat, C.N.; Khanh-Duy, N.; Nguyen, D.V.; Nguyen, T.V. Detecting objects from space: An evaluation of deep-learning modern approaches. Electronics 2020, 9, 583. [Google Scholar]
- Ammar, A.; Koubaa, A.; Benjdira, B. Deep-learning-based automated palm tree counting and geolocation in large farms from aerial geotagged images. Agronomy 2021, 11, 1458. [Google Scholar] [CrossRef]
- Jiang, S.; Luo, B.; Liu, J.; Zhang, Y.; Zhang, L. UAV-based vehicle detection by multi-source images. In Proceedings of the 2nd CCF Chinese Conference on Computer Vision (CCCV), China Comp Federat, Tianjin, China, 12–14 October 2017. [Google Scholar]
- Xu, Z.; Shi, H.; Li, N.; Xiang, C.; Zhou, H. Vehicle detection under UAV based on optimal dense YOLO method. In Proceedings of the 5th International Conference on Systems and Informatics (ICSAI), Nanjing, China, 10–12 November 2018; pp. 407–411. [Google Scholar]
- Ruan, W.; Wang, H.; Kou, Z.; Su, Z.; IEEE. Drogue detection and location for UAV autonomous aerial refueling based on deep learning and vision. In Proceedings of the IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018. [Google Scholar]
- Yang, Z.; Huang, Z.; Yang, Y.; Yang, F.; Yin, Z. Accurate specified-pedestrian tracking from unmanned aerial vehicles. In Proceedings of the 18th IEEE International Conference on Communication Technology (IEEE ICCT), Chongqing, China, 8–11 October 2018; pp. 1256–1260. [Google Scholar]
- Zhang, D.; Shao, Y.; Mei, Y.; Chu, H.; Zhang, X.; Zhan, H.; Rao, Y. Using YOLO-based pedestrian detection for monitoring UAV. In Proceedings of the 10th International Conference on Graphics and Image Processing (ICGIP), Chengdu, China, 12–14 December 2018. [Google Scholar]
- Alam, M.S.; Natesha, B.V.; Ashwin, T.S.; Guddeti, R.M.R. UAV based cost-effective real-time abnormal event detection using edge computing. Multimed. Tools Appl. 2019, 78, 35119–35134. [Google Scholar] [CrossRef]
- Dimithe, C.O.B.; Reid, C.; Samata, B. Offboard machine learning through edge computing for robotic applications. In Proceedings of the IEEE SoutheastCon Conference, St Petersburg, FL, USA, 19–22 April 2018. [Google Scholar]
- Cao, M.; Chen, W.; Li, Y. Research on detection and tracking technology of quad-rotor aircraft based on open source flight control. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 6509–6514. [Google Scholar]
- Doukhi, O.; Hossain, S.; Lee, D.-J. Real-time deep learning for moving target detection and tracking using unmanned aerial vehicle. J. Inst. Control. Robot. Syst. 2020, 26, 295–301. [Google Scholar] [CrossRef]
- Afifi, M.; Ali, Y.; Amer, K.; Shaker, M.; Elhelw, M. Robust real-time pedestrian detection on embedded devices. In Proceedings of the 13th International Conference on Machine Vision, Rome, Italy, 2–6 November 2020. [Google Scholar]
- Zhao, L.; Zhang, Q.; Peng, B.; Liu, Y. Faster object detector for drone-captured images. J. Electron. Imaging 2022, 31, 043033. [Google Scholar] [CrossRef]
- Zheng, A.; Fu, Y.; Dong, M.; Du, X.; Chen, Y.; Huang, J. interface identification of automatic verification system based on deep learning. In Proceedings of the 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 1–4 August 2021; pp. 46–49. [Google Scholar]
- Ohta, H.; Sato, Y.; Mori, T.; Takaya, K.; Kroumov, V. Image acquisition of power line transmission towers using UAV and deep learning technique for insulators localization and recognition. In Proceedings of the 23rd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 9–11 October 2019; pp. 125–130. [Google Scholar]
- Han, Q.; Liu, X.; Xu, J. Detection and location of steel structure surface cracks based on unmanned aerial vehicle images. J. Build. Eng. 2022, 50, 104098. [Google Scholar] [CrossRef]
- Cintas, E.; Ozyer, B.; Simsek, E. Vision-based moving UAV tracking by another UAV on low-cost hardware and a new ground control station. IEEE Access 2020, 8, 194601–194611. [Google Scholar] [CrossRef]
- Li, C.; Zheng, D.; Liu, L.; Zheng, X. A UAV-based machine vision algorithm for industrial gauge detecting and display reading. In Proceedings of the 5th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Singapore, 17–19 July 2020; pp. 109–115. [Google Scholar]
- Starzynski, J.; Zawadzki, P.; Haranczyk, D. Machine learning in solar plants inspection automation. Energies 2022, 15, 5966. [Google Scholar] [CrossRef]
- Kim, J.S.; Young, H.I. Analysis of building object detection based on the YOLO neural network using UAV images. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2021, 39, 381–392. [Google Scholar]
- Zhang, S.; Chen, B.; Wang, R.; Wang, J.; Zhong, L.; Gao, B. Unmanned Aerial Vehicle (UAV) vision-based detection of power line poles by CPU-based deep learning method. In Proceedings of the 9th IEEE Annual International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (IEEE-CYBER), Suzhou, China, 29 July–2 August 2019; pp. 1630–1634. [Google Scholar]
- Sadykova, D.; Pernebayeva, D.; Bagheri, M.; James, A. IN-YOLO: Real-time detection of outdoor high voltage insulators using UAV imaging. IEEE Trans. Power Deliv. 2020, 35, 1599–1601. [Google Scholar] [CrossRef]
- Chen, H.; He, Z.; Shi, B.; Zhong, T. Research on recognition method of electrical components based on YOLO V3. IEEE Access 2019, 7, 157818–157829. [Google Scholar] [CrossRef]
- Chen, B.; Miao, X. Distribution line pole detection and counting based on YOLO using UAV inspection line video. J. Electr. Eng. Technol. 2020, 15, 997. [Google Scholar] [CrossRef]
- Mo, Y.; Xie, R.; Pan, Q.; Zhang, B. Automatic power transmission towers detection based on the deep learning algorithm. In Proceedings of the 2nd International Conference on Computer Engineering and Intelligent Control (ICCEIC), Chongqing, China, 12–14 November 2021; pp. 11–15. [Google Scholar]
- Zhang, Z.; He, G. Recognition of bird nests on power transmission lines in aerial images based on improved YOLOv4. Front. Energy Res. 2022, 10, 435. [Google Scholar] [CrossRef]
- Zheng, H.; Ping, Y.; Cui, Y.; Li, J. Intelligent diagnosis method of power equipment faults based on single-stage infrared image target detection. IEEJ Trans. Electr. Electron. Eng. 2022, 17, 1706–1716. [Google Scholar] [CrossRef]
- Bao, W.; Ren, Y.; Wang, N.; Hu, G.; Yang, X. Detection of abnormal vibration dampers on transmission lines in UAV remote sensing images with PMA-YOLO. Remote Sens. 2021, 13, 4134. [Google Scholar] [CrossRef]
- Alsanad, H.R.; Sadik, A.Z.; Ucan, O.N.; Ilyas, M.; Bayat, O. YOLO-V3 based real-time drone detection algorithm. Multimed. Tools Appl. 2022, 81, 26185–26198. [Google Scholar] [CrossRef]
- Hu, Y.; Wu, X.; Zheng, G.; Liu, X. Object detection of UAV for anti-UAV based on improved YOLO v3. In Proceedings of the 38th Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 8386–8390. [Google Scholar]
- Yuan, X.; Xia, J.; Wu, J.; Shi, J.; Deng, L. Low altitude small UAV detection based on YOLO model. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 7362–7366. [Google Scholar]
- Madasamy, K.; Shanmuganathan, V.; Kandasamy, V.; Lee, M.Y.; Thangadurai, M. OSDDY: Embedded system-based object surveillance detection system with small drone using deep YOLO. EURASIP J. Image Video Process. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Cetin, E.; Barrado, C.; Pastor, E. Improving real-time drone detection for counter-drone systems. Aeronaut. J. 2021, 125, 1871–1896. [Google Scholar] [CrossRef]
- Sousa, A.D.P.d.; Sousa, G.C.L.d.; Maués, L.M.F. Using digital image processing and Unmanned Aerial Vehicle (UAV) for identifying ceramic cladding detachment in building facades. Ambiente Construído 2022, 22, 199–213. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, S.; Song, W.; Yang, Y. A comparative study of small object detection algorithms. In Proceedings of the 38th Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 8507–8512. [Google Scholar]
- Han, J.; Yang, Z.; Xu, H.; Hu, G.; Zhang, C.; Li, H.; Lai, S.; Zeng, H. Search like an eagle: A cascaded model for insulator missing faults detection in aerial images. Energies 2020, 13, 713. [Google Scholar] [CrossRef]
- Yan, J.; Hao, Y. Recognition method of electrical components based on improved YOLOv3. In Proceedings of the 2nd International Conference on Artificial Intelligence and Information Systems (ICAIIS), Chongqing, China, 28–30 May 2021. [Google Scholar]
- Liu, C.; Wu, Y.; Liu, J.; Sun, Z. Improved YOLOv3 network for insulator detection in aerial images with diverse background interference. Electronics 2021, 10, 771. [Google Scholar] [CrossRef]
- Kumar, P.; Batchu, S.; Swamy, S.N.; Kota, S.R. Real-time concrete damage detection using deep learning for high rise structures. IEEE Access 2021, 9, 112312–112331. [Google Scholar] [CrossRef]
- Tu, R.; Zhu, Z.; Bai, Y.; Gao, M.; Ge, Z. Key parts of transmission line detection using improved YOLO v3. Int. Arab J. Inf. Technol. 2021, 18, 747–754. [Google Scholar]
- Ding, C.; Lu, L.; Wang, C.; Ding, C. Design, sensing, and control of a novel UAV platform for aerial drilling and screwing. IEEE Robot. Autom. Lett. 2021, 6, 3176–3183. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, Z.; Wang, Y. Bidirection-fusion-YOLOv3: An improved method for insulator defect detection using UAV image. IEEE Trans. Instrum. Meas. 2022, 71, 1–8. [Google Scholar] [CrossRef]
- Kim-Phuong, P.; Thai-Hoc, L.; Trung-Thanh, N.; Ngoc-Long, L.; Huu-Hung, N.; Van-Phuc, H. Multi-model deep learning drone detection and tracking in complex background conditions. In Proceedings of the International Conference on Advanced Technologies for Communications (ATC), Ho Chi Minh City, Vietnam, 14–16 October 2021; pp. 189–194. [Google Scholar]
- Wang, X.; Li, W.; Guo, W.; Cao, K. SPB-YOLO: An efficient real-time detector for unmanned aerial vehicle images. In Proceedings of the 3rd International Conference on Artificial Intelligence in Information and Communication (IEEE ICAIIC), Jeju Island, South Korea, 13–16 April 2021; pp. 99–104. [Google Scholar]
- Feng, R.; Fan, C.; Li, Z.; Chen, X. Mixed road user trajectory extraction from moving aerial videos based on convolution neural network detection. IEEE Access 2020, 8, 43508–43519. [Google Scholar] [CrossRef]
- Omar, W.; Oh, Y.; Chung, J.; Lee, I. Aerial dataset integration for vehicle detection based on YOLOv4. Korean J. Remote Sensing 2021, 37, 747–761. [Google Scholar]
- Liu, X.; Zhang, Z. A Vision-based target detection, tracking, and positioning algorithm for unmanned aerial vehicle. Wirel. Commun. Mob. Comput. 2021, 2021, 1–12. [Google Scholar] [CrossRef]
- Silva, L.A.; San Blas, H.S.; Garcia, D.P.; Mendes, A.S.; Gonzalez, G.V. An architectural multi-agent system for a pavement monitoring system with pothole recognition in UAV images. Sensors 2020, 20, 6205. [Google Scholar] [CrossRef]
- Zhao, Z.; Han, J.; Song, L. YOLO-Highway: An improved highway center marking detection model for unmanned aerial vehicle autonomous flight. Math. Probl. Eng. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Ma, D.; Fang, H.; Wang, N.; Zhang, C.; Dong, J.; Hu, H. Automatic detection and counting system for pavement cracks based on PCGAN and YOLO-MF. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22166–22178. [Google Scholar] [CrossRef]
- Kim, J.M.; Sekwon, H.; Chae, J.H.; Do, M. Road crack detection based on object detection algorithm using unmanned aerial vehicle image. J. Korea Inst. Intell. Transp. Syst. 2019, 18, 155–163. [Google Scholar] [CrossRef]
- Sharma, R.; Patel, K.; Shah, S.; Aibin, M. Aerial footage analysis using computer vision for efficient detection of points of interest near railway tracks. Aerospace 2022, 9, 370. [Google Scholar] [CrossRef]
- Krump, M.; Russ, M.; Stuetz, P. Deep learning algorithms for vehicle detection on UAV platforms: First investigations on the effects of synthetic training. In Proceedings of the 6th International Conference on Modelling and Simulation for Autonomous Systems (MESAS), Palermo, Italy, 29–31 October 2019; pp. 50–70. [Google Scholar]
- Luo, X.; Tian, X.; Zhang, H.; Hou, W.; Leng, G.; Xu, W.; Jia, H.; He, X.; Wang, M.; Zhang, J. Fast automatic vehicle detection in UAV images using convolutional neural networks. Remote Sens. 2020, 12, 1994. [Google Scholar] [CrossRef]
- Hassan, S.A.; Han, S.H.; Shin, S.Y. Real-time road cracks detection based on improved deep convolutional neural network. In Proceedings of the IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), London, Canada, 3 August–1 September 2020. [Google Scholar]
- Chung, Q.M.; Le, T.D.; Dang, T.V.; Vo, N.D.; Nguyen, T.V.; Khang, N. Data augmentation analysis in vehicle detection from aerial videos. In Proceedings of the RIVF International Conference on Computing and Communication Technologies (RIVF), RMIT University. Ho Chi Minh City, Vietnam, 14–15 October 2020; pp. 367–369. [Google Scholar]
- Li, Y.; Chen, Y.; Yuan, S.; Liu, J.; Zhao, X.; Yang, Y.; Liu, Y. Vehicle detection from road image sequences for intelligent traffic scheduling. Comput. Electr. Eng. 2021, 95, 107406. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, D.; Er, M.J.; Zhuang, Y.; Hu, H. A novel vehicle tracking and speed estimation with varying UAV altitude and video resolution. Int. J. Remote Sens. 2021, 42, 4441–4466. [Google Scholar] [CrossRef]
- Rampriya, R.S.; Suganya, R.; Nathan, S.; Perumal, P.S. A comparative assessment of deep neural network models for detecting obstacles in the real time aerial railway track images. Appl. Artif. Intell. 2022, 36, 2018184. [Google Scholar] [CrossRef]
- Gupta, P.; Pareek, B.; Singal, G.; Rao, D.V. Edge device based military vehicle detection and classification from UAV. Multimed. Tools Appl. 2022, 81, 19813–19834. [Google Scholar] [CrossRef]
- Golyak, I.S.; Anfimov, D.R.; Fufurin, I.L.; Nazolin, A.L.; Bashkin, S.V.; Glushkov, V.L.; Morozov, A.N. Optical multi-band detection of unmanned aerial vehicles with YOLO v4 convolutional neural network. In Proceedings of the SPIE Future Sensing Technologies Conference, Electr Network, Online, 9–13 November 2020. [Google Scholar]
- Emiyah, C.; Nyarko, K.; Chavis, C.; Bhuyan, I. Extracting vehicle track information from unstabilized drone aerial videos using YOLOv4 common object detector and computer vision. In Proceedings of the 6th Future Technologies Conference (FTC), Electr Network, Online, 28–29 October 2021; pp. 232–239. [Google Scholar]
- Luo, X.; Wu, Y.; Zhao, L. YOLOD: A target detection method for UAV aerial imagery. Remote Sens. 2022, 14, 3240. [Google Scholar] [CrossRef]
- Feng, J.; Yi, C. Lightweight detection network for arbitrary-oriented vehicles in UAV imagery via global attentive relation and multi-path fusion. Drones 2022, 6, 108. [Google Scholar] [CrossRef]
- Chen, Z.; Cao, L.; Wang, Q. YOLOv5-based vehicle detection method for high-resolution UAV images. Mob. Inf. Syst. 2022, 2022, 1828848. [Google Scholar] [CrossRef]
- Luo, X.; Wu, Y.; Wang, F. Target detection method of UAV aerial imagery based on improved YOLOv5. Remote Sens. 2022, 14, 5063. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, Q.; Jiang, P.; Zheng, Y.; Yuan, L.; Yuan, P. LDS-YOLO: A lightweight small object detection method for dead trees from shelter forest. Comput. Electron. Agric. 2022, 198, 107035. [Google Scholar] [CrossRef]
- Sun, Z.; Ibrayim, M.; Hamdulla, A. Detection of pine wilt nematode from drone images using UAV. Sensors 2022, 22, 4704. [Google Scholar] [CrossRef]
- Wu, B.; Liang, A.; Zhang, H.; Zhu, T.; Zou, Z.; Yang, D.; Tang, W.; Li, J.; Su, J. Application of conventional UAV-based high-throughput object detection to the early diagnosis of pine wilt disease by deep learning. For. Ecol. Manag. 2021, 486, 118986. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, X. Pine wilt disease detection in UAV-CAPTURED images. Int. J. Robot. Autom. 2022, 37, 37–43. [Google Scholar] [CrossRef]
- Jintasuttisak, T.; Edirisinghe, E.; Elbattay, A. Deep neural network based date palm tree detection in drone imagery. Comput. Electron. Agric. 2022, 192, 106560. [Google Scholar] [CrossRef]
- Junos, M.H.; Khairuddin, A.S.M.; Thannirmalai, S.; Dahari, M. Automatic detection of oil palm fruits from UAV images using an improved YOLO model. Visual Comput. 2022, 38, 2341–2355. [Google Scholar] [CrossRef]
- Khan, S.; Tufail, M.; Khan, M.T.; Khan, Z.A.; Anwar, S. Deep learning-based identification system of weeds and crops in strawberry and pea fields for a precision agriculture sprayer. Precis. Agric. 2021, 22, 1711–1727. [Google Scholar] [CrossRef]
- Zhao, J.; Yan, J.; Xue, T.; Wang, S.; Qiu, X.; Yao, X.; Tian, Y.; Zhu, Y.; Cao, W.; Zhang, X. A deep learning method for oriented and small wheat spike detection (OSWSDet) in UAV images. Comput. Electron. Agric. 2022, 198, 107087. [Google Scholar] [CrossRef]
- Egi, Y.; Hajyzadeh, M.; Eyceyurt, E. Drone-computer communication based tomato generative organ counting model using YOLO V5 and deep-sort. Agriculture 2022, 12, 1920. [Google Scholar] [CrossRef]
- Xie, Y.; Jiang, J.; Bao, H.; Zhai, P.; Zhao, Y.; Zhou, X.; Jiang, G. Recognition of big mammal species in airborne thermal imaging based on YOLO V5 algorithm. Integr. Zool. 2022, 18, 333–352. [Google Scholar] [CrossRef]
- Priya, R.D.; Devisurya, V.; Anitha, N.; Kalaivaani, N.; Keerthana, P.; Kumar, E.A. Automated cattle classification and counting using hybridized mask R-CNN and YOLOv3 algorithms. In Proceedings of the 21st International Conference on Intelligent Systems Design and Applications (ISDA), World Wide Web, Electr Network, Online, 13–15 December 2021; pp. 358–367. [Google Scholar]
- Ulhaq, A.; Adams, P.; Cox, T.E.; Khan, A.; Low, T.; Paul, M. Automated detection of animals in low-resolution airborne thermal imagery. Remote Sens. 2021, 13, 3276. [Google Scholar] [CrossRef]
- Petso, T.; Jamisola, R.S., Jr.; Mpoeleng, D.; Bennitt, E.; Mmereki, W. Automatic animal identification from drone camera based on point pattern analysis of herd behaviour. Ecol. Inform. 2021, 66, 101485. [Google Scholar] [CrossRef]
- Guzel, M.; Sin, B.; Turan, B.; Kadioglu, I. Real-time detection of wild mustard (Sinapis arvensis L.) with deep learning (YOLO-v3). Fresenius Environ. Bull. 2021, 30, 12197–12203. [Google Scholar]
- Hashim, W.; Eng, L.S.; Alkawsi, G.; Ismail, R.; Alkahtani, A.A.; Dzulkifly, S.; Baashar, Y.; Hussain, A. A Hybrid vegetation detection framework: Integrating vegetation indices and convolutional neural network. Symmetry 2021, 13, 2190. [Google Scholar] [CrossRef]
- Idrissi, M.; Hussain, A.; Barua, B.; Osman, A.; Abozariba, R.; Aneiba, A.; Asyhari, T. Evaluating the forest ecosystem through a semi-autonomous quadruped robot and a hexacopter UAV. Sensors 2022, 22, 5497. [Google Scholar] [CrossRef] [PubMed]
- Jemaa, H.; Bouachir, W.; Leblon, B.; Bouguila, N. Computer vision system for detecting orchard trees from UAV images. In Proceedings of the 24th ISPRS Congress on Imaging Today, Foreseeing Tomorrow, Nice, France, 6–11 June 2022; pp. 661–668. [Google Scholar]
- dos Santos, A.; Biesseck, B.J.G.; Latte, N.; Santos, I.C.d.L.; dos Santos, W.P.; Zanetti, R.; Zanuncio, J.C. Remote detection and measurement of leaf-cutting ant nests using deep learning and an unmanned aerial vehicle. Comput. Electron. Agric. 2022, 198, 107071. [Google Scholar] [CrossRef]
- Puliti, S.; Astrup, R. Automatic detection of snow breakage at single tree level using YOLOv5 applied to UAV imagery. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102946. [Google Scholar] [CrossRef]
- Chang-Jin, S. A study on pedestrians tracking using low altitude UAV. Trans. Korean Inst. Electr. Eng. P 2018, 67, 227–232. [Google Scholar]
- Barisic, A.; Car, M.; Bogdan, S. Vision-based system for a real-time detection and following of UAV. In Proceedings of the International Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), Cranfield University, Cranfield, UK, 25–27 November 2019; pp. 156–159. [Google Scholar]
- Li, J.-M.; Chen, C.W.; Cheng, T.-H. Estimation and tracking of a moving target by unmanned aerial vehicles. In Proceedings of the American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 3944–3949. [Google Scholar]
- Huang, Z.-Y.; Lai, Y.-C. Image-based sense and avoid of small scale UAV using deep learning approach. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 545–550. [Google Scholar]
- Jin, C.-J.; Shi, X.; Hui, T.; Li, D.; Ma, K. The automatic detection of pedestrians under the high-density conditions by deep learning techniques. J. Adv. Transp. 2021, 2021, 1–11. [Google Scholar] [CrossRef]
- Zhang, X.; Li, N.; Zhang, R. An improved lightweight network MobileNetv3 Based YOLOv3 for pedestrian detection. In Proceedings of the IEEE International Conference on Consumer Electronics and Computer Engineering (ICCECE), Guangzhou, China, 15–17 January 2021; pp. 114–118. [Google Scholar]
- Boudjit, K.; Ramzan, N. Human detection based on deep learning YOLO-v2 for real-time UAV applications. J. Exp. Theor. Artif. Intell. 2022, 34, 527–544. [Google Scholar] [CrossRef]
- Shao, Y.; Zhang, X.; Chu, H.; Zhang, X.; Zhang, D.; Rao, Y. AIR-YOLOv3: Aerial Infrared Pedestrian Detection via an Improved YOLOv3 with Network Pruning. Appl. Sci. 2022, 12, 3627. [Google Scholar] [CrossRef]
- Kainz, O.; Gera, M.; Michalko, M.; Jakab, F. Experimental solution for estimating pedestrian locations from UAV imagery. Appl. Sci. 2022, 12, 9485. [Google Scholar] [CrossRef]
- Kraft, M.; Piechocki, M.; Ptak, B.; Walas, K. Autonomous, onboard vision-based trash and litter detection in low altitude aerial images collected by an unmanned aerial vehicle. Remote Sens. 2021, 13, 965. [Google Scholar] [CrossRef]
- Liao, Y.-H.; Juang, J.-G. Real-time UAV trash monitoring system. Appl. Sci. 2022, 12, 1838. [Google Scholar] [CrossRef]
- Liu, M.; Wang, X.; Zhou, A.; Fu, X.; Ma, Y.; Piao, C. UAV-YOLO: Small object detection on unmanned aerial vehicle perspective. Sensors 2020, 20, 2238. [Google Scholar] [CrossRef]
- Wang, L.; Ai, J.; Zhang, L.; Xing, Z. Design of airport obstacle-free zone monitoring UAV system based on computer vision. Sensors 2020, 20, 2475. [Google Scholar] [CrossRef] [PubMed]
- Kong, H.; Chen, Z.; Yue, W.; Ni, K. Improved YOLOv4 for pedestrian detection and counting in UAV images. Comput. Intell. Neurosci. 2022, 2022, 6106853. [Google Scholar] [CrossRef] [PubMed]
- Maharjan, N.; Miyazaki, H.; Pati, B.M.; Dailey, M.N.; Shrestha, S.; Nakamura, T. Detection of river plastic using UAV sensor data and deep learning. Remote Sens. 2022, 14, 3049. [Google Scholar] [CrossRef]
- Wyder, P.M.; Chen, Y.-S.; Lasrado, A.J.; Pelles, R.J.; Kwiatkowski, R.; Comas, E.O.A.; Kennedy, R.; Mangla, A.; Huang, Z.; Hu, X.; et al. Autonomous drone hunter operating by deep learning and all-onboard computations in GPS-denied environments. PLoS ONE 2019, 14, e0225092. [Google Scholar] [CrossRef]
- Quan, A.; Herrmann, C.; Soliman, H. Project Vulture: A prototype for using drones in search and rescue operations. In Proceedings of the 15th Annual International Conference on Distributed Computing in Sensor Systems (DCOSS), Athens, Greece, 29–31 May 2019; pp. 619–624. [Google Scholar]
- Kashihara, S.; Wicaksono, M.A.; Fall, D.; Niswar, M. Supportive information to find victims from aerial video in search and rescue operation. In Proceedings of the IEEE International Conference on Internet of Things and Intelligence System (IoTaIS), Bali, Indonesia, 5–7 November 2019; pp. 56–61. [Google Scholar]
- Sambolek, S.; Ivasic-Kos, M. Automatic person detection in search and rescue operations using deep CNN detectors. IEEE Access 2021, 9, 37905–37922. [Google Scholar] [CrossRef]
- Arnold, R.; Abruzzo, B.; Korpela, C. Towards a heterogeneous swarm for object classification. In Proceedings of the IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 15–19 July 2019; pp. 139–147. [Google Scholar]
- Jing, Y.; Ren, Y.; Liu, Y.; Wang, D.; Yu, L. Automatic extraction of damaged houses by earthquake based on improved YOLOv5: A case study in Yangbi. Remote Sens. 2022, 14, 382. [Google Scholar] [CrossRef]
- Ajmera, Y.; Singh, S.P. Autonomous UAV-based target search, tracking and following using reinforcement learning and YOLOFlow. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Khalifa University. Abu Dhabi, United Arab Emirates, 4–6 November 2020; pp. 15–20. [Google Scholar]
- Sudholz, A.; Denman, S.; Pople, A.; Brennan, M.; Amos, M.; Hamilton, G. A comparison of manual and automated detection of rusa deer (Rusa timorensis) from RPAS-derived thermal imagery. Wildl. Res. 2022, 49, 46–53. [Google Scholar] [CrossRef]
- Opromolla, R.; Inchingolo, G.; Fasano, G. Airborne visual detection and tracking of cooperative UAVs exploiting deep learning. Sensors 2019, 19, 4332. [Google Scholar] [CrossRef] [PubMed]
- Merizalde, D.; Morillo, P. Real-time social distancing detection approach using YOLO and unmanned aerial vehicles. In Proceedings of the 2nd International Conference on Smart Technologies, Systems and Applications (SmartTech-IC), Quito, Ecuador, 1–3 December 2021; pp. 114–127. [Google Scholar]
- Kim, D.; Liu, M.; Lee, S.; Kamat, V.R. Remote proximity proximity monitoring between mobile construction resources using camera-mounted UAVs. Autom. Constr. 2019, 99, 168–182. [Google Scholar] [CrossRef]
- Hong, S.-J.; Han, Y.; Kim, S.-Y.; Lee, A.-Y.; Kim, G. Application of deep-learning methods to bird detection using unmanned aerial vehicle imagery. Sensors 2019, 19, 1651. [Google Scholar] [CrossRef]
- Arola, S.; Akhloufi, M.A. Vision-based deep learning for UAVs collaboration. In Proceedings of the Conference on Unmanned Systems Technology XXI, Baltimore, MD, USA, 16–18 April 2019. [Google Scholar]
- Zheng, R.; Yang, R.; Lu, K.; Zhang, S. A search and rescue system for maritime personnel in disaster carried on unmanned aerial vehicle. In Proceedings of the 18th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Wuhan, China, 8–10 November 2019; pp. 43–47. [Google Scholar]
- Silvirianti; Shin, S.Y. UAV based search and rescue with honeybee flight behavior in forest. In Proceedings of the 5th International Conference on Mechatronics and Robotics Engineering (ICMRE), Rome, Italy, 16–19 February 2019; pp. 182–187. [Google Scholar]
- Zhang, X.; Shi, Z.; Wu, Z.; Liu, J. Sea surface ships detection method of UAV based on improved YOLOv3. In Proceedings of the 11th International Conference on Graphics and Image Processing (ICGIP), Zhejiang Gongshang University, Hangzhou, China, 12–14 October 2019. [Google Scholar]
- Medeiros, A.C.S.; Ratsamee, P.; Orlosky, J.; Uranishi, Y.; Higashida, M.; Takemura, H. UAV target-selection: 3D pointing interface system for large-scale environment. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xian, China, 30 May–5 June 2021; pp. 3963–3969. [Google Scholar]
- Sarosa, M.; Muna, N.; Rohadi, E.; IOP. Detection of natural disaster victims using You Only Look Once (YOLO). In Proceedings of the 5th Annual Applied Science and Engineering Conference (AASEC), Bandung, Indonesia, 20–21 April 2020. [Google Scholar]
- Rizk, M.; Slim, F.; Charara, J. Toward AI-Assisted UAV for human detection in search and rescue missions. In Proceedings of the International Conference on Decision Aid Sciences and Application (DASA), Sakheer, Bahrain, 7–8 December 2021. [Google Scholar]
- Qi, D.; Li, Z.; Ren, B.; Lei, P.; Yang, X. Detection and tracking of a moving target for UAV based on machine vision. In Proceedings of the 7th International Conference on Control, Automation and Robotics (ICCAR), Singapore, 23–26 April 2021; pp. 173–178. [Google Scholar]
- Panigrahi, S.; Maski, P.; Thondiyath, A. Deep learning based real-time biodiversity analysis using aerial vehicles. In Proceedings of the 9th International Conference on Robot Intelligence Technology and Applications (RiTA), KAIST, Daejeon, South Korea, 16–17 December 2021; pp. 401–412. [Google Scholar]
- Wang, Z.; Zhang, X.; Li, J.; Luan, K. A YOLO-based target detection model for offshore unmanned aerial vehicle data. Sustainability 2021, 13, 12980. [Google Scholar] [CrossRef]
- Tanwar, S.; Gupta, R.; Patel, M.M.; Shukla, A.; Sharma, G.; Davidson, I.E. Blockchain and AI-empowered social distancing scheme to combat COVID-19 situations. IEEE Access 2021, 9, 129830–129840. [Google Scholar] [CrossRef]
- Gromada, K.; Siemiatkowska, B.; Stecz, W.; Plochocki, K.; Wozniak, K. Real-time object detection and classification by UAV equipped with SAR. Sensors 2022, 22, 2068. [Google Scholar] [CrossRef]
- Bahhar, C.; Ksibi, A.; Ayadi, M.; Jamjoom, M.M.; Ullah, Z.; Soufiene, B.O.; Sakli, H. Wildfire and Smoke Detection Using Staged YOLO Model and Ensemble CNN. Electronics 2023, 12, 228. [Google Scholar] [CrossRef]
- Narayanan, P.; Borel-Donohue, C.; Lee, H.; Kwon, H.; Rao, R. A real-time object detection framework for aerial imagery using deep neural networks and synthetic training images. In Proceedings of the Conference on Signal Processing, Sensor/Information Fusion, and Target Recognition XXVII, Orlando, FL, USA, 16–19 April 2018. [Google Scholar]
- Borel-Donohue, C.; Young, S.S. Image quality and super resolution effects on object recognition using deep neural networks. In Proceedings of the Conference on Artificial Intelligence and Machine Learning for Multi-Domain Operations Applications, Baltimore, MD, USA, 15–17 April 2019. [Google Scholar]
- Krump, M.; Stuetz, P. UAV based vehicle detection with synthetic training: Identification of performance factors using image descriptors and machine learning. In Proceedings of the 7th International Conference on Modelling and Simulation for Autonomous Systems (MESAS), Prague, Czech Republic, 21 October 2020; pp. 62–85. [Google Scholar]
- Laurito, G.; Fraser, B.; Rosser, K. Airborne localisation of small UAS using visual detection: A field experiment. In Proceedings of the IEEE Symposium Series on Computational Intelligence (SSCI), Canberra, Australia, 1–4 December 2020; pp. 1435–1443. [Google Scholar]
- Xing, C.; Liang, X.; Yang, R. Compact one-stage object detection network. In Proceedings of the 8th IEEE International Conference on Computer Science and Network Technology (ICCSNT), Dalian, China, 20–22 November 2020; pp. 115–118. [Google Scholar]
- Zhang, J.; Wang, P.; Zhao, Z.; Su, F. Pruned-YOLO: Learning efficient object detector using model pruning. In Proceedings of the 30th International Conference on Artificial Neural Networks (ICANN), Bratislava, Slovakia, 14–17 September 2021; pp. 34–45. [Google Scholar]
- Wan, X.; Yu, J.; Tan, H.; Wang, J. LAG: Layered objects to generate better anchors for object detection in aerial images. Sensors 2022, 22, 3891. [Google Scholar] [CrossRef] [PubMed]
- Shen, X.; Shi, G.; Ren, H.; Zhang, W. Biomimetic vision for zoom object detection based on improved vertical grid number YOLO algorithm. Front. Bioeng. Biotechnol. 2022, 10, 847. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Ren, H.; Ye, X.; Zhu, J.; Zeng, H.; Nan, Y.; Sun, M.; Ren, X.; Huo, H. Object detection from UAV thermal infrared images and videos using YOLO models. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102912. [Google Scholar] [CrossRef]
- Jawaharlalnehru, A.; Sambandham, T.; Sekar, V.; Ravikumar, D.; Loganathan, V.; Kannadasan, R.; Khan, A.A.; Wechtaisong, C.; Haq, M.A.; Alhussen, A.; et al. Target object detection from Unmanned Aerial Vehicle (UAV) images based on improved YOLO algorithm. Electronics 2022, 11, 2343. [Google Scholar] [CrossRef]
- Liu, X.; Wu, J. Finetuned YOLOv3 for getting four times the detection speed. In Proceedings of the 14th International Conference on Knowledge Science, Engineering, and Management (KSEM), Tokyo, Japan, 14–16 August 2021; pp. 512–521. [Google Scholar]
- Zhang, T.; Hu, X.; Xiao, J.; Zhang, G. A Machine learning method for vision-based unmanned aerial vehicle systems to understand unknown environments. Sensors 2020, 20, 3245. [Google Scholar] [CrossRef]
- Qin, Z.; Wang, W.; Dammer, K.-H.; Guo, L.; Cao, Z. Ag-YOLO: A real-time low-cost detector for precise spraying with case study of palms. Front. Plant Sci. 2021, 12, 2974. [Google Scholar] [CrossRef]
- Ho, M.J. Development of small multi-copter system for indoor collision avoidance flight. J. Aerosp. Syst. Eng. 2021, 15, 102–110. [Google Scholar]
- Xing, Z.; Zhang, L.; Ai, J. Research of key technologies for multi-rotor UAV automatic aerial recovery system. Electron. Lett. 2022, 58, 277–279. [Google Scholar] [CrossRef]
- Nepal, U.; Eslamiat, H. Comparing YOLOv3, YOLOv4 and YOLOv5 for autonomous landing spot detection in faulty UAVs. Sensors 2022, 22, 464. [Google Scholar] [CrossRef]
- Lalak, M.; Wierzbicki, D. Automated detection of atypical aviation obstacles from UAV images using a YOLO algorithm. Sensors 2022, 22, 6611. [Google Scholar] [CrossRef]
- Lu, M.; Chen, H.; Lu, P. Perception and avoidance of multiple small fast moving objects for quadrotors with only low-cost RGBD camera. IEEE Robot. Autom. Lett. 2022, 7, 11657–11664. [Google Scholar] [CrossRef]
- Wang, C.-N.; Yang, F.-C.; Vo, N.T.M.; Nguyen, V.T.T. Wireless communications for data security: Efficiency assessment of cybersecurity industry—A promising application for UAVs. Drones 2022, 6, 363. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Research Fields | No. | Research Fields | No. | Research Fields | No. | Research Fields |
|---|---|---|---|---|---|---|---|
| 1 | Engineering | 12 | Transportation | 23 | Plant Sciences | 34 | Architecture |
| 2 | Computer Science | 13 | Optics | 24 | Forestry | 35 | Behavioral Sciences |
| 3 | Automation Control Systems | 14 | Physical Sciences Other Topics | 25 | Physical Geography | 36 | Biodiversity Conservation |
| 4 | Communication | 15 | Geology | 26 | Spectroscopy | 37 | Geography |
| 5 | Instruments Instrumentation | 16 | Environmental Sciences Ecology | 27 | Geochemistry Geophysics | 38 | Neurosciences Neurology |
| 6 | Robotics | 17 | Energy Fuels | 28 | Materials Science | 39 | Parasitology |
| 7 | Business Economics | 18 | Construction Building Technology | 29 | Operations Research Management Science | 40 | Radiology Nuclear Medicine Medical Imaging |
| 8 | Mathematics | 19 | Agriculture | 30 | Zoology | 41 | Mechanics |
| 9 | Imaging Science Photographic Technology | 20 | Mathematical Computational Biology | 31 | Science Technology Other Topics | ||
| 10 | Telecommunications | 21 | Physics | 32 | Remote Sensing | ||
| 11 | Chemistry | 22 | Acoustics | 33 | Fisheries |
| YOLO Models | Reference | Object | Metric | Paper Type | Sensors | Purpose |
|---|---|---|---|---|---|---|
| YOLOv2 | Sousa et al. (2022) [63] | Ceramic detachment | Precision 99%, Recall 98% | Journal | Cameras | Building surface inspection |
| YOLOv3 | Wang et al. (2019) [64] | Small objects | Accuracy 85% | Conference paper | Cameras | Algorithmic research |
| Han et al. (2020) [65] | Insulators | Precision 92.1%, Recall 92.2% | Journal | Cameras | Transmission line inspection | |
| Yan et al. (2021) [66] | Electrical components | N/A | Conference paper | Cameras | Transmission line inspection | |
| Liu et al. (2021) [67] | Insulators | Precision 94%, Recall 96% | Journal | Cameras | Transmission line inspection | |
| Kumar et al. (2021) [68] | Concrete damage | Accuracy 94.24% | Journal | Cameras | Building surface inspection | |
| Tu et al. (2021) [69] | Power towers and Insulators | Accuracy 88% | Journal | Cameras | Transmission line inspection | |
| Ding Lu et al. (2021) [70] | Holes and bolts | N/A | Journal | Cameras | Aerial manipulation platform | |
| Yang et al. (2022) [71] | Insulators | mAP 94% | Journal | Cameras | Transmission line inspection | |
| YOLOv4 | Kim-Phuong et al. (2021) [72] | UAVs | Accuracy 87.37% | Conference paper | Cameras | Moving target tracking |
| YOLOv5 | Wang et al. (2021) [73] | Small objects | mAP 81.1% | Conference paper | Cameras | Algorithmic research |
| YOLO Models | Reference | Object | Metric | Paper Type | Sensors | Purpose |
|---|---|---|---|---|---|---|
| YOLOv2 | Kim et al. (2019) [80] | Road cracks | mAP 33% | Journal | Cameras | Road safety inspection |
| Sharma et al. (2022) [81] | Railway tracks | Precision 74%, Accuracy 85%, mAP 70.7% | Journal | Cameras | Road safety inspection | |
| YOLOv3 | Krump et al. (2019) [82] | Vehicles | mAP 64.4% | Conference paper | Cameras | Algorithmic research |
| Luo et al. (2020) [83] | Vehicles | mAP 97.49% | Journal | Cameras | Algorithmic research | |
| Hassan et al. (2020) [84] | Road cracks | Accuracy 92%, mAP 90% | Conference paper | Cameras | Road safety inspection | |
| Chung et al. (2020) [85] | Vehicles | mAP 35.08% | Conference paper | Cameras | Algorithmic research | |
| Li et al. (2021) [86] | Vehicles | N/A | Journal | Cameras | Traffic Management | |
| Chen et al. (2021) [87] | Vehicles | mAP 50.05% | Journal | Cameras | Vehicle tracking and speed estimation | |
| Rampriya et al. (2022) [88] | Obstacles on the railway track | Precision 70.68%, Accuracy 70.83%, Recall 73.64% | Journal | Cameras | Road safety inspection | |
| Gupta et al. (2022) [89] | Military vehicles | N/A | Journal | Cameras | Military vehicle detection and classification | |
| YOLOv4 | Golyak et al. (2020) [90] | Vehicles | N/A | Conference paper | Cameras, Thermal imager | Detection of unmanned vehicles |
| Emiyah et al. (2021) [91] | Vehicles | N/A | Conference paper | Cameras | Vehicle detection and counting | |
| Luo et al. (2022) [92] | Vehicles | mAP 71.97% | Journal | Cameras | Algorithmic research | |
| YOLOv5 | Feng and Yi (2022) [93] | Vehicles | mAP 89.74% | Journal | Cameras | Traffic Management |
| Chen et al. (2022) [94] | Vehicles | Precision 91.9%, Recall 82.5%, mAP 89.6% | Journal | Cameras | Traffic Management | |
| Luo et al. (2022) [95] | Vehicles | mAP 85.35% | Journal | Cameras | Algorithmic research |
| YOLO Models | Reference | Object | Metric | Paper Type | Sensors | Purpose |
|---|---|---|---|---|---|---|
| YOLOv3 | Priya et al. (2021) [106] | Cattle | N/A | Conference paper | Cameras | Livestock management |
| Ulhaq et al. (2021) [107] | Animals | mAP 87.1% | Journal | Thermal imager | Animal management | |
| Petso et al. (2021) [108] | Animals | F1 96% | Journal | Cameras | Wildlife monitoring | |
| Guzel et al. (2021) [109] | Wild mustard | Precision 45–99% | Journal | Cameras | Crop protection | |
| Hashim et al. (2021) [110] | Vegetation | Accuracy 84% | Journal | Multispectral camera | Hybrid Vegetation Detection | |
| YOLOv5 | Idrissi et al. (2022) [111] | Burrow, Deadwood, Pine, Grass, Oak, Wood, Fire, Pedestrian | mAP 44.3% | Journal | Cameras | Evaluating the Forest Ecosystem |
| Jemaa et al. (2022) [112] | Orchard tree | Precision 91% | Conference paper | Cameras | Orchard tree management | |
| dos Santos et al. (2022) [113] | Leaf-cutting ants | Accuracy 98.45% | Journal | Cameras | Optimizing the use of pesticides | |
| Puliti and Astrup (2022) [114] | Tree damage | Precision 76%, Recall 78% | Journal | Cameras | Evaluating the Forest Ecosystem |
| YOLO Models | Reference | Object | Metric | Paper Type | Sensors | Purpose |
|---|---|---|---|---|---|---|
| YOLOv3 | Liu et al. (2020) [126] | Small objects | mAP 72.54% | Journal | Cameras | Small object detection |
| Wang et al. (2020) [127] | UAVs | N/A | Journal | Cameras | Airport obstacle-free zone monitoring UAV system | |
| YOLOv4 | Kong et al. (2022) [128] | Pedestrian | mAP 39.32% | Journal | Cameras | Pedestrian Detection and Counting |
| YOLOv5 | Maharjan et al. (2022) [129] | River Plastic | N/A | Journal | Cameras | Plastic waste management |
| YOLO Models | Reference | Object | Metric | Paper Type | Sensors | Purpose |
|---|---|---|---|---|---|---|
| YOLOv1 | Ajmera and Singh (2020) [136] | Missing victim | N/A | Conference paper | Cameras | Urban Search and Rescue |
| Sudholz et al. (2022) [137] | Rusa deer | N/A | Journal | Cameras, Thermal imager | The detection and monitoring of invasive species | |
| YOLOv2 | Opromolla et al. (2019) [138] | UAVs | N/A | Journal | Cameras | Visual-based detection and tracking of cooperative UAVs |
| Merizalde and Morillo (2021) [139] | Pedestrian | Rcall 90% | Conference paper | Cameras | Real-time Social Distancing Detection | |
| YOLOv3 | Kim et al. (2019) [140] | Mobile construction resources | Accuracy 97.43% | Journal | Cameras | Protecting construction workers |
| Hong et al. (2019) [141] | Birds | N/A | Journal | Cameras | Wildlife monitoring | |
| Arola and Akhloufi (2019) [142] | UAVs | N/A | Conference paper | Cameras | Collaborative UAV research | |
| Zheng et al. (2019) [143] | Distress personnel | N/A | Conference paper | Cameras | A Search and Rescue System for Maritime Personnel | |
| Silvirianti et al. (2019) [144] | UAV flight behavior | Accuracy 83% | Conference paper | Cameras | Search and rescue for people in distress in the forest | |
| Zhang et al. (2019) [145] | Sea surface ships | N/A | Conference paper | Cameras | Algorithmic research | |
| Medeiros et al. (2021) [146] | Human posture | N/A | Conference paper | Cameras | Human posture guidance system | |
| Sarosa et al. (2020) [147] | Victims of natural disasters | Accuracy 89% | Conference paper | Cameras | Search and rescue for victims of natural disasters | |
| Rizk et al. (2021) [148] | Human | Accuracy 78.78% | Conference paper | Cameras | Search and rescue for victims of natural disasters | |
| Qi et al. (2021) [149] | Moving Target | N/A | Conference paper | Cameras | Moving target detection and tracking | |
| Panigrahi et al. (2021) [150] | Wildlife | mAP 95% | Conference paper | Cameras | Biodiversity analysis | |
| Wang et al. (2021) [151] | Offshore Small Targets | Precision 92.7%, Recall 92.06%, mAP 95.58% | Journal | Cameras | Algorithmic research | |
| Tanwar et al. (2021) [152] | Pedestrian | N/A | Journal | Cameras | Real-time Social Distancing Detection | |
| YOLOv5 | Gromada et al. (2022) [153] | Military targets | N/A | Journal | Cameras, Synthetic aperture radar | Algorithmic research |
| Bahhar et al. (2023) [154] | Wildfire and Smoke | mAP 85.8% | Journal | Cameras | Forest fire detection |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Zheng, Z.; Xu, T.; Guo, S.; Feng, S.; Yao, W.; Lan, Y. YOLO-Based UAV Technology: A Review of the Research and Its Applications. Drones 2023, 7, 190. https://doi.org/10.3390/drones7030190
Chen C, Zheng Z, Xu T, Guo S, Feng S, Yao W, Lan Y. YOLO-Based UAV Technology: A Review of the Research and Its Applications. Drones. 2023; 7(3):190. https://doi.org/10.3390/drones7030190
Chicago/Turabian StyleChen, Chunling, Ziyue Zheng, Tongyu Xu, Shuang Guo, Shuai Feng, Weixiang Yao, and Yubin Lan. 2023. "YOLO-Based UAV Technology: A Review of the Research and Its Applications" Drones 7, no. 3: 190. https://doi.org/10.3390/drones7030190
APA StyleChen, C., Zheng, Z., Xu, T., Guo, S., Feng, S., Yao, W., & Lan, Y. (2023). YOLO-Based UAV Technology: A Review of the Research and Its Applications. Drones, 7(3), 190. https://doi.org/10.3390/drones7030190