



Vehicle-to-Vehicle Based Autonomous Flight Coordination Control System for Safer Operation of Unmanned Aerial Vehicles


Abstract
:1. Introduction
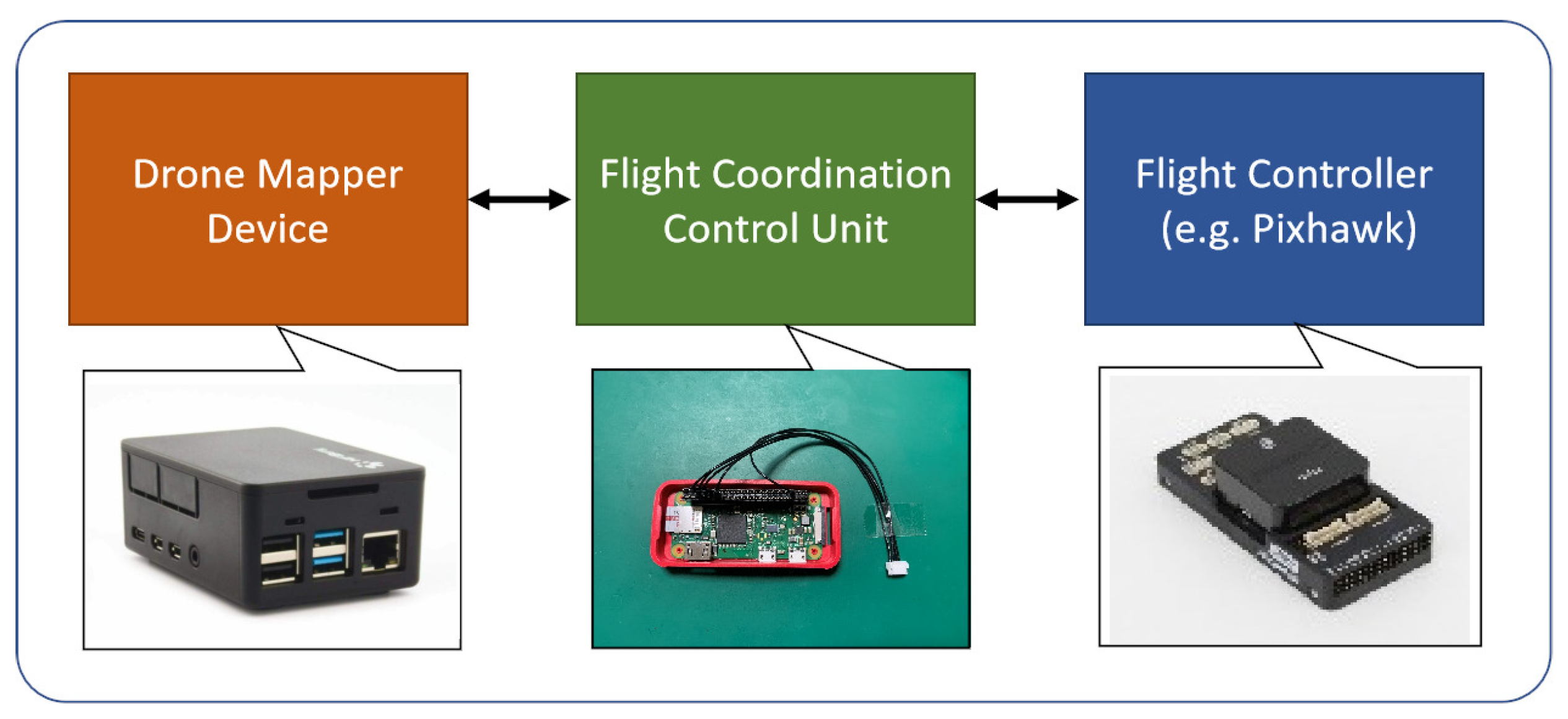
2. System Description
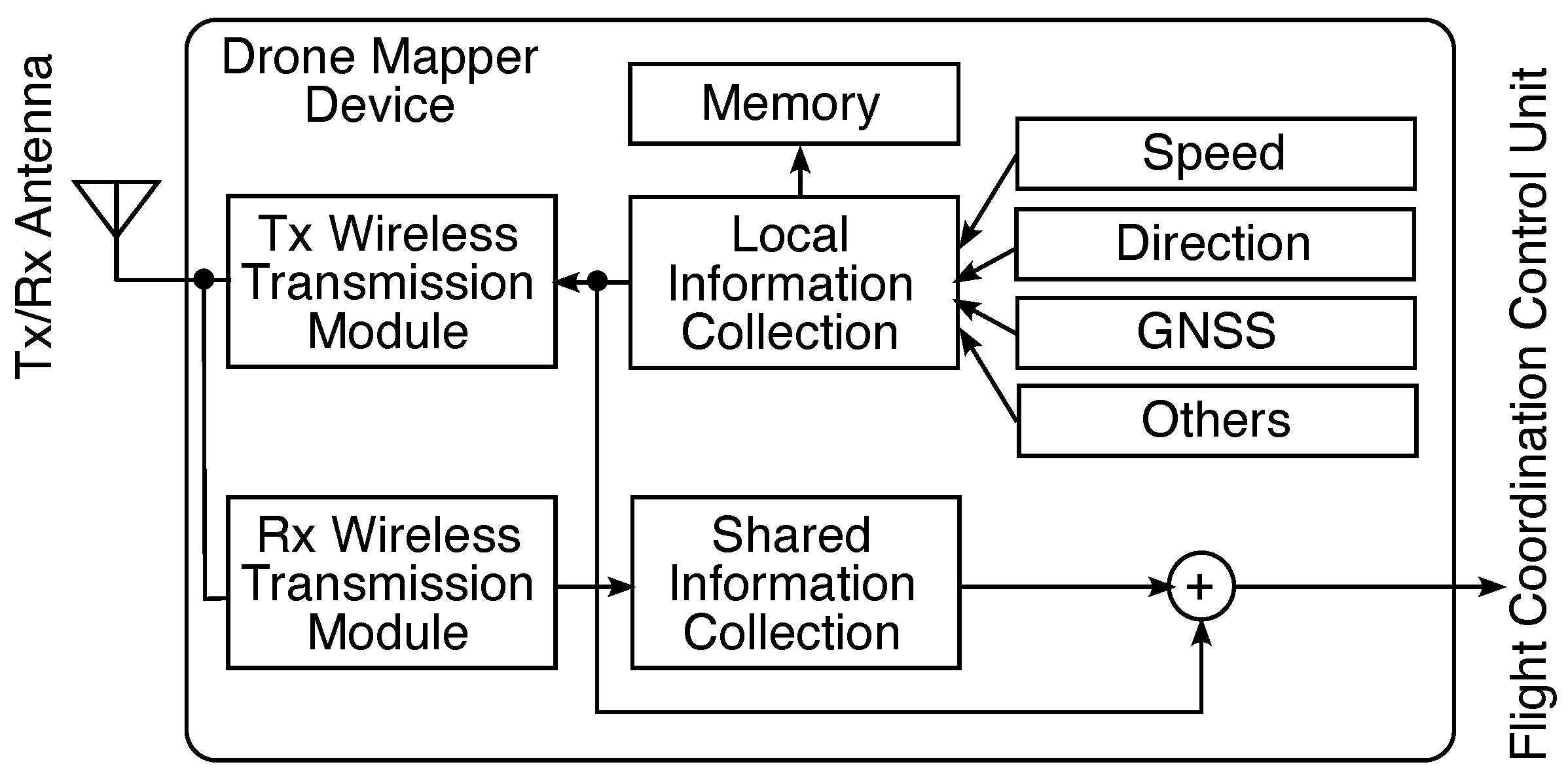
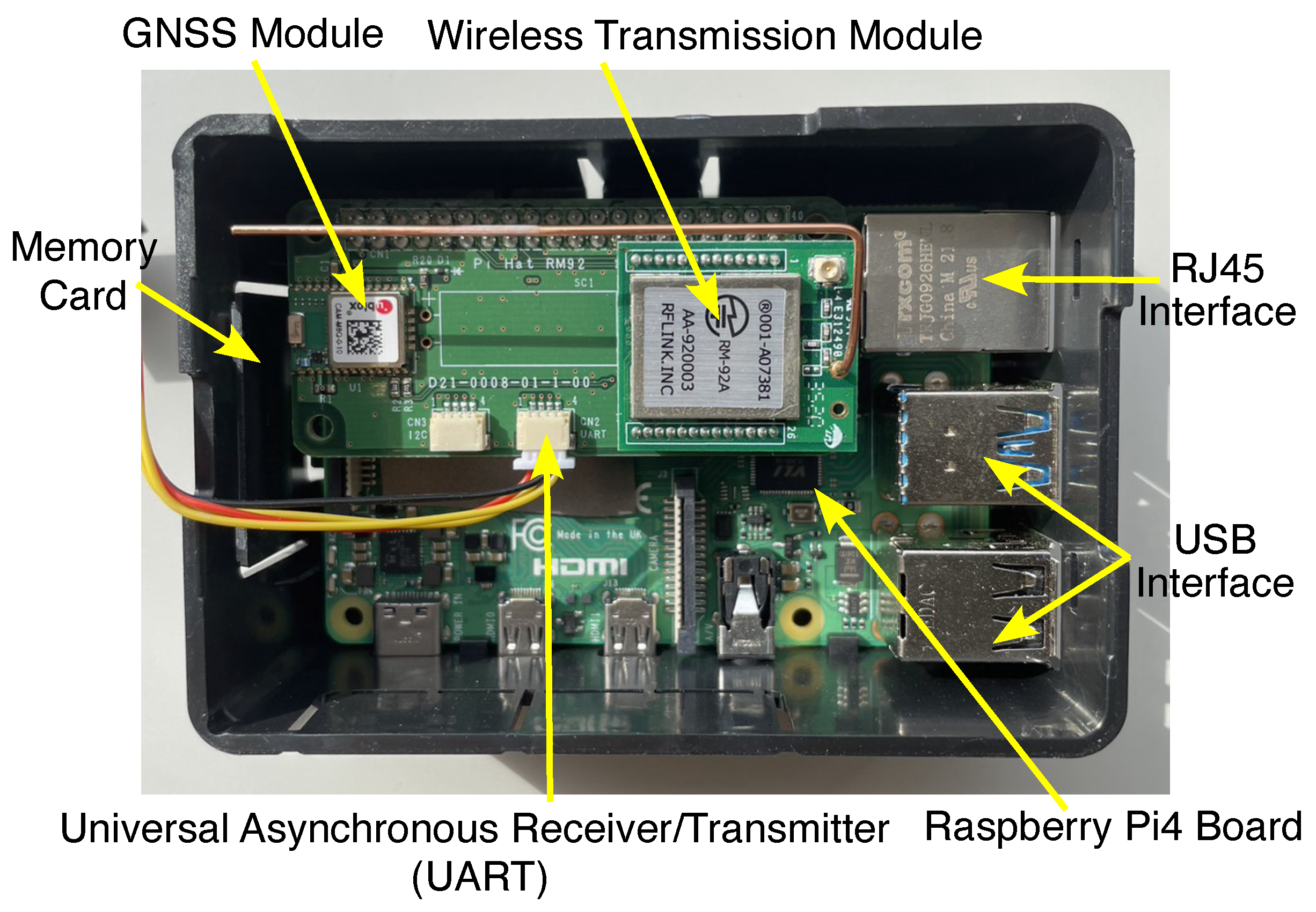
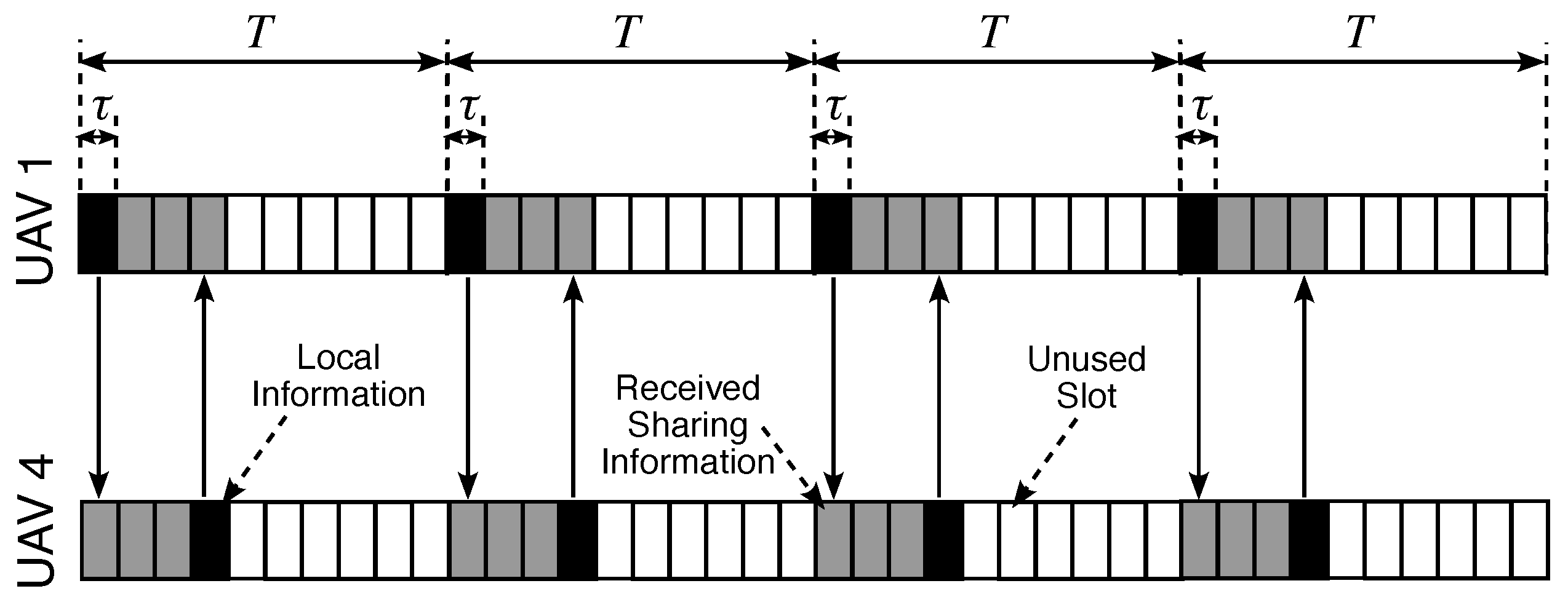
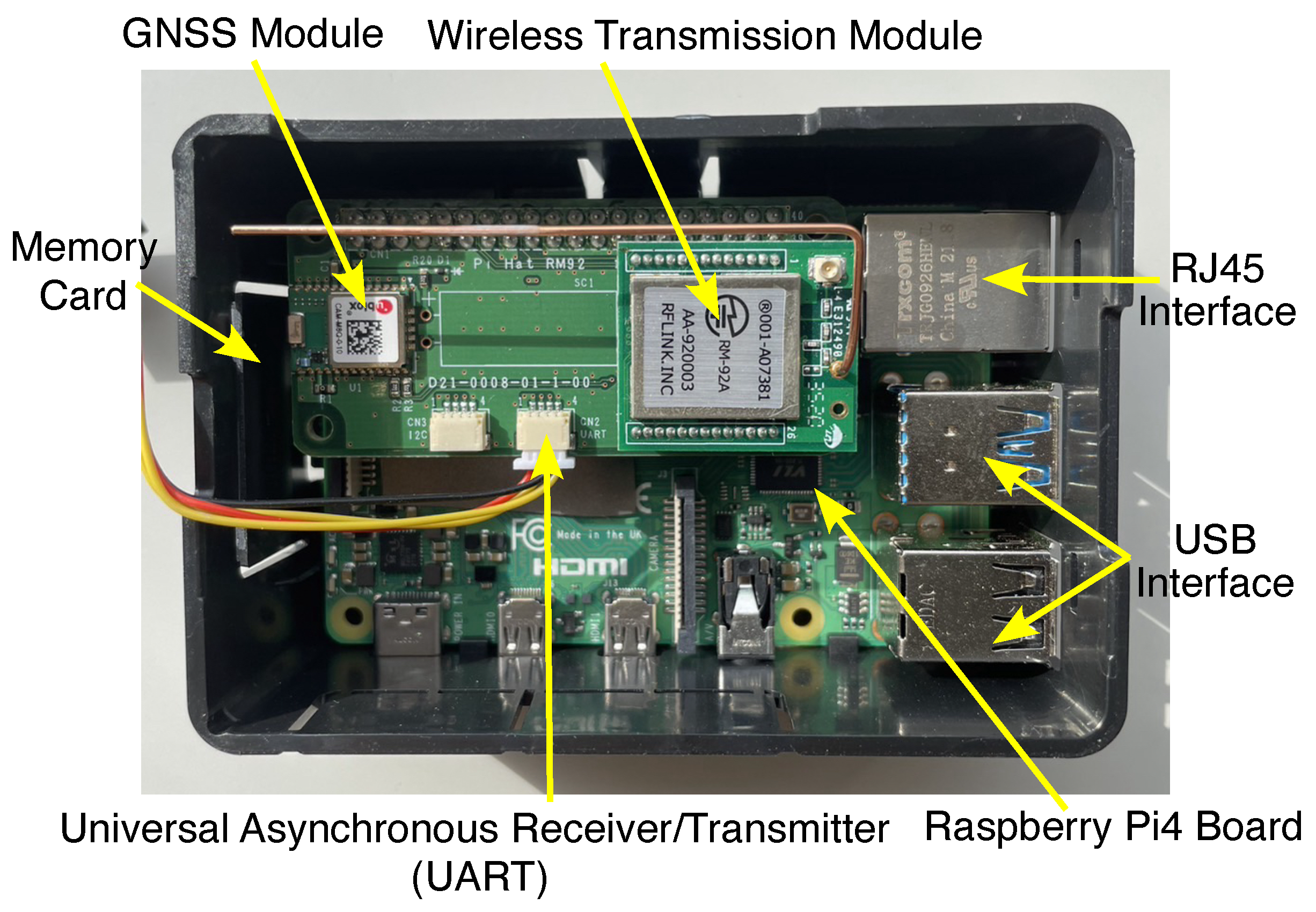
2.1. Data Collection and Transmission Unit (Drone Mapper Device)
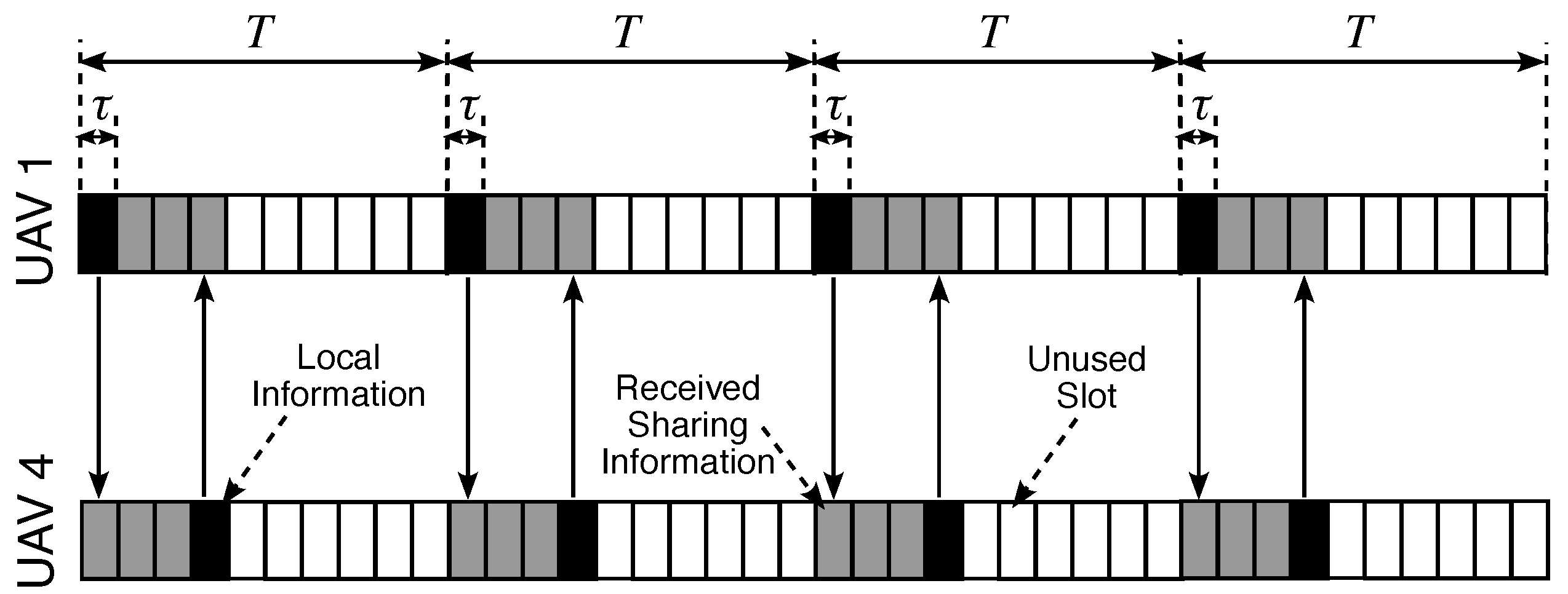
2.2. Flight Coordination Control Unit
2.3. Flight Controller
3. Flight Coordination Control Methods
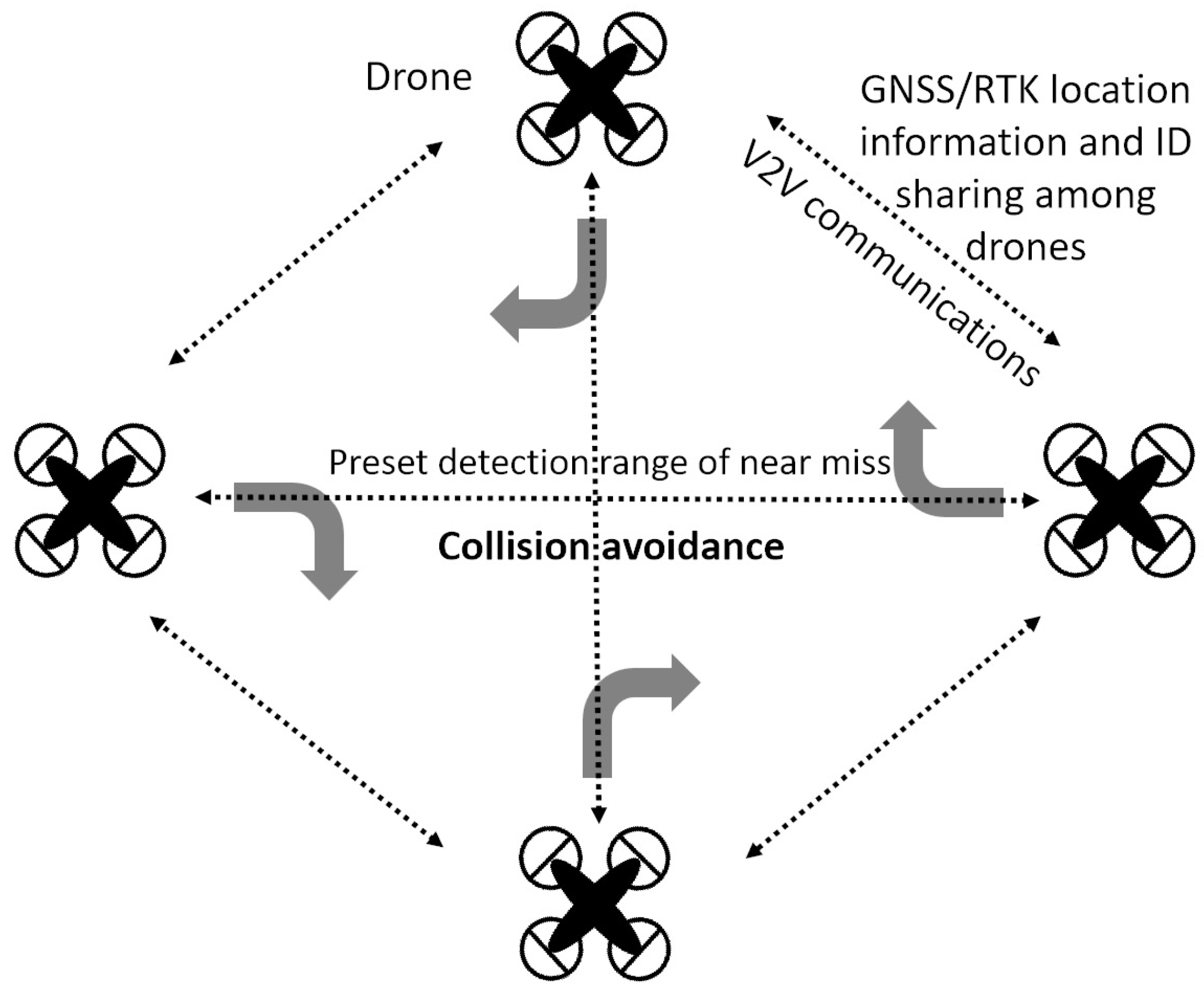
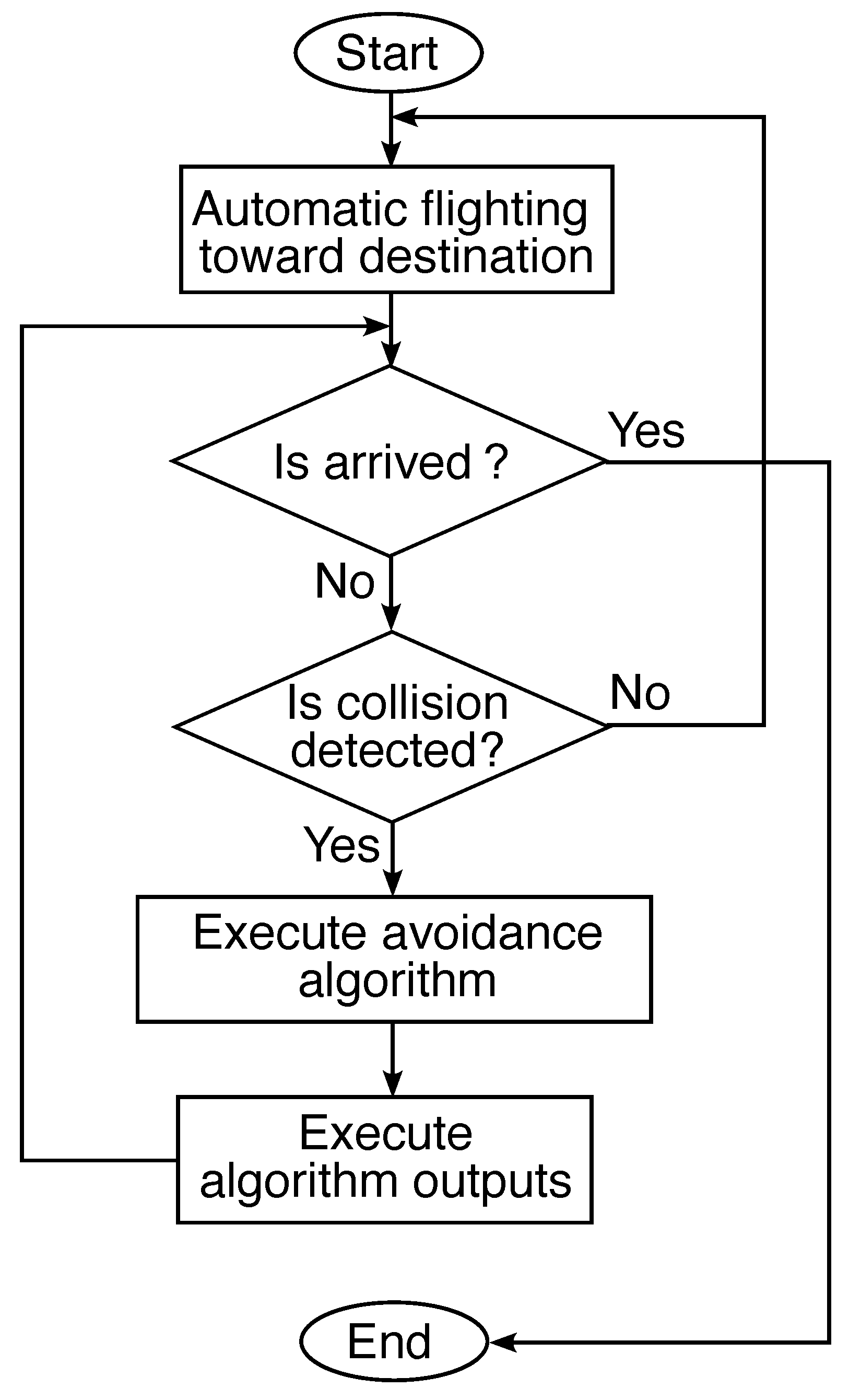
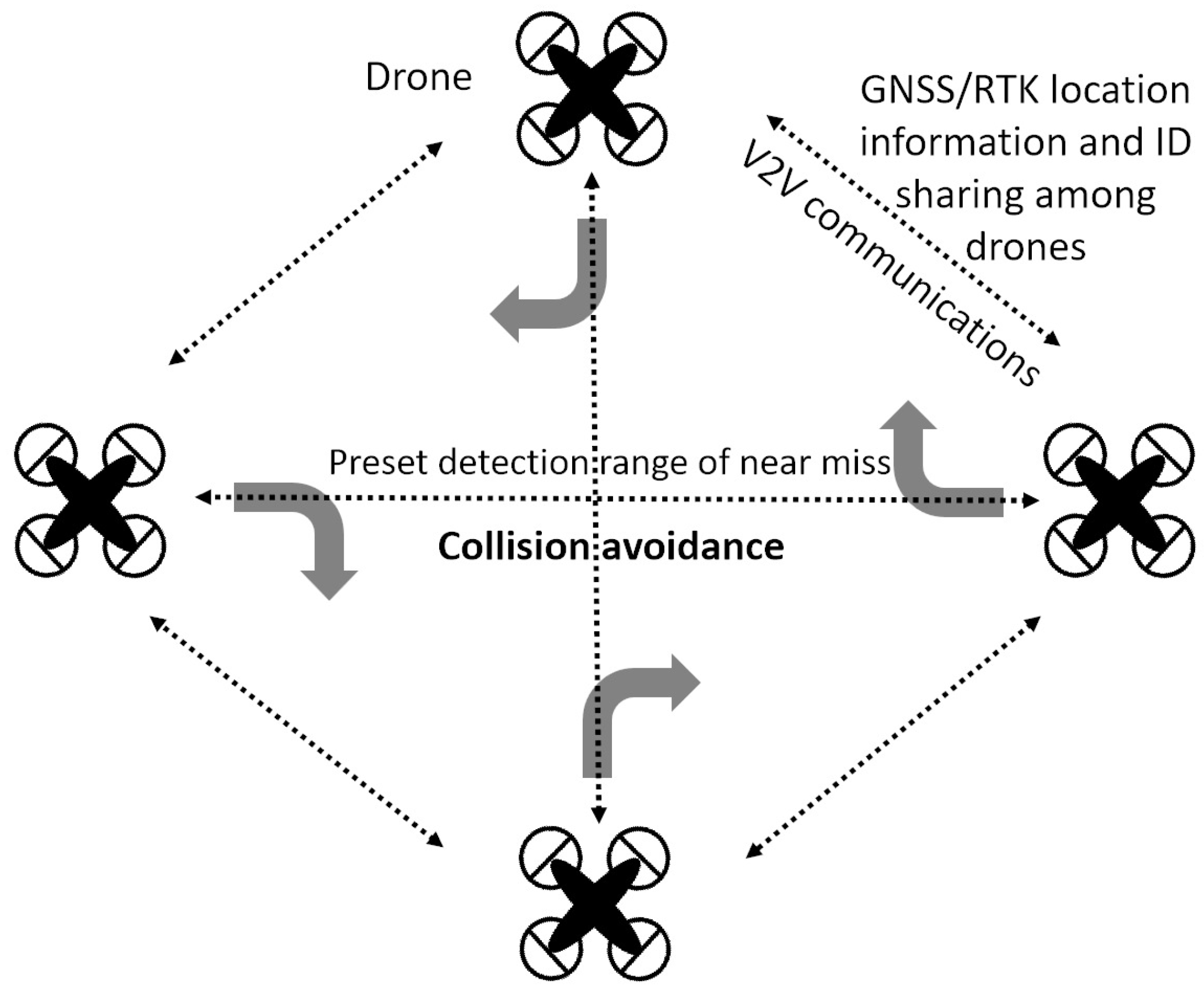
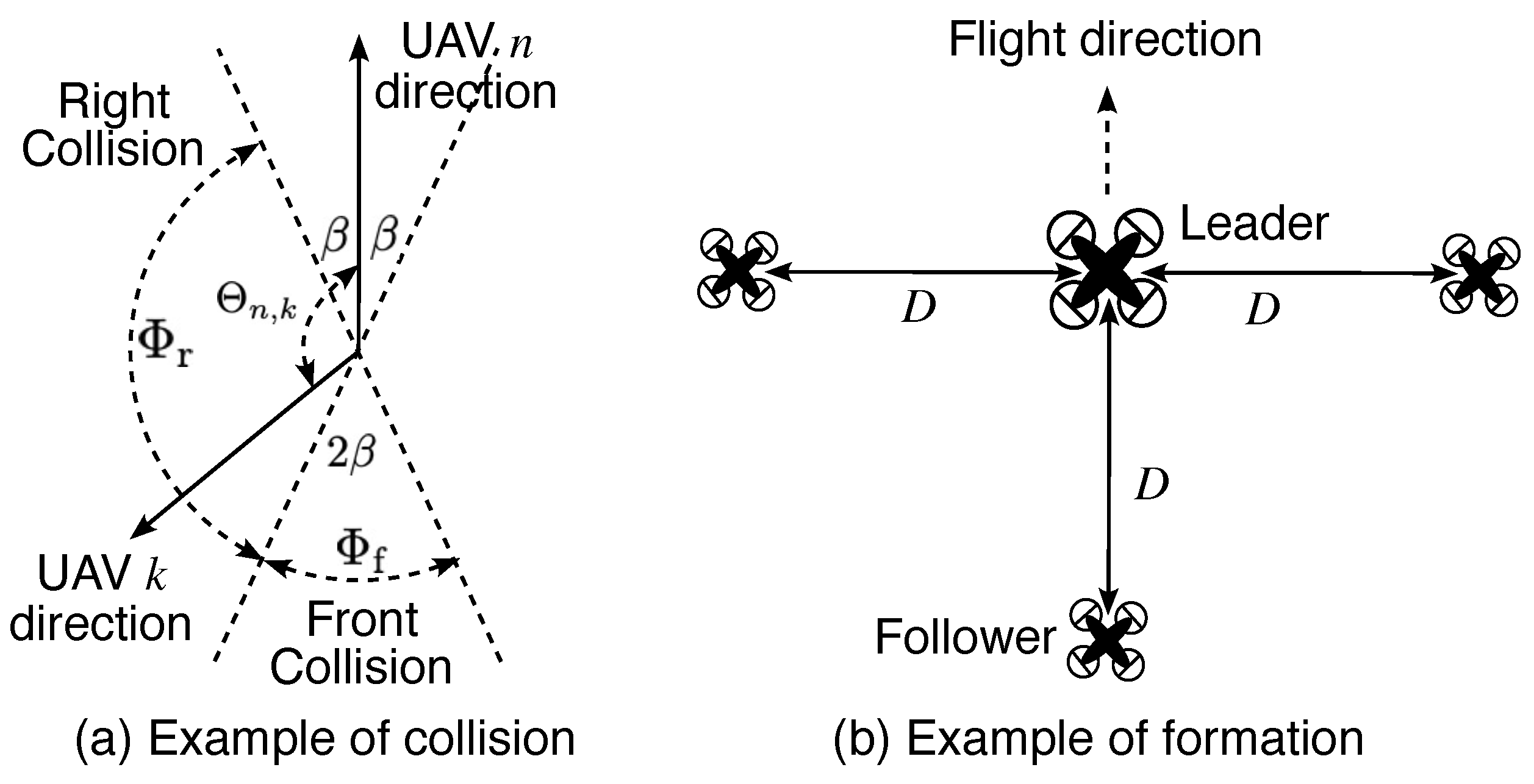
3.1. Collision Detection and Avoidance Method
| Algorithm 1: Collision-avoidance algorithm |
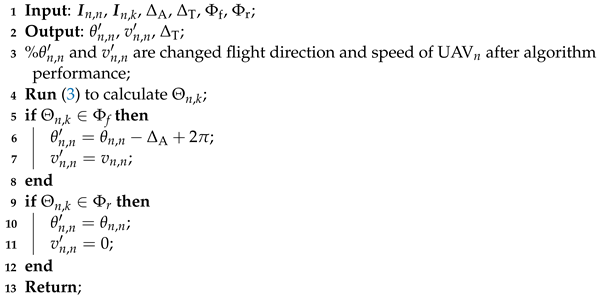 |
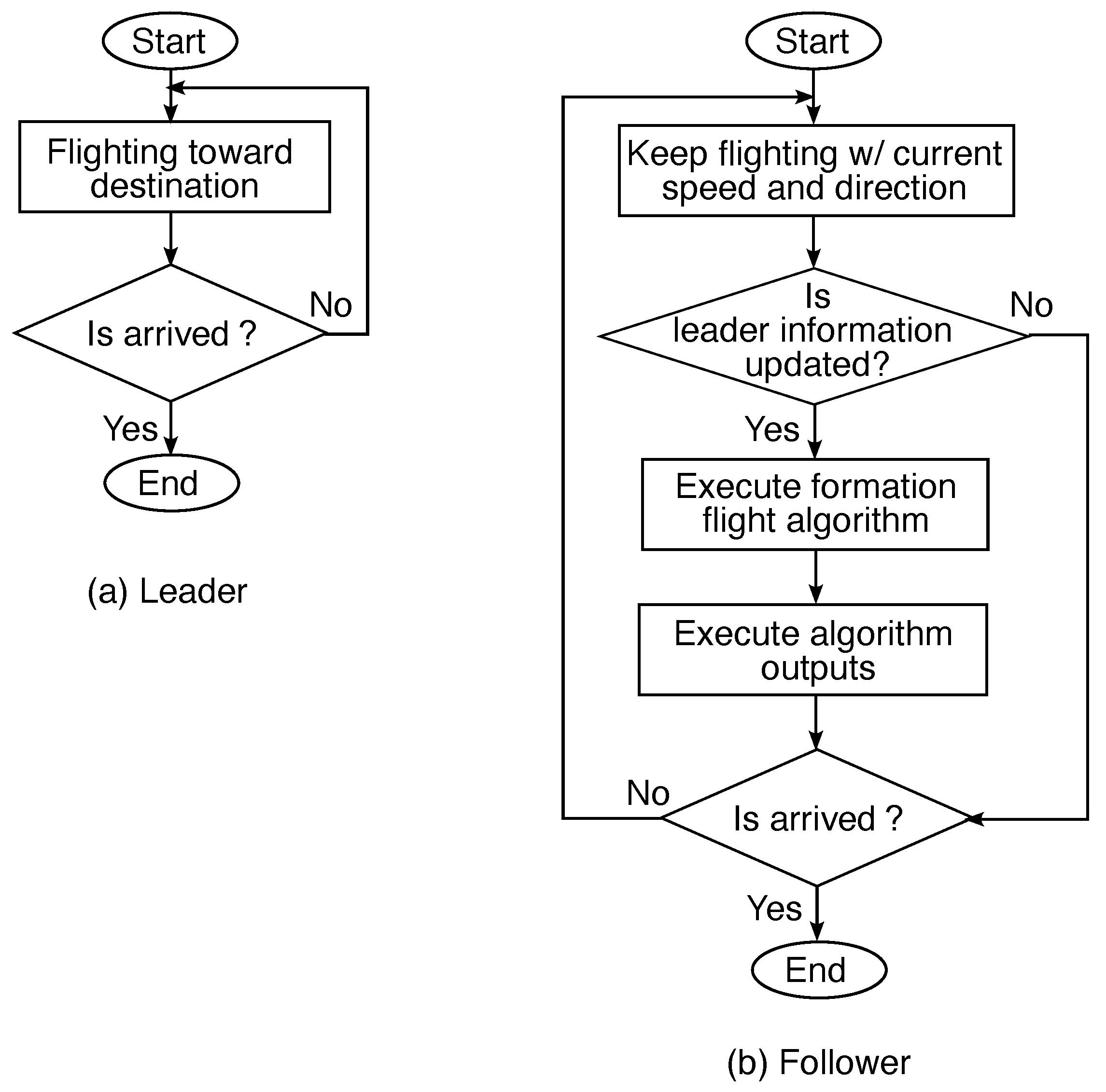
3.2. Formation Flight Method
| Algorithm 2: Formation flight algorithm. |
| 1 Input: , , T; |
| 2 Output: , ; |
| 3 % and are adjusted flight direction and speed of after algorithm performance; |
| 4 Run (7) to calculate , , and ; |
| 5 Run (8) to calculate ; |
| 6 Run (9) and (10) to calculate ; |
| 7 Return; |
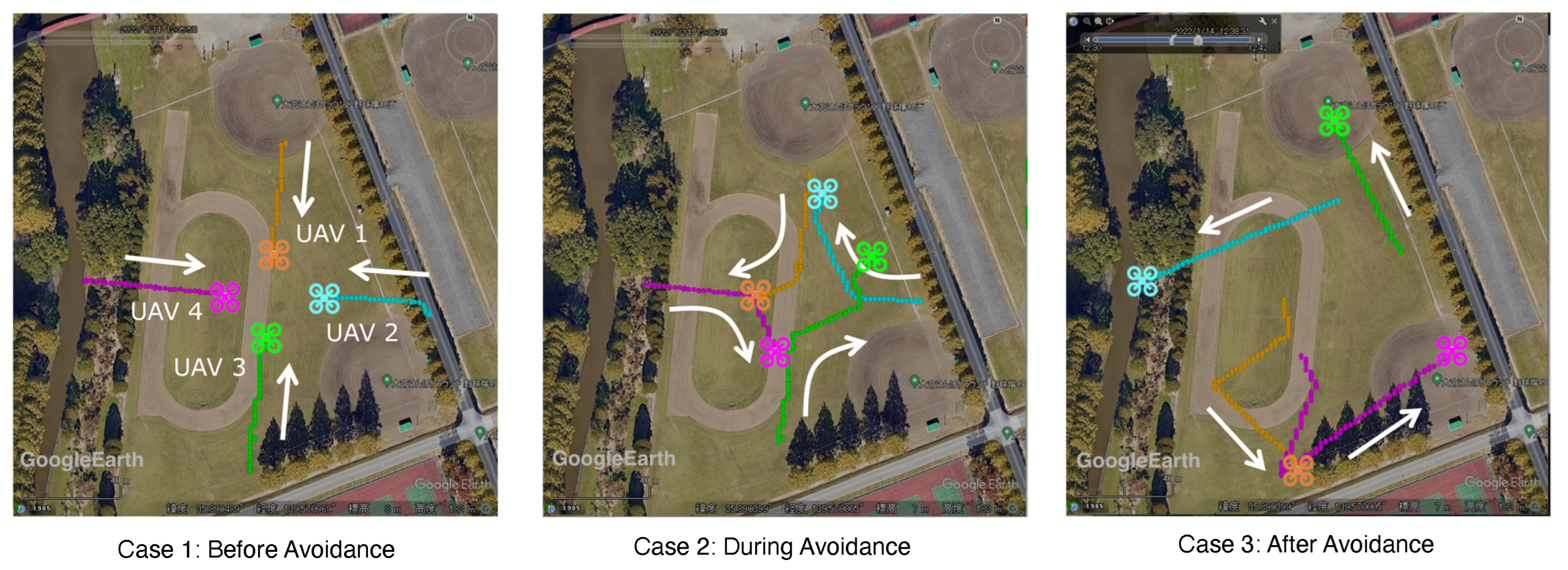
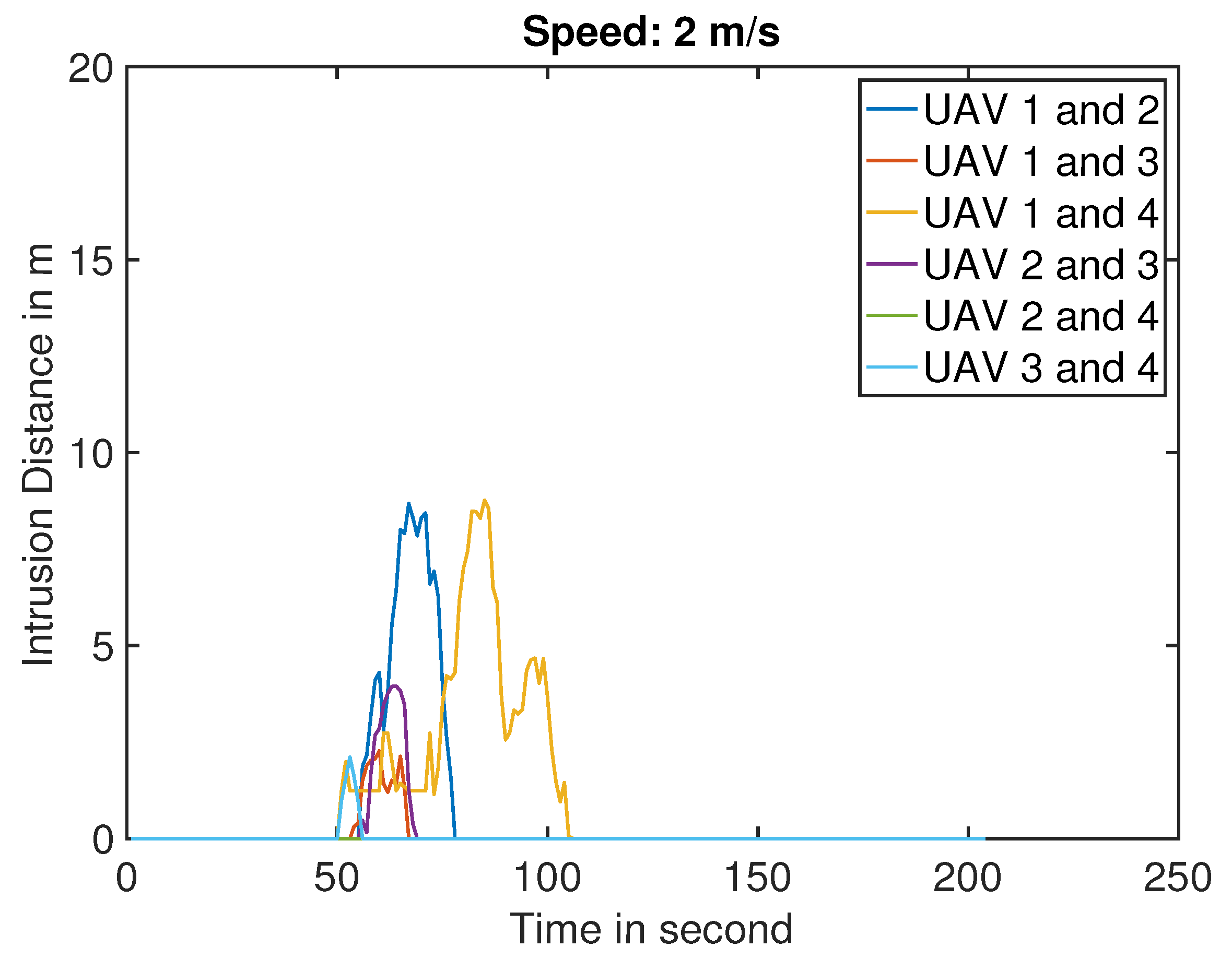
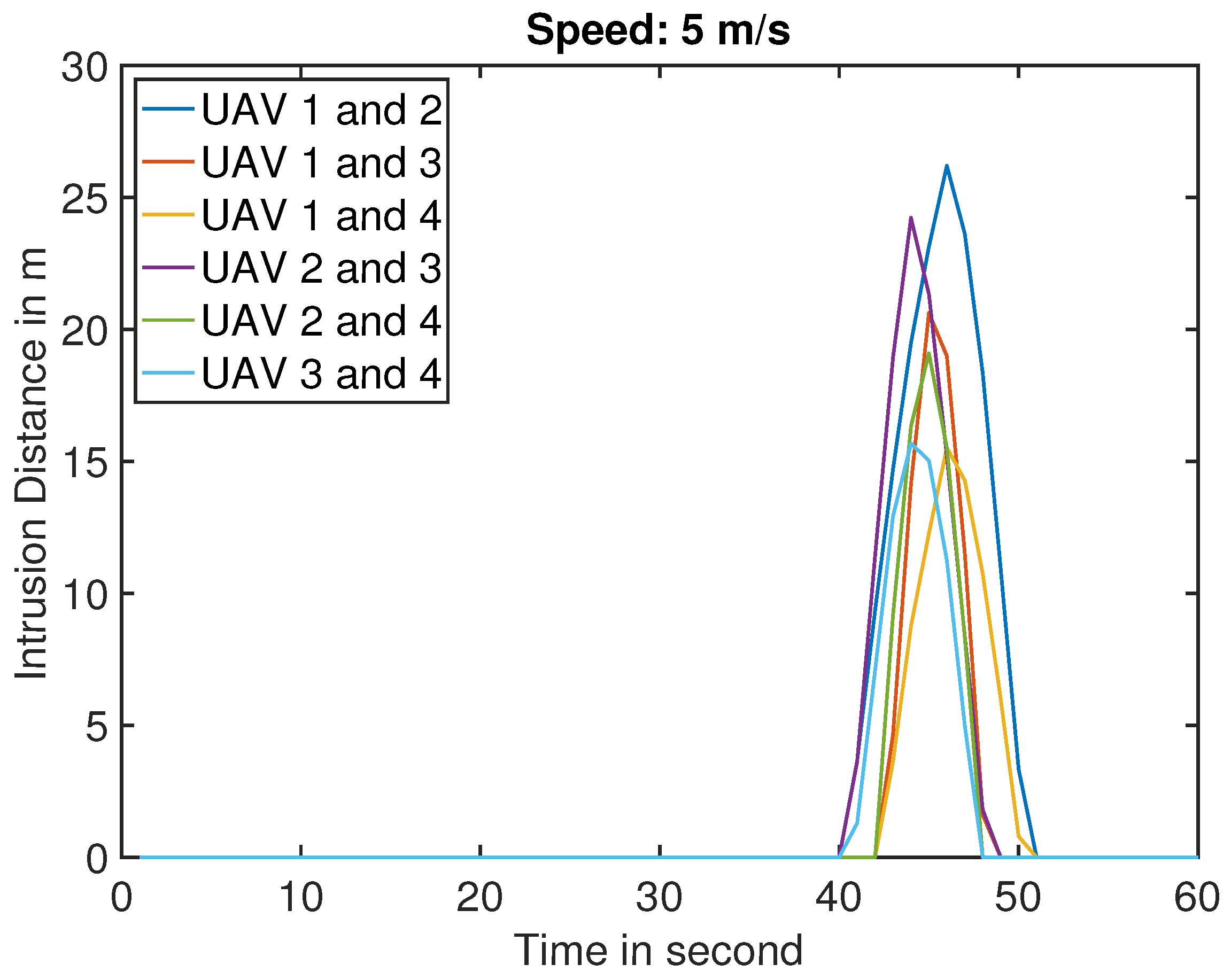
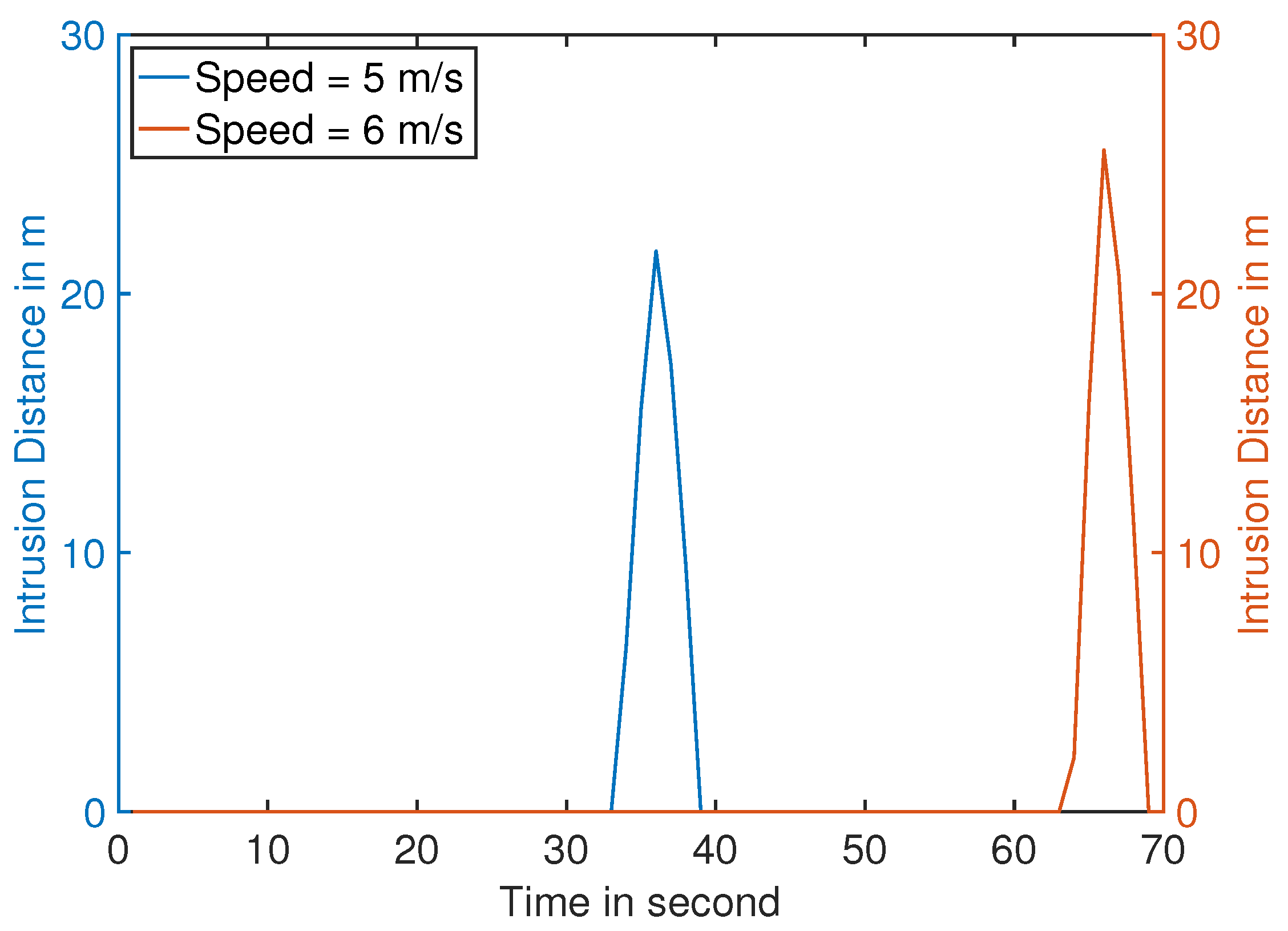
4. Field Experiment Evaluations
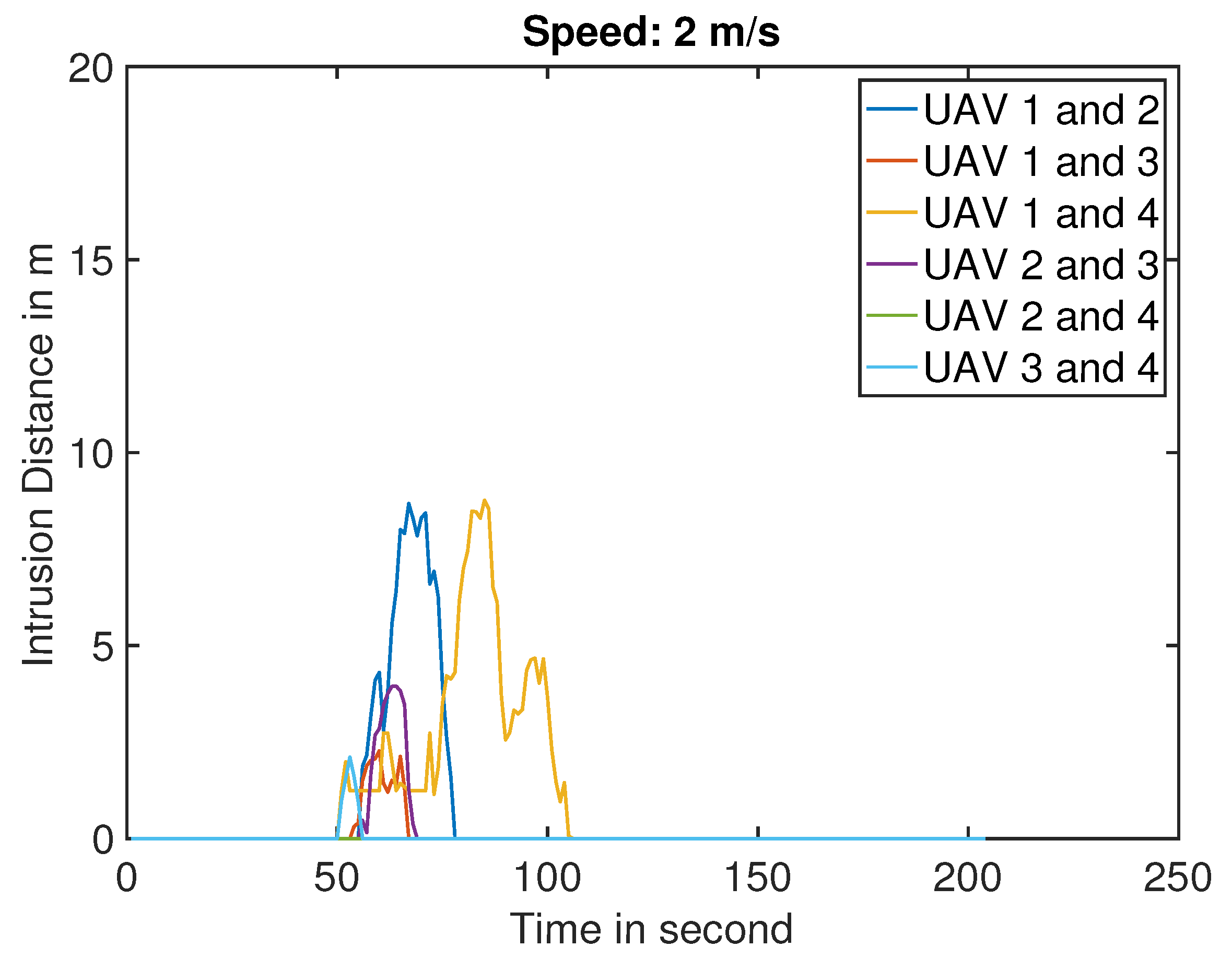
4.1. Collision-Avoidance Experiment Evaluations
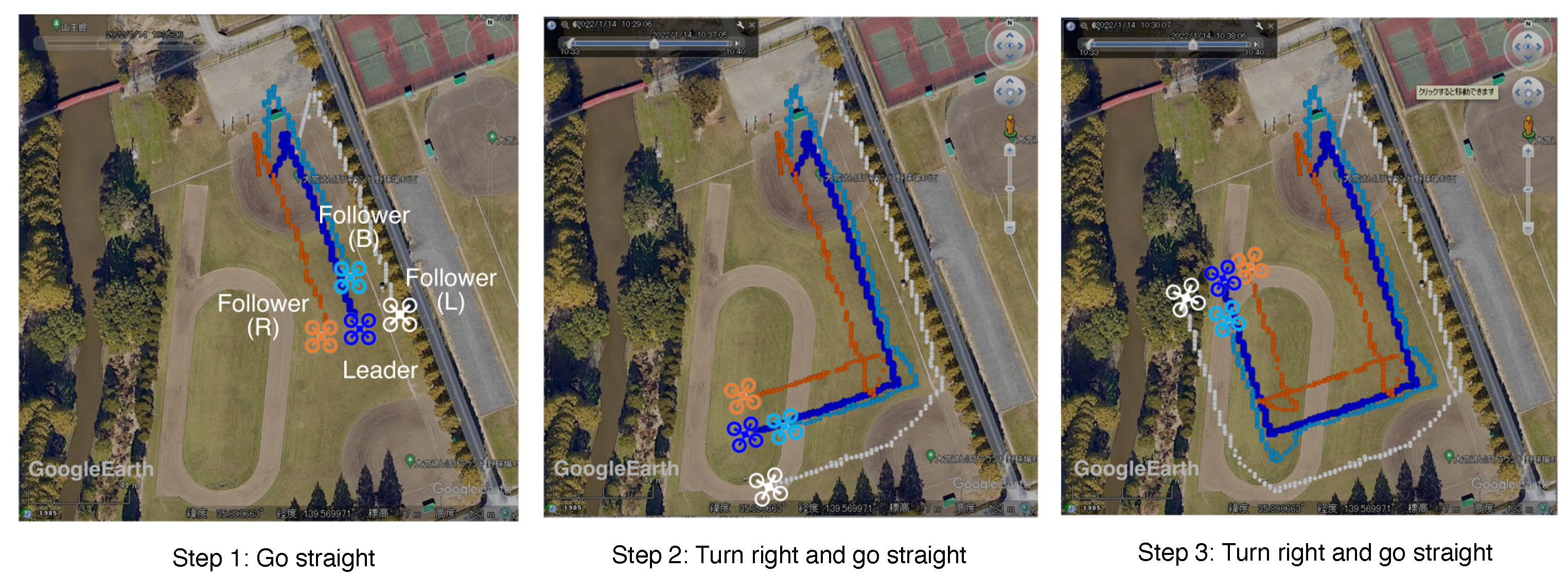
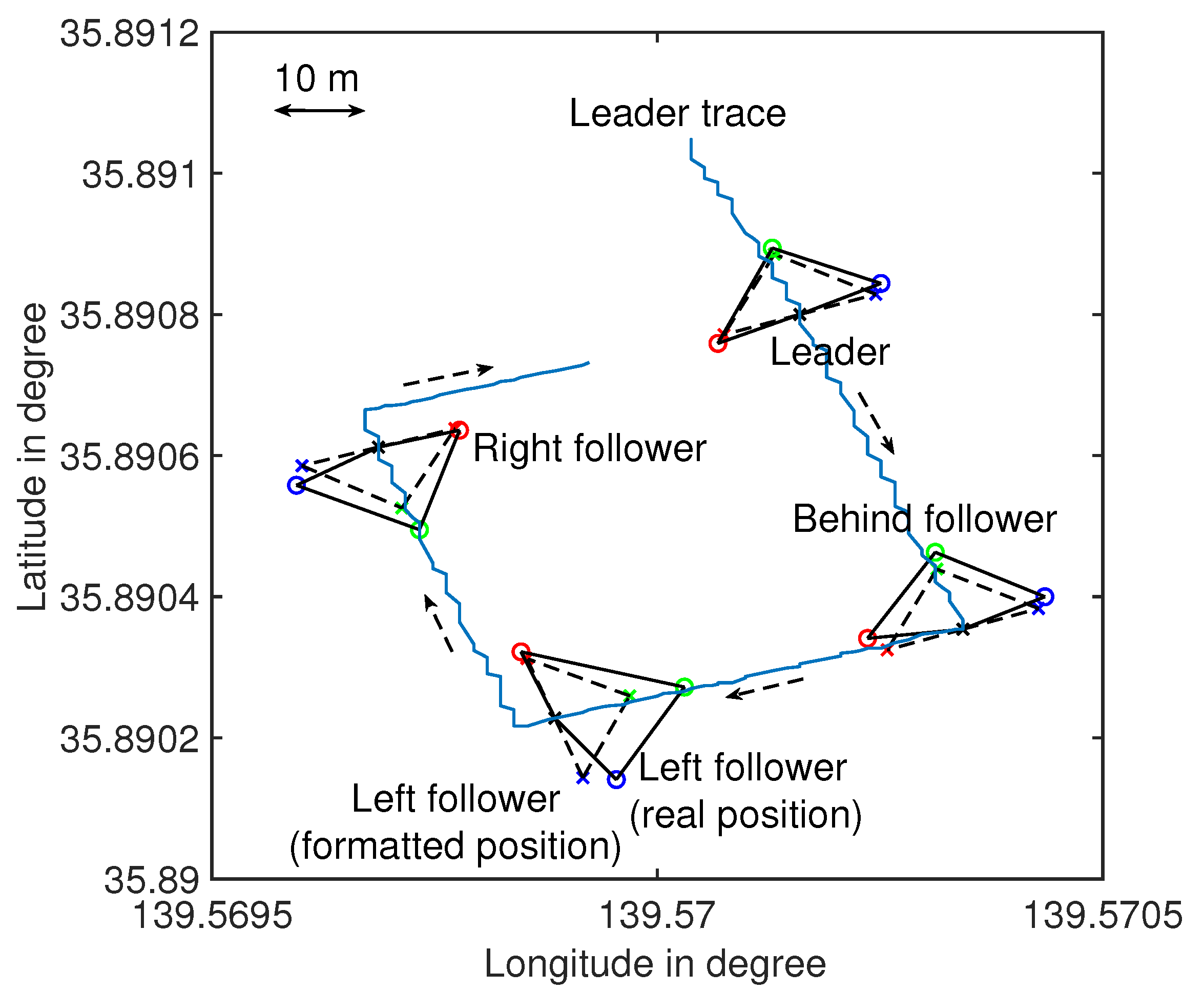
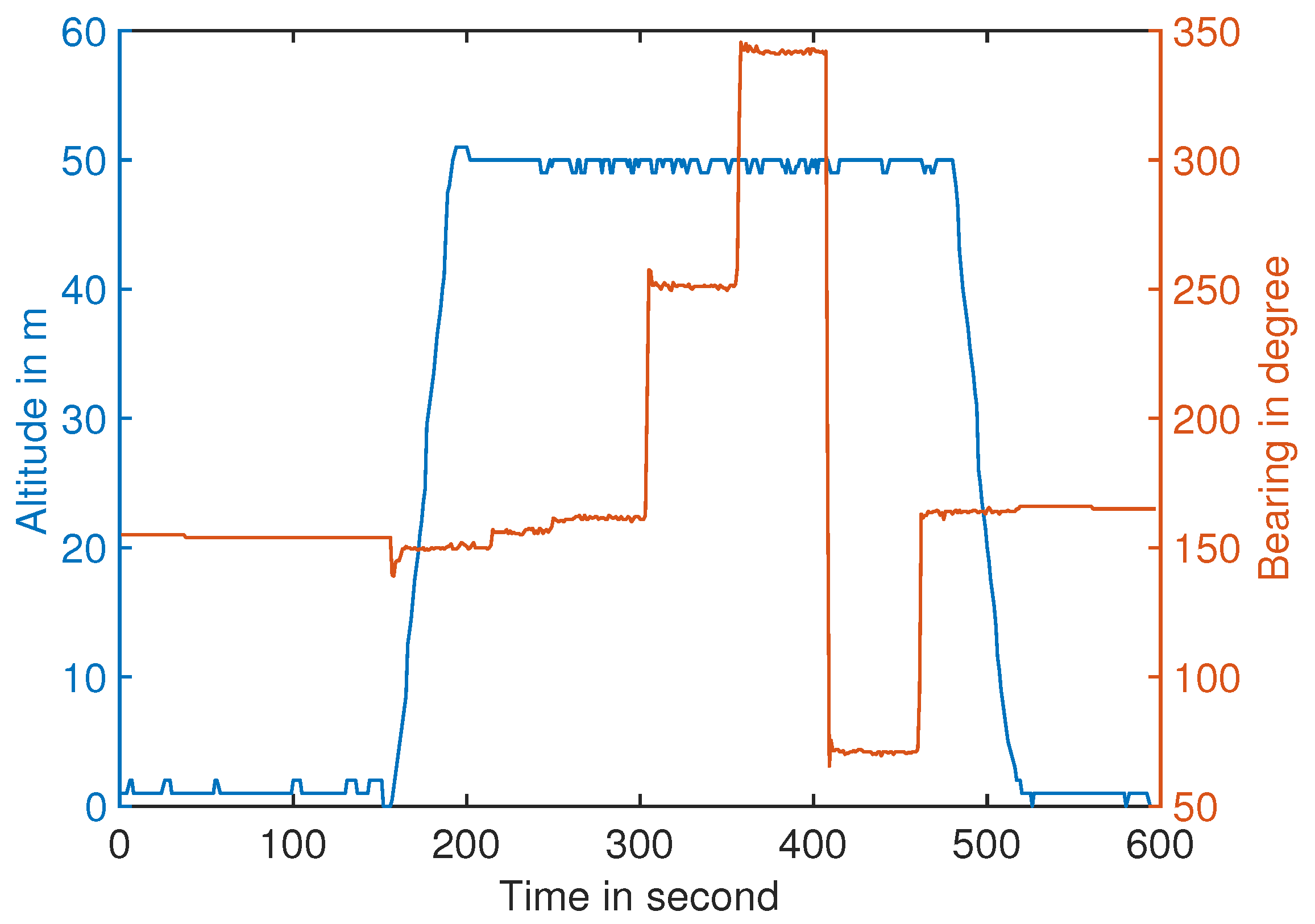
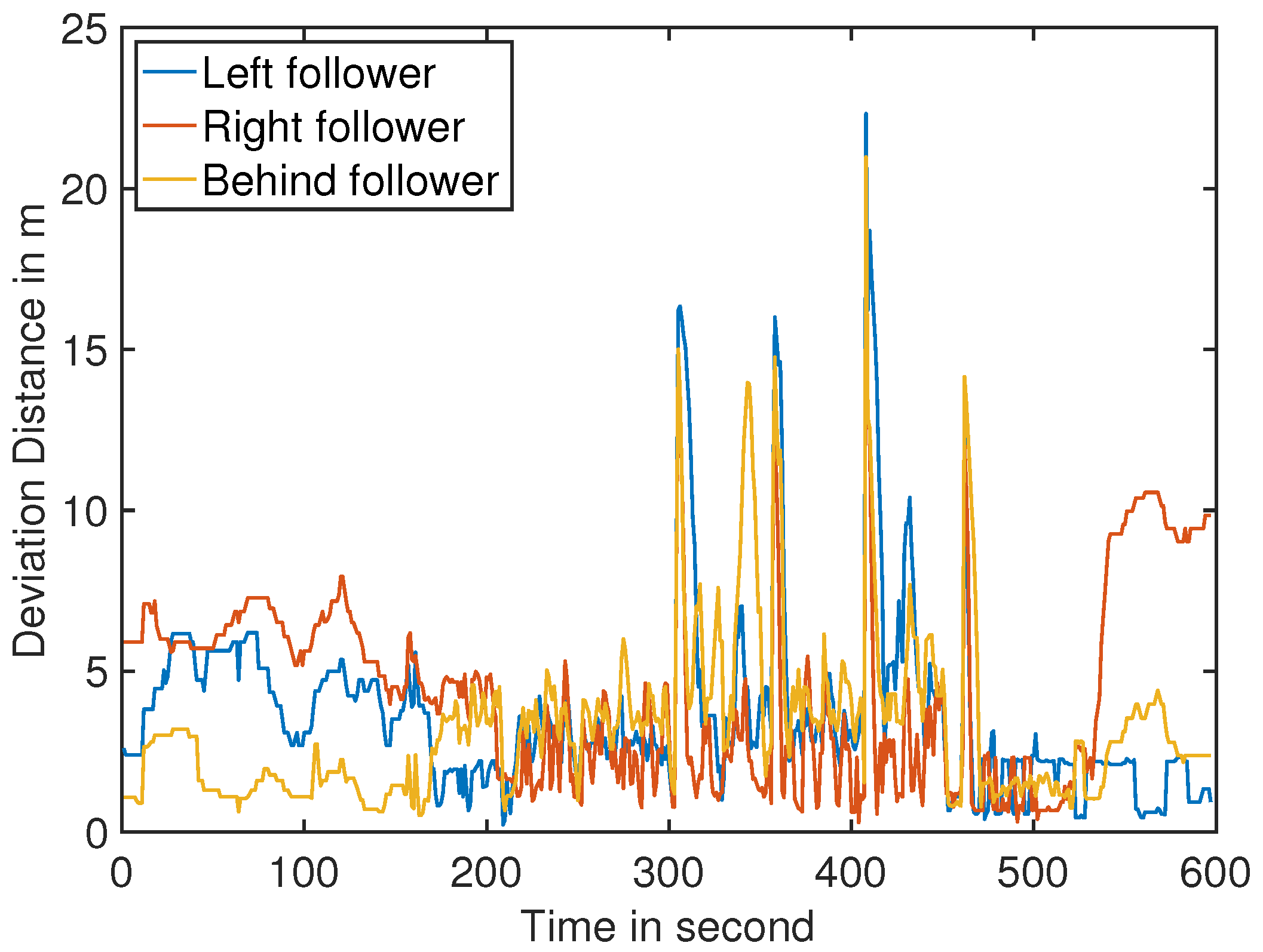
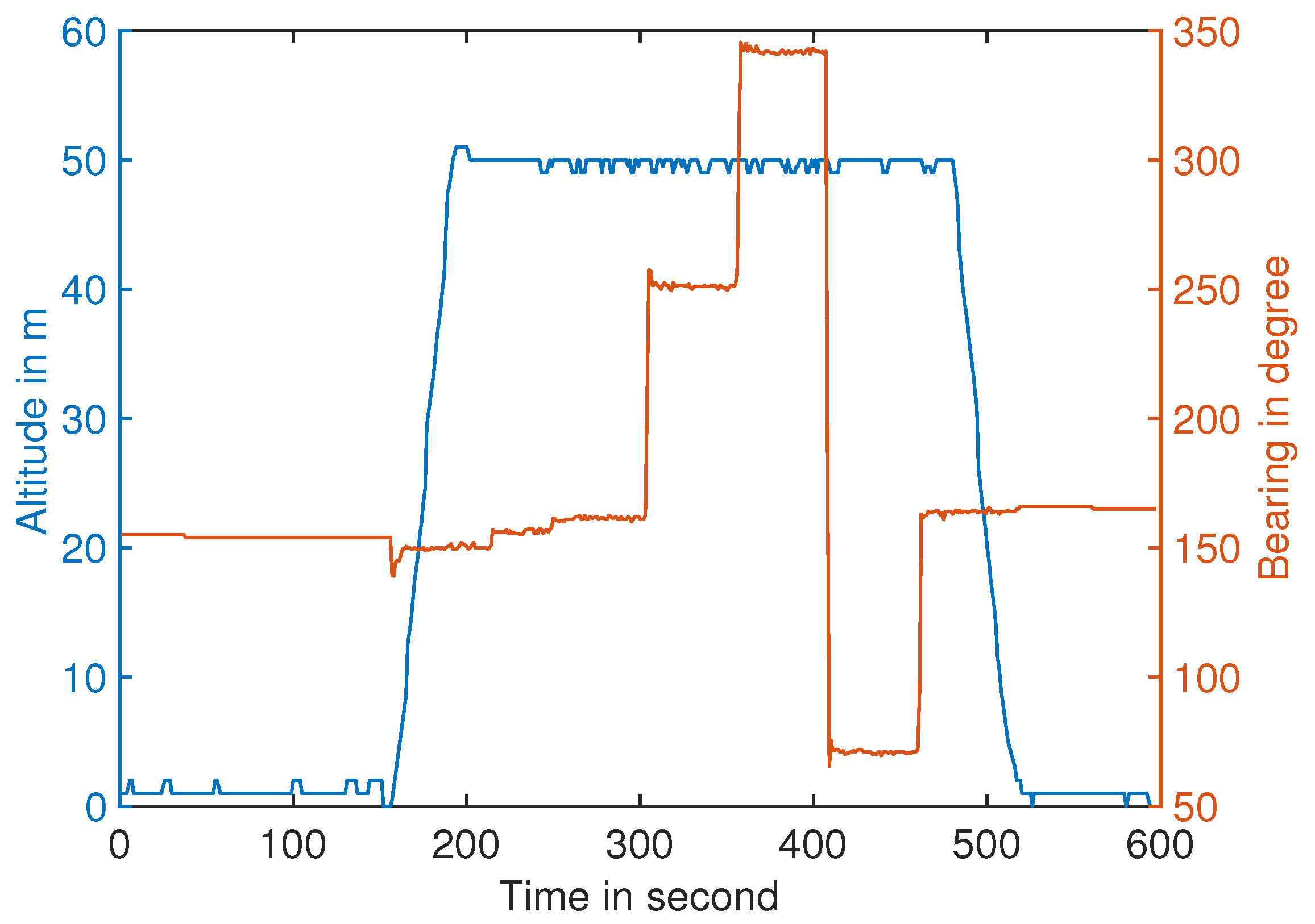
4.2. Formation Flight Experiment Evaluations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rinaldi, F.; Maattanen, H.L.; Torsner, J.; Pizzi, S.; Andreev, S.; Iera, A.; Koucheryavy, Y.; Araniti, G. Non-terrestrial networks in 5G & Beyond: A survey. IEEE Access 2020, 8, 165178–165200. [Google Scholar]
- Baltaci, A.; Dinc, E.; Ozger, M.; Alabbasi, A.; Cavdar, C.; Schupke, D. A survey of wireless networks for future aerial communications (FACOM). IEEE Commun. Surv. Tut. 2021, 23, 2833–2884. [Google Scholar] [CrossRef]
- Zhao, N.; Lu, W.; Sheng, M.; Chen, Y.; Tang, J.; Yu, F.R.; Wong, K.-K. UAV-assisted emergency networks in disasters. IEEE Wirel. Commun. 2019, 26, 45–51. [Google Scholar] [CrossRef]
- Saraereh, O.A.; Alsaraira, A.; Khan, I.; Uthansakul, P. Performance evaluation of UAV-enabled LoRa networks for disaster management applications. Sensors 2020, 20, 2396. [Google Scholar] [CrossRef] [PubMed]
- Barnhart, R.K.; Marshall, D.M.; Shappee, E.; Barnhart, R.K.; Marshall, D.M.; Shappee, E. Introduction to Unmanned Aircraft Systems, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2021; ISBN 9781000326864. [Google Scholar]
- Ancel, E.; Capristan, F.M.; Foster, J.V.; Condotta, R.C. Real-time risk assessment framework for unmanned aircraft system (UAS) traffic management (UTM). In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Ferreira, R.B.; Baum, D.M.; Neto, E.C.P.; Martins, M.R.; Almeida, J.R.; Cugnasca, P.S.; Camargo, J.B. A risk analysis of unmanned aircraft systems (UAS) integration into non-segregate airspace. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 42–51. [Google Scholar]
- Mohammed, F.; Idries, A.; Mohamed, N.; Al-Jaroodi, J.; Jawhar, I. UAVs for smart cities: Opportunities and challenges. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 267–273. [Google Scholar]
- Prevot, T.; Rios, J.; Kopardekar, P.; Robinson, J.E.R., III; Johnson, M.; Jung, J. UAS traffic management (UTM) concept of operations to safely enable low altitude flight operations. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; pp. 13–17. [Google Scholar]
- Lin, C.E.; Hsieh, C.-S.; Li, C.-C.; Shao, P.-C.; Lin, Y.-H.; Yeh, Y.-C. An ADS-B like communication for UTM. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–12. [Google Scholar]
- Schalk, L.M.; Herrmann, M. Suitability of LTE for drone-to-infrastructure communications in very low level airspace. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), Petersburg, FL, USA, 17–21 September 2017; pp. 1–7. [Google Scholar]
- Polvara, R.; Sharma, S.; Wan, J.; Manning, A.; Sutton, R. Obstacle avoidance approaches for autonomous navigation of unmanned surface vehicles. J. Navigat. 2018, 71, 241–256. [Google Scholar] [CrossRef]
- Shrestha, R.; Bajracharya, R.; Kim, S. 6G enabled unmanned aerial vehicle traffic management: A perspective. IEEE Access 2021, 9, 91119–91136. [Google Scholar] [CrossRef]
- Geraci, G.; Garcia-Rodriguez, A.; Azari, M.M.; Lozano, A.; Mezzavilla, M.; Chatzinotas, S.; Chen, Y.; Rangan, S.; Renzo, M.D. What will the future of UAV cellular communications be? A flight from 5G to 6G. IEEE Commun. Surv. Tutorials 2022, 24, 1304–1335. [Google Scholar] [CrossRef]
- Vinogradov, E.; Pollin, S. Reducing safe UAV separation distances with U2U communication and new Remote ID formats. In Proceedings of the 2022 IEEE Globecom Workshops (GC Wkshps), Rio de Janeiro, Brazil, 4–8 December 2022; pp. 1425–1430. [Google Scholar]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Chenaru, O.; Ichim, L. A Survey of collaborative UAV–WSN systems for efficient monitoring. Sensors 2019, 19, 4690. [Google Scholar] [CrossRef] [PubMed]
- Karamchedu, V.P. A path from Device-to-Device to UAV-to-UAV communications. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 4–7 October 2020; pp. 1–5. [Google Scholar]
- Ajakwe, S.O.; Ihekoronye, V.U.; Kim, D.S.; Lee, J.M. SimNet: UAV-Integrated Sensor Nodes Localization for Communication Intelligence in 6G Networks. In Proceedings of the 2022 27th Asia Pacific Conference on Communications (APCC), Jeju Island, South Korea, 19–21 October 2022; pp. 1–5. [Google Scholar]
- Li, B.; Fei, Z.; Zhang, Y.; Guizani, M. Secure UAV Communication Networks over 5G. IEEE Wirel. Commun. 2019, 26, 114–120. [Google Scholar] [CrossRef]
- Kawamoto, Y.; Mitsuhashi, T.; Kato, N. UAV-aided information diffusion for vehicle-to-vehicle (V2V) in disaster scenarios. IEEE Trans. Emerg. Top. Comput. 2021, 10, 1909–1917. [Google Scholar] [CrossRef]
- Shan, L.; Miura, R.; Kagawa, T.; Ono, F.; Li, H.-B.; Kojima, F. Machine learning-based field data analysis and modeling for drone communications. IEEE Access 2019, 7, 79127–79135. [Google Scholar] [CrossRef]
- Shan, L.; Miura, R.; Kagawa, H.; Ono, F.; Li, H.B.; Kojima, F.; Kato, S. Field tests on drone mapper location information and remote ID sharing network in the 920MHz band for drones. In Proceedings of the 21th International Symposium on Wireless Personal Multimedia Communications (WPMC2018), Chiang Rai, Thailand, 25–28 November 2018; pp. 1–5. [Google Scholar]
- Raza, U.; Kulkarni, P.; Sooriyabandara, M. Low power wide area networks: An overview. IEEE Commun. Surv. Tutorials 2017, 19, 855–873. [Google Scholar] [CrossRef]
- Kantelis, K.F.; Beletsioti, G.A.; Valkanis, A.; Nicopolitidis, P.; Papadimitriou, G.I. A TDMA-based access protocol for dense networks with moving nodes for IoT applications. Electronics 2023, 12, 1628. [Google Scholar] [CrossRef]
- Zhao, O.; Liao, W.-S.; Ishizu, K.; Kojima, F. Dynamic and non-centric networking approach using virtual gateway platforms for low power wide area systems. IEEE Access 2019, 7, 186078–186090. [Google Scholar] [CrossRef]
- Association of Radio Industries and Businesses (ARIB). 920MHz-Band Telemeter, Telecontrol, and Data Transmission Radio Equipment; Association of Radio Industries and Businesses (ARIB): Tokyo, Japan, 2023; Volume ARIB STD-T108. [Google Scholar]
- Shan, L.; Li, H.-B.; Miura, R.; Matsuda, T.; Matsumura, T. A novel collision avoidance strategy with D2D communications for UAV systems. Drones 2023, 7, 283. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Size | |
| Weight | 100 g |
| Technical standard | ARIB STD T108 |
| CPU | RaspberryPi4 |
| Memory | 2 GB |
| Modulation method | LoRa/FSK |
| Operation frequency | 920.1 MHz∼928.0 MHz |
| Duplex | TDMA |
| Transmission mode | Broadcast |
| Synchronous method | GNSS-based |
| Transmission power | 20 mW max |
| Transmission rate | 293 bps∼37.5 kbps (LoRa) |
| 50 kbps∼300 kbps (FSK) | |
| Transmission distance | 1 km∼10 km (LoRa) |
| 600 m∼2 km (FSK) | |
| Transmissions per second | 4 times (FSK) |
| 2 times (LoRa) |
| Item | Range | Size (bit) |
|---|---|---|
| UAV ID | 0∼FFFFFFFF (HEX) | 32 |
| Time (UTC) | 0∼86,400 (s) | 17 |
| Latitude | ±ddmm.mmmm | 28 |
| Longitude | ±dddmm.mmmm | 28 |
| Altitude | −32,767∼32,767 (m) | 16 |
| Speed | 0∼1023 (km/h) | 10 |
| Direction | 0∼720 (Decimal/2) degree | 10 |
| Parameter | Value |
|---|---|
| Model | UAV-E6106FA2 |
| Serial Number | F2000016 |
| Registration Code | JU32263EB76X |
| Weight | 8.32 kg |
| Dimensions | 1060 mm (diagonally between motors) |
| Flight Time | approximately 30 min |
| Maximum Payload | approximately 6.2 kg |
| Maximum Flight Speed | 72 km/h |
| Wind Resistance | 10 m/s |
| Parameter | Value |
|---|---|
| Experiment Environment | Open airspace in suburb |
| Communication Protocol | LoRa or FSK |
| Number of UAVs, N | 2 or 4 |
| Alert radius, | 10 m or 15 m |
| Speed, | 2 m/s or 5 m/s or 6 m/s |
| Information-sharing duration, T | 0.5 s or 0.25 s |
| Distance between leader and follower, D | 10 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, L.; Miura, R.; Matsuda, T.; Koshikawa, M.; Li, H.-B.; Matsumura, T. Vehicle-to-Vehicle Based Autonomous Flight Coordination Control System for Safer Operation of Unmanned Aerial Vehicles. Drones 2023, 7, 669. https://doi.org/10.3390/drones7110669
Shan L, Miura R, Matsuda T, Koshikawa M, Li H-B, Matsumura T. Vehicle-to-Vehicle Based Autonomous Flight Coordination Control System for Safer Operation of Unmanned Aerial Vehicles. Drones. 2023; 7(11):669. https://doi.org/10.3390/drones7110669
Chicago/Turabian StyleShan, Lin, Ryu Miura, Takashi Matsuda, Miho Koshikawa, Huan-Bang Li, and Takeshi Matsumura. 2023. "Vehicle-to-Vehicle Based Autonomous Flight Coordination Control System for Safer Operation of Unmanned Aerial Vehicles" Drones 7, no. 11: 669. https://doi.org/10.3390/drones7110669
APA StyleShan, L., Miura, R., Matsuda, T., Koshikawa, M., Li, H.-B., & Matsumura, T. (2023). Vehicle-to-Vehicle Based Autonomous Flight Coordination Control System for Safer Operation of Unmanned Aerial Vehicles. Drones, 7(11), 669. https://doi.org/10.3390/drones7110669