
Meta-heuristic Algorithms in UAV Path Planning Optimization: A Systematic Review (2018–2022)


Abstract
:1. Introduction
Existing Systematic Literature Reviews and the Need for this Study
- RQ1: What types of meta-heuristic algorithms were used the most for optimizing UAV path planning?
- RQ2: What characteristics are considered as objectives and constraints of mathematical models for optimizing path planning using meta-heuristic algorithms?
- RQ3: What type of mathematical model was used the most for the optimization of UAV path planning using meta-heuristic algorithms?
- RQ4: What are the environmental types and dimensions employed for the optimization of path planning?
2. Methods
2.1. Database and Keywords
2.2. Eligibility Criteria
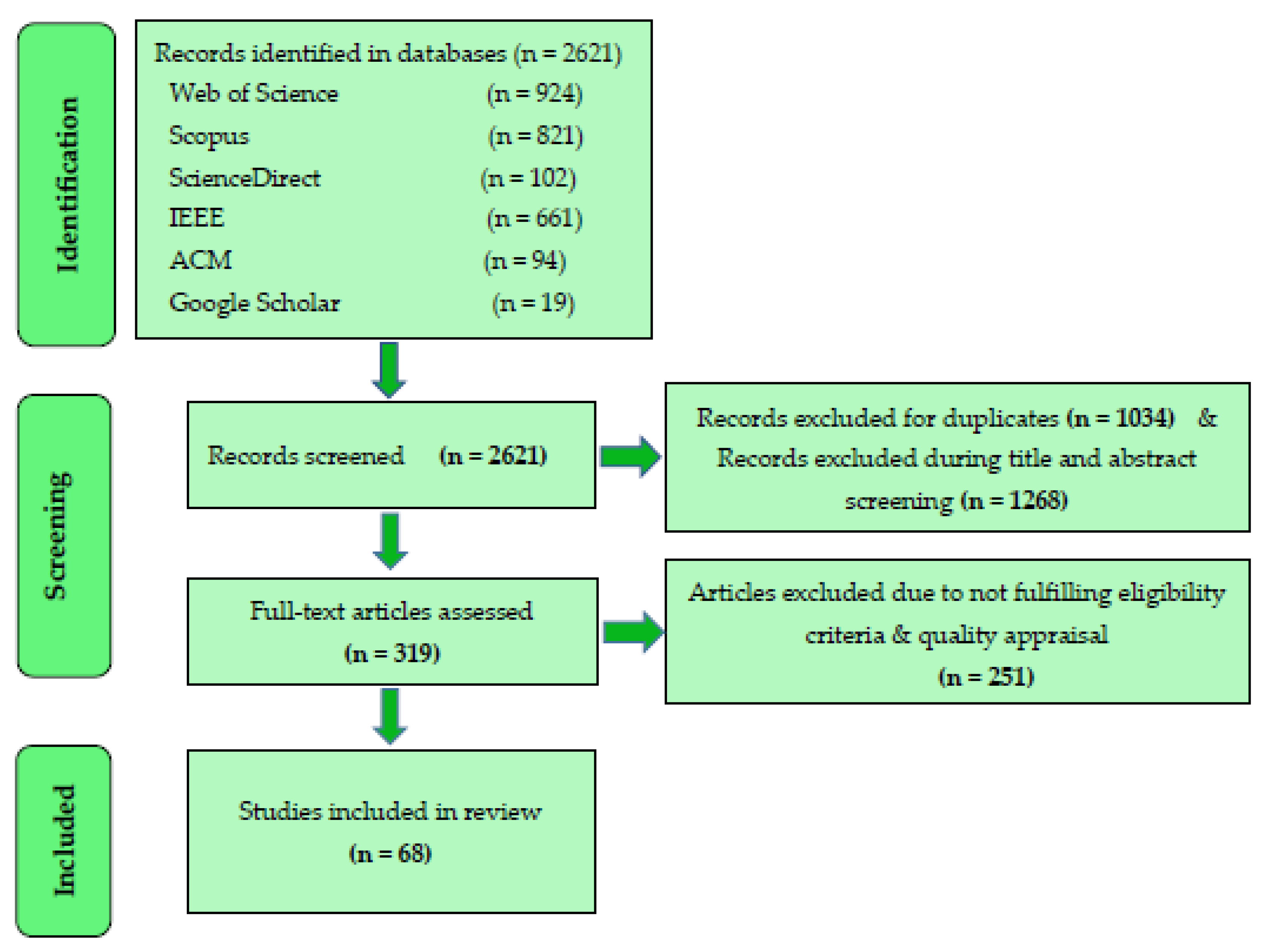
2.3. Study Selection
2.4. Data Extraction
3. Results and Analysis
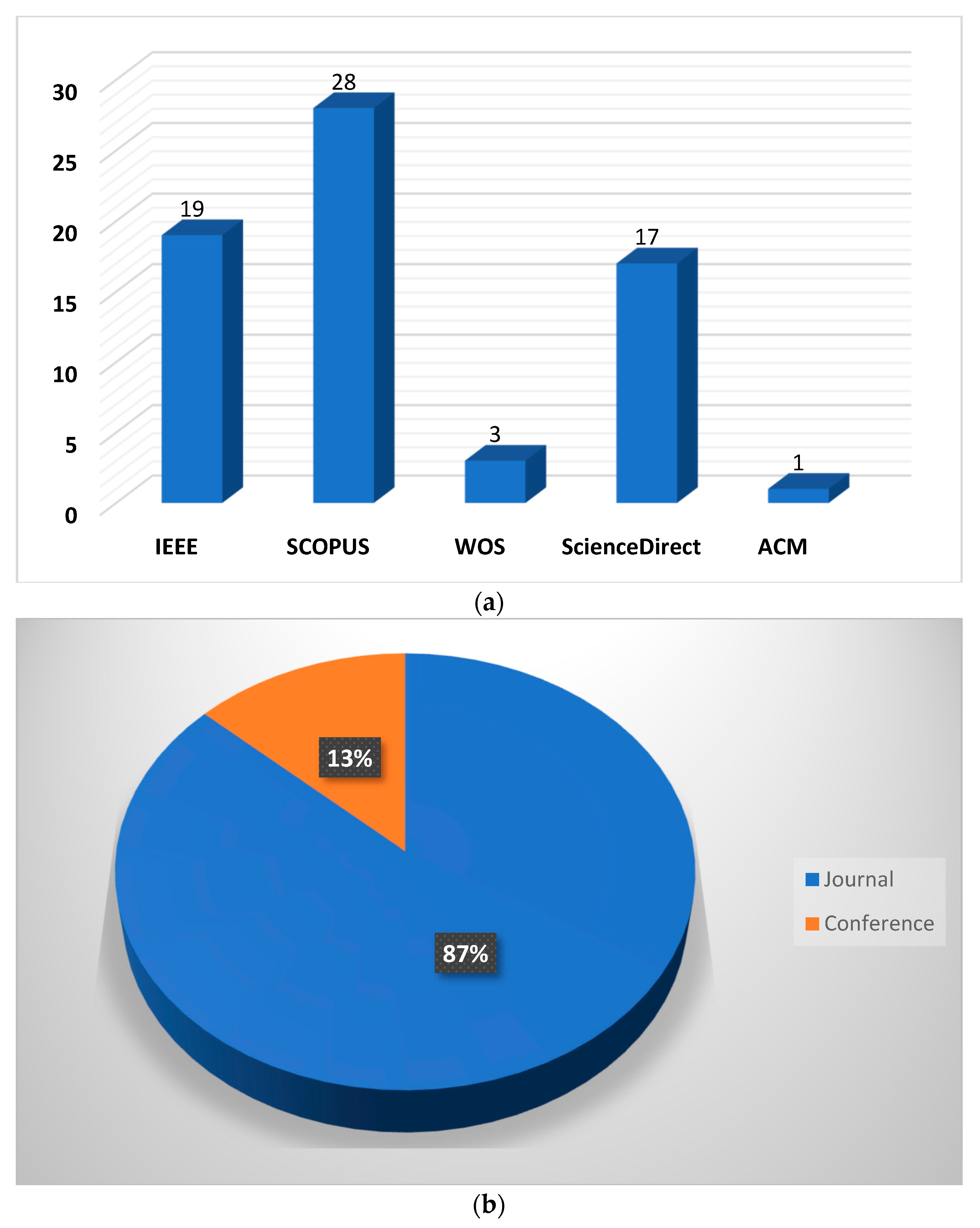
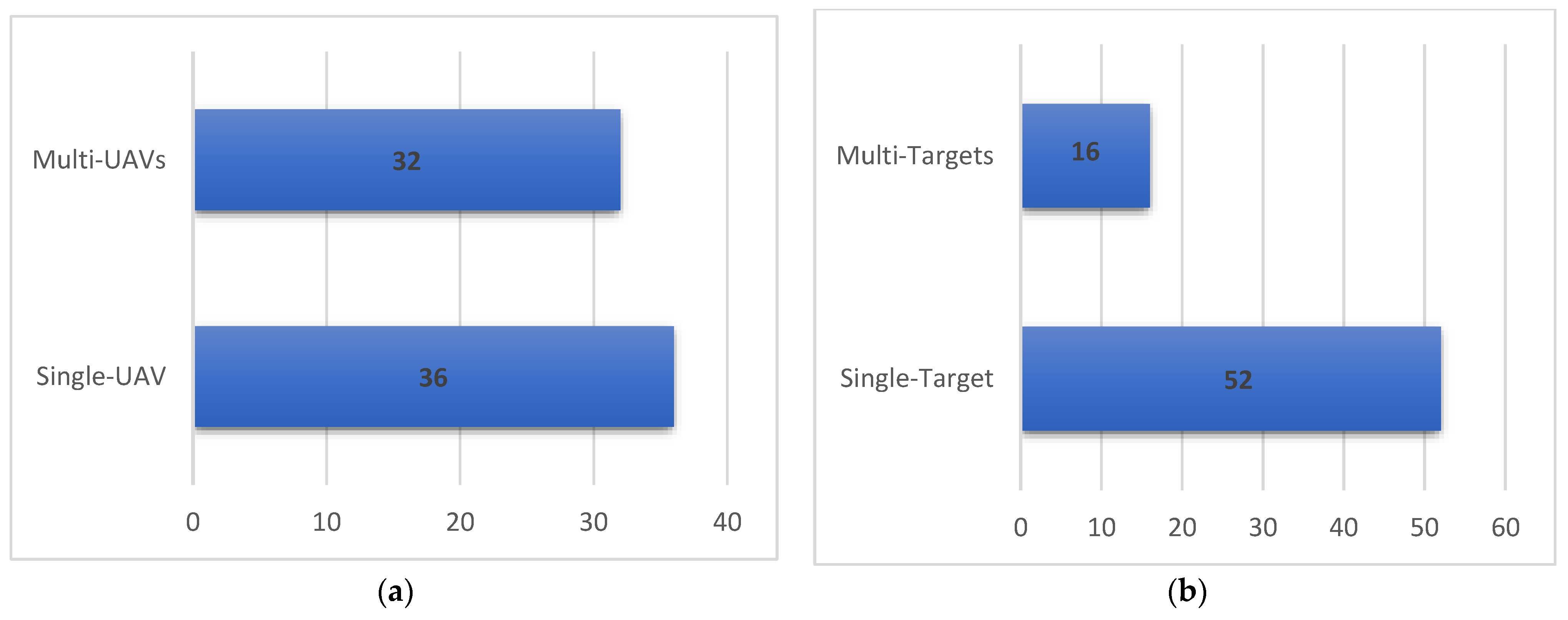
3.1. Characteristics of the Studies
3.2. Type of Meta-heuristic Algorithms
3.3. Objectives and Constraints
3.4. Mathematical Types
3.5. Environmental Types
4. Discussion
4.1. Trends and Focuses of the UAV Path Planning Optimization Research Community
4.2. Challenges for Optimizing UAV Path Planning using Meta-Heuristic Algorithms
5. Conclusions and Future Direction
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronyms | Definitions |
| UAV | Unmanned Aerial Vehicle |
| PSO | Particle Swarm Optimization |
| GWO | Grey Wolf Optimization |
| GA | Genetic Algorithm |
| APF | Artificial Potential Field |
| NSGA-II | Non-dominated Sorting Genetic Algorithm |
| MP-CGWO | Multi-Population Chaotic Grey Wolf Optimization |
| APP-PSO | Adaptive Path Planning Particle Swarm Optimization |
| mPSO | Modified Particle Swarm Optimization |
| Improved NSGA-II | Improved Non-dominated Sorting Genetic Algorithm |
| IIWD | Improved Intelligent Water Drop |
| IGWO | Improved Grey Wolf Optimization |
| GBSO-CR | Global-best Brain Storm Optimization based on Crossover Recombination |
| DGBCO | Dynamic Group-Based Cooperative Optimization |
| IBA | Improved Bat Algorithm |
| CAOSA | Chaotic Aquila Optimization Algorithm with Simulated Annealing |
| Multi-master parallel GA | Multi-Master Parallel Genetic Algorithm |
| MOMVO | Multi-Objective Multi-Verse Optimization |
| PSO-GA | Hybrid of Particle Swarm Optimization with Genetic Algorithm |
| ACO-APF | Ant Colony Optimization with Artificial potential field |
| GPM-ACO | Hybrid of Gauss pseudospectral method with Ant Colony Optimization |
| MVO | Multi-Verse Optimization |
| IHSSAO | Improved Hybrid Salp Swarm Algorithm and Aquila Optimizer |
| SDPSO | Hybrid Particle Swarm Optimization based on Strategy |
| SPSO | Spherical vector-based Particle Swarm Optimization |
| HHO-GWO | Harris Hawk Optimization –Grey Wolf Optimization |
| SCPIO | Social-Class Pigeon-Inspired Optimization |
| IWOA | Improved Whale Optimization Algorithm |
| AGA | Adaptive Genetic Algorithm |
| APFA | Artificial potential field Algorithm |
| PIOFOA | Hybrid of Improved Pigeon-inspired Optimization with Fruit fly Optimization Algorithm |
| HR-MAGA | Hierarchical Recursive Multi-Agent Genetic Algorithm |
| ORPFOA | Improved Fruit fly Optimization Algorithm (named ORPFOA) |
| BFKSA | Back-and-Forth-k-opt Simulated Annealing Approach (BFKSA) |
| EDA-GA | Hybrid algorithm integrating the Estimation of Distribution Algorithm (EDA) and the Genetic Algorithm (GA) |
| SRVM | Spatial Refined Voting Mechanism |
| I-GWO | Incremental Gray Wolf Optimization |
| CVRP | capacitated Vehicle Routing Problem |
| EX-GWO | Expanded Gray Wolf Optimization |
| QFOA | Quantum Behavior-Based Enhanced Fruit Fly Optimization Algorithm |
| LMIWD | Lost-water-drop (WDs that are trapped in map dead-ends)-based multiple swarms (multiswarm) IWD which called (LMIWD) algorithm |
| GEDGWO | Grey Wolf Optimizer using Gaussian Estimation of Distribution |
| RTTP | Real Time Trajectory Planner |
| HEA | Hybrid Evolutionary Algorithm |
| OMACO | Overdue-aware Multiple Ant Colony Optimization |
| CESMO | Cooperative co-Evolution (CE)-based Spider Monkey Optimization (SMO) algorithm, named CESMO |
| PCCGWO | Parallel Cooperative Coevolutionary Grey Wolf Optimizer |
| APPMS | Enhanced multi-objective Swarm Intelligence Algorithmis called (APPMS). |
| OCGA | Opposite and Chaos Searching Genetic Algorithm |
| SA-DFA | Discrete firefly algorithm with simulated annealing |
| MWSO | Modified White Shark Optimization |
| SJSA | Swap-and-Judge Simulated Annealing |
| MHEO | Multiple population Hybrid Equilibrium Optimizer |
| SA | Simulated Annealing |
| DEAKP | Differential Evolution Algorithm based on the Knee Point |
| Improved HHO | Improved Harris Hawks Optimization |
References
- Danancier, K.; Ruvio, D.; Sung, I.; Nielsen, P. Comparison of path planning algorithms for an unmanned aerial vehicle deployment under threats. IFAC-Pap. 2019, 52, 1978–1983. [Google Scholar] [CrossRef]
- Campioni, L.; Poltronieri, F.; Stefanelli, C.; Suri, N.; Tortonesi, M.; Wrona, K. Enabling civil–military collaboration for disaster relief operations in smart city environments. Futur. Gener. Comput. Syst. 2023, 139, 181–195. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Sehrawat, V. Legal status of drones under LOAC and international law. Penn St. JL Int’l Aff. 2017, 5, 164. [Google Scholar]
- Ullah, F.; Khan, S.I.; Munawar, H.S.; Qadir, Z.; Qayyum, S. UAV Based spatiotemporal analysis of the 2019–2020 new south wales bushfires. Sustainability 2021, 13, 10207. [Google Scholar] [CrossRef]
- Yu, X.; Li, C.; Yen, G.G. A knee-guided differential evolution algorithm for unmanned aerial vehicle path planning in disaster management. Appl. Soft Comput. 2021, 98, 106857. [Google Scholar] [CrossRef]
- Mesquita, R.; Gaspar, P.D. A novel path planning optimization algorithm based on particle swarm optimization for UAVs for bird monitoring and repelling. Processes 2021, 10, 62. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Yin, F.; Wang, W.; Sun, H.; Li, J.; Zhang, K. An intelligent UAV path planning optimization method for monitoring the risk of unattended offshore oil platforms. Process. Saf. Environ. Prot. 2022, 160, 13–24. [Google Scholar] [CrossRef]
- Rumba, R.; Nikitenko, A. The wild west of drones: A review on autonomous-UAV traffic-management. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Khan, S.I.; Qadir, Z.; Munawar, H.S.; Nayak, S.R.; Budati, A.K.; Verma, K.; Prakash, D. UAVs path planning architecture for effective medical emergency response in future networks. Phys. Commun. 2021, 47, 101337. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, H.; Han, T.; Zhou, H.; Li, C. A grey wolf optimizer using Gaussian estimation of distribution and its application in the multi-UAV multi-target urban tracking problem. Appl. Soft Comput. 2019, 78, 240–260. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2020, 153, 119293. [Google Scholar] [CrossRef]
- Mohammed, F.; Idries, A.; Mohamed, N.; Al-Jaroodi, J.; Jawhar, I. UAVs for smart cities: Opportunities and challenges. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Doherty, P.; Rudol, P. A UAV search and rescue scenario with human body detection and geolocalization. In Australasian Joint Conference on Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the International Conference on Computing, Networking and Communications, Kauai, HI, USA, 15–18 February 2016. [Google Scholar] [CrossRef]
- Qadir, Z.; Zafar, M.H.; Moosavi, S.K.R.; Le, K.N.; Mahmud, M.A.P. Autonomous UAV path planning optimization using meta-heuristic approach for predisaster assessment. IEEE Internet Things J. 2021, 9, 12505–12514. [Google Scholar] [CrossRef]
- Yahia, H.S.; Mohammed, A.S. Path planning optimization in unmanned aerial vehicles using meta-heuristic algorithms: A systematic review. Environ. Monit. Assess. 2023, 195, 30. [Google Scholar] [CrossRef] [PubMed]
- Flores-Caballero, G.; Rodríguez-Molina, A.; Aldape-Pérez, M.; Villarreal-Cervantes, M.G. Optimized path planning in continuous spaces for unmanned aerial vehicles using meta-heuristics. IEEE Access 2020, 8, 176774–176788. [Google Scholar] [CrossRef]
- Helnarska, K.; Krawczyk, J.; Motrycz, G. Legal regulations of UAVs in Poland and France. In Zeszyty Naukowe; Transport/Politechnika Śląska: Katowice, Poland, 2018. [Google Scholar]
- Lee, D.; Hess, D.J.; Heldeweg, M.A. Safety and privacy regulations for unmanned aerial vehicles: A multiple comparative analysis. Technol. Soc. 2022, 71, 102079. [Google Scholar] [CrossRef]
- Pádua, L.; Sousa, J.; Vanko, J.; Hruška, J.; Adão, T.; Peres, E.; Sousa, A.; Sousa, J.J. Digital reconstitution of road traffic accidents: A flexible methodology relying on uav surveying and complementary strategies to support multiple scenarios. Int. J. Environ. Res. Public Health 2020, 17, 1868. [Google Scholar] [CrossRef] [PubMed]
- Vergouw, B.; Nagel, H.; Bondt, G.; Custers, B. Drone technology: Types, payloads, applications, frequency spectrum issues and future developments. In The Future of Drone Use: Opportunities and Threats from Ethical and Legal Perspectives; Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–45. [Google Scholar]
- Liu, Z.; Zhang, Y.; Yuan, C.; Ciarletta, L.; Theilliol, D. Collision avoidance and path following control of unmanned aerial vehicle in hazardous environment. J. Intell. Robot. Syst. 2019, 95, 193–210. [Google Scholar] [CrossRef]
- Ait Saadi, A.; Soukane, A.; Meraihi, Y.; Benmessaoud Gabis, A.; Mirjalili, S.; Ramdane-Cherif, S. UAV path planning using optimization approaches: A survey. Archives of Computational Methods in Engineering. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Delamer, J.-A.; Watanabe, Y.; Chanel, C.P. Safe path planning for UAV urban operation under GNSS signal occlusion risk. Robot. Auton. Syst. 2021, 142, 103800. [Google Scholar] [CrossRef]
- Husnain, A.U.; Mokhtar, N.; Shah, N.M.; Dahari, M.; Iwahashi, M. A Systematic Literature Review (SLR) on Autonomous Path Planning of Unmanned Aerial Vehicles. Drones 2023, 7, 118. [Google Scholar] [CrossRef]
- Gugan, G.; Haque, A. Path Planning for Autonomous Drones: Challenges and Future Directions. Drones 2023, 7, 169. [Google Scholar] [CrossRef]
- Kitchenham, B.; Brereton, O.P.; Budgen, D.; Turner, M.; Bailey, J.; Linkman, S. Systematic literature reviews in software engineering—A systematic literature review. Inf. Softw. Technol. 2009, 51, 7–15. [Google Scholar] [CrossRef]
- Kitchenham, B.; Pfleeger, S.; Pickard, L.; Jones, P.; Hoaglin, D.; El Emam, K.; Rosenberg, J. Preliminary guidelines for empirical research in software engineering. IEEE Trans. Softw. Eng. 2002, 28, 721–734. [Google Scholar] [CrossRef]
- Webster, J.; Watson, R.T. Analyzing the past to prepare for the future: Writing a literature review. MIS Q. 2002, 26, xiii–xxiii. [Google Scholar]
- Yang, L.; Guo, J.; Liu, Y. Three-dimensional UAV cooperative path planning based on the MP-CGWO algorithm. Int. J. Innov. Comput. Inf. Control 2020, 16, 991–1006. [Google Scholar]
- Ma, Z.; Chen, J. Adaptive path planning method for UAVs in complex environments. Int. J. Appl. Earth Obs. Geoinf. 2022, 115, 103133. [Google Scholar] [CrossRef]
- Ahmed, N.; Pawase, C.J.; Chang, K. Distributed 3-D path planning for multi-UAVs with full area surveillance based on particle swarm optimization. Appl. Sci. 2021, 11, 3417. [Google Scholar] [CrossRef]
- Chen, Q.; Zhao, Q.; Zou, Z. Threat-Oriented Collaborative Path Planning of Unmanned Reconnaissance Mission for the Target Group. Aerospace 2022, 9, 577. [Google Scholar] [CrossRef]
- Wang, H.; Tan, L.; Shi, J.; Lv, X.; Lian, X. An Improved NSGA-II Algorithm for UAV Path Planning Problems. J. Internet Technol. 2021, 22, 583–592. [Google Scholar]
- Duan, C.-F.; Feng, J.; Chang, H.-T. Meteorology-aware path planning for the UAV based on the improved intelligent water drops algorithm. IEEE Access 2021, 9, 49844–49856. [Google Scholar] [CrossRef]
- Jamshidi, V.; Nekoukar, V.; Refan, M.H. Real time UAV path planning by parallel grey wolf optimization with align coefficient on CAN bus. Clust. Comput. 2021, 24, 2495–2509. [Google Scholar] [CrossRef]
- Zhou, Q.; Gao, S.; Qu, B.; Gao, X.; Zhong, Y. Crossover recombination-based global-best brain storm optimization algorithm for uav path planning. In Proceedings of the Romanian Academy Series a-Mathematics Physics Technical Sciences Information Science; 2022; Volume 23, pp. 207–216. [Google Scholar]
- Xu, C.; Xu, M.; Yin, C. Optimized multi-UAV cooperative path planning under the complex confrontation environment. Comput. Commun. 2020, 162, 196–203. [Google Scholar] [CrossRef]
- Zhou, X.; Gao, F.; Fang, X.; Lan, Z. Improved bat algorithm for UAV path planning in three-dimensional space. IEEE Access 2021, 9, 20100–20116. [Google Scholar] [CrossRef]
- Ait-Saadi, A.; Meraihi, Y.; Soukane, A.; Ramdane-Cherif, A.; Gabis, A.B. A novel hybrid chaotic aquila optimization algorithm with simulated annealing for unmanned aerial vehicles path planning. Comput. Electr. Eng. 2022, 104, 108461. [Google Scholar] [CrossRef]
- Jamshidi, V.; Nekoukar, V.; Refan, M.H. Analysis of parallel genetic algorithm and parallel particle swarm optimization algorithm UAV path planning on controller area network. J. Control. Autom. Electr. Syst. 2020, 31, 129–140. [Google Scholar] [CrossRef]
- Jarray, R.; Al-Dhaifallah, M.; Rezk, H.; Bouallègue, S. Path Planning of Quadrotors in a Dynamic Environment Using aMulticriteria Multi-Verse Optimizer. Comput. Mater. Contin. 2021, 69. [Google Scholar]
- Behjati, M.; Nordin, R.; Zulkifley, M.A.; Abdullah, N.F. 3D Global Path Planning Optimization for Cellular-Connected UAVs under Link Reliability Constraint. Sensors 2022, 22, 8957. [Google Scholar] [CrossRef]
- Huang, C.; Lan, Y.; Liu, Y.; Zhou, W.; Pei, H.; Yang, L.; Cheng, Y.; Hao, Y.; Peng, Y. A New dynamic path planning approach for unmanned aerial vehicles. Complexity 2018, 2018, 8420249. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Y.; Wu, D.; Zhang, Z.; Ma, X. Mission-oriented 3D path planning for high-altitude long-endurance solar-powered UAVs with optimal energy management. IEEE Access 2020, 8, 227629–227641. [Google Scholar] [CrossRef]
- Kumar, P.; Garg, S.; Singh, A.; Batra, S.; Kumar, N.; You, I. MVO-based 2-D path planning scheme for providing quality of service in UAV environment. IEEE Internet Things J. 2018, 5, 1698–1707. [Google Scholar] [CrossRef]
- Yao, J.; Sha, Y.; Chen, Y.; Zhang, G.; Hu, X.; Bai, G.; Liu, J. IHSSAO: An improved hybrid salp swarm algorithm and aquila optimizer for UAV path planning in complex terrain. Appl. Sci. 2022, 12, 5634. [Google Scholar] [CrossRef]
- Yu, Z.; Si, Z.; Li, X.; Wang, D.; Song, H. A novel hybrid particle swarm optimization algorithm for path planning of UAVs. IEEE Internet Things J. 2022, 9, 22547–22558. [Google Scholar] [CrossRef]
- Phung, M.D.; Ha, Q.P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]
- Belge, E.; Altan, A.; Hacıoğlu, R. Meta-heuristic Optimization-based path planning and tracking of quadcopter for payload hold-release mission. Electronics 2022, 11, 1208. [Google Scholar] [CrossRef]
- Zhang, D.; Duan, H. Social-class pigeon-inspired optimization and time stamp segmentation for multi-UAV cooperative path planning. Neurocomputing 2018, 313, 229–246. [Google Scholar] [CrossRef]
- Wu, J.; Wang, H.; Li, N.; Yao, P.; Huang, Y.; Yang, H. Path planning for solar-powered UAV in urban environment. Neurocomputing 2018, 275, 2055–2065. [Google Scholar] [CrossRef]
- Liu, H.; Ge, J.; Wang, Y.; Li, J.; Ding, K.; Zhang, Z.; Guo, Z.; Li, W.; Lan, J. Multi-UAV optimal mission assignment and path planning for disaster rescue using adaptive genetic algorithm and improved artificial bee colony method. Actuators 2021, 11, 4. [Google Scholar] [CrossRef]
- Ge, F.; Li, K.; Han, Y.; Xu, W.; Wang, Y. Path planning of UAV for oilfield inspections in a three-dimensional dynamic environment with moving obstacles based on an improved pigeon-inspired optimization algorithm. Appl. Intell. 2020, 50, 2800–2817. [Google Scholar] [CrossRef]
- Yang, Q.; Liu, J.; Li, L. Path planning of UAVs under dynamic environment based on a hierarchical recursive multiagent genetic algorithm. In Proceedings of the 2020 IEEE congress on evolutionary computation (CEC), Glasgow, UK, 19–24 July 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Golabi, M.; Ghambari, S.; Lepagnot, J.; Jourdan, L.; Brevilliers, M.; Idoumghar, L. Bypassing or flying above the obstacles? A novel multi-objective UAV path planning problem. In Proceedings of the 2020 IEEE Congress on Evolutionary Computation (CEC), Glasgow, UK, 19–24 July 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Li, K.; Ge, F.; Han, Y.; Wang, Y.; Xu, W. Path planning of multiple UAVs with online changing tasks by an ORPFOA algorithm. Eng. Appl. Artif. Intell. 2020, 94, 103807. [Google Scholar] [CrossRef]
- Fendji, J.L.E.K.; Bayaola, I.K.; Thron, C.; Fendji, M.D.; Förster, A. Cost-effective placement of recharging stations in drone path planning for surveillance missions on large farms. Symmetry 2020, 12, 1661. [Google Scholar] [CrossRef]
- Wu, Y.; Wu, S.; Hu, X. Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments. IEEE Internet Things J. 2020, 8, 4906–4919. [Google Scholar] [CrossRef]
- Yang, L.I.U.; Zhang, X.; Zhang, Y.; Xiangmin, G.U.A.N. Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach. Chin. J. Aeronaut. 2019, 32, 1504–1519. [Google Scholar]
- Joseph, J.; Radmanesh, M.; Sadat, M.N.; Dai, R.; Kumar, M. UAV path planning for data ferrying with communication constraints. In Proceedings of the 2020 IEEE 17th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Kiani, F.; Seyyedabbasi, A.; Nematzadeh, S.; Candan, F.; Çevik, T.; Anka, F.A.; Randazzo, G.; Lanza, S.; Muzirafuti, A. Adaptive meta-heuristic-based methods for autonomous robot path planning: Sustainable agricultural applications. Appl. Sci. 2022, 12, 943. [Google Scholar] [CrossRef]
- Zhang, X.; Xia, S.; Li, X. Quantum behavior-based enhanced fruit fly optimization algorithm with application to UAV path planning. Int. J. Comput. Intell. Syst. 2020, 13, 1315–1331. [Google Scholar] [CrossRef]
- Sun, X.; Cai, C.; Pan, S.; Zhang, Z.; Li, Q. A cooperative target search method based on intelligent water drops algorithm. Comput. Electr. Eng. 2019, 80, 106494. [Google Scholar] [CrossRef]
- Andrade, F.A.d.A.; Hovenburg, A.R.; de Lima, L.N.; Rodin, C.D.; Johansen, T.A.; Storvold, R.; Correia, C.A.M.; Haddad, D.B. Autonomous unmanned aerial vehicles in search and rescue missions using real-time cooperative model predictive control. Sensors 2019, 19, 4067. [Google Scholar] [CrossRef]
- Zheng, A.; Li, B.; Zheng, M.; Zhang, L. UAV Trajectory Planning Based on PH Curve Improved by Particle Swarm Optimization and Quasi-Newton Method. In Advanced Intelligent Technologies for Industry: Proceedings of 2nd International Conference on Advanced Intelligent Technologies (ICAIT 2021); Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Schellenberg, B.; Richardson, T.; Richards, A.; Clarke, R.; Watson, M. On-board real-time trajectory planning for fixed wing unmanned aerial vehicles in extreme environments. Sensors 2019, 19, 4085. [Google Scholar] [CrossRef] [PubMed]
- Radmanesh, M.; Kumar, M.; Sarim, M. Grey wolf optimization based sense and avoid algorithm in a Bayesian framework for multiple UAV path planning in an uncertain environment. Aerosp. Sci. Technol. 2018, 77, 168–179. [Google Scholar] [CrossRef]
- Zheng, Y.-J.; Du, Y.-C.; Ling, H.-F.; Sheng, W.-G.; Chen, S.-Y. Evolutionary collaborative human-UAV search for escaped criminals. IEEE Trans. Evol. Comput. 2019, 24, 217–231. [Google Scholar] [CrossRef]
- Battulwar, R.; Winkelmaier, G.; Valencia, J.; Naghadehi, M.Z.; Peik, B.; Abbasi, B.; Parvin, B.; Sattarvand, J. A practical methodology for generating high-resolution 3D models of open-pit slopes using UAVs: Flight path planning and optimization. Remote Sens. 2020, 12, 2283. [Google Scholar] [CrossRef]
- Shao, S.; Shi, W.; Zhao, Y.; Du, Y. A new method of solving UAV trajectory planning under obstacles and multi-constraint. IEEE Access 2021, 9, 161161–161180. [Google Scholar] [CrossRef]
- Shen, L.; Wang, Y.; Liu, K.; Yang, Z.; Shi, X.; Yang, X.; Jing, K. Synergistic path planning of multi-UAVs for air pollution detection of ships in ports. Transp. Res. Part E Logist. Transp. Rev. 2020, 144, 102128. [Google Scholar] [CrossRef]
- Chen, Y.; Shu, Y.; Hu, M.; Zhao, X. Multi-UAV Cooperative Path Planning with Monitoring Privacy Preservation. Appl. Sci. 2022, 12, 12111. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, Y.; Li, X. UCAV path planning for avoiding obstacles using cooperative co-evolution spider monkey optimization. Knowl.-Based Syst. 2022, 246, 108713. [Google Scholar] [CrossRef]
- Jarray, R.; Al-Dhaifallah, M.; Rezk, H.; Bouallègue, S. Parallel cooperative coevolutionary grey wolf optimizer for path planning problem of unmanned aerial vehicles. Sensors 2022, 22, 1826. [Google Scholar] [CrossRef] [PubMed]
- Wan, Y.; Zhong, Y.; Ma, A.; Zhang, L. An Accurate UAV 3-D path planning method for disaster emergency response based on an improved multiobjective swarm intelligence algorithm. IEEE Trans. Cybern. 2022, 53, 2658–2671. [Google Scholar] [CrossRef]
- Gao, M.; Liu, Y.; Wei, P. Opposite and chaos searching genetic algorithm based for uav path planning. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Jarray, R.; Bouallegue, S. Multi-Verse Algorithm based Approach for Multi-criteria Path Planning of Unmanned Aerial Vehicles. Int. J. Adv. Comput. Sci. Appl. 2020, 11. [Google Scholar] [CrossRef]
- Van Gijseghem, W.; Agarwal, U. Drone delivery multi-agent routing optimization. In AIAA Aviation 2020 Forum; ARC: Canberra, Australia, 2020. [Google Scholar]
- Belkadi, A.; Abaunza, H.; Ciarletta, L.; Castillo, P.; Theilliol, D. Design and implementation of distributed path planning algorithm for a fleet of UAVs. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2647–2657. [Google Scholar] [CrossRef]
- Choi, J.; Seo, M.-G.; Shin, H.-S.; Oh, H. Adversarial Swarm Defence Using Multiple Fixed-Wing Unmanned Aerial Vehicles. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 5204–5219. [Google Scholar] [CrossRef]
- Wei, Y.; Wang, B.; Liu, W.; Zhang, L. Hierarchical Task Assignment of Multiple UAVs with Improved Firefly Algorithm Based on Simulated Annealing Mechanism. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar]
- Zhang, R.; Li, X.; Ding, Y.; Ren, H. UAV path planning method based on modified white shark optimization. In Proceedings of the 2022 IEEE International Conference on Unmanned Systems (ICUS), Guangzhou, China, 28–30 October 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Huo, L.; Zhu, J.; Wu, G.; Li, Z. A novel simulated annealing based strategy for balanced UAV task assignment and path planning. Sensors 2020, 20, 4769. [Google Scholar] [CrossRef] [PubMed]
- Tang, A.-D.; Han, T.; Zhou, H.; Xie, L. An improved equilibrium optimizer with application in unmanned aerial vehicle path planning. Sensors 2021, 21, 1814. [Google Scholar] [CrossRef] [PubMed]
- Wu, M.; Chen, W.; Tian, X. Optimal energy consumption path planning for quadrotor uav transmission tower inspection based on simulated annealing algorithm. Energies 2022, 15, 8036. [Google Scholar] [CrossRef]
- Jain, G.; Yadav, G.; Prakash, D.; Shukla, A.; Tiwari, R. MVO-based path planning scheme with coordination of UAVs in 3-D environment. J. Comput. Sci. 2019, 37, 101016. [Google Scholar] [CrossRef]
- Fu, Z.; Chen, Y.; Ding, Y.; He, D. Pollution source localization based on multi-UAV cooperative communication. IEEE Access 2019, 7, 29304–29312. [Google Scholar] [CrossRef]
- Zhang, R.; Li, S.; Ding, Y.; Qin, X.; Xia, Q. UAV Path Planning Algorithm Based on Improved Harris Hawks Optimization. Sensors 2022, 22, 5232. [Google Scholar] [CrossRef] [PubMed]
- Hovenburg, A.R.; Andrade, F.A.d.A.; Hann, R.; Rodin, C.D.; Johansen, T.A.; Storvold, R. Long-range path planning using an aircraft performance model for battery-powered suas equipped with icing protection system. IEEE J. Miniaturization Air Space Syst. 2020, 1, 76–89. [Google Scholar] [CrossRef]
- Can, Ü.; Alataş, B. Physics based meta-heuristic algorithms for global optimization. Am. J. Inf. Sci. Comput. Eng. 2015, 1, 94–106. [Google Scholar]
- Bäck, T.; Schwefel, H.-P. An overview of evolutionary algorithms for parameter optimization. Evol. Comput. 1993, 1, 1–23. [Google Scholar] [CrossRef]
- Vikhar, P.A. Evolutionary algorithms: A critical review and its future prospects. In Proceedings of the 2016 International conference on global trends in signal processing, information computing and communication (ICGTSPICC), Jalgaon, India, 22–24 December 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Saka, M.P.; Doğan, E.; Aydogdu, I. Analysis of swarm intelligence–based algorithms for constrained optimization. In Swarm Intelligence and Bio-Inspired Computation; Elsevier: Amsterdam, The Netherlands, 2013; pp. 25–48. [Google Scholar]
- Game, P.S.; Vaze, D.V. Bio-inspired Optimization: Meta-heuristic algorithms for optimization. arXiv 2020, arXiv:2003.11637. [Google Scholar]
- Yang, X.-S. Swarm-based meta-heuristic algorithms and no-free-lunch theorems. In Theory and New Applications of Swarm Intelligence; IntechOpen: London, UK, 2012. [Google Scholar]
- Ab Wahab, M.N.; Nefti-Meziani, S.; Atyabi, A. A comprehensive review of swarm optimization algorithms. PLoS ONE 2015, 10, e0122827. [Google Scholar] [CrossRef] [PubMed]
- Rudnick-Cohen, E.; Azarm, S.; Herrmann, J.W. Planning unmanned aerial system (uas) takeoff trajectories to minimize third-party risk. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Database | Boolean/Phrase |
|---|---|
| ACM | (UAV OR “unmanned aerial vehicle” OR drone) AND (“path planning”) AND (“optimization”) |
| Web of Science | (UAV OR “unmanned aerial vehicle” OR drone) AND (“path plan *”) AND (“optim *”) |
| IEEE | (UAV OR “unmanned aerial vehicle” OR drone) AND (“path planning”) AND (“optimization”) |
| Scopus | TITLE-ABS-KEY((UAV OR “unmanned aerial vehicle” OR drone) AND (“path planning”) AND (“optimization”)) |
| ScienceDirect | (UAV OR “unmanned aerial vehicle” OR drone) AND (“path planning”) AND (“optimization”) |
| Google Scholar | (UAV OR “unmanned aerial vehicle” OR drone) AND (“path planning”) AND (“optimization”) |
| Inclusion Criteria | |
|---|---|
| IC1 | Articles published between 2018 to 2023 |
| IC2 | Articles including conference publications or from peer-reviewed journals |
| IC3 | In English and accessible |
| IC4 | The study revolves around the use/development of optimization methods for UAV path planning |
| Exclusion criteria | |
| EC1 | Studies using other types of algorithms for path planning (e.g., machine learning) |
| EC2 | Articles that do not propose a new method of path planning |
| EC3 | Conference publications that were not part of the main conference (e.g., workshop papers), editorial reports, etc. |
| EC4 | Articles for which more than one version of the study was published in different venues (reporting identical results) |
| EC5 | Articles whose context was not properly in line with objectives and experiments |
| EC6 | Articles suffering from issues in formulations or data collection |
| Article ID | Ref. | Title | Proposed Algorithm | Meta-Heuristic-Type |
|---|---|---|---|---|
| 1 | [32] | Three-dimensional UAV cooperative path planning based on the MP-CGWO algorithm | MP-CGWO | Hybrid |
| 2 | [33] | Adaptive path planning method for UAVs in complex environments | APP-PSO | Hybrid |
| 3 | [34] | Distributed 3-D path planning for multi-UAVs with full area surveillance based on particle swarm optimization | mPSO | Swarm-based algorithm |
| 4 | [35] | Threat-oriented collaborative path planning of unmanned reconnaissance mission for the target group | Improved NSGA-II | Evolutionary algorithm |
| 5 | [36] | An improved NSGA-II algorithm for UAV path planning problems | Improved NSGA-II | Evolutionary algorithm |
| 6 | [7] | A novel path planning optimization algorithm based on particle swarm optimization for UAVs for bird monitoring and repelling | PSO | Swarm-based algorithm |
| 7 | [37] | Meteorology-aware path planning for the UAV based on the improved intelligent water drops algorithm | IIWD | Swarm-based algorithm |
| 8 | [38] | Real time UAV path planning by parallel grey wolf optimization with align coefficient on CAN bus | IGWO | Swarm-based algorithm |
| 9 | [39] | Crossover recombination-based global-best brain storm optimization algorithm for UAV path planning | GBSO-CR | Hybrid |
| 10 | [17] | Autonomous UAV path planning optimization using meta-heuristic approach for pre-disaster assessment | DGBCO | Hybrid |
| 11 | [40] | Optimized multi-UAV cooperative path planning under the complex confrontation environment | IGWO | Swarm-based algorithm |
| 12 | [41] | Improved bat algorithm for UAV path planning in three-dimensional space | IBA | Hybrid |
| 13 | [42] | A novel hybrid chaotic aquila optimization algorithm with simulated annealing for unmanned aerial vehicles path planning | CAOSA | Hybrid |
| 14 | [43] | Analysis of parallel genetic algorithm and parallel particle swarm optimization algorithm UAV path planning on controller area network | Multi-master parallel GA | Evolutionary algorithm |
| 15 | [44] | Path planning of quadrotors in a dynamic environment using a multi-criteria multi-verse optimizer | MOMVO | Physics-based techniques |
| 16 | [45] | 3D global path planning optimization for cellular-connected UAVs under link reliability constraint | PSO-GA | Hybrid |
| 17 | [46] | A new dynamic path planning approach for unmanned aerial vehicles | ACO-APF | Hybrid |
| 18 | [47] | Mission-oriented 3D path planning for high-altitude long-endurance solar-powered UAVs with optimal energy management | GPM-ACO | Hybrid |
| 19 | [48] | MVO-based 2-D path planning scheme for providing quality of service in UAV environment | MVO | Physics-based techniques |
| 20 | [49] | IHSSAO: An Improved Hybrid salp swarm algorithm and Aquila optimizer for UAV path planning in complex terrain | IHSSAO | Hybrid |
| 21 | [50] | A novel hybrid particle swarm optimization algorithm for path planning of UAVs | SDPSO | Hybrid |
| 22 | [51] | Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization | Spherical vector- based with (PSO) | Hybrid |
| 23 | [52] | Meta-heuristic optimization-based path planning and tracking of quadcopter for payload hold-release mission | HHO-GWO | Hybrid |
| 24 | [53] | Social-class pigeon-inspired optimization and time stamp segmentation for multi-UAV cooperative path planning | SCPIO | Hybrid |
| 25 | [54] | Path planning for solar-powered UAV in urban environment | IWOA | Swarm-based algorithm |
| 26 | [55] | Multi-UAV optimal mission assignment and path planning for disaster rescue using adaptive genetic algorithm and improved artificial bee colony method | AGA-PSO and AGA-APFA and GA + APFA and GA + PSO | Hybrid |
| 27 | [56] | Path planning of UAV for oilfield inspections in a three- dimensional dynamic environment with moving obstacles based on an improved pigeon-inspired optimization algorithm | PIOFOA | Hybrid |
| 28 | [57] | Path planning of UAVs under dynamic environment based on a hierarchical recursive multi-agent genetic algorithm | HR-MAGA | Hybrid |
| 29 | [58] | Bypassing or flying above the obstacles? A novel multi- objective UAV path planning problem | NSGA-II | Evolutionary algorithm |
| 30 | [59] | Path planning of multiple UAVs with online changing tasks by an ORPFOA algorithm | ORPFOA | Swarm-based algorithm |
| 31 | [60] | Cost-effective placement of recharging stations in drone path planning for surveillance missions on large farms | BFKSA | Hybrid |
| 32 | [8] | An intelligent UAV path planning optimization method for monitoring the risk of unattended offshore oil platforms | NSGA-II | Evolutionary algorithm |
| 33 | [61] | Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments | EDA-GA | Hybrid |
| 34 | [62] | Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach | SRVM | Swarm-based algorithm |
| 35 | [63] | UAV path planning for data ferrying with communication constraints | GA | Evolutionary algorithm |
| 36 | [64] | Adaptive meta-heuristic-based methods for autonomous robot path planning: sustainable agricultural applications | I-GWO | Swarm-based algorithm |
| 37 | [11] | UAVs path planning architecture for effective medical emergency response in future networks | CVRP | Hybrid |
| 38 | [65] | Quantum behavior-based enhanced fruit fly optimization algorithm with application to UAV path planning | QFOA | Hybrid |
| 39 | [66] | A cooperative target search method based on intelligent water drops algorithm | LMIWD | Hybrid |
| 40 | [67] | Autonomous unmanned aerial vehicles in search and rescue missions using real-time cooperative model predictive control | PSO | Swarm-based algorithm |
| 41 | [12] | A grey wolf optimizer using gaussian estimation of distribution and its application in the multi-UAV multi-target urban tracking problem | GEDGWO | Hybrid |
| 42 | [68] | UAV trajectory planning based on PH curve improved by particle swarm optimization and quasi-newton method | PSO and Quasi–Newton Method | Hybrid |
| 43 | [69] | On-board real-time trajectory planning for fixed wing unmanned aerial vehicles in extreme environments | RTTP base GA | Evolutionary algorithm |
| 44 | [70] | Grey wolf optimization based sense and avoid algorithm in a bayesian framework for multiple UAV path planning in an uncertain environment | GWO | Swarm-based algorithm |
| 45 | [71] | Evolutionary collaborative human-UAV search for escaped criminals | HEA | Hybrid |
| 46 | [72] | A practical methodology for generating high-resolution 3D models of Open-Pit slopes using UAVs: flight path planning and optimization | GA | Evolutionary algorithm |
| 47 | [73] | A new method of solving UAV trajectory planning under obstacles and multi-constraint | PSO | Swarm-based algorithm |
| 48 | [74] | Synergistic path planning of multi-UAVs for air pollution detection of ships in ports | PSO | Swarm-based algorithm |
| 49 | [75] | Multi-UAV cooperative path planning with monitoring privacy preservation | OMACO | Hybrid |
| 50 | [76] | UCAV path planning for avoiding obstacles using cooperative co-evolution spider monkey optimization | CESMO | Hybrid |
| 51 | [77] | Parallel cooperative co-evolutionary grey wolf optimizer for path planning problem of unmanned aerial vehicles | PCCGWO | Hybrid |
| 52 | [78] | An accurate UAV 3-D path planning method for disaster emergency response based on an improved multi-objective swarm intelligence algorithm | APPMS | Swarm-based algorithm |
| 53 | [5] | UAV based spatiotemporal analysis of the 2019–2020 new South Wales bushfires | PSO | Swarm-based algorithm |
| 54 | [79] | Opposite and chaos searching genetic algorithm based for UAV path planning | OCGA | Hybrid |
| 55 | [80] | Multi-Verse algorithm based approach for multi-criteria path planning of unmanned aerial vehicles | MOMVO | Physics-based algorithm |
| 56 | [81] | Drone delivery multi-agent routing optimization | SA | Physics-based algorithm |
| 57 | [82] | Design and implementation of distributed path planning algorithm for a fleet of UAVs | PSO | Swarm-based algorithm |
| 58 | [83] | Adversarial swarm defence using multiple fixed-wing unmanned aerial vehicles | Adversarial swarm defense algorithm | Swarm-based algorithm |
| 59 | [84] | Hierarchical task assignment of multiple UAVs with improved firefly algorithm based on simulated annealing mechanism | SA-DFA | Hybrid |
| 60 | [85] | UAV path planning method based on modified white shark optimization | MWSO | Swarm-based algorithm |
| 61 | [86] | A novel simulated annealing based strategy for balanced UAV task assignment and path planning | SJSA | Physics-based algorithm |
| 62 | [87] | An improved equilibrium optimizer with application in unmanned aerial vehicle path planning | MHEO | Hybrid |
| 63 | [88] | Optimal energy consumption path planning for quadrotor UAV transmission tower inspection based on simulated annealing algorithm | SA | Physics-based algorithm |
| 64 | [89] | MVO-based path planning scheme with coordination of UAVs in 3-D environment | MVO | Physics-based algorithm |
| 65 | [90] | Pollution source localization based on multi-UAV cooperative communication | APF-PSO | Hybrid |
| 66 | [6] | A knee-guided differential evolution algorithm for unmanned aerial vehicle path planning in disaster management | DEAKP | evolutionary algorithm |
| 67 | [91] | UAV path planning algorithm based on improved Harris Hawks optimization | Improved HHO | Hybrid |
| 68 | [92] | Long-range path planning using an aircraft performance model for battery-powered sUAS equipped with icing protection system | PSO | Swarm-based algorithm |
| Algorithm-Type | Number of Articles | Article ID of Table 3 |
|---|---|---|
| Swarm-based algorithm | 19 | 3, 6, 7, 8, 11, 25, 30, 34, 36, 40, 44, 47, 48, 52, 53, 57, 58, 60, 68 |
| Evolutionary algorithm | 9 | 4, 5, 14, 29, 32, 35, 43, 46, 66 |
| Physics-based algorithm | 7 | 15, 19, 55, 56, 61, 63,64 |
| Hybrid | 33 | 1, 2, 9, 10, 12, 13, 16, 17, 18, 20, 21, 22, 23, 24, 26, 27,28, 31, 33, 37, 38, 39, 41, 42, 45, 49, 50, 51, 54, 59, 62, 65, 67 |
| Objectives | Number of Articles | Article ID in Table 3 |
|---|---|---|
| Path length/distance | 62 | 1, 2, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 32, 33, 34, 35, 36, 37, 38, 40, 41, 42, 43, 44, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68 |
| Time | 65 | 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 23, 24, 25, 26, 27, 28, 30, 31, 32, 33, 34, 35, 36, 37, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 67, 68 |
| Energy | 36 | 1, 3, 4, 6, 7, 8, 9, 10, 11, 12, 13, 14, 16, 17, 18, 23, 25, 26, 27, 29, 30, 31, 34, 35, 36, 42, 43, 46, 48, 50, 56, 58, 62, 63, 67, 68 |
| Cost | 54 | 1, 2, 3, 4, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 19, 20, 21, 22, 24, 25, 26, 27, 28, 30, 31, 34, 35, 36, 37, 38, 40, 41, 42, 43, 44, 47, 48, 49, 50, 51, 53, 54, 55, 56, 57, 58, 59, 62, 64, 65, 66, 67, 68 |
| Collision avoidance | 51 | 1, 2, 3, 5, 6, 7, 8, 9, 10, 13, 14, 15, 16, 17, 19, 20, 22, 23, 24, 25, 27, 28,29, 30, 32, 33, 34, 36, 39, 40, 41, 43, 44, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 60, 63, 64, 65, 66, 67, 68 |
| Constraint Items | Number of Articles | Article ID in Table 3 |
|---|---|---|
| Angle | 41 | 1, 2, 3, 6, 7, 8, 9, 12, 13, 14, 15, 16, 18, 20, 21, 22, 23, 24, 25, 28, 31, 32, 34, 38, 39, 40, 41, 43, 44, 46, 47, 50, 51, 52, 55, 58, 62, 63, 66, 67, 68 |
| UAV’s axes | 33 | 1, 6, 8, 9, 11, 12, 13, 14, 15, 16, 17, 18, 20, 21, 22, 23, 25, 30, 33, 34, 38, 41, 44, 47, 49, 50, 51, 53, 55, 61, 65, 66, 68 |
| Altitude | 40 | 1, 2, 5, 6, 7, 8, 9, 11, 12,13, 14, 15, 16, 18, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 38, 40, 41, 43, 46, 47, 52, 62, 66, 67, 68 |
| Risk | 11 | 3, 5, 7, 9, 29, 32, 34, 36, 38, 44, 66 |
| Threat | 34 | 1, 2, 3, 4, 5, 8, 9, 11, 12, 13, 14, 17, 19, 20, 21, 22, 24, 26, 32, 34, 38, 41, 42, 44, 47, 50, 51, 52, 54, 55, 60, 62, 66, 67 |
| Obstacle | 39 | 1, 2, 5, 9, 10, 12, 13, 15, 16, 17, 19, 21, 22, 23, 24, 25, 27, 29, 30, 33, 34, 36, 41, 42, 43, 44, 47, 50, 51, 53, 54, 55, 56, 60, 62, 64, 65, 66, 67 |
| Velocity | 42 | 1, 2, 3, 4, 6, 7, 8, 11, 12, 14, 15, 16, 18, 19, 21, 22, 23, 24, 25, 27, 29, 31, 34, 38, 39, 40, 41, 42, 43, 45, 46, 47, 48, 49, 50, 56, 57, 58, 59, 60, 65, 58 |
| Mathematical Type | Number of Articles | Article ID in Table 3 |
|---|---|---|
| Linear | 25 | 4, 10, 14, 28, 29, 30, 32, 33, 35, 36, 37, 39, 43, 44, 45, 46, 48, 50, 51, 53, 56, 61, 63, 64, 66 |
| Nonlinear | 43 | 1, 2, 3, 5, 6, 7, 8, 9, 11, 12, 13, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 31, 34, 38, 40, 41, 42, 47, 49, 52, 54, 55, 57, 58, 59, 60, 62, 65, 67, 68 |
| Environment Type | Number of Articles | Article ID in Table 3 |
|---|---|---|
| Dynamic | 37 | 1, 2, 3, 5, 6, 8, 9, 14, 15, 18, 19, 21, 23, 24, 25, 27, 28, 34, 37, 40, 41, 42, 43, 44, 45, 46, 47, 48, 50, 53, 56, 57, 58, 60, 64, 65, 68 |
| Static | 26 | 4, 11,12, 13, 20, 22, 26, 29, 30, 31, 32, 33, 35, 36, 38, 39, 49, 51, 52, 54, 59, 61, 62, 63, 66, 67 |
| Dynamic and Static | 5 | 7, 10, 16, 17, 55 |
| Environment Dimension | Number of Articles | Article ID in Table 3 |
|---|---|---|
| 2D | 19 | 4, 7, 10, 17, 19, 25, 31, 35, 37, 39, 40, 42, 48, 49, 50, 53, 56, 58, 59 |
| 3D | 43 | 1, 2, 6, 8, 9, 11, 12, 13, 14, 15, 16, 18, 20, 21, 22, 23, 24, 26, 27, 28, 29, 30, 32, 33, 36, 38, 41, 43, 44, 45, 46, 47, 52, 55, 60, 61, 62, 63, 64, 65, 66, 67, 68 |
| 2D and 3D | 5 | 3, 5, 51, 54, 57 |
| 4D | 1 | 34 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hooshyar, M.; Huang, Y.-M. Meta-heuristic Algorithms in UAV Path Planning Optimization: A Systematic Review (2018–2022). Drones 2023, 7, 687. https://doi.org/10.3390/drones7120687
Hooshyar M, Huang Y-M. Meta-heuristic Algorithms in UAV Path Planning Optimization: A Systematic Review (2018–2022). Drones. 2023; 7(12):687. https://doi.org/10.3390/drones7120687
Chicago/Turabian StyleHooshyar, Maral, and Yueh-Min Huang. 2023. "Meta-heuristic Algorithms in UAV Path Planning Optimization: A Systematic Review (2018–2022)" Drones 7, no. 12: 687. https://doi.org/10.3390/drones7120687
APA StyleHooshyar, M., & Huang, Y.-M. (2023). Meta-heuristic Algorithms in UAV Path Planning Optimization: A Systematic Review (2018–2022). Drones, 7(12), 687. https://doi.org/10.3390/drones7120687