1. Introduction
Cracks inevitably occur in concrete structures. Various factors cause cracks, such as structural characteristics, negligence during construction, and deterioration. Neglected cracks may develop severely and impact structural stability [
1]. Cracks in a concrete structure can cause critical losses, such as structural defects, degraded durability, exterior damage, rebar corrosion, and degraded waterproofing performance. Cracks sized at approximately 0.05–0.1 mm require attention. Cracks at approximately 0.3–0.4 mm are considered defects and can develop into dangerous sizes [
2].
In Korea, concrete cracks are considered as an objective defect. To assess concrete cracks, the suitability for normal use is determined by considering general technical rules, such as construction-related laws [
3]. Article 7 (Concrete Cracks) of the Standards for the Investigation, Repair Cost Estimation, and Judgment of Defects in Apartment Housing, established by the Ministry of Land, Infrastructure, and Transport (MOLIT), defines the defects of concrete cracks. According to this law, only cracks with a width of at least 0.3 mm are classified as defects; cracks less than 0.3 mm in width are classified as defects only for cracks accompanied by leaks, cracks in the length direction of rebars where the rebars are placed, and penetrating cracks [
4]. Furthermore, Article 44 (Standards for Design and Execution of Constructions) of the Construction Technology Promotion Act and Article 65 (Design Standards of Concrete Structures (KDS 14 20 00)) of the Enforcement Decree of the Construction Technology Promotion Act, established by MOLIT, define the permissible crack widths of reinforced concrete structures as 0.4 mm and 0.3 mm in dry and wet environments, respectively [
5]. Current technical rules in Korea (e.g., laws on determining crack defects) set standards primarily for safety and durability.
Statistical data indicate that the problem of deterioration is gradually receiving more attention, owing to the lengthened service life of concrete buildings. According to statistical data from MOLIT, the percentage of aged buildings in Korea increased from 29.0% in 2005 to 39.6% in 2022 [
6]. Maintaining the function of old concrete buildings and structures is challenging because various physical and chemical factors cause them to deteriorate or corrode [
7].
Korea is incurring substantial social costs in maintaining deteriorating facilities. Thus, developing technologies for an economical and efficient building safety inspection is necessary. Safety inspections of facilities in the country are currently performed through visual inspections by experienced inspectors. Crack information is among the most important damage information obtained through visual inspections because it directly reflects structural conditions [
8]. Accordingly, damage information of facilities is regularly surveyed through visual inspections. However, conventional human-based visual inspections are time-consuming and costly. Moreover, detecting cracks accurately is difficult, and inspection results are subjective, owing to the variability in the experience and proficiency of the inspector, reducing reliability and objectivity [
9].
To address the limitations of conventional visual inspections, researchers have studied unmanned aerial vehicle (UAV)-based structural crack detection technology with efficient mobility that can be installed with various sensors. Wang et al. [
10] used the extended cascading classifier (ECC) method to detect cracks on the surface of a wind turbine based on UAV-taken images. Salaan et al. [
11] developed a passive rotating spherical shell (PRSS) UAV to detect structural cracks based on UAV-taken images and used a next-generation-robots-for-social-infrastructure (NGRSI) system. Ali Akbar et al. [
12] used a feature-detection algorithm method based on speeded-up robust features (SURFs) to detect structural cracks based on UAV-taken images. Kim et al. [
13] used a deep-learning-based region with convolutional neural networks (R-CNNs) method to identify cracks in deteriorated concrete bridges. Oh et al. [
14] used Sobel, Laplacian, and Canny algorithms and a UAV installed with an infrared camera to detect heat leakage and cracks in the exterior walls of buildings. Munawar et al. [
15] used a deep-learning-based-convolutional-neural-networks (CNNs) method to detect cracks and assess damage to civil infrastructure. They evaluated performance using five types of CNN structures: guided filtering (GF), baseline (BN), deep crack BN, deep crack GF, and SegNet. Wu et al. [
16] used a mask regional convolutional neural network (Mask-RCNN) method to detect defects, such as cracks in a water tower. In addition, active research is being conducted on the application of vision technology. Research on object detection, tracking, and localization using point cloud techniques, image stitching, and deep learning has been conducted [
17,
18,
19]. These studies demonstrated the applicability of UAVs and deep learning for crack detection.
Building structure refers to the primary parts providing structural strength to safely support the design load acting on the building [
20]. Distinguishing between structural and non-structural cracks is necessary for prioritizing repair and reinforcement activities efficiently. Structural cracks are cracks that have progressed toward or reached a stage where the structure or structural member cannot safely support the working load. Non-structural cracks are cracks that do not degrade structural safety but can degrade durability and usability [
21]. Thus, in concrete buildings, the risk level of cracks occurring in the main structure (columns, beams, load-bearing walls, slabs, roofs, etc.) differs from that of cracks occurring in other parts. Therefore, it is important to prioritize according to the risk of cracking, and repair and reinforcement work should be carried out according to the priority. However, most studies related to cracks in concrete buildings using UAV and a deep learning focus on crack detection. Studies defining cracks using structural part definition layers based on building design drawings information are insufficient. Moreover, currently developed technology has limitations in defining structural cracks that can seriously affect the stability of buildings.
Therefore, repair and reinforcement activities should be prioritized for cracks in the main structure. Most studies on cracks in concrete structures using UAV and deep learning focused on detection and location determination. Moreover, research on risk level according to the crack location is limited. This study proposes a method to define structural cracks on the outer wall of a concrete building by merging the orthoimage layer and the structural drawing layer with the UAV and deep learning that are previously applied during safety inspection. The purpose of this study is to provide a methodology for defining structural and non-structural cracks by utilizing technologies, such as information in UAV images, point cloud technology, structural analysis of design drawings, and merging layers (design drawings, orthoimages, and deep-learning-based crack detection images).
2. Proposed Method
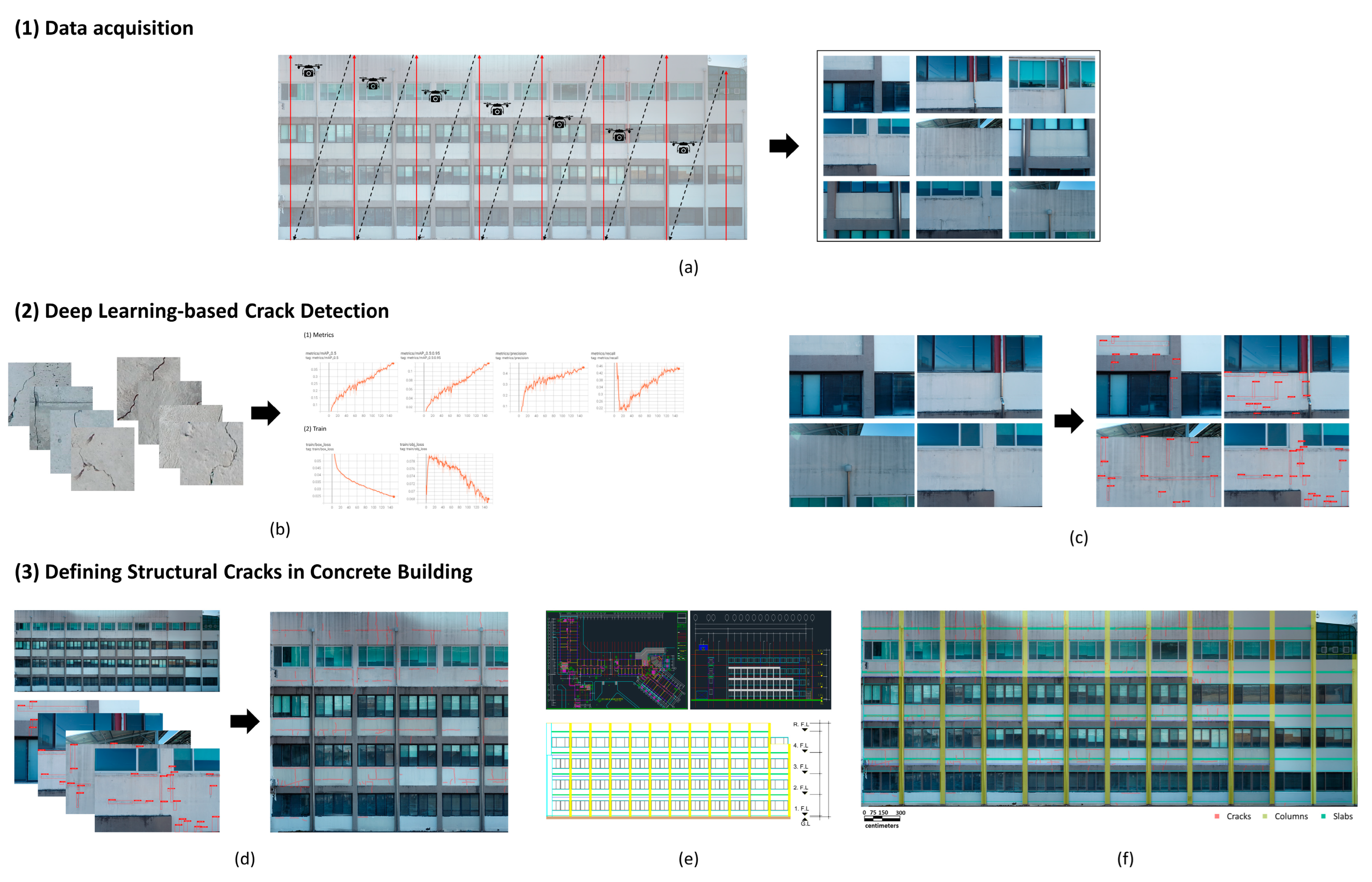
This section explains the proposed method for defining structural cracks in the exterior walls of concrete buildings using a UAV, as shown in
Figure 1. The proposed method comprises the following steps: (1) Acquire data: Drone-based aerial photography. (2) Detect cracks based on deep learning: (a) construct deep learning dataset and (b) detect cracks through deep learning. (3) Define structural cracks in the concrete building: (a) generate orthoimage based on point cloud technique and superimpose crack layer, (b) define the structure of exterior walls of the building using design drawings, and (c) define structural cracks through superimposed building crack expression data and design drawings.
2.1. Data Acquisition
When acquiring data through UAV-based aerial photography, a flight plan must be set after sufficiently considering the photography conditions. The quality of data acquired through aerial photography significantly affects deep learning and spatial information construction. Accordingly, the flight plan in this study was established considering flight safety and the quality of the photographed data.
Before starting a flight using a UAV, the pilot must identify the factors affecting the flight and safety, including the structural system of the target building, layout of the surrounding terrain and buildings, and wire locations around the target building. Subsequently, a location without factors influencing flight and safety is selected, and aerial photography is performed. In photographing the building walls with a UAV, horizontal and vertical flights are used for changing the position and altitude of the UAV, respectively. Therefore, rotary-wing UAVs, which allow for hovering flight and can freely change altitude during flight, are more suitable than fixed-wing UAVs for aerial photography. Moreover, this study required close-up photography of the target building to acquire aerial images with cracks. A skilled pilot manually flew the UAV to handle unexpected situations with collision risks.
Considering the flight stability, data quality, and overlap of the acquired images is necessary for acquiring aerial photographs. The performance of the installed camera sensor and shooting distance affect the resolution of aerial images. Jeong et al. [
22] used aerial images with a 12 MP resolution photographed from a distance of 5–10 m to detect cracks; however, the detection accuracy was low, and the range was limited. Liu et al. [
23] used a UAV to detect cracks in a facility and acquired aerial images with 20.8 MP taken at a distance of 1–2 m. Kim and Cho [
24] used a UAV for the automatic vision-based detection of cracks in concrete surfaces and acquired aerial images with a 20 MP resolution, taken at a distance of 2 m. Accordingly, this study aimed to obtain aerial images with a 20 MP resolution and set the shooting distance to 2 m considering safety.
Image overlap significantly affects spatial information construction based on the point cloud technique for defining the location of concrete cracks [
25]. To detect cracks in deteriorated bridges, Ayele et al. [
26] set the image overlap to 60–70% to construct spatial information. Zhu et al. [
27] used aerial images with a 75% image overlap to detect road cracks based on deep learning. Yuhan Jiang et al. [
28] set the image overlap to 50% to detect defects in buildings and infrastructure. Accordingly, this study set the image overlap to at least 65% for data acquisition to build spatial information and express concrete cracks.
2.2. Deep-Learning-Based Crack Detection
Detecting cracks based on deep learning involves two processes: (a) constructing a pretraining deep learning dataset and (b) detecting cracks through deep learning.
A pretraining dataset must first be constructed to detect cracks in concrete buildings based on deep learning. The quantity of data trained during dataset preparation significantly affects the model training and evaluation accuracy. This study used the SDNET2018 image dataset edited by Maguire et al. [
29] for constructing the training dataset. SDNET2018 is an annotated image dataset for training, validating, and benchmarking AI-based algorithms for concrete crack detection. This dataset contains 56,000 images of bridge decks, walls, and roads. This study built a pretraining dataset of 12,500 images, comprising 6000 images with cracks and 6000 images without cracks selected from the SDNET2018 and 500 UAV-obtained aerial images with cracks.
Subsequently, cracks in concrete buildings were detected using the YOLO V5 model, the latest object detection algorithm in the you-only-look-once (YOLO) product group. YOLO V5 is a machine learning algorithm with high processing speed and accuracy applicable for crack detection [
30].
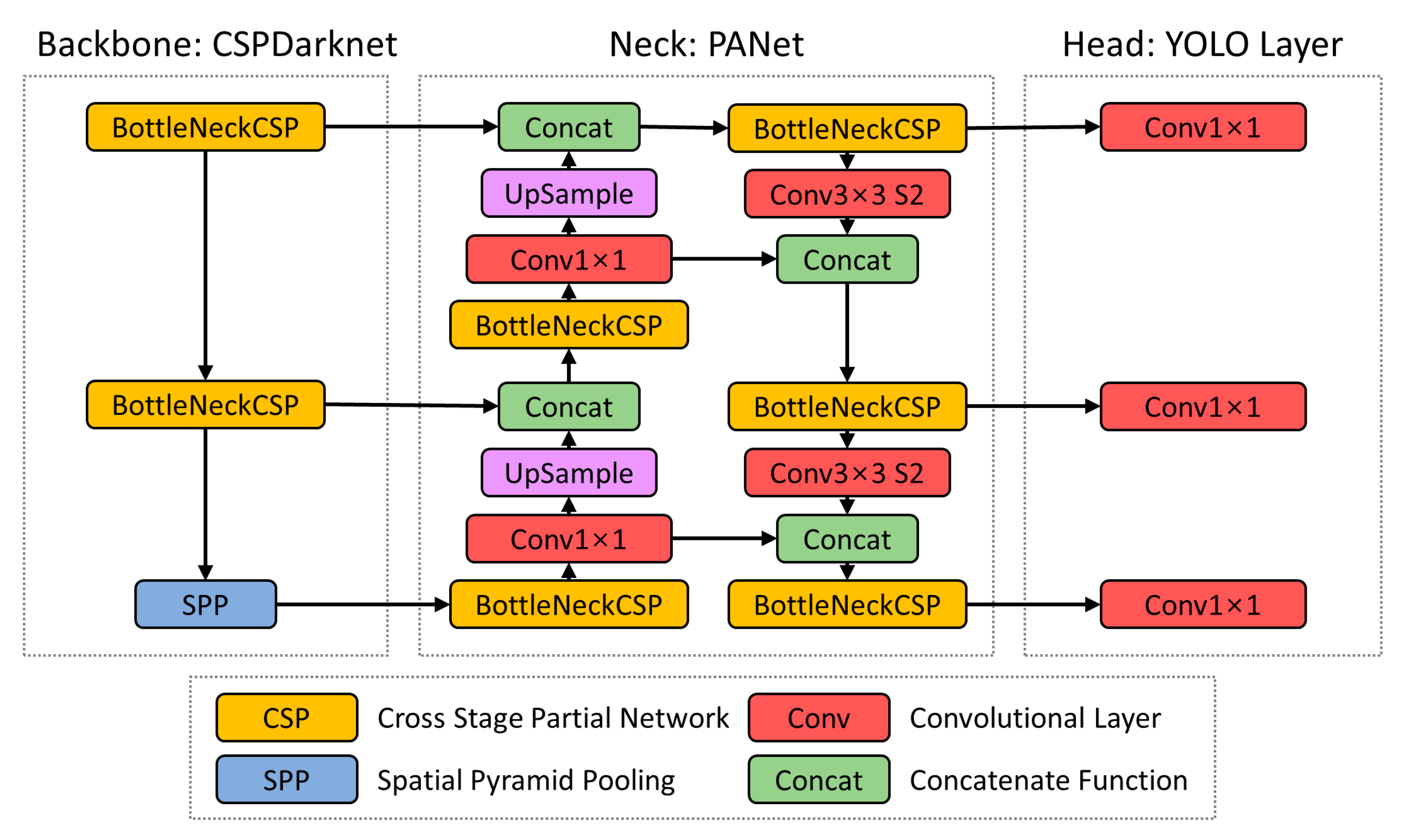
Figure 2 shows the architectural composition of YOLO V5.
The YOLO V5 architecture comprises a backbone (CSPDarknet), neck (PANet), and head (YOLO Layer), among which the backbone processes feature extraction at various levels in the cross-stage partial (CSP) network. Subsequently, BottleNeck formulates the image function and transfers it to the neck (PANet) and special pyramid pooling (SPP). The neck contains a series of connected BottleNeckCSPs and circuit networks. In the final step, the head uses a series of convolutional networks to combine the image features and process prediction boxes and their classes. The prediction box localization is based on an object-tracking algorithm that iteratively modifies the location of the bounding boxes [
31]. This process significantly increases the efficiency of the YOLO V5 algorithm and makes it usable for crack detection in buildings.
2.3. Defining Structural Cracks in Concrete Building
Defining structural cracks in concrete buildings comprises three steps: (a) generate orthoimage based on point cloud technique and superimpose crack layer, (b) define the structure of exterior walls of building using design drawings, and (c) define structural cracks through superimposed building crack expression data and design drawings.
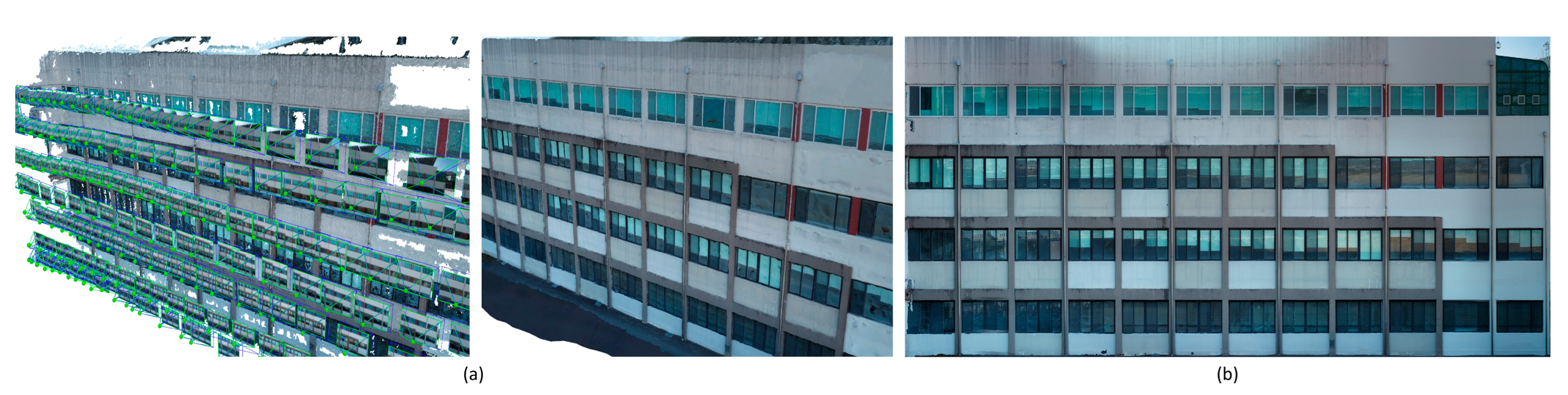
Spatial information of the UAV-acquired aerial images must first be built to generate an orthoimage to express building cracks. The point cloud technique can be applied to UAV-based aerial images to build spatial information. Spatial information construction based on the point cloud technique comprises three steps: (1) initial processing, (2) point cloud and mesh, and (3) digital surface model (DSM) and orthoimages. First, feature points are identified as key points in images, containing location information using the scale-invariant feature transform (SIFT) algorithm. Subsequently, images with the same feature points are searched and matched, and the internal and external parameters of the photographing sensor are corrected. Thereafter, a point cloud is constructed through point densification of the generated feature points. A 3D textured mesh can be generated based on the constructed point cloud. A 3D model can be established through this process. A DSM and an orthoimage can be generated based on the 3D model [
32]. In segmenting and reconstructing the aerial images in points to create the 3D model, the image quality in the orthoimage generated based on the point cloud technique deteriorates compared with the raw data [
33]. Consequently, millimeter-level crack detection is limited in orthoimages created based on the point cloud technique. In
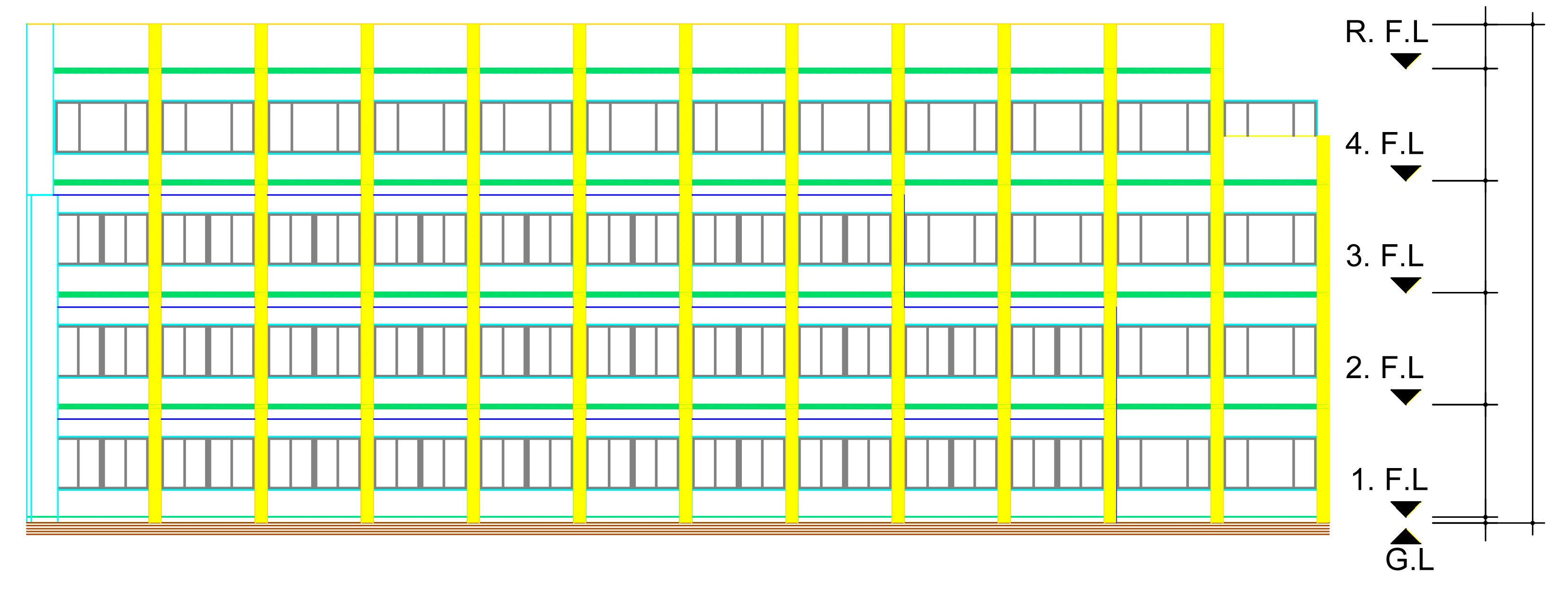
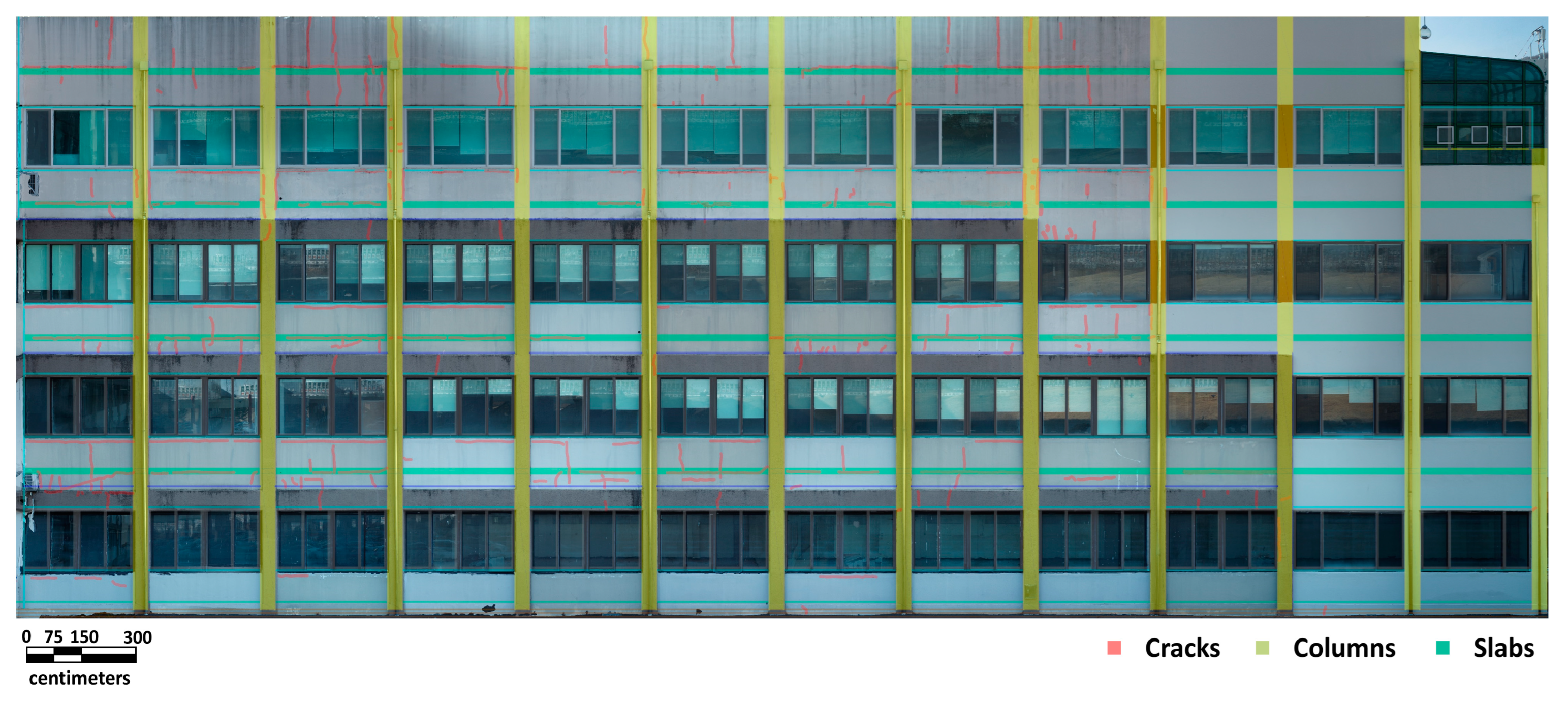
Section 2.2, the detected crack layer of the building was manually matched with the orthoimage using deep learning to construct superimposed orthoimage data expressing the building cracks. Subsequently, the structure of the exterior walls of the building was defined using design drawings. The size and position of the structural members were defined using the floor plan, elevation, sectional view, and structural drawings of the target building. Moreover, according to Article 2, Item 7 of the Korean Building Act, the main structure was defined as columns, beams, slabs, and load-bearing walls. The main structure and non-structural members were classified based on the design drawings. Subsequently, the building crack expression data were established by superimposing the elevation of the target building on the orthoimage data expressing the locations of the point-cloud-based cracks. The locations of structural cracks were defined based on these constructed building crack expression data. This study performed a comparative analysis with the location information values of cracks in real buildings using measuring equipment to verify the classified cracks.
4. Discussion
This study used a UAV and deep learning to define structural cracks in the exterior walls of a concrete building. When using UAVs for safety diagnosis, objective data can be acquired in places difficult for human access. Moreover, with deep learning, the acquired data can be analyzed objectively and accurately without human intervention. Owing to these advantages, many studies on applying deep learning and UAVs for the safety inspection of buildings and other facilities have been conducted. However, current studies focused only on detecting the occurrence of damage (e.g., Kim et al. [
34]) or estimating the crack locations (e.g., Baek et al. [
9]).
This study applied UAVs and deep learning, technologies recently gaining attention for safety inspection, to define structural cracks that can severely threaten building safety. The purpose of this study is to provide a methodology for defining structural and non-structural cracks by utilizing technologies, such as location information of UAV images, point cloud technology, structural analysis of design drawings, and merging layers (design drawings, orthoimages, and deep-learning-based crack detection images). This study is different from previous studies in that it defines structural cracks by utilizing the crack layer and orthoimage layer processed from drone images and the structure definition layer processed from building design drawings. Moreover, this study differs from previous research in that it provides a method for judging the quality and risk level of cracks. In addition, this method defines the structural and non-structural parts of the outer wall of a concrete building and expresses cracks by merging layers of design drawings, orthoimages, and deep-learning-based crack detection images. It is judged that this can be used as basic data to determine the quality and risk of cracks using UAVs. Furthermore, the proposed method is expected to greatly contribute to facility safety inspections by being able to determine the quality and risk of cracks, along with drones and deep learning that have been attracting attention during safety inspections.
However, applying the proposed method to old buildings with no design information is challenging because the structural and non-structural parts are distinguished based on design information. Many recent studies on extracting design information using drones have been conducted, such as the study of Baek et al. [
35]. A technology that defines structural and non-structural parts in the design information constructed by drones can be integrated with the proposed method to increase the utilization of drones and deep learning in safety inspections.
Another limitation is that this study only classified the risk of structural and non-structural parts based on location. Quantitatively analyzing the risk of cracks occurring in structural parts should be explored in future works. A technology that quantitatively analyzes the impact on building safety according to structural and non-structural parts and crack location can be integrated with the proposed method to increase the utilization of drones and deep learning in safety inspections.
Many studies (e.g., Muhammad Ali Akbar et al. (2019)) on detecting damage in facilities using deep learning and drone technology have been conducted [
12,
13,
14,
15]. Integrating the proposed method with damage detection technologies in the future can significantly contribute to facility safety inspections. Moreover, the proposed method can be used for judging the quality and risk level of cracks using drones.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}