
Performance Analysis of Visual–Inertial–Range Cooperative Localization for Unmanned Autonomous Vehicle Swarm


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We compute the closed-form FIM for visual–inertial–range CL in manifold and validate its correctness and reachability.
- We reveal the sparsity structure of the FIM and its relations with the measurement connections.
- We introduce the equivalent Fisher information matrix (EFIM) to overcome the computational intractable when the number of visual features grows.
2. System Model and Problem Formulation
3. Calculation of Fisher Information Matrix
3.1. The FIM Expression for 2-D Case
3.1.1. FIM for Intra-UAV State Transition Measurement
3.1.2. FIM for Visual Measurement
3.1.3. FIM for Range Measurement
3.2. The FIM Expression for the 3-D Case
4. Properties of the Fisher Information Matrix
4.1. The Geometric Property of the FIM
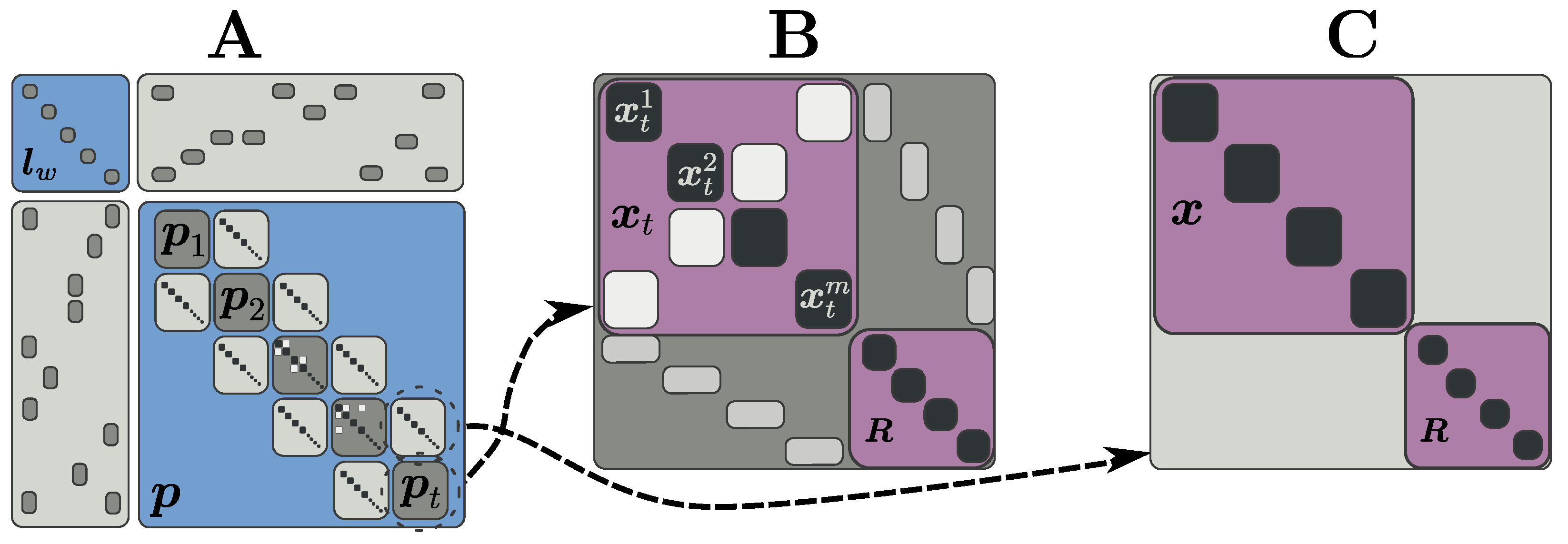
4.2. The Structure of the FIM
- Due to the independent nature of the visual feature, IMU, and ranging measurements, the whole FIM is the sum of the FIMs for these three parts, which has been identified by Equation (11).
- The rank of the FIM is less than its dimension, so it is rank-deficient, which means it is non-invertible because all mentioned measurements are unable to provide any global pose information for any UAV. Thus, we cannot calculate the corresponding Cramér–Rao lower bound (CRLB) directly, which is normally the inverse of the FIM. To avoid the rank-deficient problem, we can either obtain additional global information, or delete some rows and columns of the FIM, which is equivalent to assuming that the corresponding states are perfectly known.
- Range measurement only affects the correlation of the position states of corresponding UAVs at the ranging time epoch, so they cannot provide any information about rotation.
- Since the visual feature states are considered, the direct correlation of UAV states in FIM only exists between the consecutive states of the same UAV, which is caused by the IMU measurement, which forms the structure of C, as seen in Figure 3.
- The non-zero correlation element between visual feature and UAV state indicates the visual feature visibility for certain UAVs. In the following, we will see that, when the visual feature states are eliminated, the remaining part of the FIM has a structure similar to the FIM of a pose graph, of which each link corresponds to the co-visibility of a same visual feature. This property enables us to efficiently calculate some metrics for measurement optimization.
- is a sparse-positive semidefinite matrix, and the non-zero block indicates that m-th and n-th UAV have common visibility for some visual features.
- is harmonic, i.e.,
4.3. CRLB for Visual–Inertial–Range Cooperative Localization
5. Numerical Results
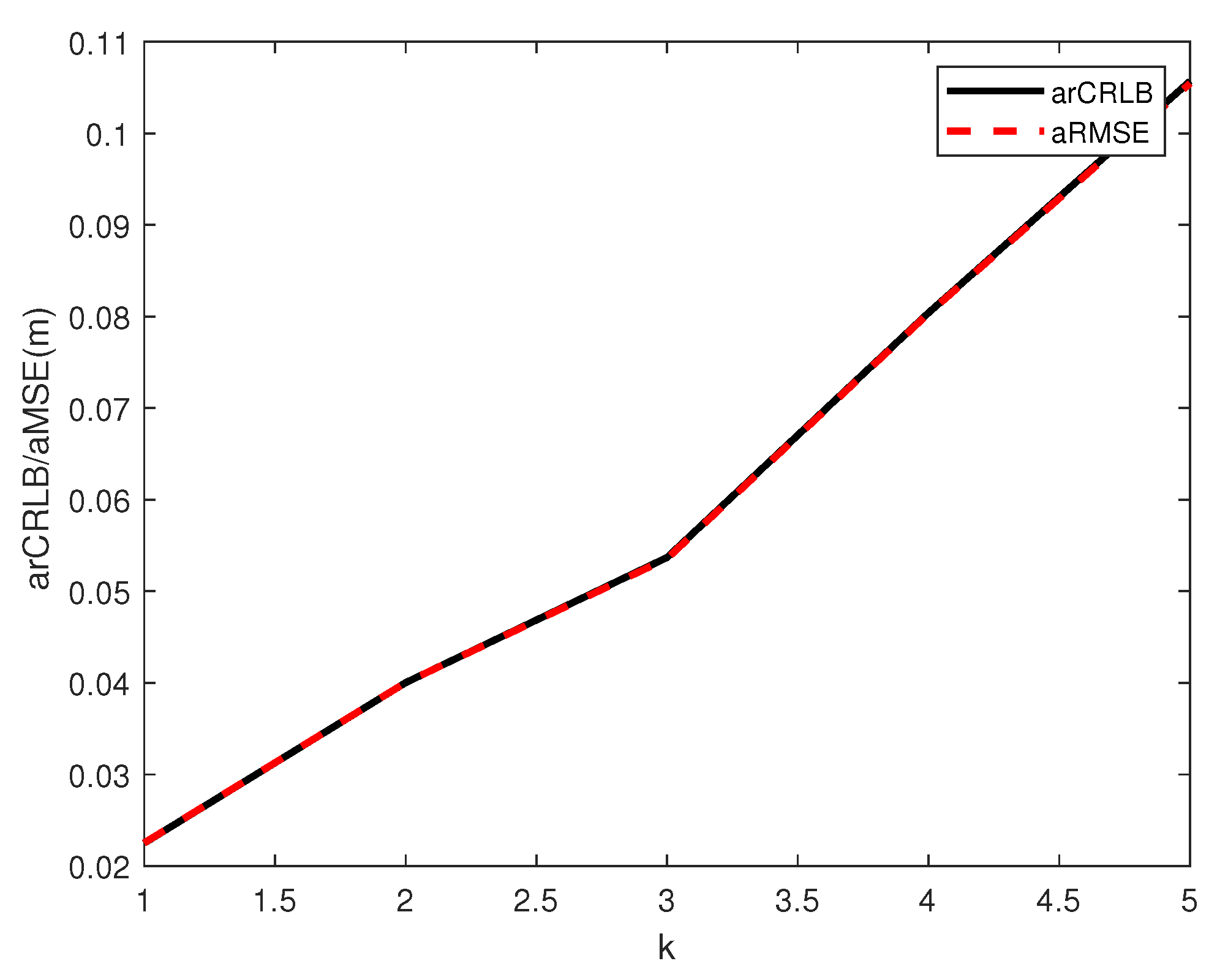
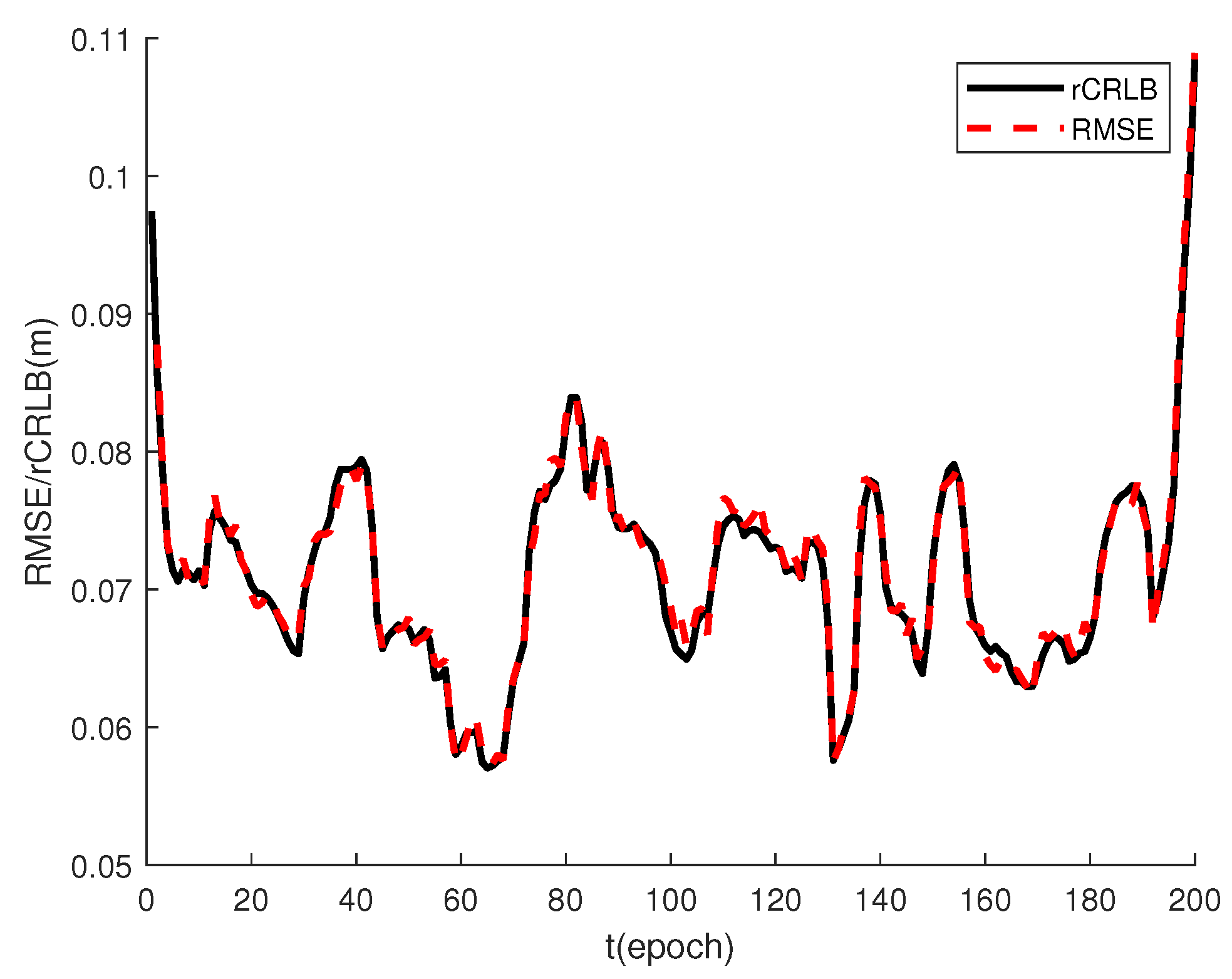
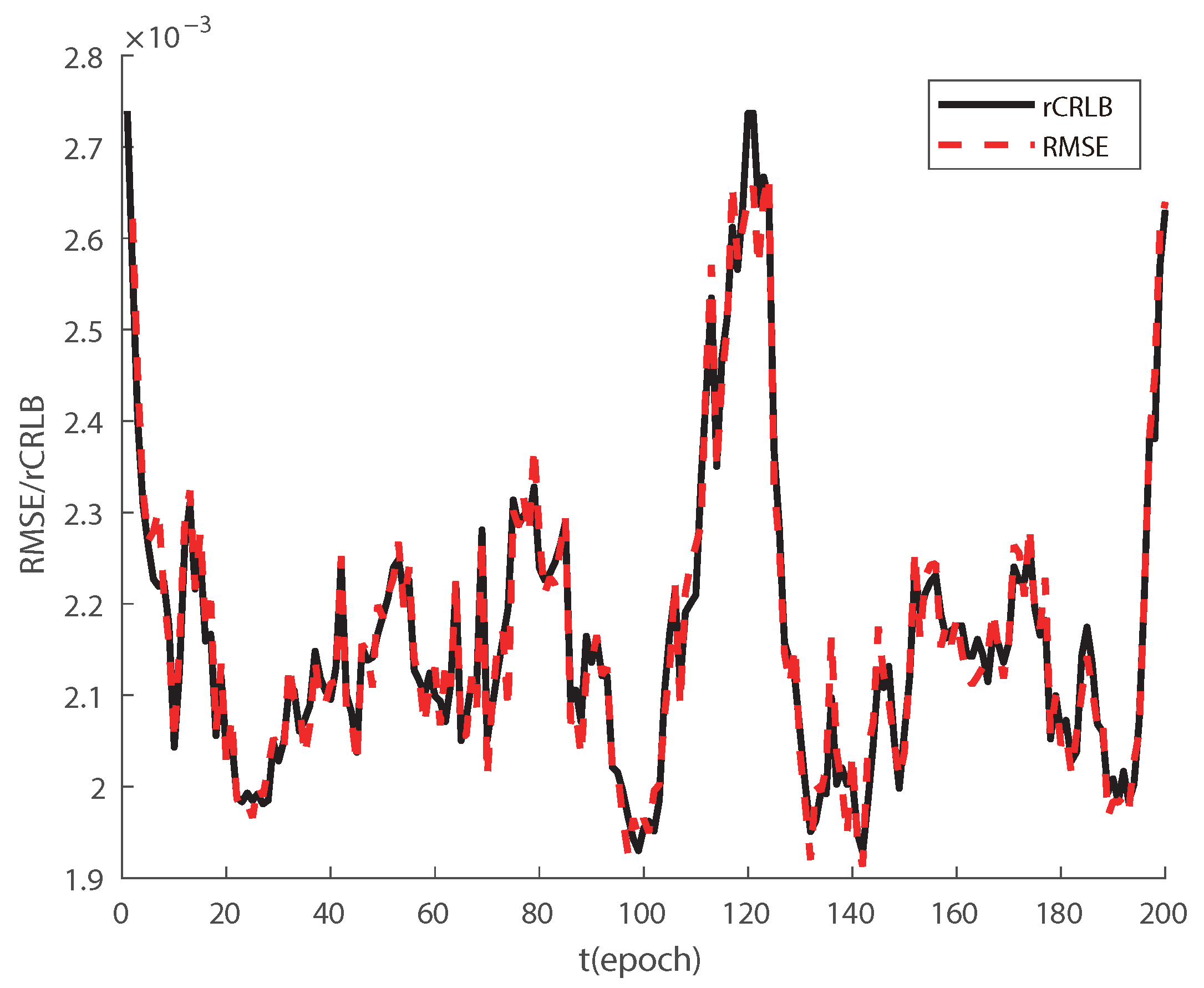
5.1. Correctness and Reachability of the CRLB
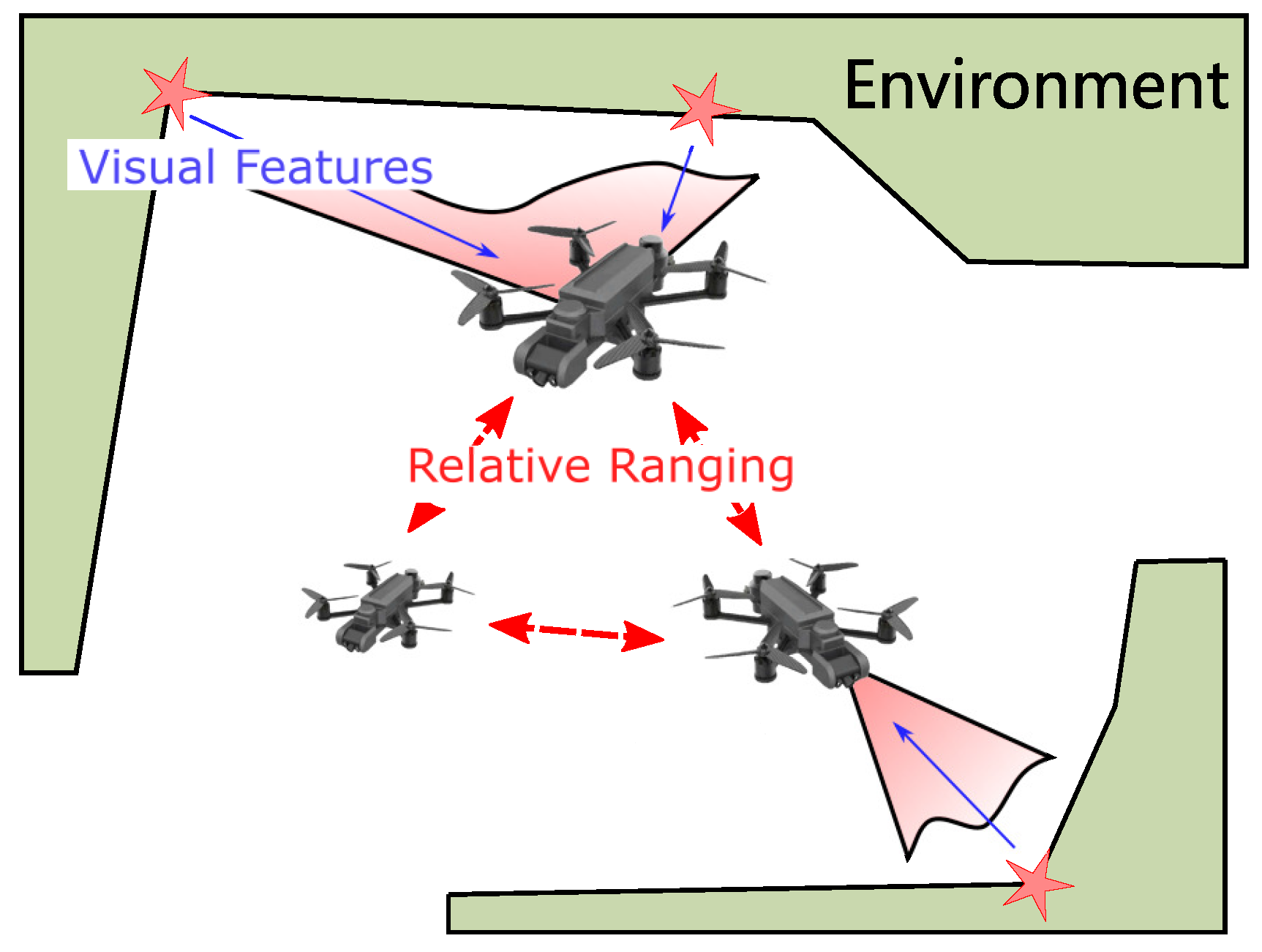
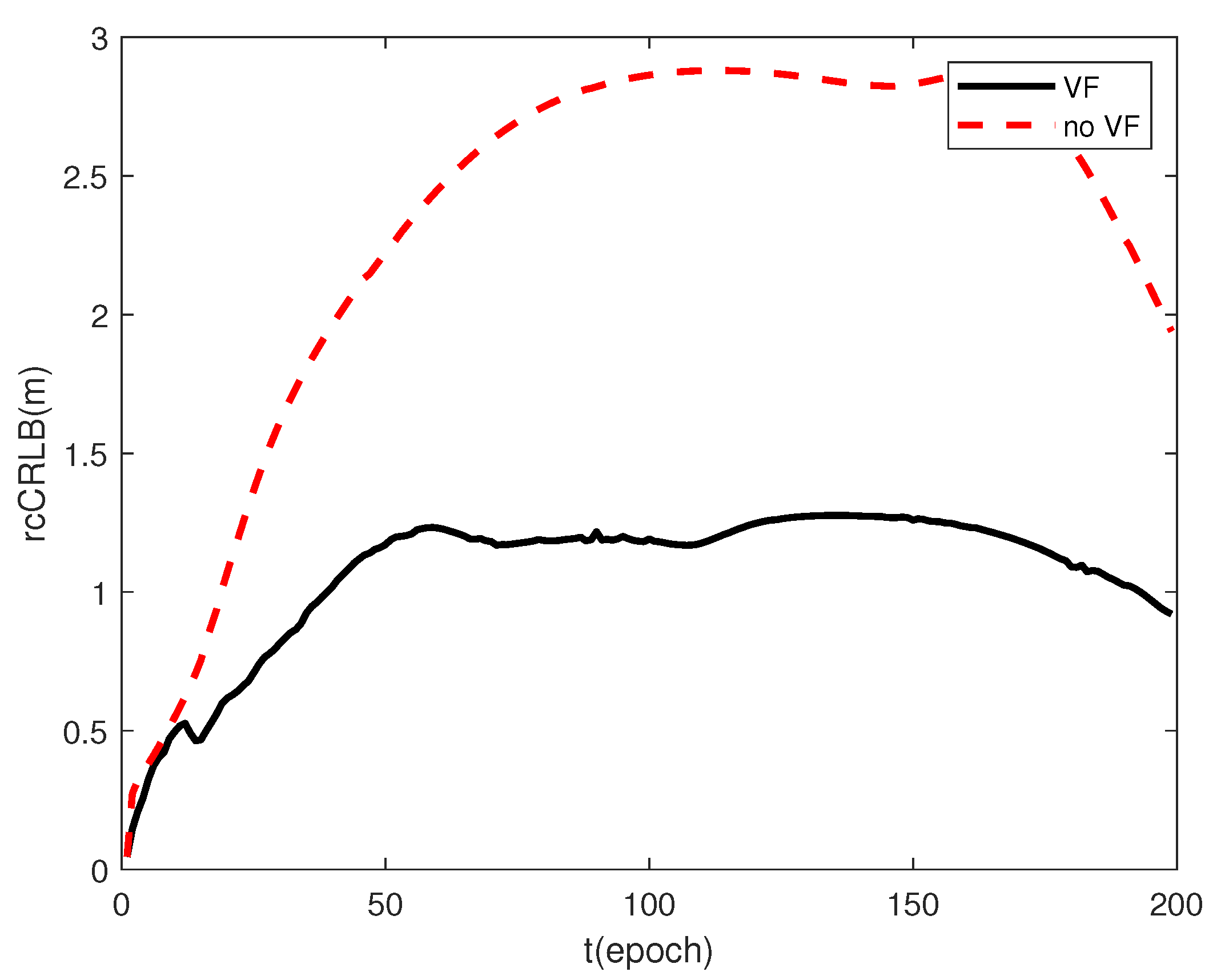
5.2. The Effect of the Visual Feature for CL
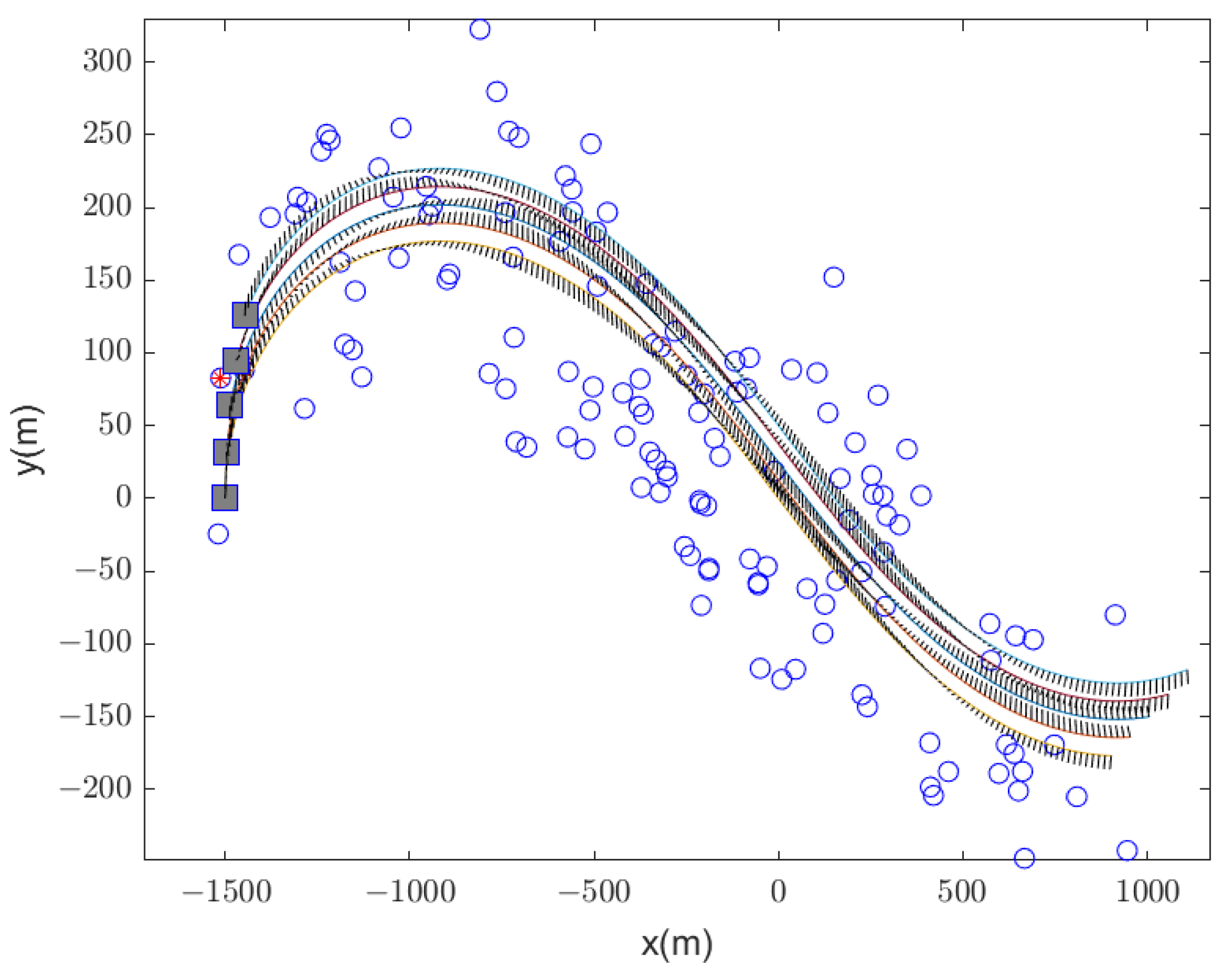
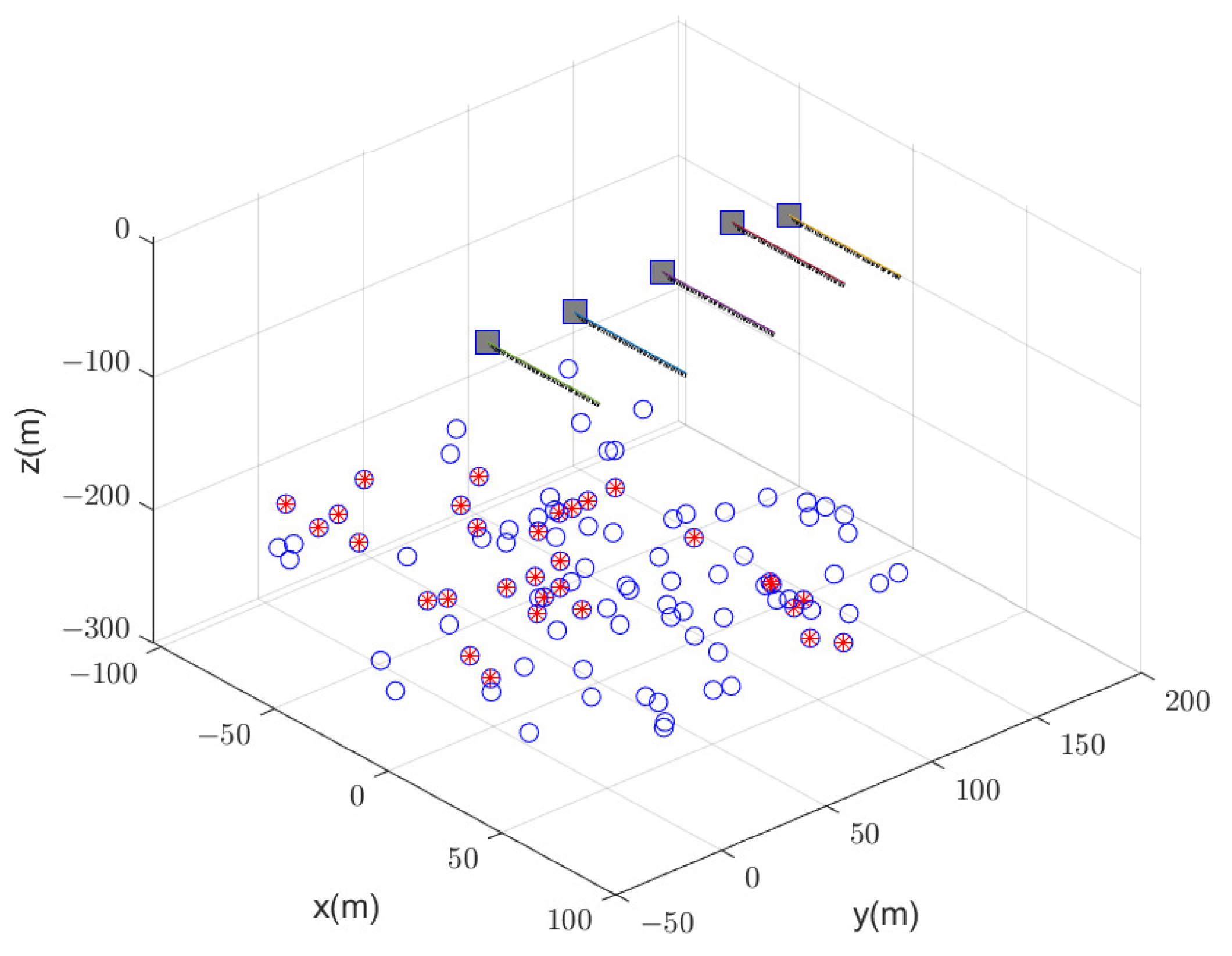
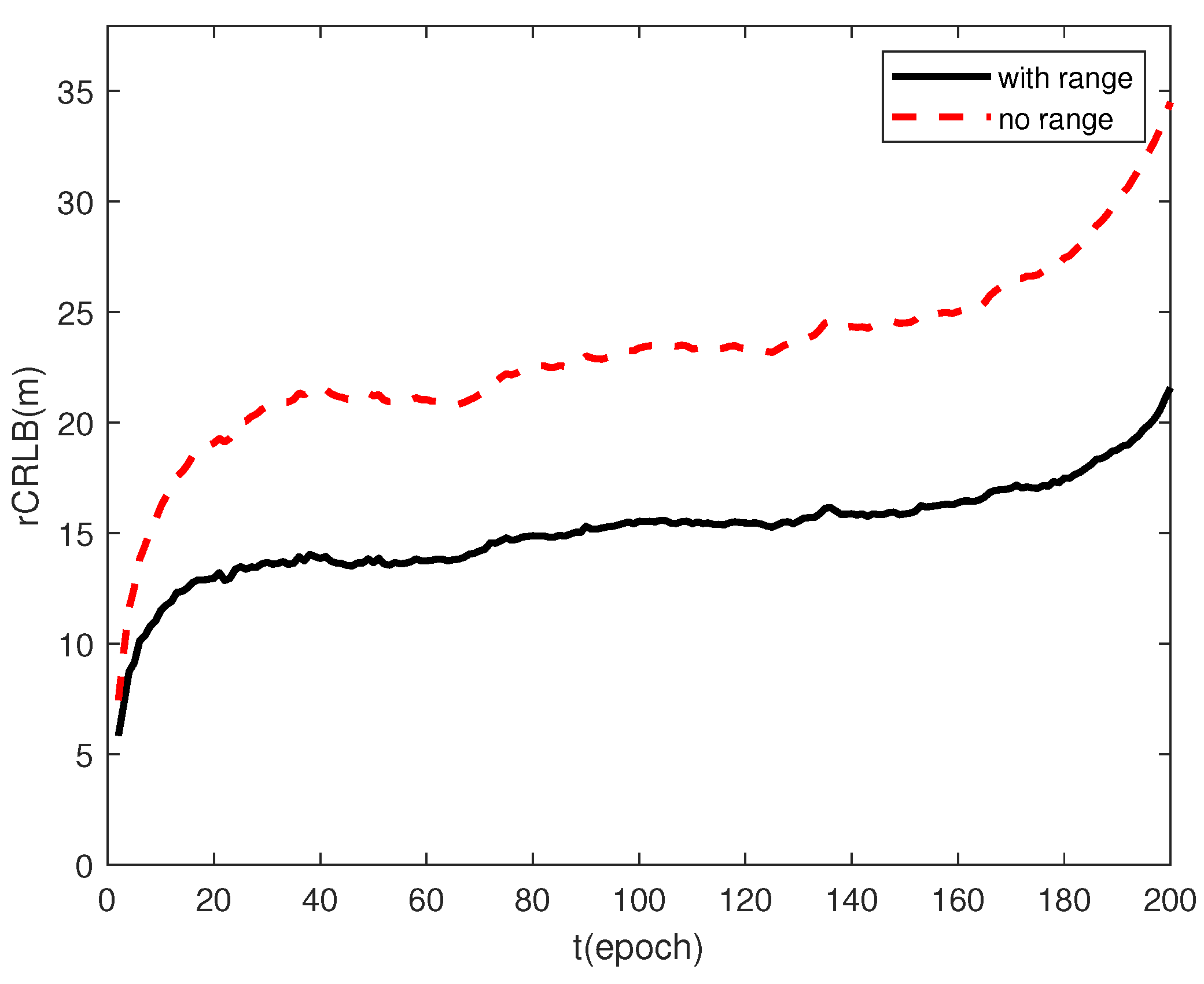
5.3. The Effect of the Range Measurement for CL: The Scenario of Large Baseline Cooperative Flying at High Altitudes
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kaufmann, E.; Bauersfeld, L.; Loquercio, A.; Müller, M.; Koltun, V.; Scaramuzza, D. Champion-Level Drone Racing Using Deep Reinforcement Learning. Nature 2023, 620, 982–987. [Google Scholar] [CrossRef]
- Loquercio, A.; Kaufmann, E.; Ranftl, R.; Müller, M.; Koltun, V.; Scaramuzza, D. Learning High-Speed Flight in the Wild. Sci. Robot. 2021, 6, eabg5810. [Google Scholar] [CrossRef] [PubMed]
- Yan, C.; Xiang, X.; Wang, C.; Lan, Z. Flocking and Collision Avoidance for a Dynamic Squad of Fixed-Wing UAVs Using Deep Reinforcement Learning. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4738–4744. [Google Scholar] [CrossRef]
- Yan, C.; Wang, C.; Xiang, X.; Lan, Z.; Jiang, Y. Deep Reinforcement Learning of Collision-Free Flocking Policies for Multiple Fixed-Wing UAVs Using Local Situation Maps. IEEE Trans. Ind. Inform. 2022, 18, 1260–1270. [Google Scholar] [CrossRef]
- Lu, K.; Hu, R.; Yao, Z.; Wang, H. Onboard Distributed Trajectory Planning through Intelligent Search for Multi-UAV Cooperative Flight. Drones 2023, 7, 16. [Google Scholar] [CrossRef]
- Yang, Y.; Xiong, X.; Yan, Y. UAV Formation Trajectory Planning Algorithms: A Review. Drones 2023, 7, 62. [Google Scholar] [CrossRef]
- Chung, S.J.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A Survey on Aerial Swarm Robotics. IEEE Trans. Robot. 2018, 34, 837–855. [Google Scholar] [CrossRef]
- Sun, Y.; Tan, Q.; Yan, C.; Chang, Y.; Xiang, X.; Zhou, H. Multi-UAV Coverage through Two-Step Auction in Dynamic Environments. Drones 2022, 6, 153. [Google Scholar] [CrossRef]
- Zhou, X.; Zhu, J.; Zhou, H.; Xu, C.; Gao, F. EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 4101–4107. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Y.; Wang, J.; Shen, Y. Distributed 3D Relative Localization of UAVs. IEEE Trans. Veh. Technol. 2020, 69, 11756–11770. [Google Scholar] [CrossRef]
- Shen, Y.; Win, M.Z. Fundamental Limits of Wideband Localization— Part I: A General Framework. IEEE Trans. Inf. Theory 2010, 56, 4956–4980. [Google Scholar] [CrossRef]
- Dai, W.; Shen, Y.; Win, M.Z. Distributed Power Allocation for Cooperative Wireless Network Localization. IEEE J. Sel. Areas Commun. 2015, 33, 28–40. [Google Scholar] [CrossRef]
- Lai, J.; Zhou, Y.; Lin, J.; Cong, Y.; Yang, J. Cooperative Localization Based on Efficient Covariance Intersection. IEEE Commun. Lett. 2019, 23, 871–874. [Google Scholar] [CrossRef]
- Caceres, M.A.; Penna, F.; Wymeersch, H.; Garello, R. Hybrid Cooperative Positioning Based on Distributed Belief Propagation. IEEE J. Sel. Areas Commun. 2011, 29, 1948–1958. [Google Scholar] [CrossRef]
- Funabiki, N.; Morrell, B.; Nash, J.; Agha-mohammadi, A.-a. Range-Aided Pose-Graph-Based SLAM: Applications of Deployable Ranging Beacons for Unknown Environment Exploration. IEEE Robot. Autom. Lett. 2021, 6, 48–55. [Google Scholar] [CrossRef]
- Etzlinger, B.; Wymeersch, H.; Springer, A. Cooperative Synchronization in Wireless Networks. IEEE Trans. Signal Process. 2014, 62, 2837–2849. [Google Scholar] [CrossRef]
- Ellingson, G.; Brink, K.; McLain, T. Relative Visual-Inertial Odometry for Fixed-Wing Aircraft in GPS-denied Environments. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 786–792. [Google Scholar] [CrossRef]
- Xu, L.; Shen, X.; Wang, L.; Shen, Y. A Distributed Relative Localization Scheme Based on Geometry Merging Priority. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 3995–4000. [Google Scholar] [CrossRef]
- Wang, N.; Chen, T.; Liu, S.; Wang, R.; Karimi, H.R.; Lin, Y. Deep Learning-Based Visual Detection of Marine Organisms: A Survey. Neurocomputing 2023, 532, 1–32. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.; Tardós, J.D. ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM. arXiv 2020, arXiv:2007.11898. [Google Scholar] [CrossRef]
- Mourikis, A.I.; Roumeliotis, S.I. A Multi-State Constraint Kalman Filter for Vision-Aided Inertial Navigation. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 3565–3572. [Google Scholar]
- Xu, H.; Zhang, Y.; Zhou, B.; Wang, L.; Yao, X.; Meng, G.; Shen, S. Omni-Swarm: A Decentralized Omnidirectional Visual–Inertial–UWB State Estimation System for Aerial Swarms. IEEE Trans. Robot. 2022, 38, 3374–3394. [Google Scholar] [CrossRef]
- Lajoie, P.Y.; Ramtoula, B.; Wu, F.; Beltrame, G. Towards Collaborative Simultaneous Localization and Mapping: A Survey of the Current Research Landscape. Field Robot. 2022, 2, 971–1000. [Google Scholar] [CrossRef]
- Zhang, Z.; Scaramuzza, D. Beyond Point Clouds: Fisher Information Field for Active Visual Localization. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5986–5992. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, S.; Zhao, L.; Dissanayake, G. Cramér–Rao Bounds and Optimal Design Metrics for Pose-Graph SLAM. IEEE Trans. Robot. 2021, 37, 627–641. [Google Scholar] [CrossRef]
- Khosoussi, K.; Giamou, M.; Sukhatme, G.S.; Huang, S.; Dissanayake, G.; How, J.P. Reliable Graphs for SLAM. Int. J. Robot. Res. 2019, 38, 260–298. [Google Scholar] [CrossRef]
- Khosoussi, K.; Huang, S.; Dissanayake, G. Novel Insights into the Impact of Graph Structure on SLAM. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2707–2714. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, L.; Lee, K.M.B.; Yoo, C.; Huang, S.; Fitch, R. Broadcast Your Weaknesses: Cooperative Active Pose-Graph SLAM for Multiple Robots. IEEE Robot. Autom. Lett. 2020, 5, 2200–2207. [Google Scholar] [CrossRef]
- Kontitsis, M.; Theodorou, E.A.; Todorov, E. Multi-Robot Active SLAM with Relative Entropy Optimization. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2757–2764. [Google Scholar] [CrossRef]
- Boumal, N.; Singer, A.; Absil, P.A.; Blondel, V.D. Cramér–Rao Bounds for Synchronization of Rotations. Inf. Inference A J. IMA 2014, 3, 1–39. [Google Scholar] [CrossRef]
- Boumal, N. On Intrinsic Cramér-Rao Bounds for Riemannian Submanifolds and Quotient Manifolds. IEEE Trans. Signal Process. 2013, 61, 1809–1821. [Google Scholar] [CrossRef]
- Engel, J.; Sturm, J.; Cremers, D. Semi-Dense Visual Odometry for a Monocular Camera. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1449–1456. [Google Scholar] [CrossRef]
- Wendel, A.; Maurer, M.; Graber, G.; Pock, T.; Bischof, H. Dense Reconstruction On-the-Fly. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1450–1457. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. Vins-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Best, D.J.; Fisher, N.I. Efficient Simulation of the von Mises Distribution. J. R. Stat. Soc. Ser. C (Appl. Stat.) 1979, 28, 152–157. [Google Scholar] [CrossRef]
- Ash, J.N.; Moses, R.L. On the Relative and Absolute Positioning Errors in Self-Localization Systems. IEEE Trans. Signal Process. 2008, 56, 5668–5679. [Google Scholar] [CrossRef]
- Karrer, M.; Chli, M. Distributed Variable-Baseline Stereo SLAM from Two UAVs. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 82–88. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, J.; Liu, S.; Xiang, X.; Li, C.; Tang, D.; Zhou, H. Performance Analysis of Visual–Inertial–Range Cooperative Localization for Unmanned Autonomous Vehicle Swarm. Drones 2023, 7, 651. https://doi.org/10.3390/drones7110651
Lai J, Liu S, Xiang X, Li C, Tang D, Zhou H. Performance Analysis of Visual–Inertial–Range Cooperative Localization for Unmanned Autonomous Vehicle Swarm. Drones. 2023; 7(11):651. https://doi.org/10.3390/drones7110651
Chicago/Turabian StyleLai, Jun, Suyang Liu, Xiaojia Xiang, Chaoran Li, Dengqing Tang, and Han Zhou. 2023. "Performance Analysis of Visual–Inertial–Range Cooperative Localization for Unmanned Autonomous Vehicle Swarm" Drones 7, no. 11: 651. https://doi.org/10.3390/drones7110651
APA StyleLai, J., Liu, S., Xiang, X., Li, C., Tang, D., & Zhou, H. (2023). Performance Analysis of Visual–Inertial–Range Cooperative Localization for Unmanned Autonomous Vehicle Swarm. Drones, 7(11), 651. https://doi.org/10.3390/drones7110651