
Attitude Control of a Hypersonic Glide Vehicle Based on Reduced-Order Modeling and NESO-Assisted Backstepping Variable Structure Control



Abstract
:1. Introduction
- (1)
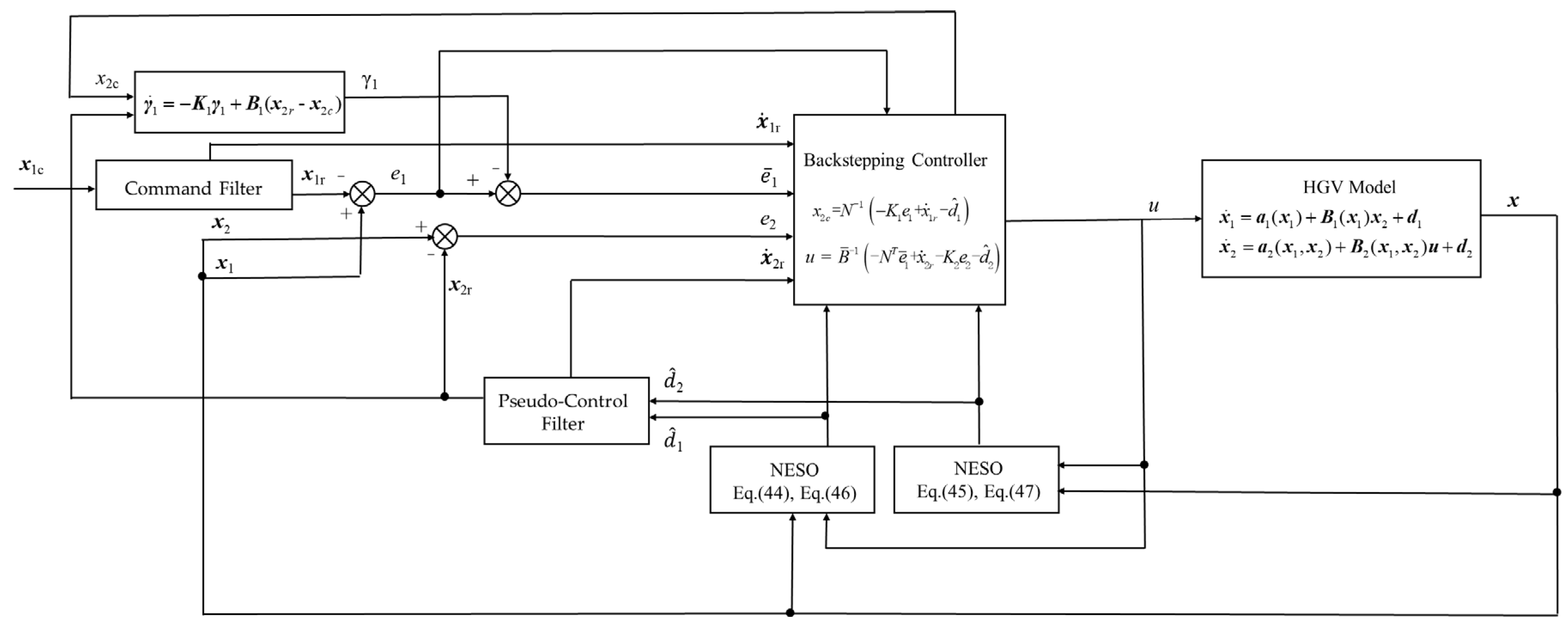
- According to the quality of the estimation of the uncertainties by the Extended State Observer (ESO), the corresponding design idea of the improved backstepping variable structure controller is proposed in this paper. The design of the whole system is divided into two first-order subsystems, and the pseudo-control filter is introduced while the error signal is corrected ensuring the adaptability of the attitude controller to the large-scale variation of vehicle’s parameters.
- (2)
- For unknown system states and unpredictable disturbances of two first-order subsystems, two sets of second-order NESO are designed to estimate these two kinds of uncertainties, respectively, and those two nonlinear dynamic changes are regarded as an aggregate uncertainty. Especially, a systematic method for determining those two second-order NESOs parameters is designed in this paper, and the stability of the observer is proven completely using the piecewise Lyapunov analysis. Aiming at avoiding complicated analytical operations, this paper proposes an improved backstepping control method by introducing the pseudo-control filter and the correcting the error signal assisted with the NESO.
2. Extended State Observer
2.1. Scenario Design
2.2. Analysis and Design of Second-Oeder NESO
3. NESO-Assisted Backstepping Variable Structure Attitude Control
3.1. Reduced-Order Modeling
3.2. Improved Backstepping Control
3.3. NESO-Assisted Backstepping Variable Structure Attitude Controller Design
- (1)
- The attitude control is realized by angular velocity tracking pseudo control, and the tracking of the angle velocity to the pseudo control is realized by the control torque generated from the pneumatic rudder surface. Based on the idea of backstepping, the influence of the inner loop angle velocity tracking error on the outer loop attitude tracking error is eliminated without the separation of the inner and outer loop time scale.
- (2)
- In order to solve the problem that the analytical expression of the pseudo control derivative in the traditional backstepping control is difficult to calculate, the pseudo control filter is used to simplify the solution of the pseudo control derivative and the influence of the introduction of the pseudo control filter on the tracking error is eliminated by modifying the tracking error signal. At the same time, the limitation on the state of the system and the influence of reducing noise can also be considered in the design of the pseudo control filter.
- (3)
- In order to overcome the shortcomings of poor robustness and easy to saturate control quantity of simple backstepping control, NESO is introduced to augment backstepping controller. Once the derivative of uncertainty is bounded, the design of appropriate observer parameters can make the estimation error quickly converge, and the control torque can change accordingly with the actual change of uncertainty, which improves the robustness to uncertainty under the premise of economical control.
4. Simulations and Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- An, K.; Guo, Z.-Y.; Xu, X.-P.; Huang, W. A Framework of Trajectory Design and Optimization for the Hypersonic Gliding Vehicle. Aerosp. Sci. Technol. 2020, 106, 106–110. [Google Scholar] [CrossRef]
- Hutchinson, R.; Lawrence, J.; Joiner, K.F. Conceptual design and integration of a propulsion system for a supersonic transport aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 583–592. [Google Scholar] [CrossRef]
- Le, V.T.; San Ha, N.; Goo, N.S. Advanced sandwich structures for thermal protection systems in hypersonic vehicles: A review. Compos. Part B Eng. 2021, 226, 109301. [Google Scholar] [CrossRef]
- Bai, C.; Chen, J.; Ren, Z.; Li, Q.; Xiong, Z. Adaptive decoupling control of hypersonic vehicle using fuzzy-neural network observer. Proc. Inst. Mech. Eng. 2016, 230, 1216–1223. [Google Scholar] [CrossRef]
- Chen, J.; Zhao, Q.; Liang, Z.; Li, P.; Ren, Z.; Zheng, Y. Fractional calculus guidance algorithm in a hypersonic pursuit-evasion game. Def. Sci. J. 2017, 67, 688–697. [Google Scholar] [CrossRef]
- Chen, J.; Du, N.; Han, Y. Decoupling attitude control of a hypersonic glide vehicle based on a nonlinear extended state observer. Int. J. Aerosp. Eng. 2020, 2020, 1–11. [Google Scholar] [CrossRef]
- Gao, Z.; Huang, Y.; Han, J. An alternative paradigm for control system design. In Proceedings of the IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; pp. 4578–4585. [Google Scholar]
- Zheng, Q.; Gao, L.Q.; Gao, Z. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics. In Proceedings of the IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 3501–3506. [Google Scholar]
- Yoo, D.; Yau, S.T.; Gao, Z. On convergence of the linear extended state observer. In Proceedings of the IEEE International Conference on Control Applications, Munich, Germany, 4–6 October 2006; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Huang, Y.; Han, J. A new synthesis method for uncertain systems the Self-Stable Region approach. Asian Control. Conf. 1999, 30, 33–38. [Google Scholar] [CrossRef]
- Huang, Y.; Han, J. Analysis and design for the second order nonlinear continuous extended states observer. Chin. Sci. Bull. 2000, 45, 1938–1944. [Google Scholar] [CrossRef]
- Huang, Y.; Xu, K.; Han, J.; Lam, L. Flight control design using extended state observer and non-smooth feedback. In Proceedings of the IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; pp. 223–228. [Google Scholar]
- Zhang, R.; Han, J. Parameter identification by model compensation auto disturbance rejection controller. Control Theory Appl. 2000, 17, 79–81. [Google Scholar]
- Pu, Z.; Yuan, R.; Yi, J.; Tan, X. A class of adaptive extended state observers for nonlinear disturbed systems. IEEE Trans. Ind. Electron. 2015, 62, 5858–5869. [Google Scholar] [CrossRef]
- Utkin, V. Variable structure systems with sliding modes. IEEE Trans. Autom. Control 1977, 22, 212–222. [Google Scholar] [CrossRef]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef]
- Song, S.; Zhang, B.; Xia, J.; Zhang, Z. Adaptive Backstepping Hybrid Fuzzy Sliding Mode Control for Uncertain Fractional-Order Nonlinear Systems Based on Finite-Time Scheme. IEEE Trans. Syst. Man Cybern.: Syst. 2020, 50, 1559–1569. [Google Scholar] [CrossRef]
- Hao, L.Y.; Zhang, H.; Yue, W.; Li, H. Fault-tolerant Compensation Control Based on Sliding Mode Technique of Unmanned Marine Vehicles Subject to Unknown Persistent Ocean Disturbances. Int. J. Control. Autom. Syst. 2020, 18, 739–752. [Google Scholar] [CrossRef]
- Xu, C.; Tong, D.; Chen, Q.; Zhou, W.; Shi, P. Exponential stability of Markovian jumping systems via adaptive sliding mode control. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 954–964. [Google Scholar] [CrossRef]
- Jiang, B.; Karimi, H.R.; Yang, S.; Gao, C.; Kao, Y. Observer-based adaptive sliding mode control for nonlinear stochastic Markov jump systems via T–S fuzzy modeling: Applications to robot arm model. IEEE Trans. Ind. Electron. 2020, 68, 466–477. [Google Scholar] [CrossRef]
- Ahmed, S.; Wang, H.; Tian, Y. Adaptive high-order terminal sliding mode control based on time delay estimation for the robotic manipulators with backlash hysteresis. IEEE Trans. Syst. Man Cybern.: Syst. 2019, 51, 1128–1137. [Google Scholar] [CrossRef]
- Gao, K.; Li, Q.; Ren, Z.; Bai, C. Observer-based attitude control for hypersonic gliding vehicle. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1159–1162. [Google Scholar]
- Liu, X.; Zhang, Y.; Wang, S.; Huang, W. Backstepping attitude control for hypersonic gliding vehicle based on a robust dynamic inversion approach. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2014, 228, 543–552. [Google Scholar] [CrossRef]
- Zhang, P.; Du, Y. The robust maneuver flight control of hypersonic glide vehicles with input saturation using disturbance observer. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 6584–6589. [Google Scholar]
- Zhang, Y.; Dong, X.; Yu, J.; Li, Q.; Ren, Z. Robust adaptive control for hypersonic gliding vehicles based on NESO. In Proceedings of the 2017 13th IEEE International Conference on Control & Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 431–436. [Google Scholar]
- Zhang, W.; Huang, X.; Gao, X.Z. TS Fuzzy Modelling and Attitude Control for Hypersonic Gliding Vehicles. Math. Probl. Eng. 2017, 2017, 1–14. [Google Scholar]
- Chen, E.; Jing, W.; Gao, C.; Zhang, Z. An adaptive control approach for a flexible hypersonic glide vehicle. In Proceedings of the 2018 9th International Conference on Mechanical and Aerospace Engineering (ICMAE), Budapest, Hungary, 10–13 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Zhao, K.; Cao, D.Q.; Huang, W.H. Maneuver control of the hypersonic gliding vehicle with a scissored pair of control moment gyros. Sci. China Technol. Sci. 2018, 61, 1150–1160. [Google Scholar] [CrossRef]
- Wei, P.; Jing, W.; Gao, C. Dynamics and control for hypersonic gliding vehicles equipped with a moving mass and RCS. J. Aerosp. Eng. 2019, 32, 06019003. [Google Scholar] [CrossRef]
- Li, P.; Yu, X.; Zhang, Y.; Peng, X. Adaptive multivariable integral TSMC of a hypersonic gliding vehicle with actuator faults and model uncertainties. IEEE/ASME Trans. Mechatron. 2017, 22, 2723–2735. [Google Scholar] [CrossRef]
- Yu, X.; Li, P.; Zhang, Y. The design of fixed-time observer and finite-time fault-tolerant control for hypersonic gliding vehicles. IEEE Trans. Ind. Electron. 2017, 65, 4135–4144. [Google Scholar] [CrossRef]
- Yu, X.; Li, P.; Zhang, Y. Fixed-time actuator fault accommodation applied to hypersonic gliding vehicles. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1429–1440. [Google Scholar] [CrossRef]
- Gu, P.; Qi, R.; Jiang, B. Sliding Mode Tracking Control and GA-based Optimization for Reentry Guidance Subject to Multi-Constraints. In Proceedings of the 2018 IEEE CSAA Guidance, Navigation and Control Conference (CGNCC), Xiamen, China, 10–12 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Zhai, S.; Yang, J. Piecewise analytic optimized ascent trajectory design and robust adaptive finite-time tracking control for hypersonic boost-glide vehicle. J. Frankl. Inst. 2020, 357, 5485–5501. [Google Scholar] [CrossRef]
- An, K.; Guo, Z.-Y.; Huang, W.; Xu, X.-P. Leap trajectory tracking control based on sliding mode theory for hypersonic gliding vehicle. J. Zhejiang Univ.-SCIENCE A 2022, 23, 188–207. [Google Scholar] [CrossRef]
- Qian, C.; Sun, C.; Huang, Y.; Mu, C.; Zhang, J.; Zhang, R. Design of flight control system for a hypersonic gliding vehicle based on nonlinear disturbance observer. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Chongqing, China, 28–30 May 2017; IEEE: Piscataway, NJ, USA, 2013; pp. 1573–1577. [Google Scholar]
- Ping, S.; Yanli, D.; Peng, Z.; Kai, X. The nonlinear anti-windup control of hypersonic glide vehicles with input saturation and uncertainties. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Hangzhou, China, 12–14 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 4631–4637. [Google Scholar]
- Liu, X.; Shen, Z. Rapid smooth entry trajectory planning for high lift/drag hypersonic glide vehicles. J. Optim. Theory Appl. 2016, 168, 917–943. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, X.; Tang, S. A globally fixed-time solution of distributed formation control for multiple hypersonic gliding vehicles. Aerosp. Sci. Technol. 2020, 98, 105643. [Google Scholar] [CrossRef]
- Wang, S.; Chen, J.; He, X. An adaptive composite disturbance rejection for attitude control of the agricultural quadrotor UAV. ISA Trans. 2022, 129, 564–579. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, S.; Chen, J.; Han, Y. A bionic dynamic path planning algorithm of the micro UAV based on the fusion of deep neural network optimization/filtering and hawk-eye vision. IEEE Trans. Syst. Man Cybern. Syst. 2023, 2023, 1–13. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, J.; Xu, X.; Liu, C.; Han, Y. Hawk-eye-inspired perception algorithm of stereo vision for obtaining orchard 3D point cloud navigation map. CAAI Trans. Intell. Technol. 2022, 2022, 1–15. [Google Scholar] [CrossRef]
- Le, W.; Xue, Z.; Chen, J.; Zhang, Z. Coverage path planning based on the optimization strategy of multiple solar powered unmanned aerial vehicles. Drones 2022, 6, 203. [Google Scholar] [CrossRef]
- Wang, S.; Han, Y.; Chen, J.; He, X.; Zhang, Z.; Liu, X.; Zhang, K. Weed density extraction based on few-shot learning through UAV remote sensing RGB and multispectral images in ecological irrigation area. Front. Plant Sci. 2022, 12, 3456. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Problem | Solution Method | Effect | Author (Year) |
|---|---|---|---|
| Attitude Control | Observer-based approach | Reduced the static error. | Kehan Gao et al. (2014) [23] |
| Robust dynamic inversion control approach | Better tracking rapidity, accuracy, and stability than traditional dynamic inversion control. | Xiaodong Liu et al. (2014) [24] | |
| Modified nonlinear disturbance observer | Successfully estimated the disturbances and solved input saturation problem. | Peng Zhang et al. (2017) [25] | |
| Robust adaptive controller (nominal controller, NESO and compensation controller) | Eliminated the nonlinear influence and offset the observation error. | Yuan Zhang et al. (2017) [26] | |
| State feedback fuzzy controller (T-S Fuzzy Modeling) | Better than other local controllers. | Weidong Zhang et al. (2017) [27] | |
| Adaptive control approach based on moving horizon least square method | Effectively controlled the attitude of flexible HGV. | Erkang Chen et al. (2018) [28] | |
| Decoupling controller based on feedback linearization | Significantly increased the airspace range and flexibility of the HGV | Kun Zhao et al. (2018) [29] | |
| Sliding mode control and adaptive compensation (composed control) | High robustness to aerodynamic parameter Uncertainties. | Pengxin Wei et al. (2019) [30] | |
| Decoupling control method based on a NESO | Compensated the channel-coupling to a great extent better than traditional subchannel feedback control. | Jian Chen et al. (2020) [6] | |
| Fault-tolerant control | Combined multivariable integral Terminal Sliding Mode Control (TSMC) and adaptive techniques | Solved the actuator gain and bias malfunction in time. | Peng Li et al. (2017) [31] |
| Fixed-time observer and finite-time multivariable TSMC | The estimation error can converge to zero and the fault system can be stably controlled in a limited time. | Xiang Yu et al. (2017) [32] | |
| SMC, bilimit homogeneity, and adaptive techniques | Eliminiated the tracking error in the case of actuator failure and generated continuous control signals to avoid chattering. | Xiang Yu et al. (2020) [33] | |
| Trajectory tracking control | Sliding mode tracking control | Improved the ability of robustness of the reentry gliding of HGV | Panfei Gu et al. (2018) [34] |
| Robust adaptive controller | The tracking error converges to a small neighborhood close to zero in finite time. | Sheng Zhai et al. (2020) [35] | |
| A combined super-twisting sliding mode Controller | Had strong robustness to initial uncertain parameters and other disturbances and appropriate gain. | Kai An et al. (2022) [36] | |
| Disturbance rejection control | Nonlinear disturbance observer and sliding mode controller | Estimated unknown interference and compensated the estimation error. | Chengshan Qian et al. (2013) [37] |
| Novel sigmoid function tracking differentiator-based disturbance observer | Did not rely on the priori information about the bounds of disturbances and had global fast convergence property. | Ping Sun et al. (2017) [38] | |
| Optimal control | Convexified the nonconvexity terms of the optimal control | Smooth entered trajectory in about 1 s. | Xinfu Liu et al. (2016) [39] |
| Formation control | The fixed-time stability and the hierarchical control theory | Established the desired formation configuration in a prescribed convergence time. | Yao Zhang et al. (2019) [40] |
| State | |||||||
|---|---|---|---|---|---|---|---|
| Initial value | 50 km | 5000 m/s | 0° | 0° | 60° | −0.573° | −90° |
| State | Pitch | Yaw | Roll | Longitude | Latitude | Body angular velocity | Simulation step size h |
| Initial value | −0.573° | −90° | 60° | 0° | 0° | [0,0,0]T | 0.02 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, W.; Liu, H.; Zhao, R.; Chen, J. Attitude Control of a Hypersonic Glide Vehicle Based on Reduced-Order Modeling and NESO-Assisted Backstepping Variable Structure Control. Drones 2023, 7, 119. https://doi.org/10.3390/drones7020119
Le W, Liu H, Zhao R, Chen J. Attitude Control of a Hypersonic Glide Vehicle Based on Reduced-Order Modeling and NESO-Assisted Backstepping Variable Structure Control. Drones. 2023; 7(2):119. https://doi.org/10.3390/drones7020119
Chicago/Turabian StyleLe, Wenxin, Hanyu Liu, Ruiyuan Zhao, and Jian Chen. 2023. "Attitude Control of a Hypersonic Glide Vehicle Based on Reduced-Order Modeling and NESO-Assisted Backstepping Variable Structure Control" Drones 7, no. 2: 119. https://doi.org/10.3390/drones7020119
APA StyleLe, W., Liu, H., Zhao, R., & Chen, J. (2023). Attitude Control of a Hypersonic Glide Vehicle Based on Reduced-Order Modeling and NESO-Assisted Backstepping Variable Structure Control. Drones, 7(2), 119. https://doi.org/10.3390/drones7020119