


Capacity Analysis of Power Beacon-Assisted Industrial IoT System with UAV Data Collector

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Related Literature
1.2. Motivation and Contribution
- (1)
- We consider a novel system by incorporating detailed mathematical and simulation analysis. Derived analytical expressions are corroborated by an independent simulation model.
- (2)
- The novel closed-form expressions for the outage probability and outage capacity of the system are derived.
- (3)
- The analytical result for ergodic capacity is derived in the exact closed-form.
- (4)
- Based on the obtained analytical and simulation results we demonstrate the characteristics of the network for various system parameters and propagation conditions including the randomness of the UAV locations. Those results can be used as a guidance for the design of UAV data collection system in inaccessible area.
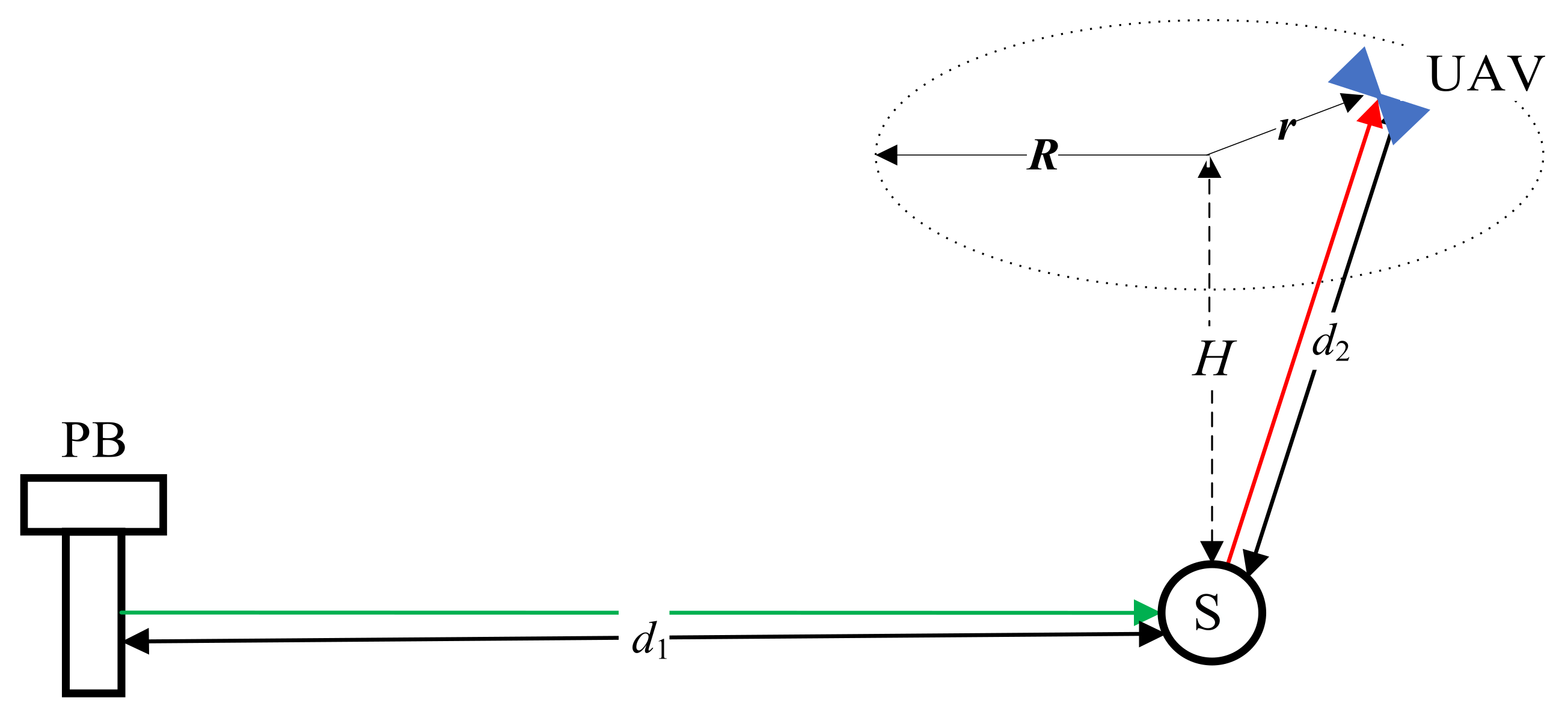
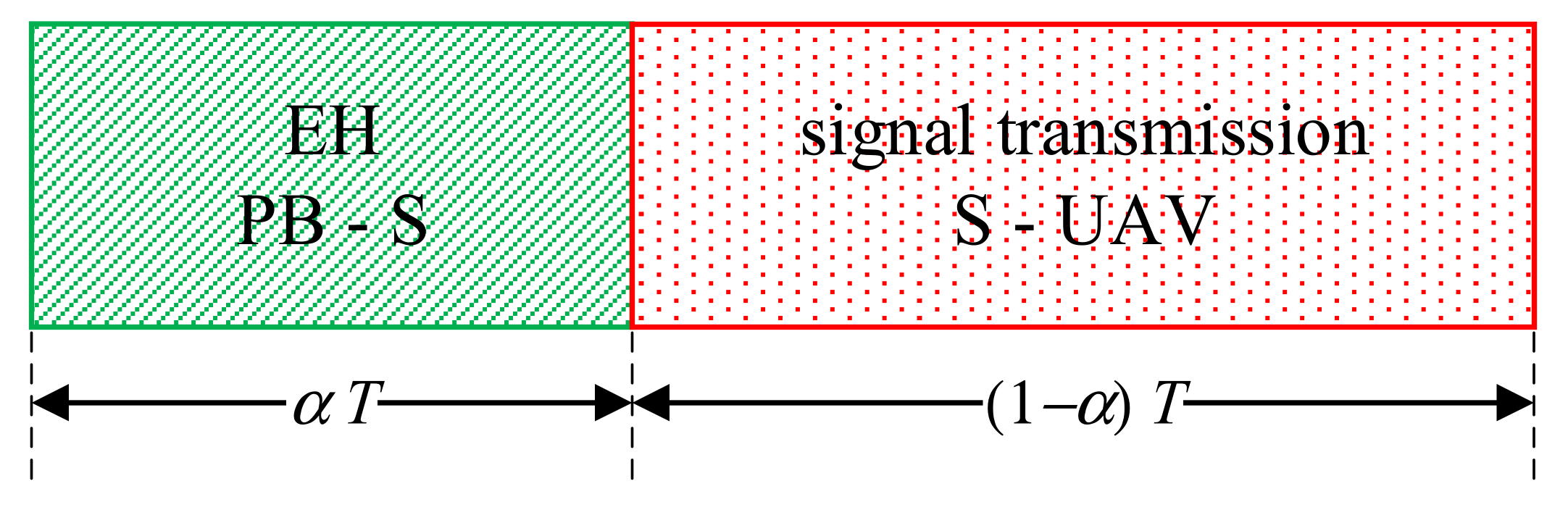
2. System and Channel Model
SNR Statistics of UAV with Random Location
3. Ergodic and Outage Capacity
3.1. Outage Capacity and Throughput
3.2. Ergodic Capacity and Throughput
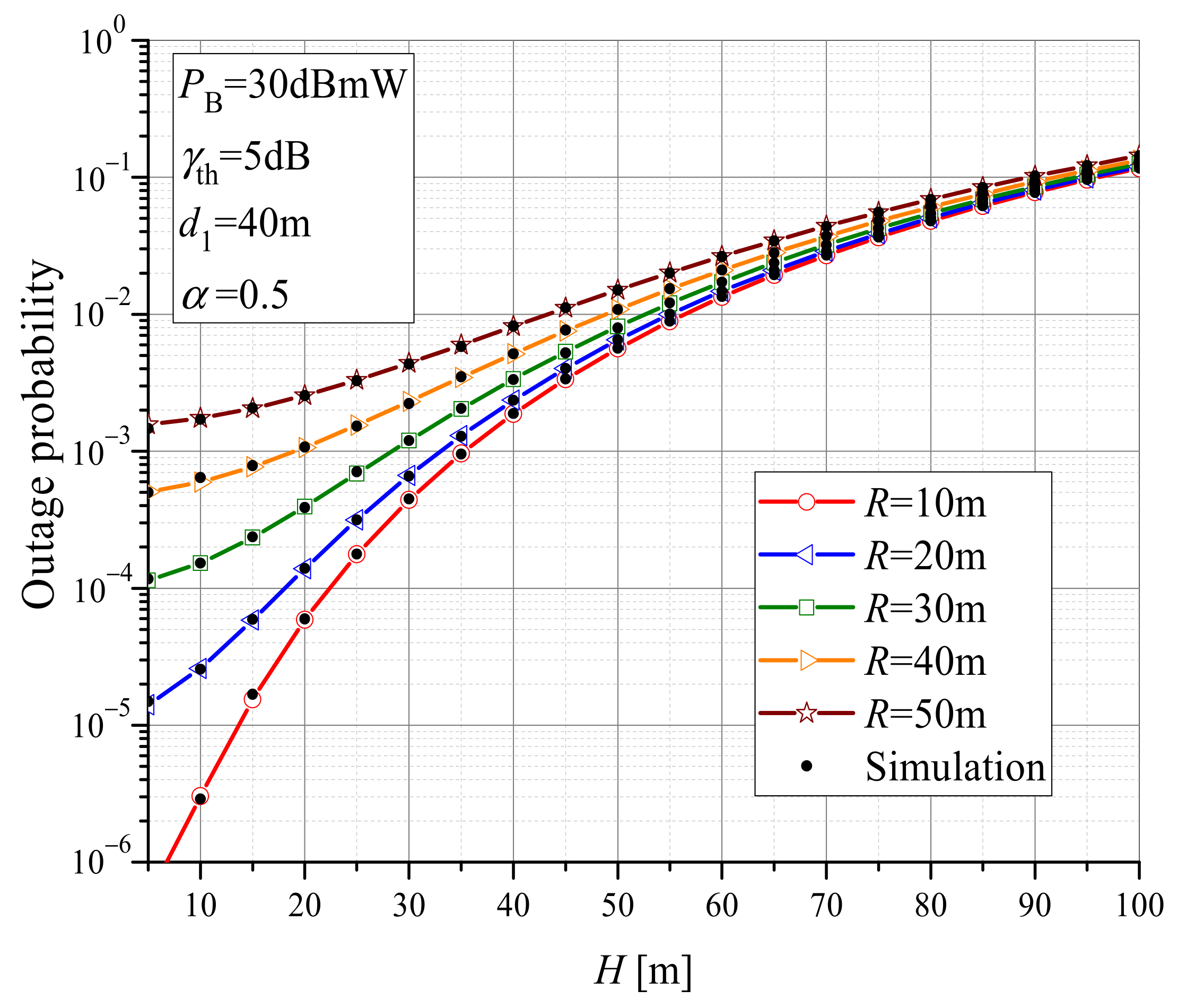
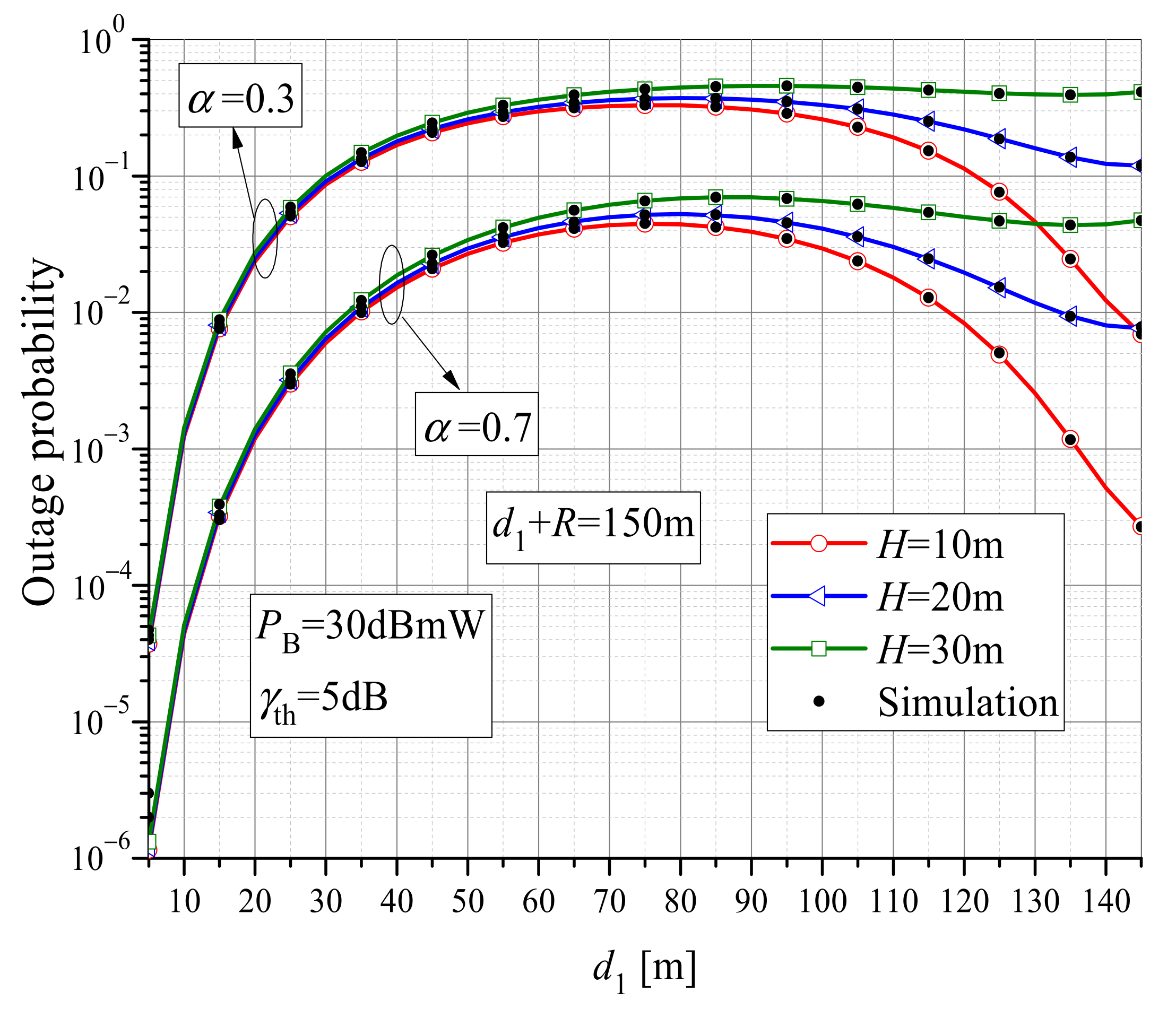
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Popescu, D.; Stoican, F.; Stamatescu, G.; Chenaru, O.; Ichim, L. A Survey of Collaborative UAV–WSN Systems for Efficient Monitoring. Sensors 2019, 19, 4690. [Google Scholar] [CrossRef] [PubMed]
- Rameshkumar, C.; Ganeshkumar, T. A Novel of Survey: In Healthcare System for Wireless Body-Area Network. In Applications of Computational Methods in Manufacturing and Product Design; Deepak, B.B.V.L., Parhi, D., Biswal, B., Jena, P.C., Eds.; Springer: Singapore, 2022; pp. 591–609. [Google Scholar] [CrossRef]
- Yaghoubi, M.; Ahmed, K.; Miao, Y. Wireless Body Area Network (WBAN): A Survey on Architecture, Technologies, Energy Consumption, and Security Challenges. J. Sens. Actuator Netw. 2022, 11, 67. [Google Scholar] [CrossRef]
- Lanzolla, A.; Spadavecchia, M. Wireless Sensor Networks for Environmental Monitoring. Sensors 2021, 21, 1172. [Google Scholar] [CrossRef] [PubMed]
- Majid, M.; Habib, S.; Javed, A.R.; Rizwan, M.; Srivastava, G.; Gadekallu, T.R.; Lin, J.C.-W. Applications of Wireless Sensor Networks and Internet of Things Frameworks in the Industry Revolution 4.0: A Systematic Literature Review. Sensors 2022, 22, 2087. [Google Scholar] [CrossRef]
- Compare, M.; Baraldi, P.; Zio, E. Challenges to IoT-Enabled Predictive Maintenance for Industry 4.0. IEEE Internet Things J. 2020, 7, 4585–4597. [Google Scholar] [CrossRef]
- Malik, P.K.; Sharma, R.; Singh, R.; Gehlot, A.; Satapathy, S.C.; Alnumay, W.S.; Pelusi, D.; Ghosh, U.; Nayak, J. Industrial Internet of Things and its Applications in Industry 4.0: State of The Art. Comput. Commun. 2021, 166, 125–139. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, X.; Shu, L.; Hancke, G.P.; Abu-Mahfouz, A.M. From Industry 4.0 to Agriculture 4.0: Current Status, Enabling Technologies, and Research Challenges. IEEE Trans. Industr. Inform. 2021, 17, 4322–4334. [Google Scholar] [CrossRef]
- Oztemel, E.; Gursev, S. Literature Review of Industry 4.0 and Related Technologies. J. Intell. Manuf. 2020, 31, 127–182. [Google Scholar] [CrossRef]
- Prauzek, M.; Konecny, J.; Borova, M.; Janosova, K.; Hlavica, J.; Musilek, P. Energy Harvesting Sources, Storage Devices and System Topologies for Environmental Wireless Sensor Networks: A Review. Sensors 2018, 18, 2446. [Google Scholar] [CrossRef]
- Huda, S.M.A.; Arafat, M.Y.; Moh, S. Wireless Power Transfer in Wirelessly Powered Sensor Networks: A Review of Recent Progress. Sensors 2022, 22, 2952. [Google Scholar] [CrossRef]
- Masotti, D.; Shanawani, M.; Murtaza, G.; Paolini, G.; Costanzo, A. RF Systems Design for Simultaneous Wireless Information and Power Transfer (SWIPT) in Automation and Transportation. IEEE J. Microw. 2021, 1, 164–175. [Google Scholar] [CrossRef]
- Costanzo, A.; Masotti, D.; Paolini, G.; Schreurs, D. Evolution of SWIPT for the IoT World: Near- and Far-Field Solutions for Simultaneous Wireless Information and Power Transfer. IEEE Microw. Mag. 2021, 22, 48–59. [Google Scholar] [CrossRef]
- Phan, V.D.; Nguyen, T.N.; Tran, M.; Trang, T.T.; Voznak, M.; Ha, D.H.; Nguyen, T.L. Power Beacon-Assisted Energy Harvesting in a Half-Duplex Communication Network under Co-channel Interference over a Rayleigh Fading Environment: Energy Efficiency and Outage Probability Analysis. Energies 2019, 12, 2579. [Google Scholar] [CrossRef]
- Verma, G.; Sharma, V. A Novel RF Energy Harvester for Event-Based Environmental Monitoring in Wireless Sensor Networks. IEEE Internet Things J. 2022, 9, 3189–3203. [Google Scholar] [CrossRef]
- Choi, H.-H.; Lee, J.-R. Energy-Neutral Operation Based on Simultaneous Wireless Information and Power Transfer for Wireless Powered Sensor Networks. Energies 2019, 12, 3823. [Google Scholar] [CrossRef]
- Le, C.B.; Nguyen, N.D. Enabling Power Beacons and Wireless Power Transfers for Non-Orthogonal Multiple Access Networks. J. Telecommun. Inf. Technol. 2021, 3, 1. [Google Scholar] [CrossRef]
- Zhou, X.; Guo, J.; Durrani, S.; Di Renzo, M. Power Beacon-Assisted Millimeter Wave Ad Hoc Networks. IEEE Trans. Commun. 2018, 66, 830–844. [Google Scholar] [CrossRef]
- Elshrkasi, A.; Dimyati, K.; Ahmad, K.A.B.; Abdullah, E. Employing an Energy Harvesting Strategy to Enhance the Performance of a Wireless Emergency Network. Sensors 2022, 22, 4385. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Nguyen, C.V.; Do, H.T.; Hua, H.T.; Tran, T.A.; Nguyen, A.D.; Ala, G.; Viola, F. UAV-assisted Data Collection in Wireless Sensor Networks: A Comprehensive Survey. Electronics 2021, 10, 2603. [Google Scholar] [CrossRef]
- Noor, F.; Khan, M.A.; Al-Zahrani, A.; Ullah, I.; Al-Dhlan, K.A. A Review on Communications Perspective of Flying Ad-Hoc Networks: Key Enabling Wireless Technologies, Applications, Challenges and Open Research Topics. Drones 2020, 4, 65. [Google Scholar] [CrossRef]
- Shah, A.F.M.S. Architecture of Emergency Communication Systems in Disasters through UAVs in 5G and Beyond. Drones 2023, 7, 25. [Google Scholar] [CrossRef]
- Azam, I.; Shahab, M.B.; Shin, S.Y. Energy-Efficient Pairing and Power Allocation for NOMA UAV Network Under QoS Constraints. IEEE Internet Things J. 2022, 9, 25011–25026. [Google Scholar] [CrossRef]
- Liu, X.; Li, Z.; Zhao, N.; Meng, W.; Gui, G.; Chen, Y.; Adachi, F. Transceiver Design and Multihop D2D for UAV IoT Coverage in Disasters. IEEE Internet Things J. 2019, 6, 1803–1815. [Google Scholar] [CrossRef]
- Bithas, P.S.; Nikolaidis, V.; Kanatas, A.G.; Karagiannidis, G.K. UAV-to-Ground Communications: Channel Modeling and UAV Selection. IEEE Trans Commun. 2020, 68, 5135–5144. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zheng, G. Effect of User Mobility and Channel Fading on the Outage Performance of UAV Communications. IEEE Wireless Commun. Lett. 2020, 9, 367–370. [Google Scholar] [CrossRef]
- Sharma, P.K.; Deepthi, D.; Kim, D.I. Outage Probability of 3-D Mobile UAV Relaying for Hybrid Satellite-Terrestrial Networks. IEEE Commun. Lett. 2020, 24, 418–422. [Google Scholar] [CrossRef]
- Sarfraz, M.; Sohail, M.F.; Alam, S.; Javvad ur Rehman, M.; Ghauri, S.A.; Rabie, K.; Abbas, H.; Ansari, S. Capacity Optimization of Next-Generation UAV Communication Involving Non-Orthogonal Multiple Access. Drones 2022, 6, 234. [Google Scholar] [CrossRef]
- Nguyen, A.-N.; Vo, V.N.; So-In, C.; Ha, D.-B. System Performance Analysis for an Energy Harvesting IoT System Using a DF/AF UAV-Enabled Relay with Downlink NOMA under Nakagami-m Fading. Sensors 2021, 21, 285. [Google Scholar] [CrossRef]
- Hoseini, S.A.; Hassan, J.; Bokani, A.; Kanhere, S.S. In Situ MIMO-WPT Recharging of UAVs Using Intelligent Flying Energy Sources. Drones 2021, 5, 89. [Google Scholar] [CrossRef]
- Ji, B.; Li, Y.; Zhou, B.; Li, C.; Song, K.; Wen, H. Performance Analysis of UAV Relay Assisted IoT Communication Network Enhanced With Energy Harvesting. IEEE Access 2019, 7, 38738–38747. [Google Scholar] [CrossRef]
- Tran, D.H.; Nguyen, V.D.; Chatzinotas, S.; Vu, T.X.; Ottersten, B. UAV Relay-Assisted Emergency Communications in IoT Networks: Resource Allocation and Trajectory Optimization. IEEE Trans. Wirel. Commun. 2022, 21, 1621–1637. [Google Scholar] [CrossRef]
- Singh, S.K.; Agrawal, K.; Singh, K.; Li, C.-P. Outage Probability and Throughput Analysis of UAV-Assisted Rate-Splitting Multiple Access. IEEE Wireless Commun. Lett. 2021, 10, 2528–2532. [Google Scholar] [CrossRef]
- Zhang, J.; Chuai, G.; Gao, W. Energy-Efficient Optimization for Energy-Harvesting-Enabled mmWave-UAV Heterogeneous Networks. Entropy 2022, 24, 300. [Google Scholar] [CrossRef]
- Liu, Y.; Dai, H.N.; Wang, H.; Imran, M.; Wang, X.; Shoaib, M. UAV-enabled Data Acquisition Scheme with Directional Wireless Energy Transfer for Internet of Things. Comput. Commun. 2020, 155, 184–196. [Google Scholar] [CrossRef]
- Lei, H.; Wang, D.; Park, K.H.; Ansari, I.S.; Jiang, J.; Pan, G.; Alouini, M.S. Safeguarding UAV IoT Communication Systems Against Randomly Located Eavesdroppers. IEEE Internet Things J. 2020, 7, 1230–1244. [Google Scholar] [CrossRef]
- Aiello, G.; Hopps, F.; Santisi, D.; Venticinque, M. The Employment of Unmanned Aerial Vehicles for Analyzing and Mitigating Disaster Risks in Industrial Sites. IEEE Trans. Eng. Manag. 2022, 67, 519–530. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef]
- Yacoub, M.D.; Bautista, J.V.; de Rezende Guedes, L.G. On Higher Order Statistics of the Nakagami-m Distribution. IEEE Trans. Veh. Technol. 1999, 48, 790–794. [Google Scholar] [CrossRef]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Zhang, Y.; Ye, J.; Pan, G.; Alouini, M.S. Secrecy Outage Analysis for Satellite-Terrestrial Downlink Transmissions. IEEE Wireless Commun. Lett. 2020, 9, 1643–1647. [Google Scholar] [CrossRef]
- Boschiero, M.; Giordani, M.; Polese, M.; Zorzi, M. Coverage Analysis of UAVs in Millimeter Wave Networks: A stochastic Geometry Approach. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020. [Google Scholar]
- Gu, Y.; Aïssa, S. RF-Based Energy Harvesting in Decode-and-Forward Relaying Systems: Ergodic and Outage Capacities. IEEE Trans. Wirel. Commun. 2015, 14, 6425–6434. [Google Scholar] [CrossRef]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series, and Products, 7th ed.; Elsevier/Academic Press: London, UK, 2007. [Google Scholar]
- Papoulis, A. Probability, Random Variables, and Stochastic Processes; McGraw-Hill: New York, NY, USA, 1991. [Google Scholar]
- Karagiannidis, G.K.; Sagias, N.C.; Mathiopoulos, P.T. N∗Nakagami: A Novel Stochastic Model for Cascaded Fading Channels. IEEE Trans. Commun. 2007, 55, 1453–1458. [Google Scholar] [CrossRef]
- Shankar, P.M. Fading and Shadowing in Wireless Systems; Springer: New York, NY, USA, 2012. [Google Scholar]
- Wolfram Research. Available online: https://functions.wolfram.com/ (accessed on 20 October 2022).












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cvetković, A.; Blagojević, V.; Manojlović, J. Capacity Analysis of Power Beacon-Assisted Industrial IoT System with UAV Data Collector. Drones 2023, 7, 146. https://doi.org/10.3390/drones7020146
Cvetković A, Blagojević V, Manojlović J. Capacity Analysis of Power Beacon-Assisted Industrial IoT System with UAV Data Collector. Drones. 2023; 7(2):146. https://doi.org/10.3390/drones7020146
Chicago/Turabian StyleCvetković, Aleksandra, Vesna Blagojević, and Jelena Manojlović. 2023. "Capacity Analysis of Power Beacon-Assisted Industrial IoT System with UAV Data Collector" Drones 7, no. 2: 146. https://doi.org/10.3390/drones7020146
APA StyleCvetković, A., Blagojević, V., & Manojlović, J. (2023). Capacity Analysis of Power Beacon-Assisted Industrial IoT System with UAV Data Collector. Drones, 7(2), 146. https://doi.org/10.3390/drones7020146