
LiDAR Based Detect and Avoid System for UAV Navigation in UAM Corridors




Abstract
:1. Introduction
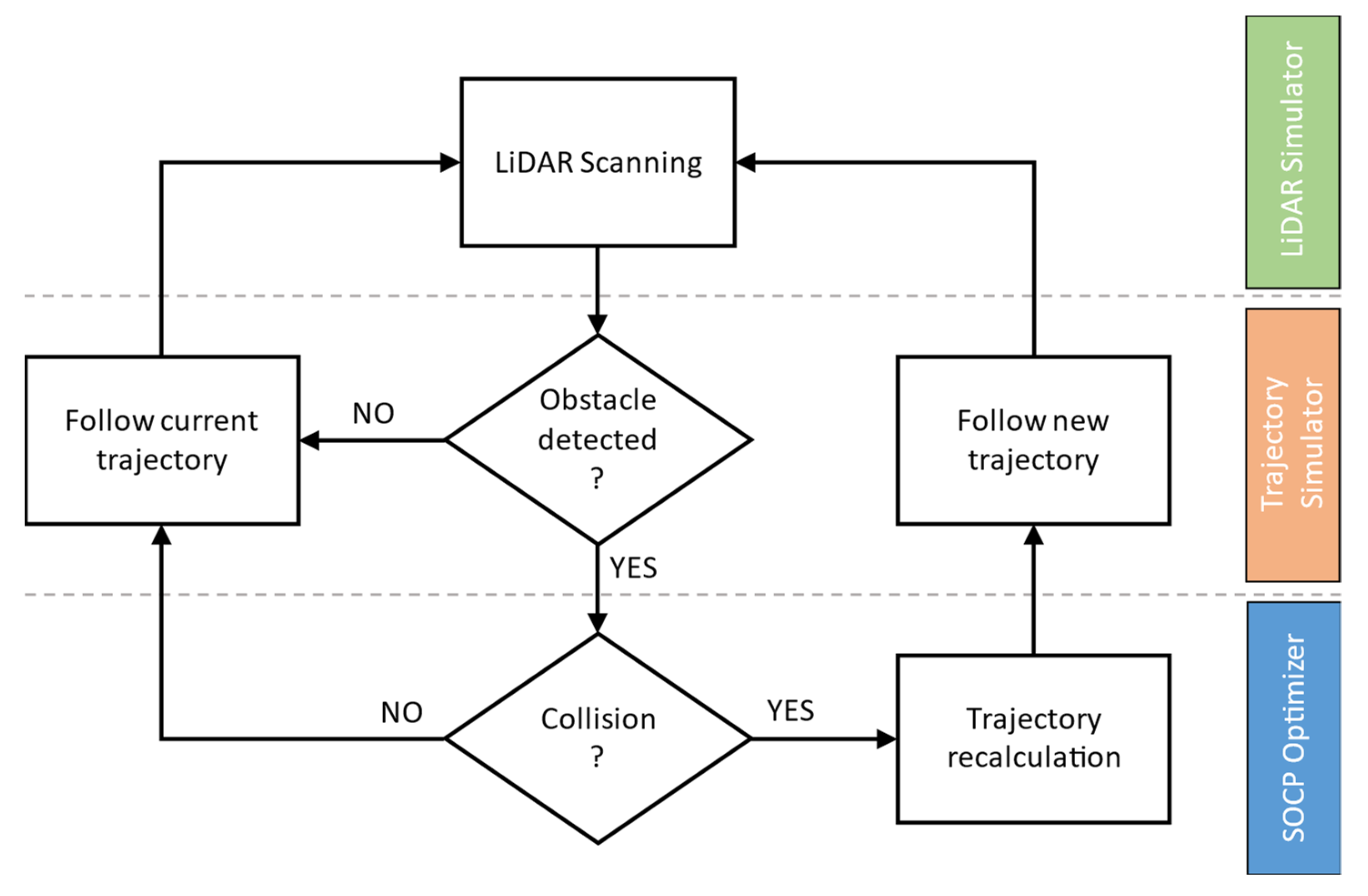
2. Methodology
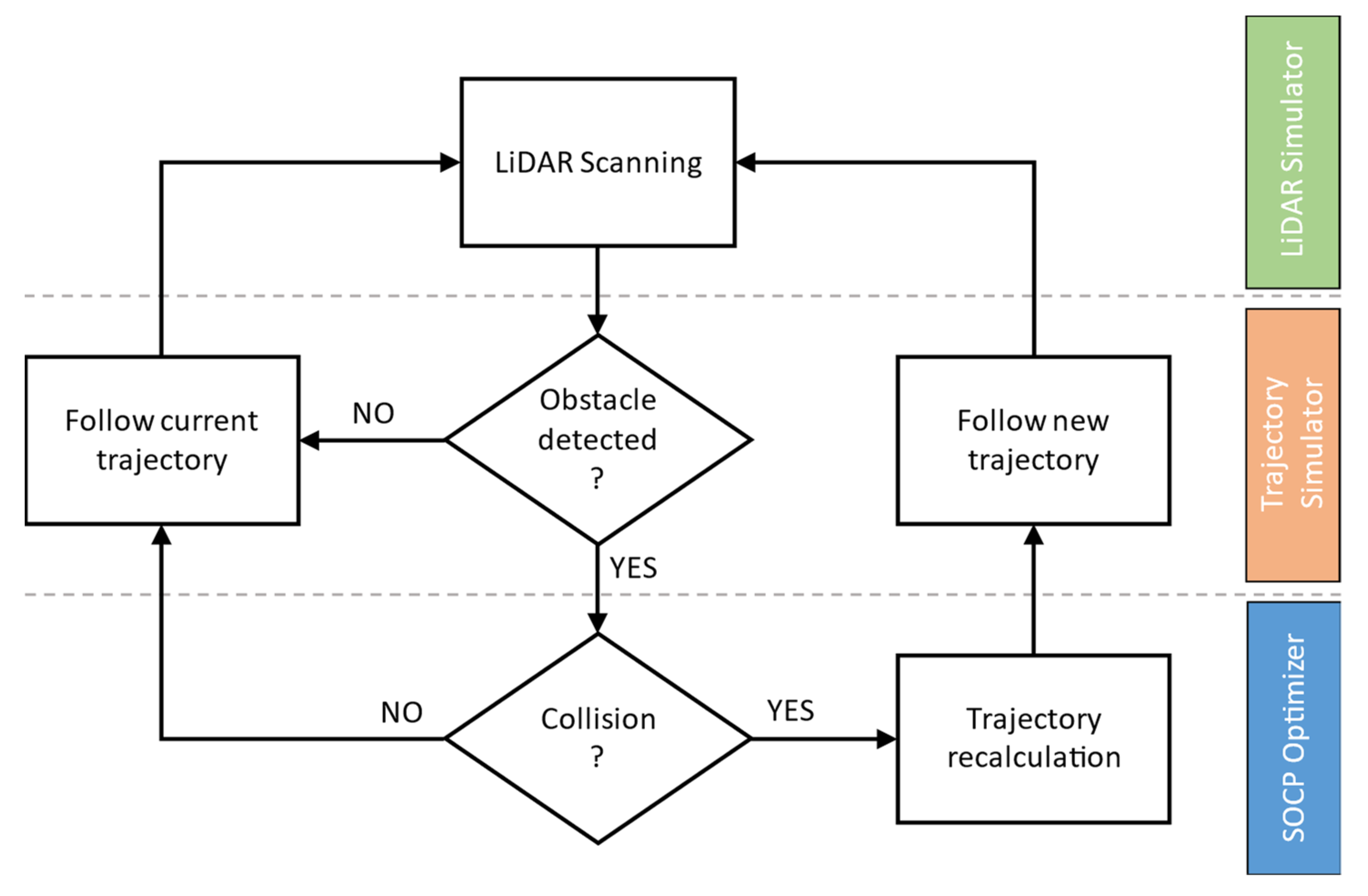
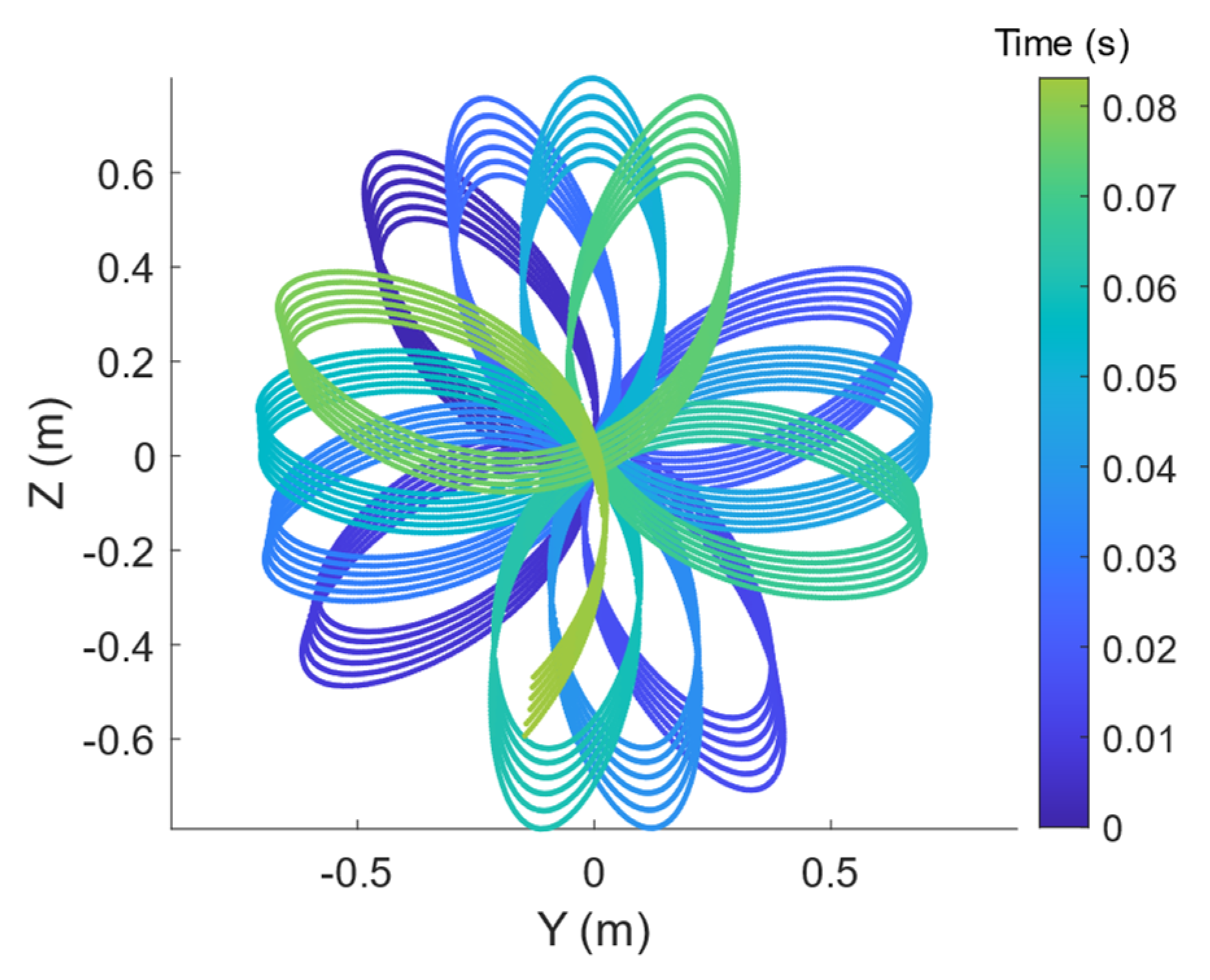
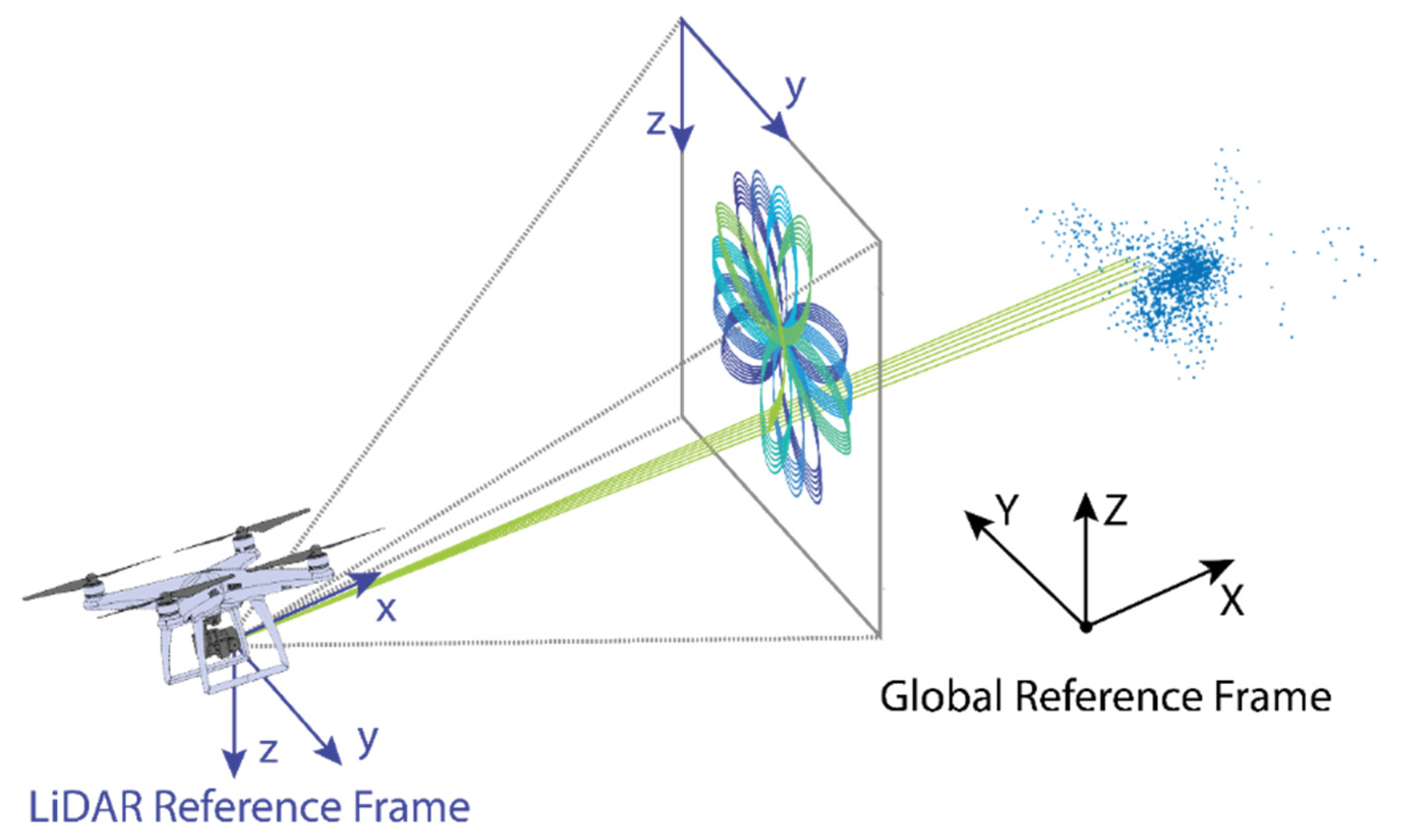
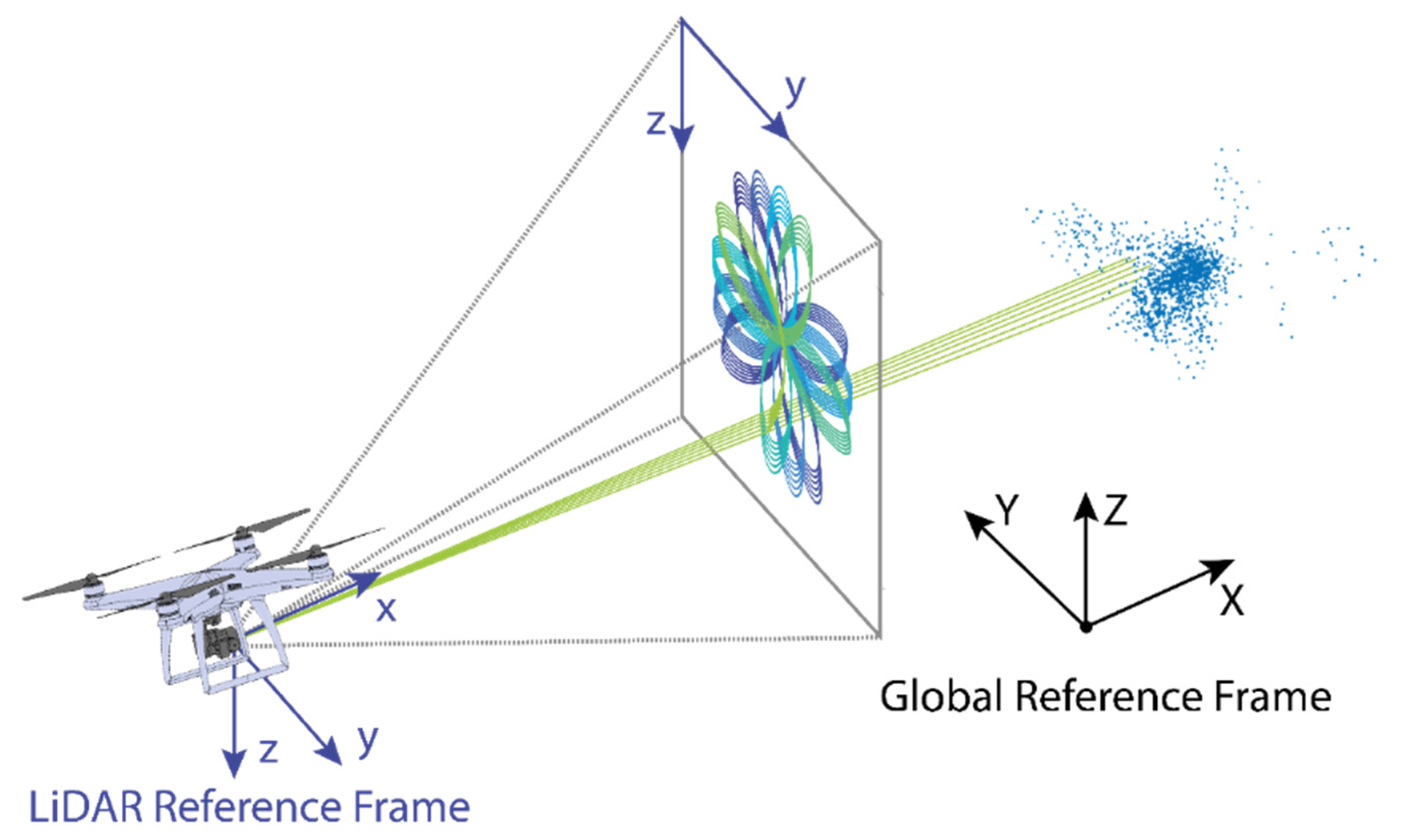
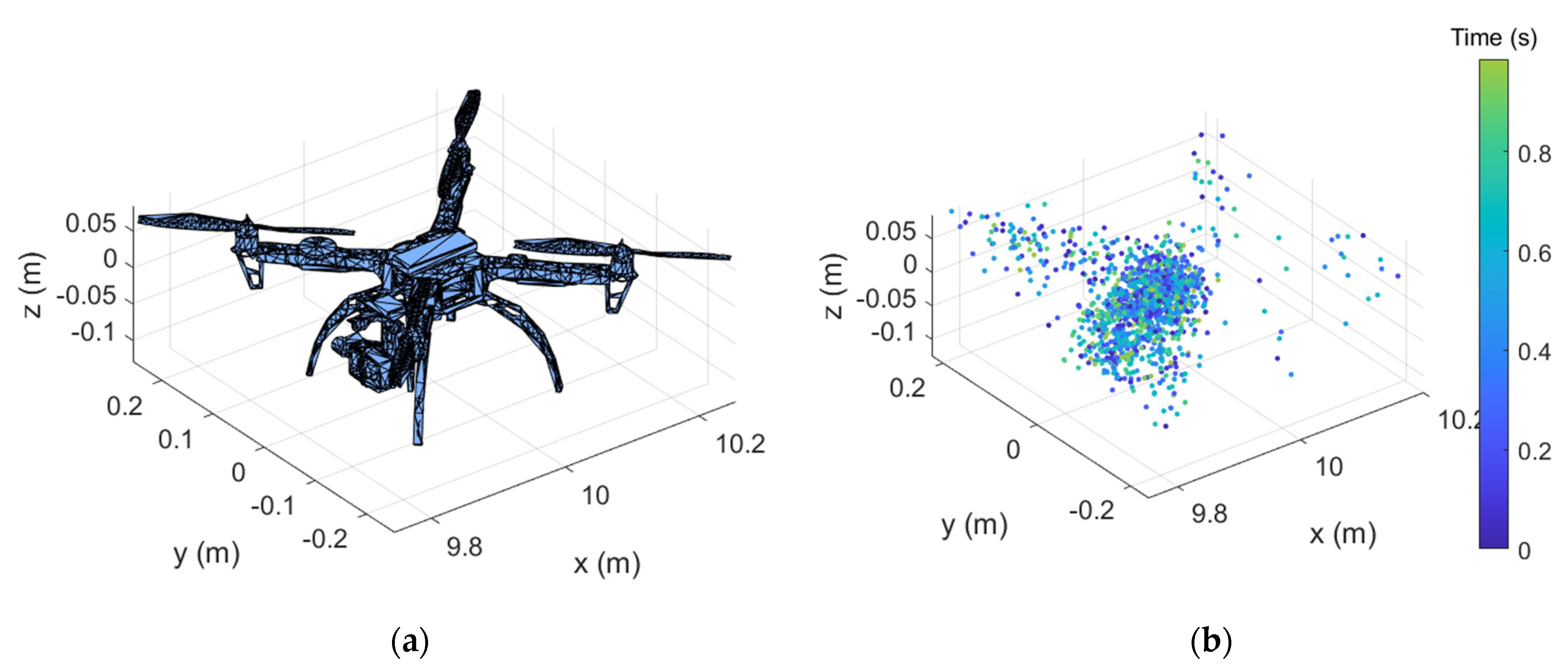
2.1. LiDAR Simulation
2.2. SOCP Collision Avoidance Algorithm
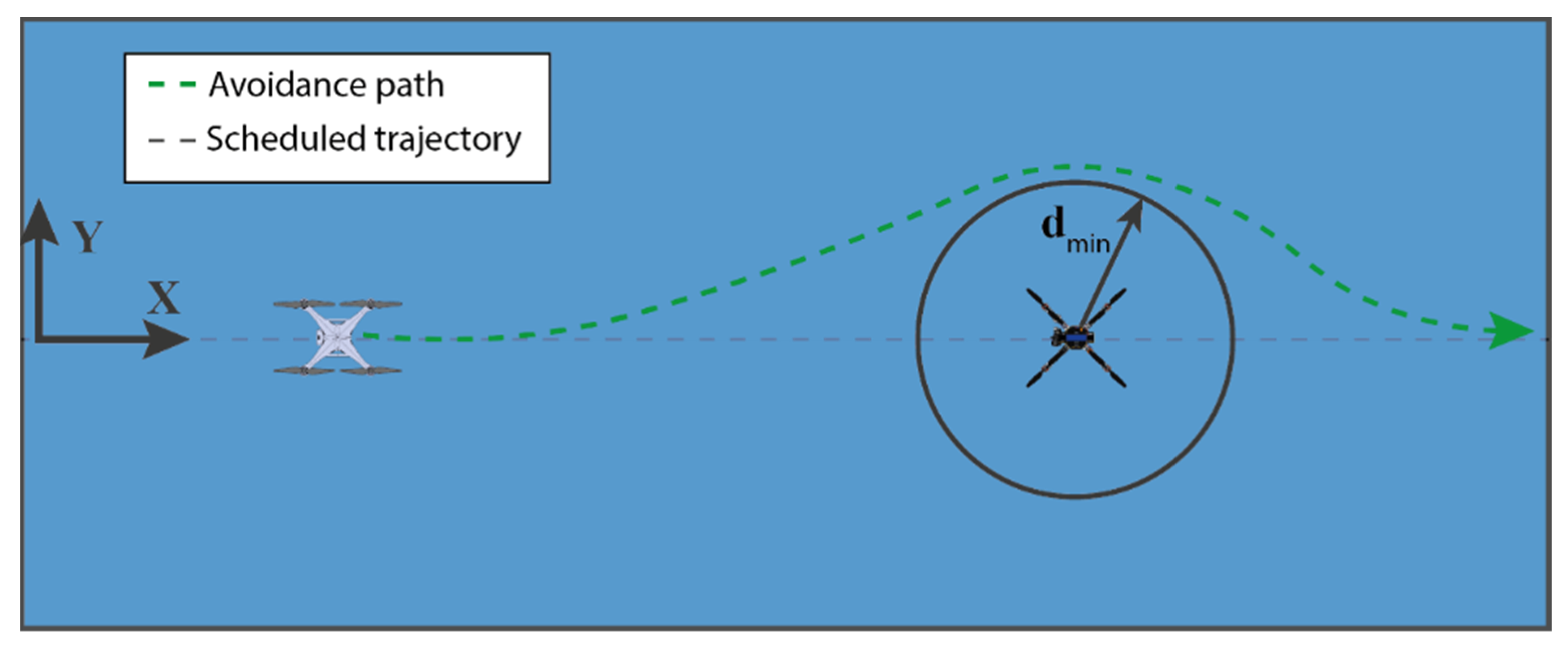
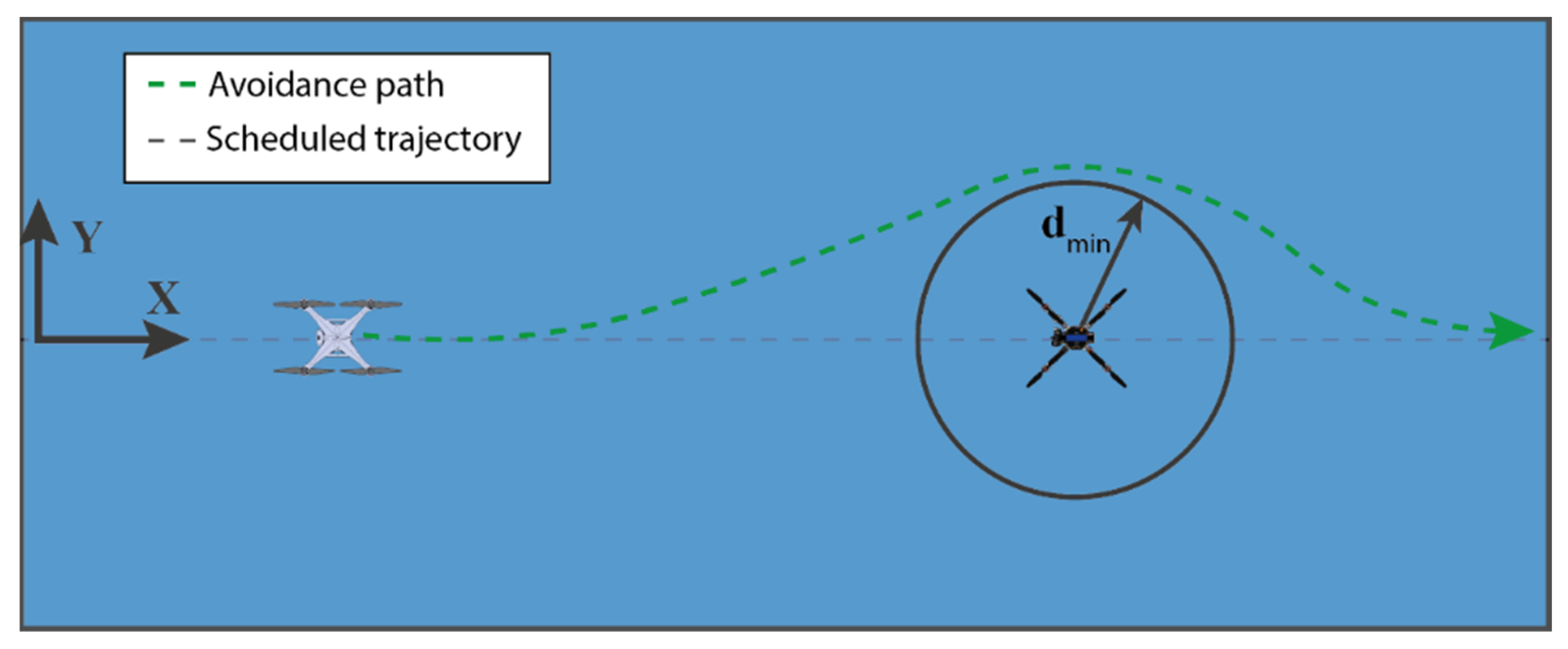
2.2.1. Navigation Environment of the UAV
2.2.2. SOCP Formulation
3. Results
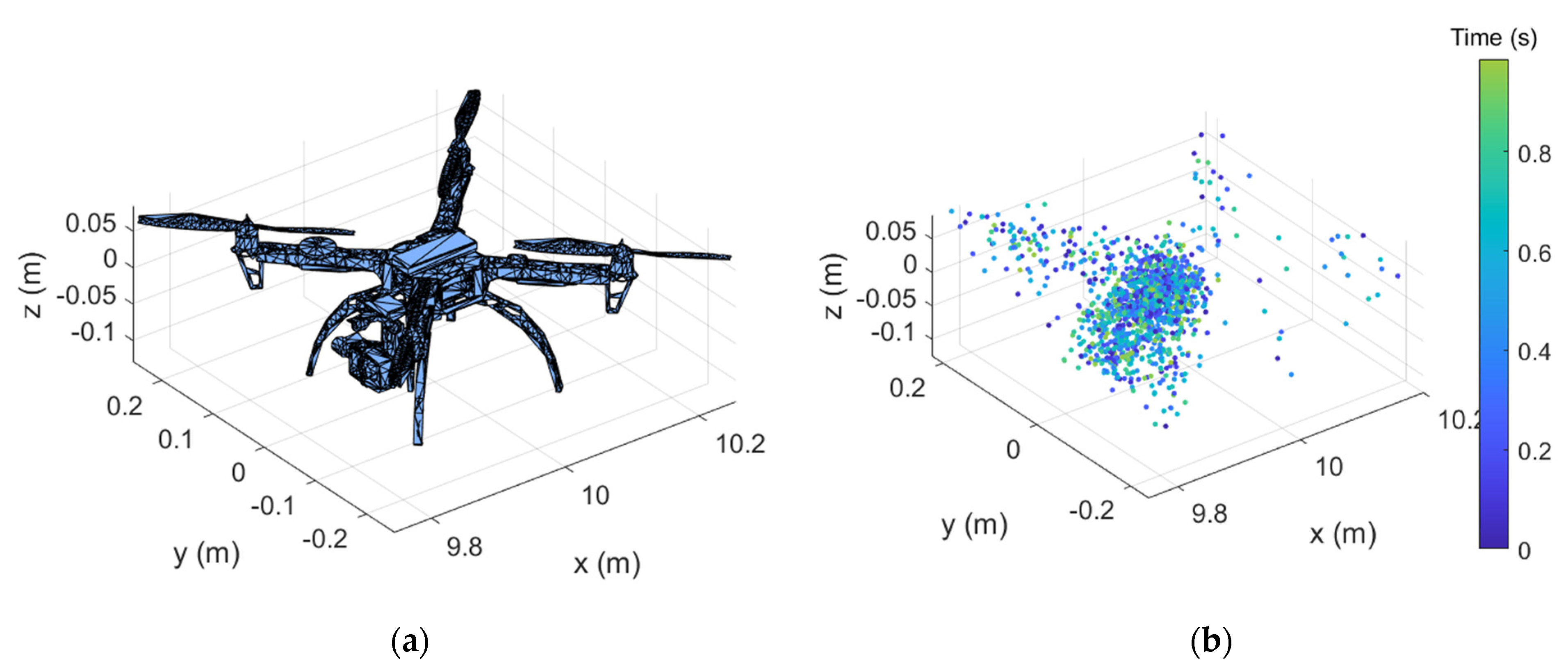
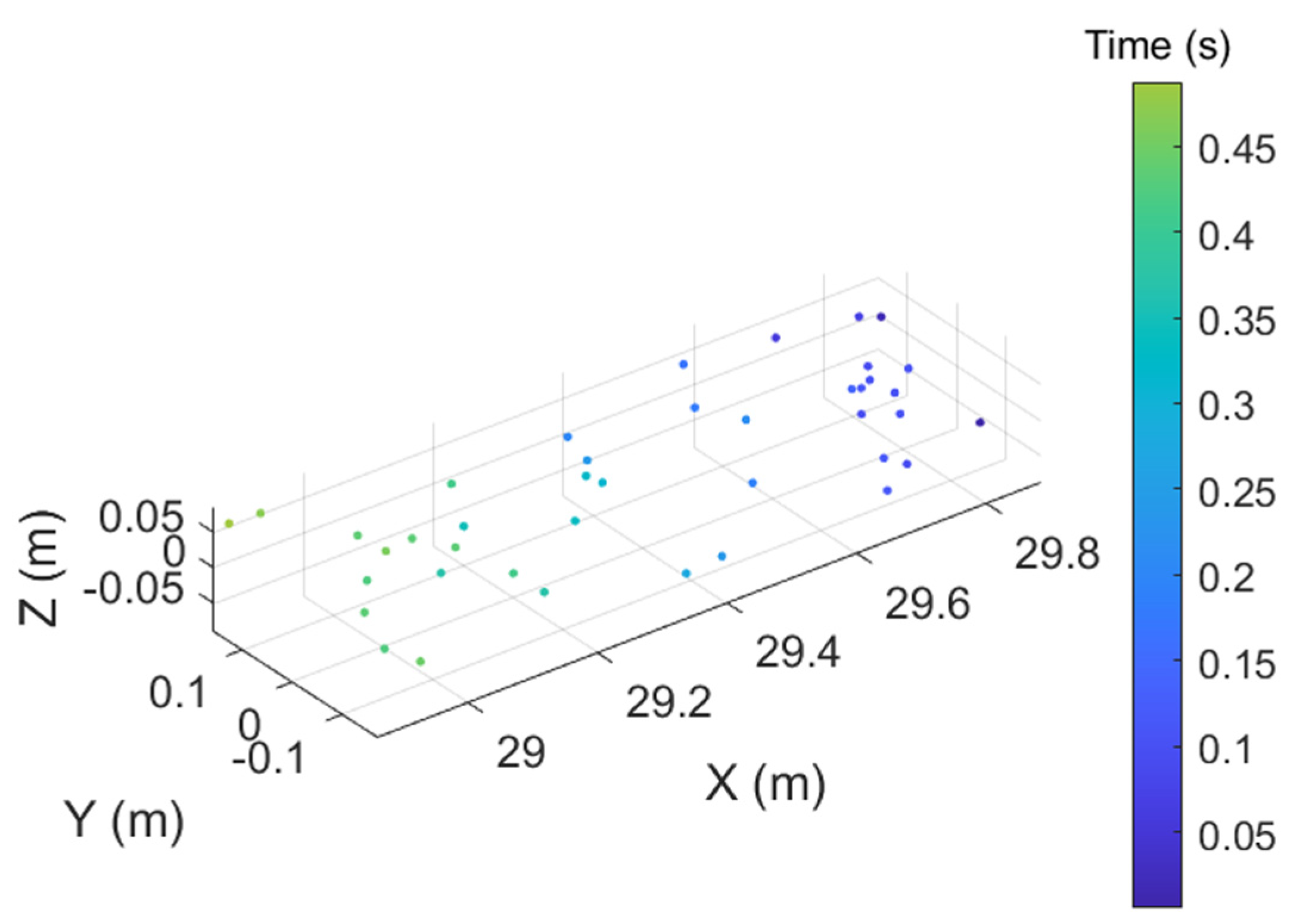
3.1. LiDAR System Detection Capabilities
3.2. Avoidance Maneuvers
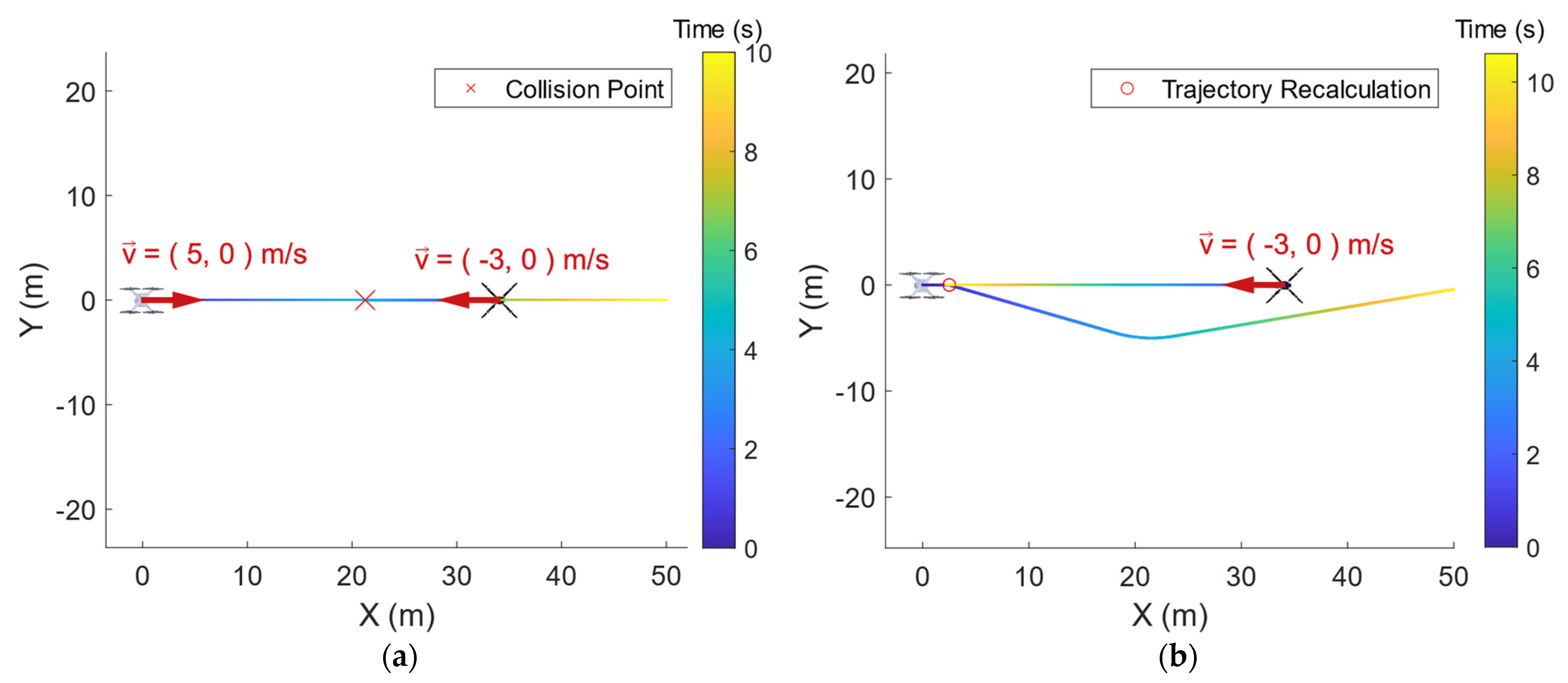
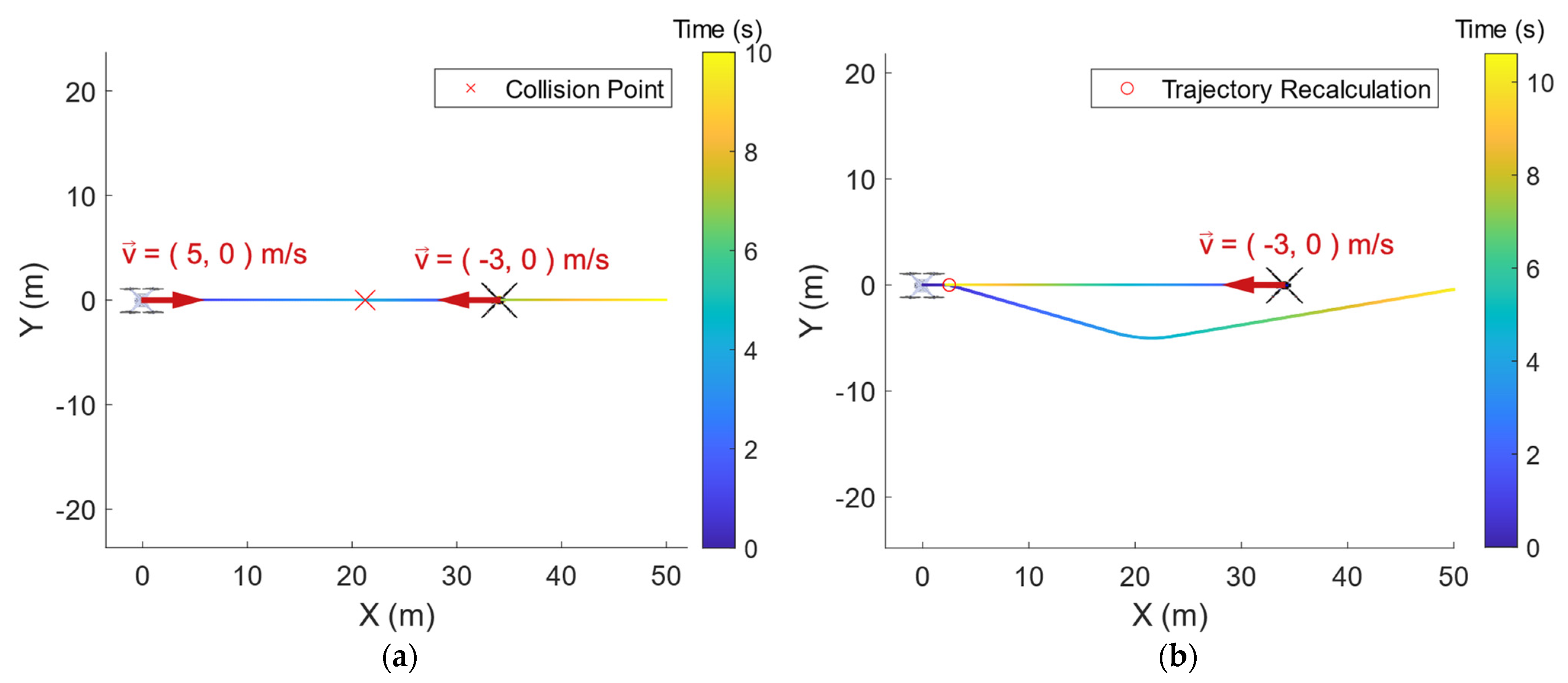
3.2.1. Colinear Obstacle
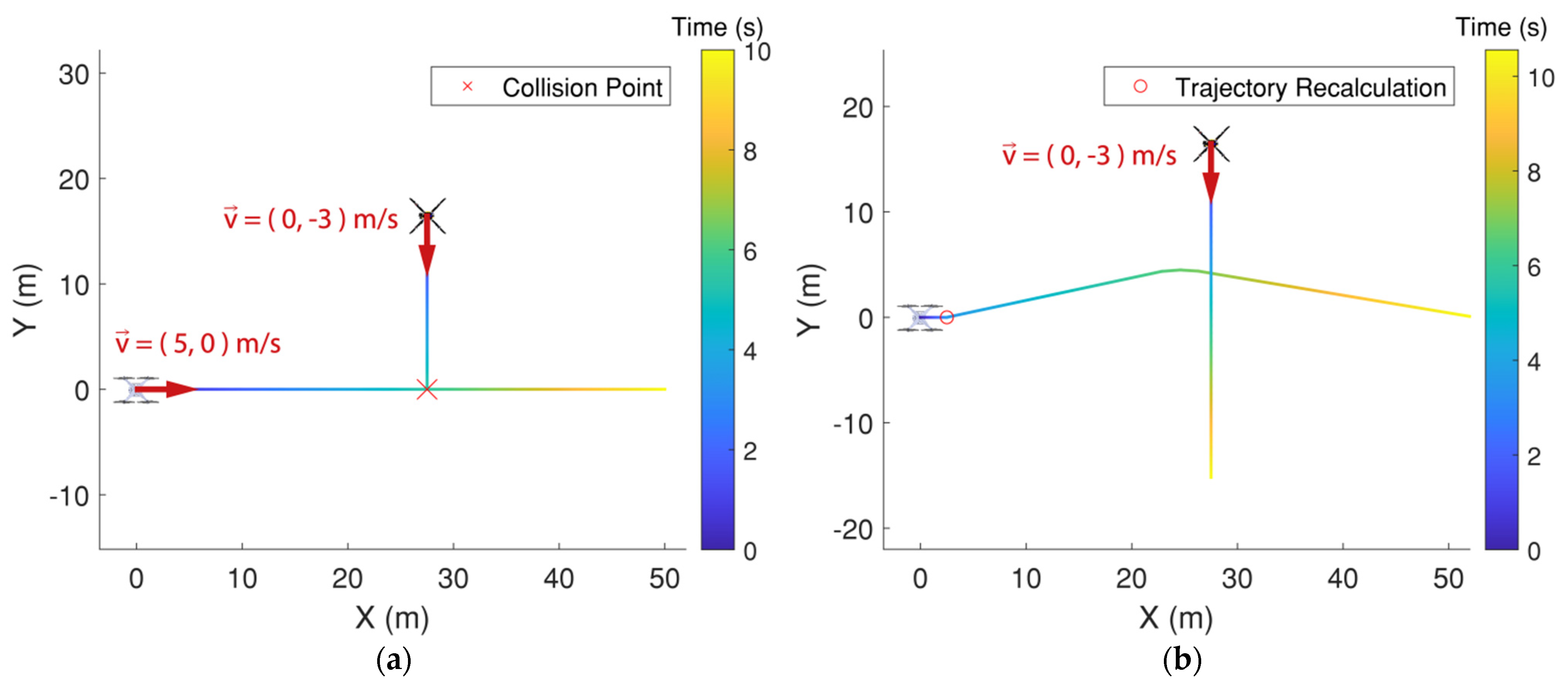
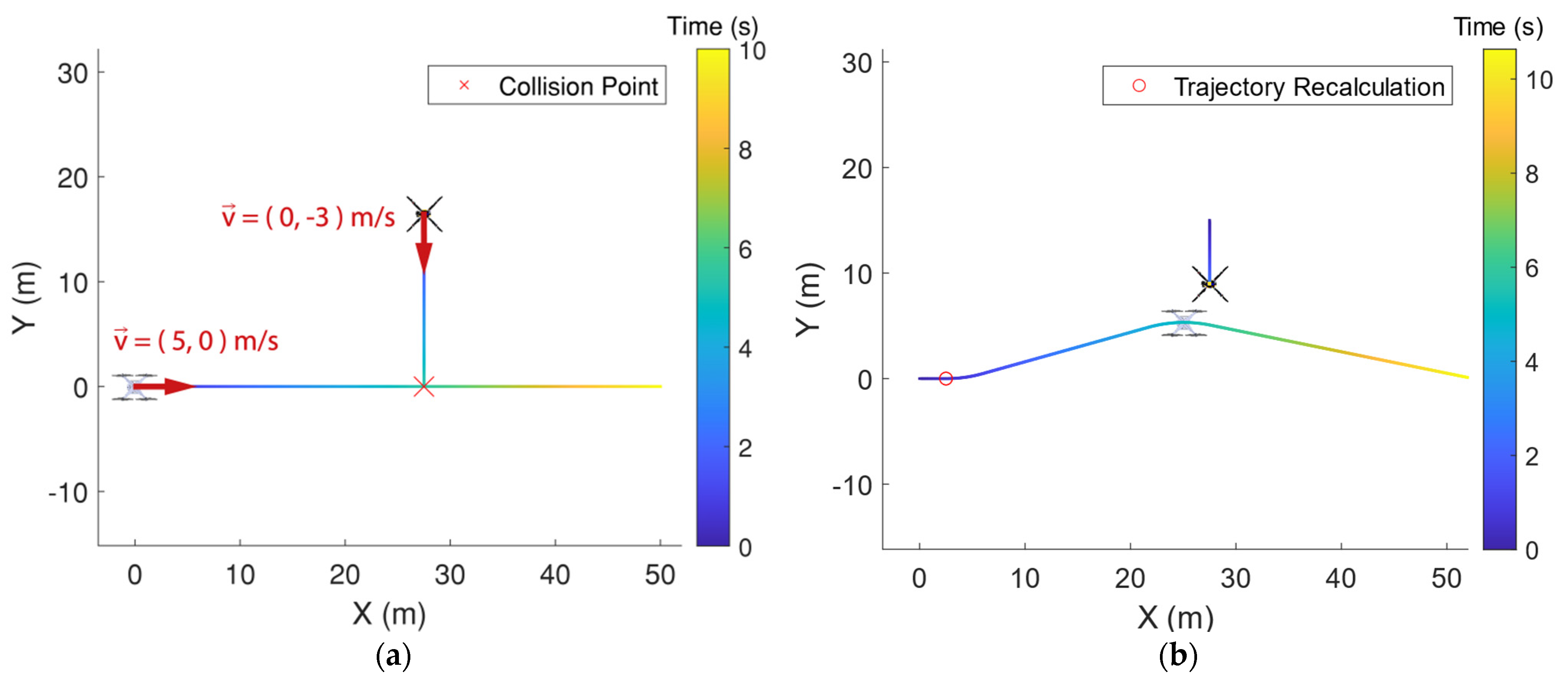
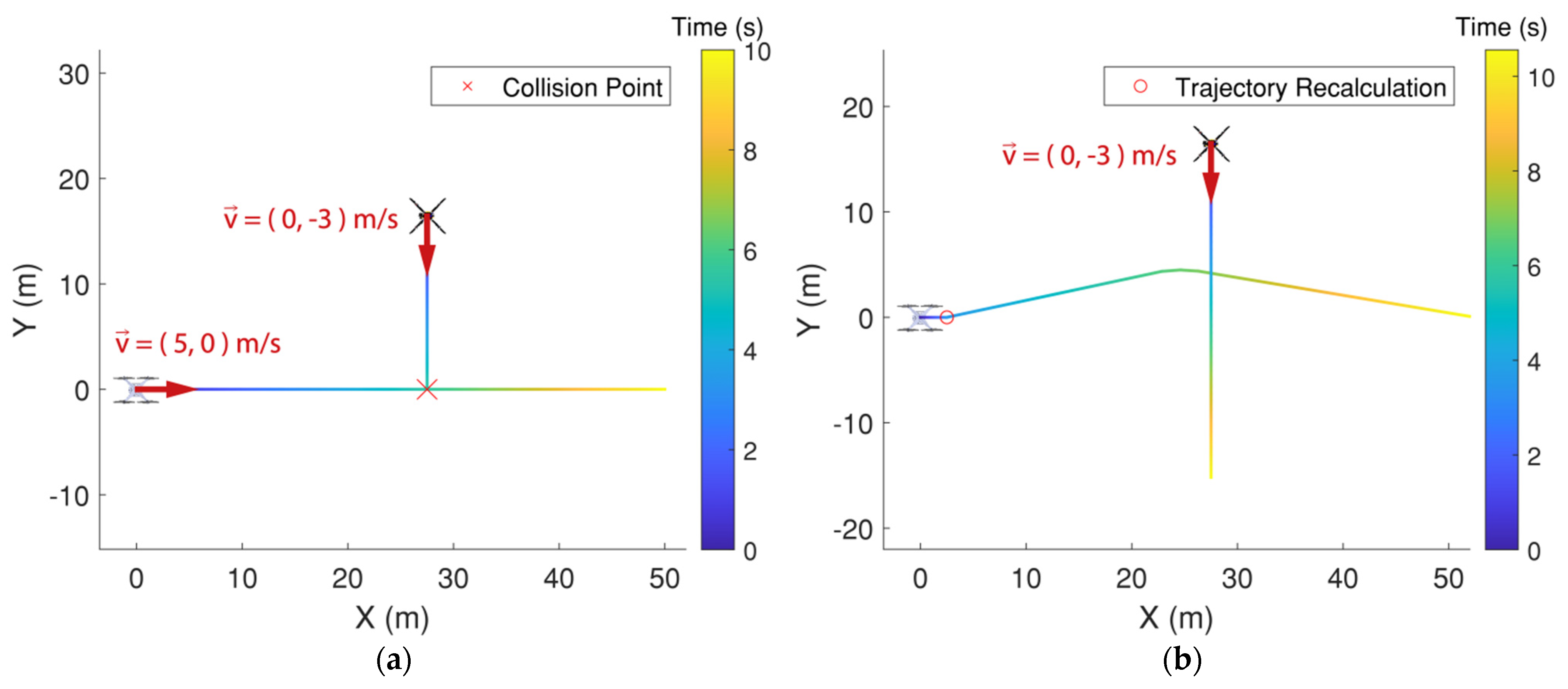
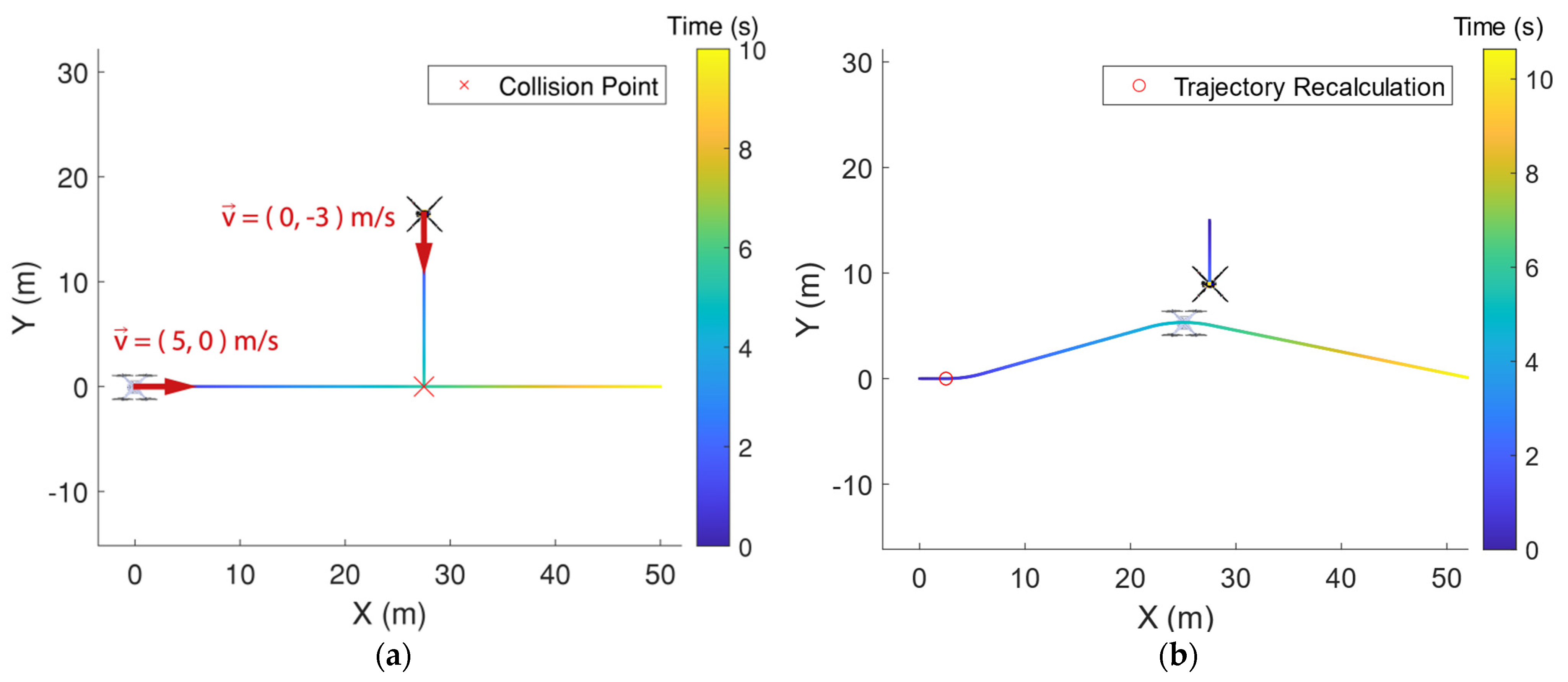
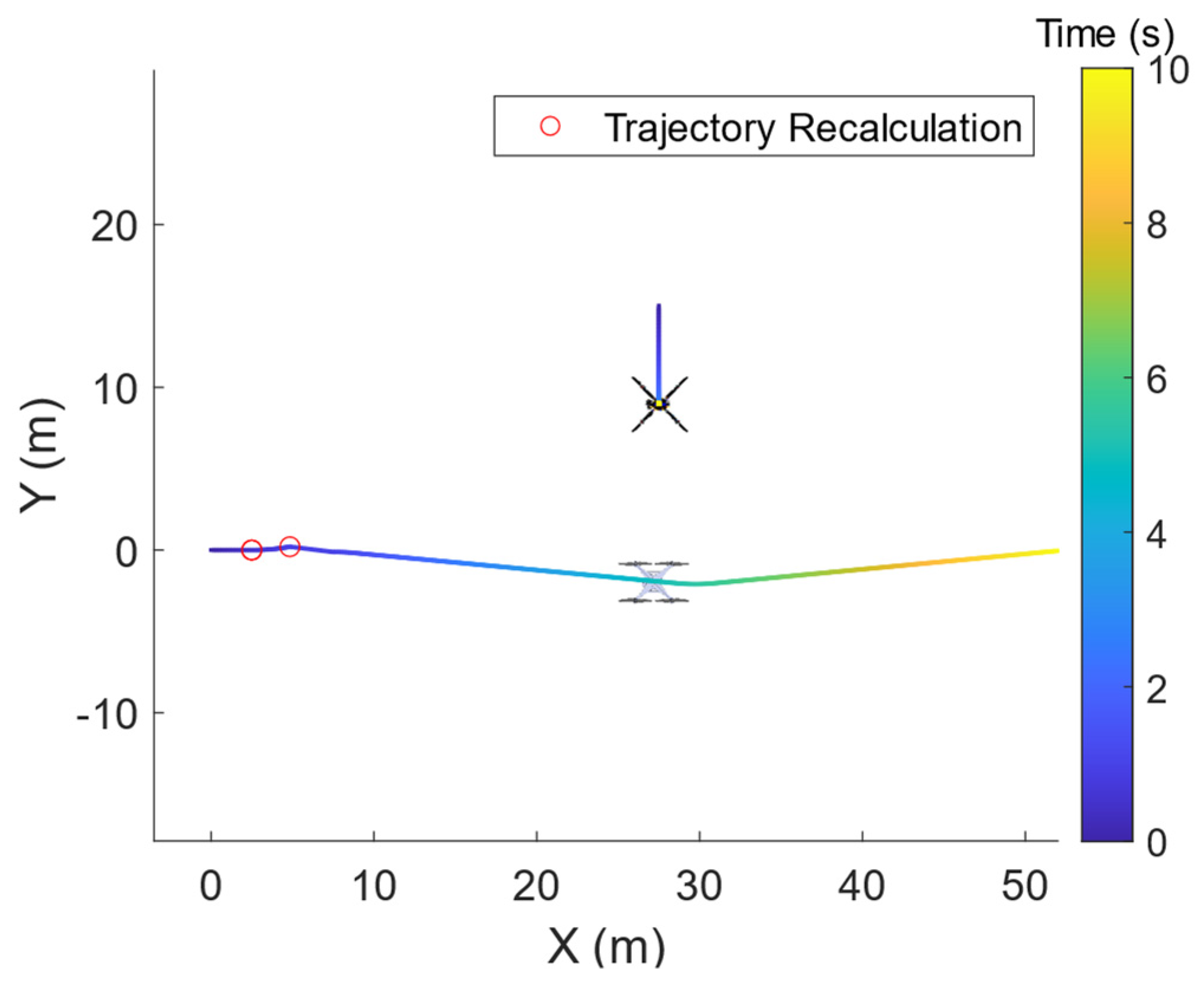
3.2.2. Perpendicular Obstacle
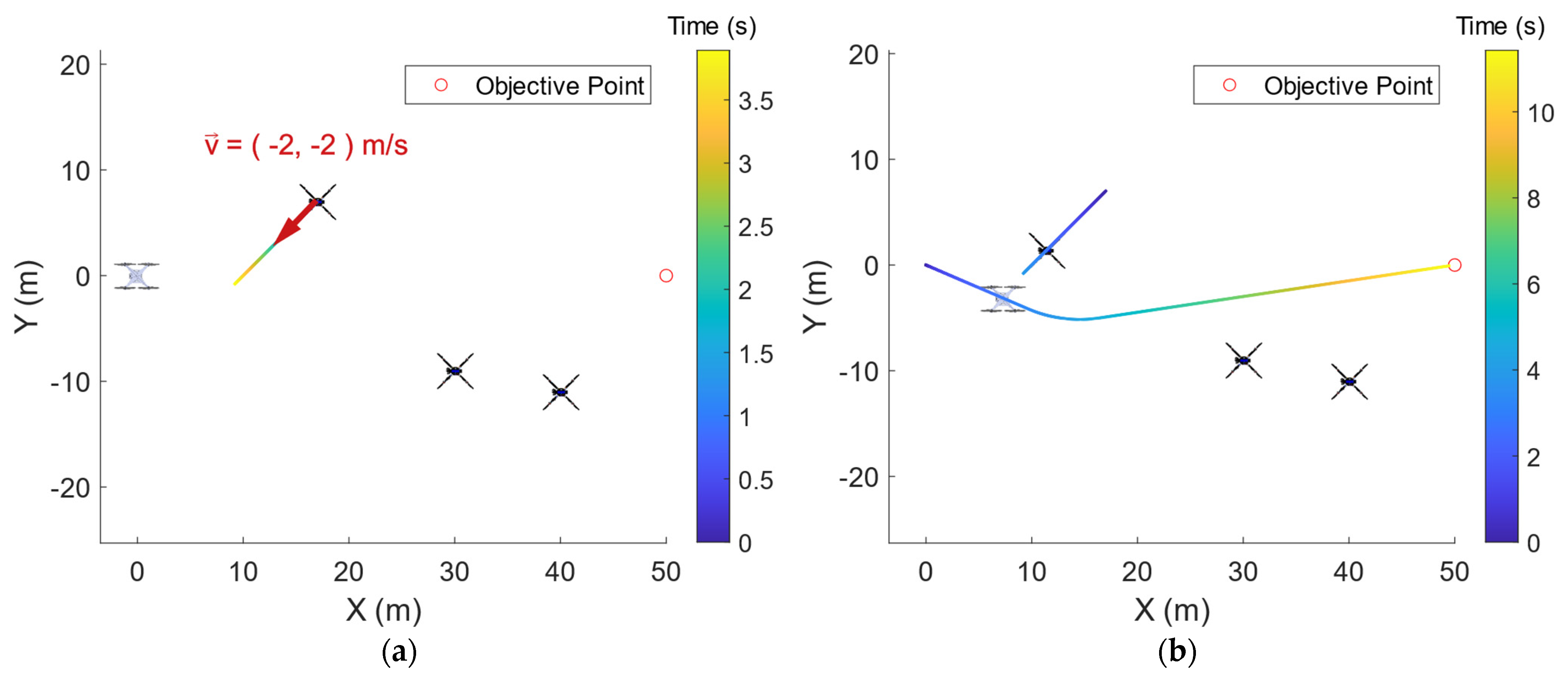
3.2.3. Obstacle with Acceleration
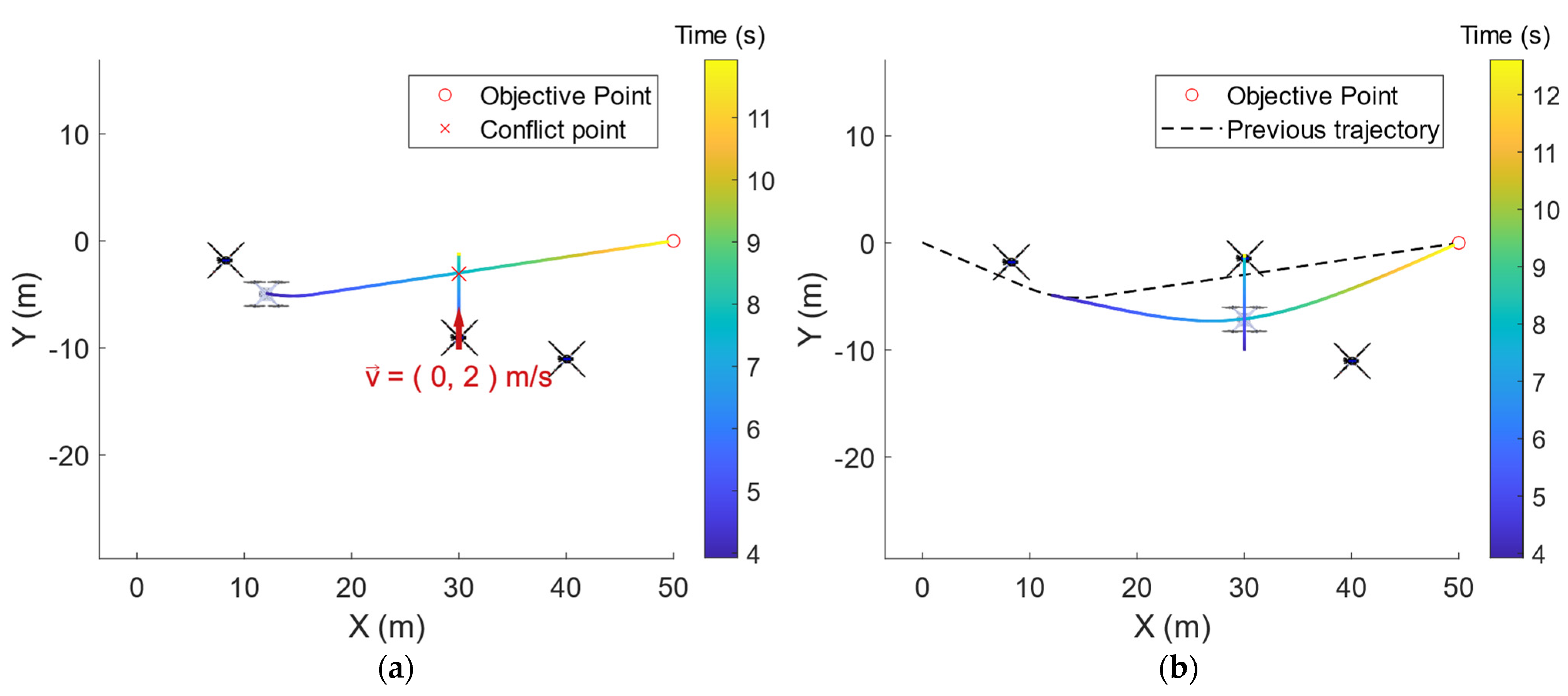
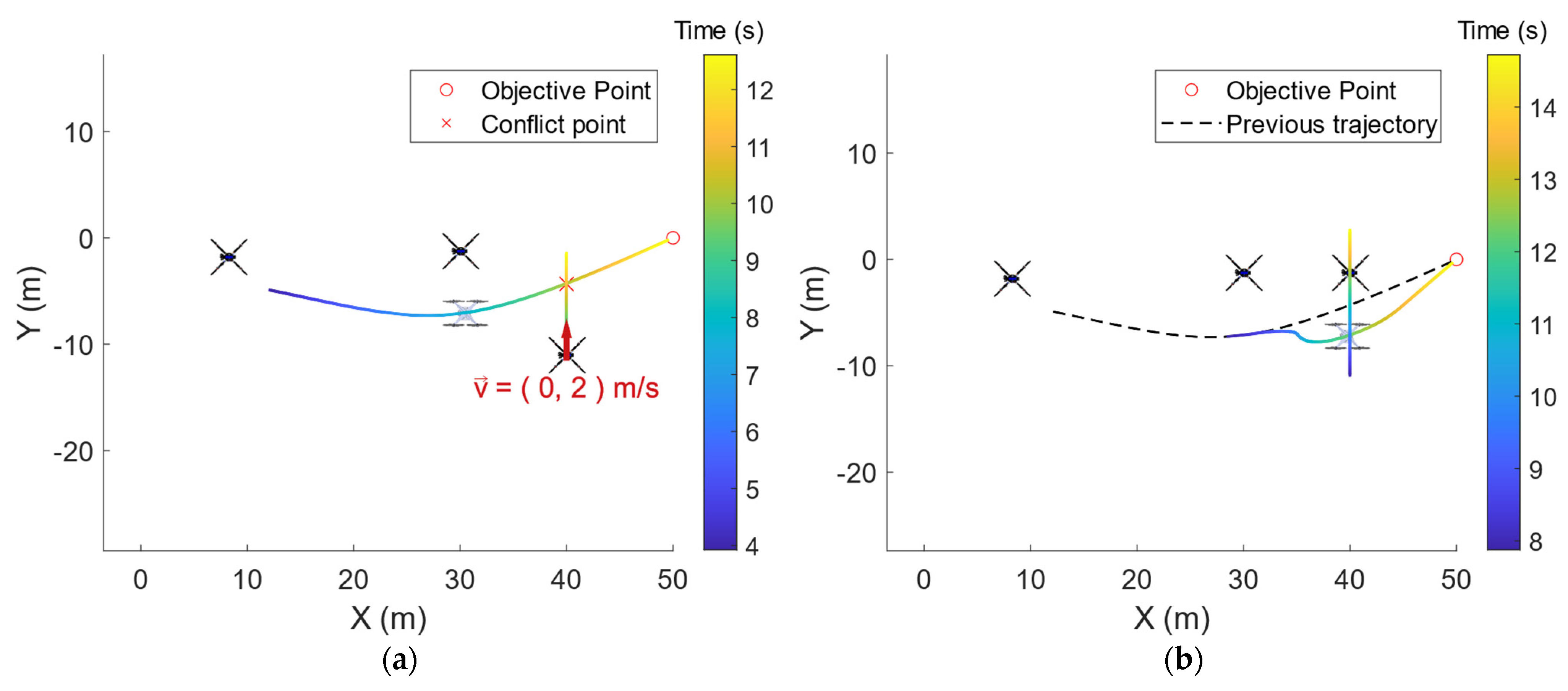
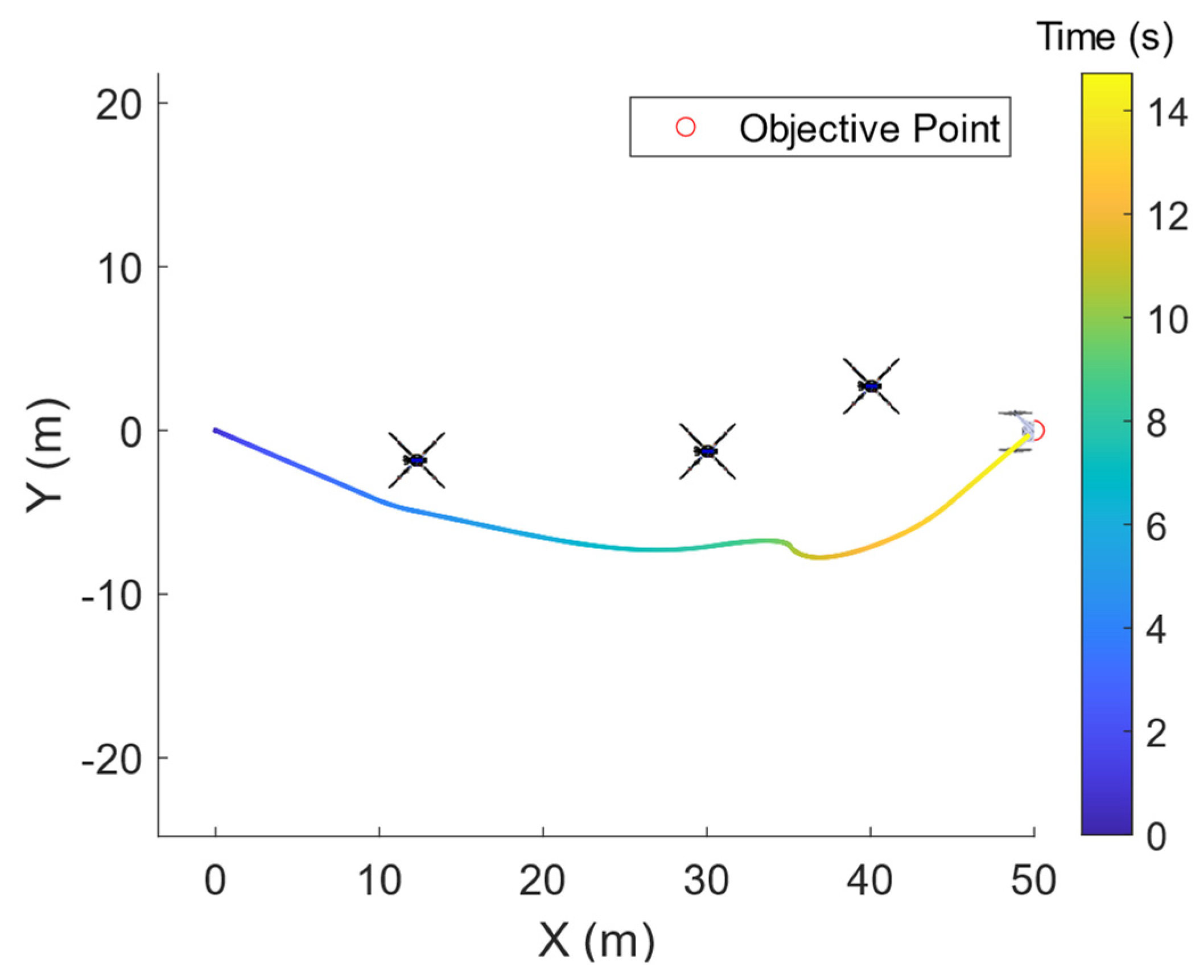
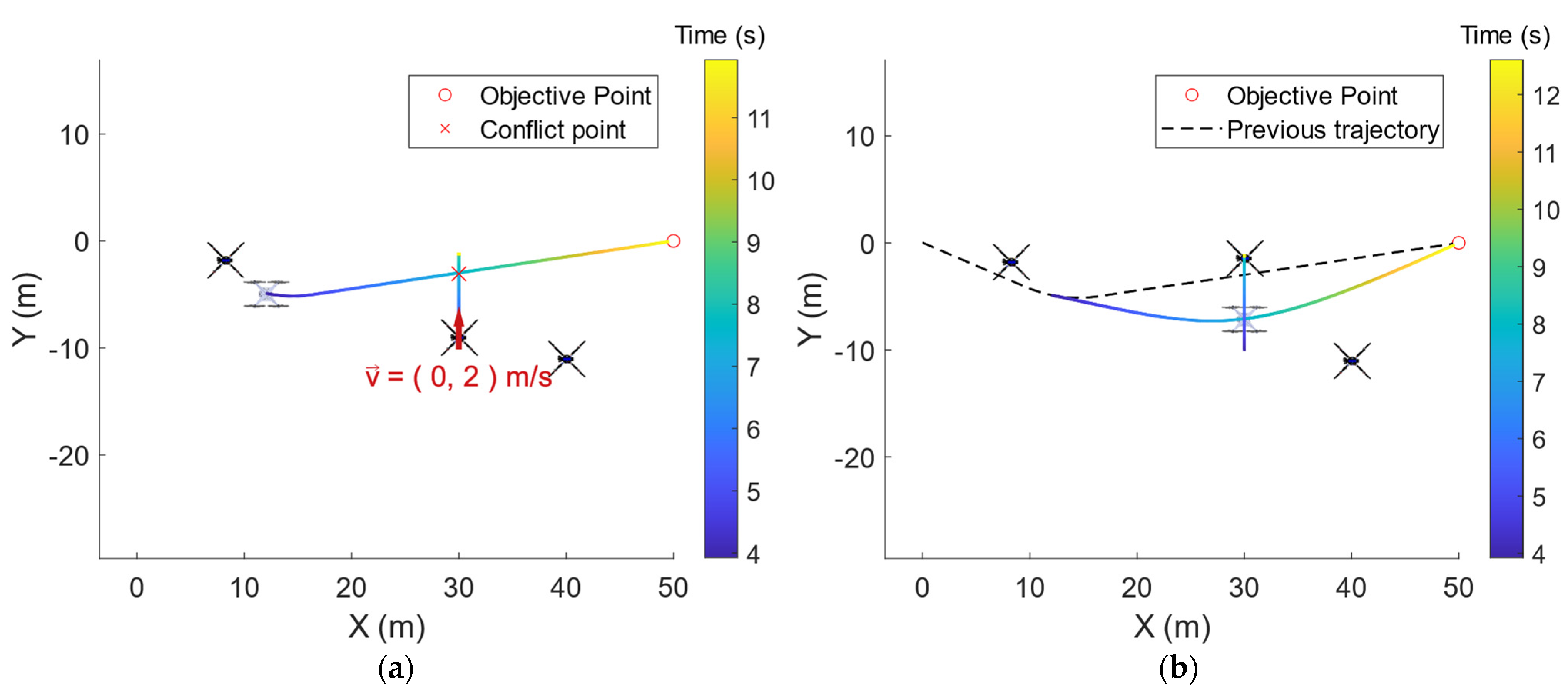
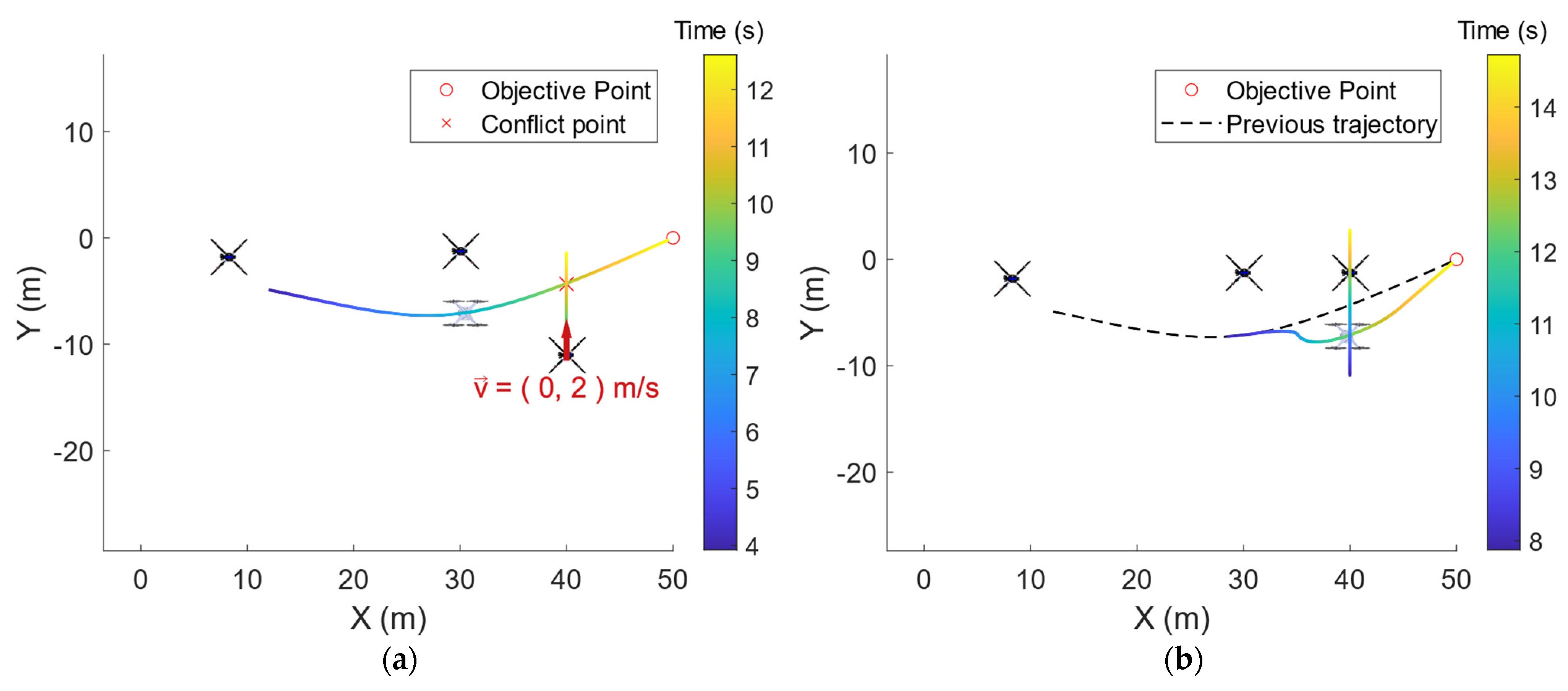
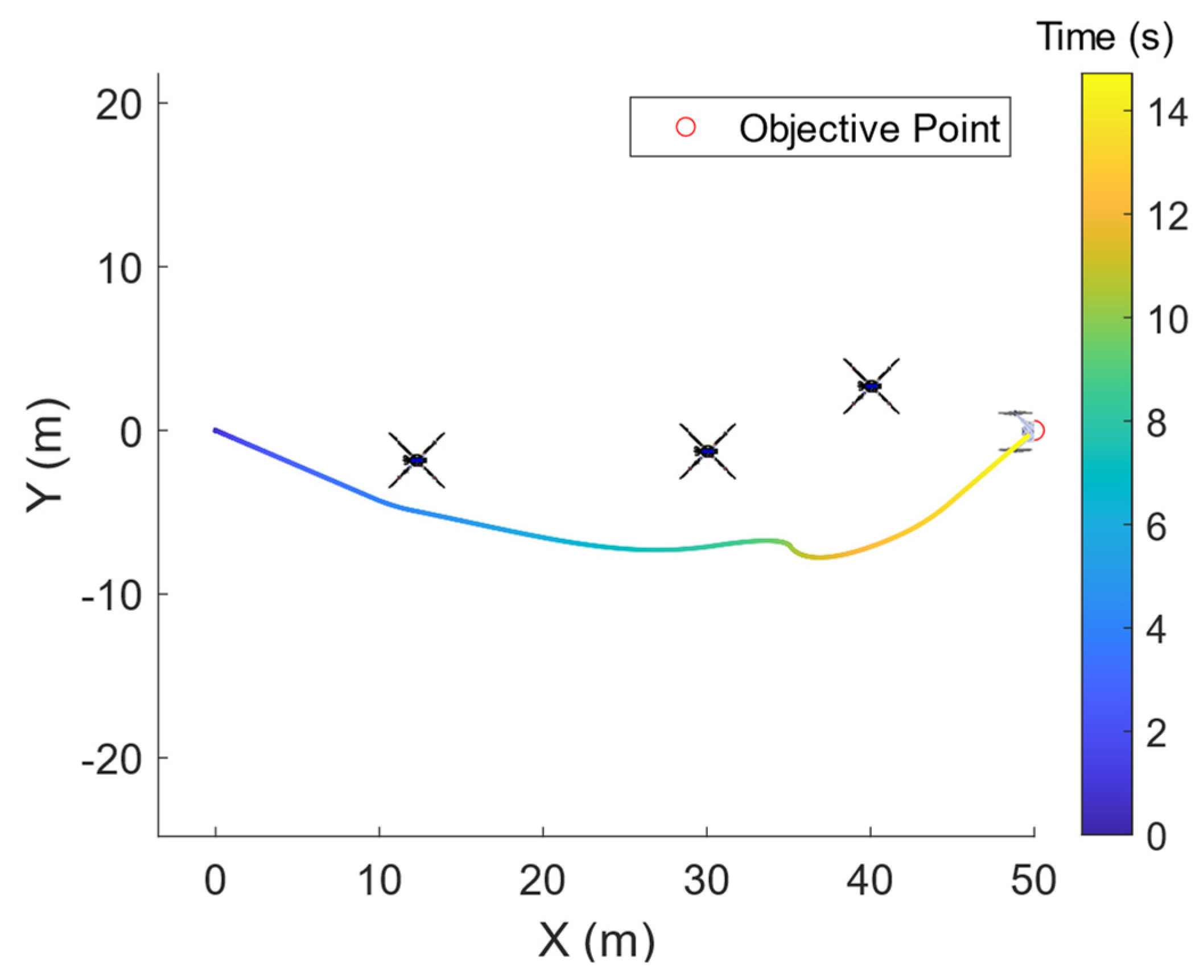
3.2.4. Dynamic Scenario
3.3. Computation Time
4. Conclusions
- The position and speed of the obstacles were correctly measured employing the point clouds from the LiDAR sensor.
- UAV operational characteristics are considered for the computation of trajectories.
- A fast implementation was obtained that allows the calculation of trajectories practically in real time on a modern computer.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- SESAR Joint Undertaking|U-Space. Available online: https://www.sesarju.eu/U-space (accessed on 16 June 2022).
- U-Space Blueprint. Available online: https://www.sesarju.eu/sites/default/files/documents/reports/U-space%20Blueprint%20brochure%20final.PDF (accessed on 22 June 2022).
- EASA Concept of Operations for Drones. Available online: https://www.easa.europa.eu/sites/default/files/dfu/204696_EASA_concept_drone_brochure_web.pdf (accessed on 20 June 2022).
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-Space Concept of Operations: A Key Enabler for Opening Airspace to Emerging Low-Altitude Operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef] [Green Version]
- Bradford, S. Concept of Operations for Urban Air Mobility. Fed. Aviat. Adm. NextGen Off. 2020, 6, 26. Available online: https://nari.arc.nasa.gov/sites/default/files/attachments/UAM_ConOps_v1.0.pdf (accessed on 21 July 2022).
- Bauranov, A.; Rakas, J. Designing Airspace for Urban Air Mobility: A Review of Concepts and Approaches. Prog. Aerosp. Sci. 2021, 125, 100726. [Google Scholar] [CrossRef]
- K-UAM Grand Challenge. Available online: http://en.kuam-gc.kr/ (accessed on 22 June 2022).
- Garrow, L.A.; German, B.J.; Leonard, C.E. Urban Air Mobility: A Comprehensive Review and Comparative Analysis with Autonomous and Electric Ground Transportation for Informing Future Research. Transp. Res. Part C Emerg. Technol. 2021, 132, 103377. [Google Scholar] [CrossRef]
- Dziugiel, B.; Mazur, A.; Stanczyk, A.; Maczka, M.; Liberacki, A.; di Vito, V.; Menichino, A.; Melo, S.; ten Thije, J.; Hesselink, H.; et al. Acceptance, Safety and Sustainability Recommendations for Efficient Deployment of UAM–Outline of H2020 CSA Project. IOP Conf. Ser. Mater. Sci. Eng. 2022, 1226, 012082. [Google Scholar] [CrossRef]
- Pongsakornsathien, N.; Bijjahalli, S.; Gardi, A.; Symons, A.; Xi, Y.; Sabatini, R.; Kistan, T. A Performance-Based Airspace Model for Unmanned Aircraft Systems Traffic Management. Aerospace 2020, 7, 154. [Google Scholar] [CrossRef]
- Semke, W.; Allen, N.; Tabassum, A.; McCrink, M.; Moallemi, M.; Snyder, K.; Arnold, E.; Stott, D.; Wing, M.G. Analysis of Radar and ADS-B Influences on Aircraft Detect and Avoid (DAA) Systems. Aerospace 2017, 4, 49. [Google Scholar] [CrossRef] [Green Version]
- Lippitsch, G. Detect and Avoid Remotely Piloted Aircraft Systems Symposium. 2015. Available online: https://www.icao.int/Meetings/RPAS/RPASSymposiumPresentation/Day%202%20Workshop%205%20Technology%20Gerhard%20Lippitsch%20-%20Detect%20and%20Avoid.pdf (accessed on 21 July 2022).
- Li, Y.; Ibanez-Guzman, J. Lidar for Autonomous Driving: The Principles, Challenges, and Trends for Automotive Lidar and Perception Systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Raj, T.; Hashim, F.H.; Huddin, A.B.; Ibrahim, M.F.; Hussain, A. A Survey on LiDAR Scanning Mechanisms. Electron 2020, 9, 741. [Google Scholar] [CrossRef]
- Royo, S.; Ballesta-Garcia, M. An Overview of Lidar Imaging Systems for Autonomous Vehicles. Appl. Sci. 2019, 9, 4093. [Google Scholar] [CrossRef] [Green Version]
- Möller, T.; Trumbore, B. Fast, Minimum Storage Ray-Triangle Intersection. J. Graph. Tools 1997, 2, 21–28. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Aldao, E.; González-Desantos, L.M.; Michinel, H.; González-Jorge, H. UAV Obstacle Avoidance Algorithm to Navigate in Dynamic Building Environments. Drones 2022, 6, 16. [Google Scholar] [CrossRef]
- Fu, C.; Olivares-Mendez, M.A.; Suarez-Fernandez, R.; Campoy, P. Monocular Visual-Inertial SLAM-Based Collision Avoidance Strategy for Fail-Safe UAV Using Fuzzy Logic Controllers: Comparison of Two Cross-Entropy Optimization Approaches. J. Intell. Robot. Syst. Theory Appl. 2014, 73, 513–533. [Google Scholar] [CrossRef] [Green Version]
- Sathya, A.; Sopasakis, P.; van Parys, R.; Themelis, A.; Pipeleers, G.; Patrinos, P. Embedded Nonlinear Model Predictive Control for Obstacle Avoidance Using PANOC. In Proceedings of the 2018 European Control Conference, Limassol, Cyprus, 12–15 June 2018. [Google Scholar] [CrossRef] [Green Version]
- Lindqvist, B.; Mansouri, S.S.; Agha-Mohammadi, A.A.; Nikolakopoulos, G. Nonlinear MPC for Collision Avoidance and Control of UAVs with Dynamic Obstacles. IEEE Robot. Autom. Lett. 2020, 5, 6001–6008. [Google Scholar] [CrossRef]
- Wächter, A.; Biegler, L.T. On the Implementation of an Interior-Point Filter Line-Search Algorithm for Large-Scale Nonlinear Programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Gill, P.E.; Murray, W.; Saunders, M.A. SNOPT: An SQP Algorithm for Large-Scale Constrained Optimization. Soc. Ind. Appl. Math. 2005, 47, 99–131. [Google Scholar] [CrossRef]
- Byrd, R.H.; Nocedal, J.; Waltz, R.A. Knitro: An Integrated Package for Nonlinear Optimization; Springer: Boston, MA, USA, 2006. [Google Scholar] [CrossRef]
- Guo, J.; Liang, C.; Wang, K.; Sang, B.; Wu, Y. Three-Dimensional Autonomous Obstacle Avoidance Algorithm for UAV Based on Circular Arc Trajectory. Int. J. Aerosp. Eng. 2021, 2021, 8819618. [Google Scholar] [CrossRef]
- Wang, C.; Savkin, A.V.; Garratt, M. A Strategy for Safe 3D Navigation of Non-Holonomic Robots among Moving Obstacles. Robotica 2018, 36, 275–297. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yuan, C.; Ciarletta, L.; Theilliol, D. Collision Avoidance and Path Following Control of Unmanned Aerial Vehicle in Hazardous Environment. J. Intell. Robot. Syst. Theory Appl. 2019, 95, 193–210. [Google Scholar] [CrossRef]
- Aniceto1, S.B.P.; McGrah, R.V.S.; Ochengco, C.J.I.; Regalado, M.G.; Chua, A.Y. A Novel Low-Cost Obstacle Avoidance System for a Quadcopter UAV Using Fuzzy Logic. Int. J. Mech. Eng. Robot. Res. 2020, 9, 733. [Google Scholar] [CrossRef]
- Budiyanto, A.; Cahyadi, A.; Adji, T.B.; Wahyunggoro, O. UAV Obstacle Avoidance Using Potential Field under Dynamic Environment. In Proceedings of the ICCEREC 2015–International Conference on Control, Electronics, Renewable Energy and Communications, Bandung, Indonesia, 27–29 August 2015. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, X.; Nie, Z. A Real-Time Collision Avoidance Strategy in Dynamic Airspace Based on Dynamic Artificial Potential Field Algorithm. IEEE Access 2019, 7, 169469–169479. [Google Scholar] [CrossRef]
- Kownacki, C.; Ambroziak, L. A New Multidimensional Repulsive Potential Field to Avoid Obstacles by Nonholonomic Uavs in Dynamic Environments. Sensors 2021, 21, 7495. [Google Scholar] [CrossRef]
- Lee, H.Y.; Ho, H.W.; Zhou, Y. Deep Learning-Based Monocular Obstacle Avoidance for Unmanned Aerial Vehicle Navigation in Tree Plantations: Faster Region-Based Convolutional Neural Network Approach. J. Intell. Robot. Syst. Theory Appl. 2021, 101, 5. [Google Scholar] [CrossRef]
- Back, S.; Cho, G.; Oh, J.; Tran, X.T.; Oh, H. Autonomous UAV Trail Navigation with Obstacle Avoidance Using Deep Neural Networks. J. Intell. Robot. Syst. Theory Appl. 2020, 100, 1195–1211. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, G.; Liu, L.; Long, T. Obstacle-Avoidance Trajectory Planning for Attitude-Constrained Quadrotors Using Second-Order Cone Programming. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference. [CrossRef]
- Zhong, K.; Jain, P.; Kapoor, A. Fast Second-Order Cone Programming for Safe Mission Planning. In Proceedings of the Proceedings–IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017. [Google Scholar] [CrossRef] [Green Version]
- Szmuk, M.; Pascucci, C.A.; Dueri, D.; Acikmese, B. Convexification and Real-Time on-Board Optimization for Agile Quad-Rotor Maneuvering and Obstacle Avoidance. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; Volume 2017. [Google Scholar] [CrossRef]
- Zhang, G.; Kuang, H.; Liu, X. Fast Trajectory Optimization for Quadrotor Landing on a Moving Platform. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems, Athens, Greece, 1–4 September 2020. [Google Scholar] [CrossRef]
- Shen, Z.; Yu, J.; Dong, X.; Hua, Y.; Ren, Z. Penetration Trajectory Optimization for the Hypersonic Gliding Vehicle Encountering Two Interceptors. Aerosp. Sci. Technol. 2022, 121, 107363. [Google Scholar] [CrossRef]
- Tang, M.; He, Q.; Luo, X.; Liu, L.; Wang, Y.; Cheng, Z. Reentry Trajectory Optimization Based on Second Order Cone Programming. In Proceedings of the 32nd Chinese Control and Decision Conference, Hefei, China, 22–24 August 2020. [Google Scholar] [CrossRef]
- Kwon, H.H.; Choi, H.L. A Convex Programming Approach to Mid-Course Trajectory Optimization for Air-to-Ground Missiles. Int. J. Aeronaut. Space Sci. 2020, 21, 479–492. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, H.; Wang, Z.; Guan, Y. An Optimal Trajectory Design for Lunar Surface Hop. Zhongguo Kongjian Kexue Jishu/Chin. Space Sci. Technol. 2021, 41, 112. [Google Scholar] [CrossRef]
- Szmuk, M.; Eren, U.; Açıkmeşe, B. Successive Convexification for Mars 6-DoF Powered Descent Landing Guidance. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Chen, X.; Cao, R.; Hu, Q. Spacecraft Attitude Control with Saturation and Attitude Forbidden Constraints via Second-Order Cone Programming. Trans. Nanjing Univ. Aeronaut. Astronaut. 2021, 38, 237–248. [Google Scholar] [CrossRef]
- Szmuk, M.; Açıkmeşe, B. Successive Convexification for 6-DoF Mars Rocket Powered Landing with Free-Final-Time. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef] [Green Version]
- Specs–Avia LiDAR Sensor–Livox. Available online: https://www.livoxtech.com/avia/specs (accessed on 22 June 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Specification |
|---|---|
| Detection Range (@100 klx) | 190 m @ 10% reflectivity |
| 230 m @ 20% reflectivity | |
| 320 m @ 80% reflectivity | |
| Field of view | 70.4° (Horizontal) × 77.2° (Vertical) |
| Range Precision (1σ @ 20 m) | 2 cm |
| Point Rate | 240,000 pts/s |
| Weight | 498 g |
| Dimensions | 91 × 61.2 × 64.8 mm |
| Distance (m) | Real Speed (m/s) | ||
|---|---|---|---|
| 10 | −2 | 9.94 ± 0.03 | −2.01 ± 0.02 |
| 10 | −5 | 9.94 ± 0.03 | −5.00 ± 0.05 |
| 10 | −10 | 9.96 ± 0.03 | −9.96 ± 0.05 |
| 30 | −2 | 29.95 ± 0.03 | −2.06 ± 0.13 |
| 30 | −5 | 29.97 ± 0.03 | −5.03 ± 0.14 |
| 30 | −10 | 29.95 ± 0.03 | −10.02 ± 0.12 |
| Study Case | Discretization Steps | Solver | Computation Time (s) |
|---|---|---|---|
| Colinear Obstacle | IPOPT | 0.11 | |
| 50 | SNOPT | 0.07 | |
| KNITRO | 0.04 | ||
| Perpendicular Obstacle | IPOPT | 0.05 | |
| 50 | SNOPT | 0.04 | |
| KNITRO | 0.03 | ||
| Obstacle with acceleration | IPOPT | 0.04 | |
| 50 | SNOPT | 0.03 | |
| KNITRO | 0.03 | ||
| Dynamic Scenario (First maneuver) | IPOPT | 0.08 | |
| 50 | SNOPT | 0.04 | |
| KNITRO | 0.04 | ||
| Dynamic Scenario (Second maneuver) | IPOPT | 0.05 | |
| 39 | SNOPT | 0.03 | |
| KNITRO | 0.03 | ||
| Dynamic Scenario (Third maneuver) | IPOPT | 0.04 | |
| 22 | SNOPT | 0.03 | |
| KNITRO | 0.03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aldao, E.; González-de Santos, L.M.; González-Jorge, H. LiDAR Based Detect and Avoid System for UAV Navigation in UAM Corridors. Drones 2022, 6, 185. https://doi.org/10.3390/drones6080185
Aldao E, González-de Santos LM, González-Jorge H. LiDAR Based Detect and Avoid System for UAV Navigation in UAM Corridors. Drones. 2022; 6(8):185. https://doi.org/10.3390/drones6080185
Chicago/Turabian StyleAldao, Enrique, Luis M. González-de Santos, and Higinio González-Jorge. 2022. "LiDAR Based Detect and Avoid System for UAV Navigation in UAM Corridors" Drones 6, no. 8: 185. https://doi.org/10.3390/drones6080185
APA StyleAldao, E., González-de Santos, L. M., & González-Jorge, H. (2022). LiDAR Based Detect and Avoid System for UAV Navigation in UAM Corridors. Drones, 6(8), 185. https://doi.org/10.3390/drones6080185