
Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
1.1. Scope and Contributions
1.2. Organization of the Paper
2. Related Work
3. Unmanned Aerial Vehicles (UAVs)
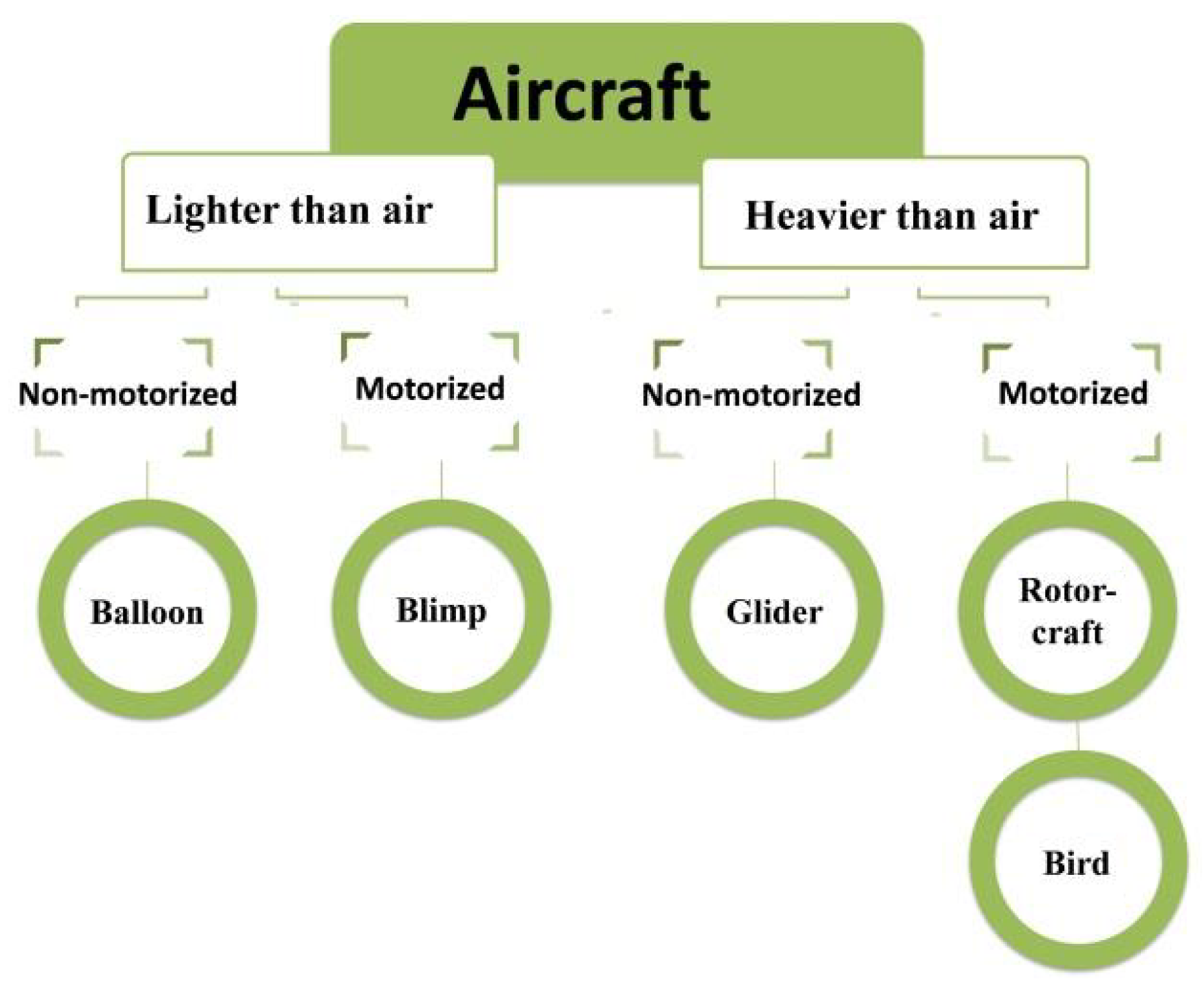
3.1. Classification of UAVs
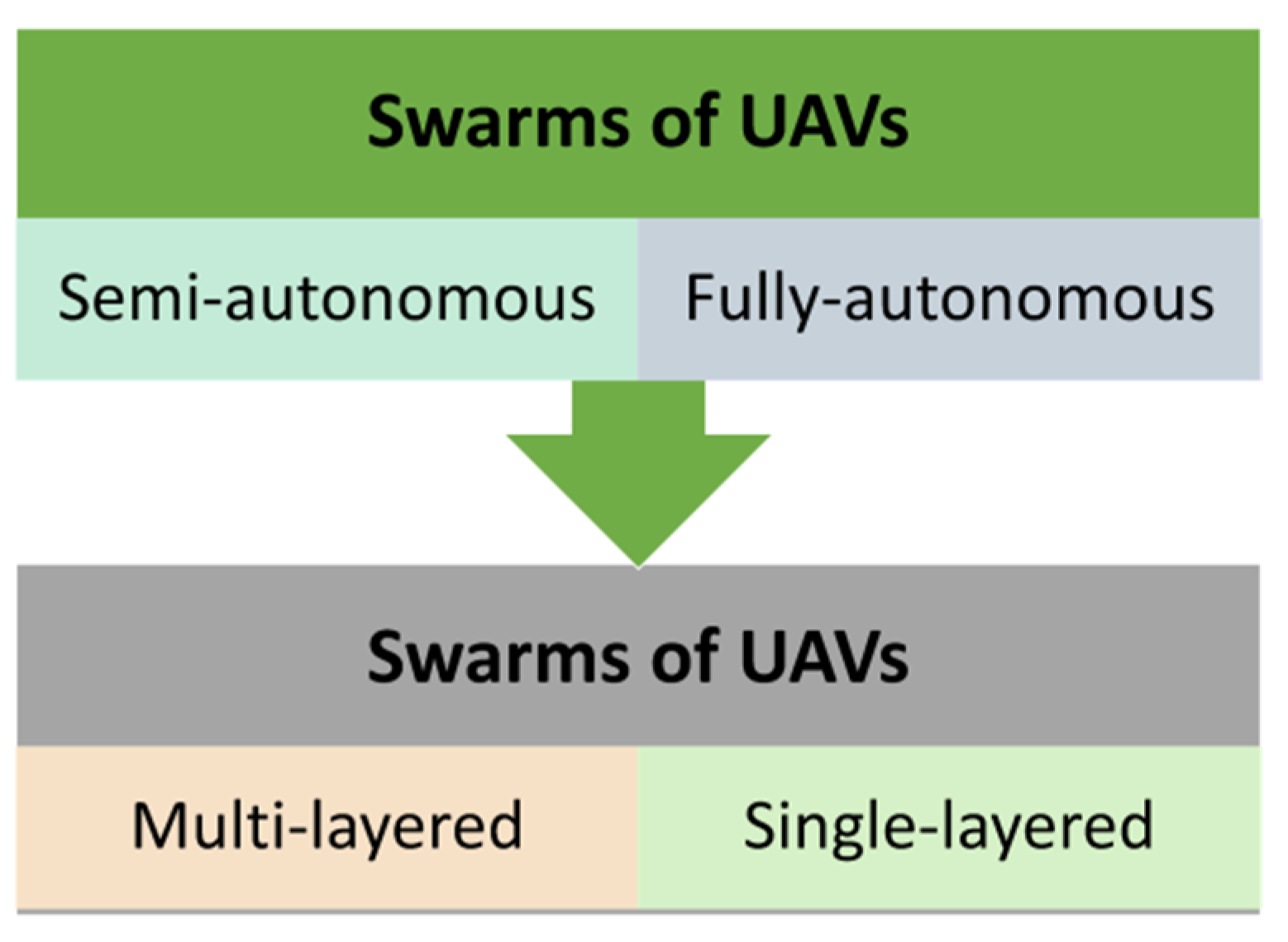
3.2. UAV Swarms
3.3. UAV Characteristics
3.3.1. Speed and Flight Time
3.3.2. Payload
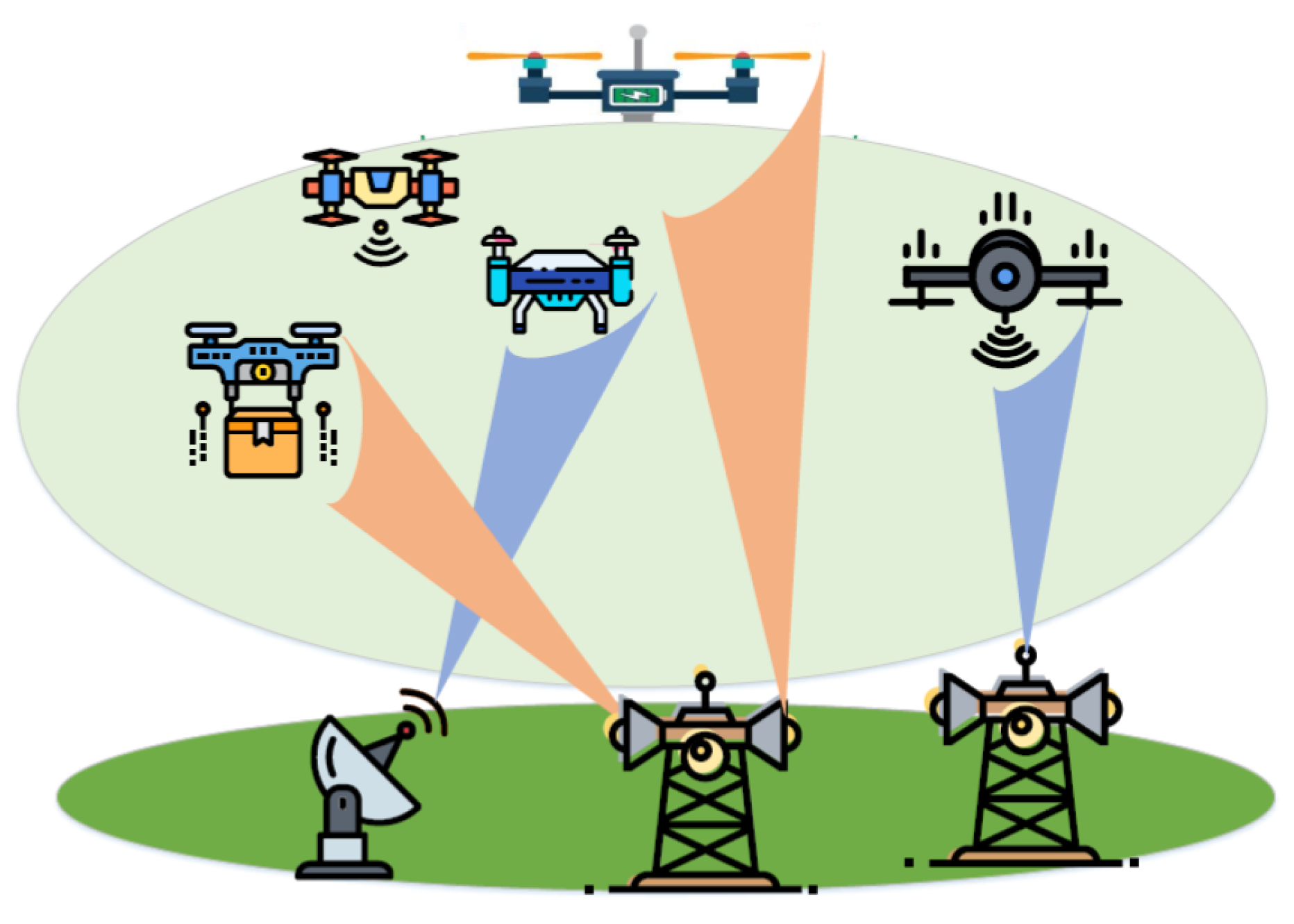
3.3.3. Range and Altitude
- Low altitude platforms (LAPs): LAPs are usually deployed to support cellular communication as they offer fast-deployment and cost-effectiveness. In addition, LAPs offer line-of-sight (LoS) path which can substantially improve the communication performance [54].
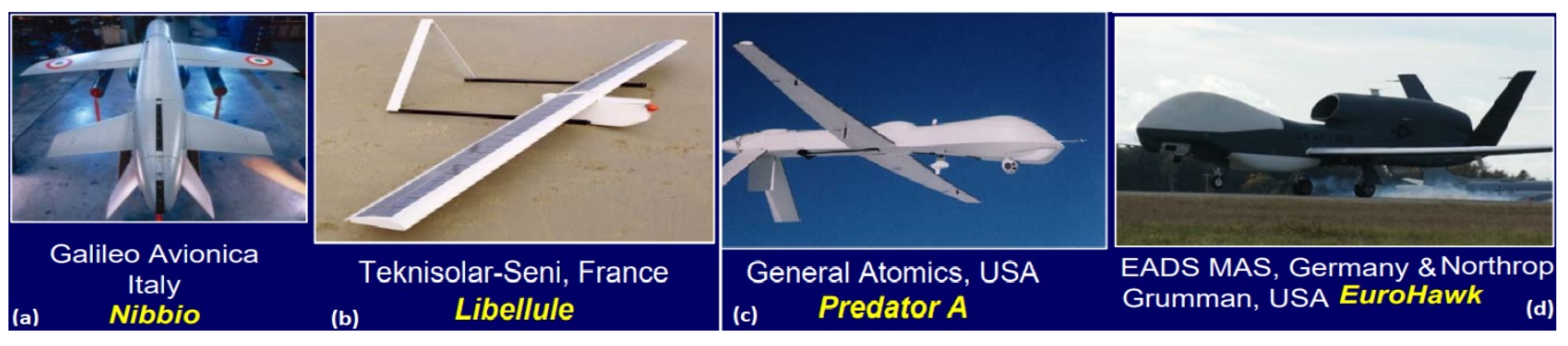
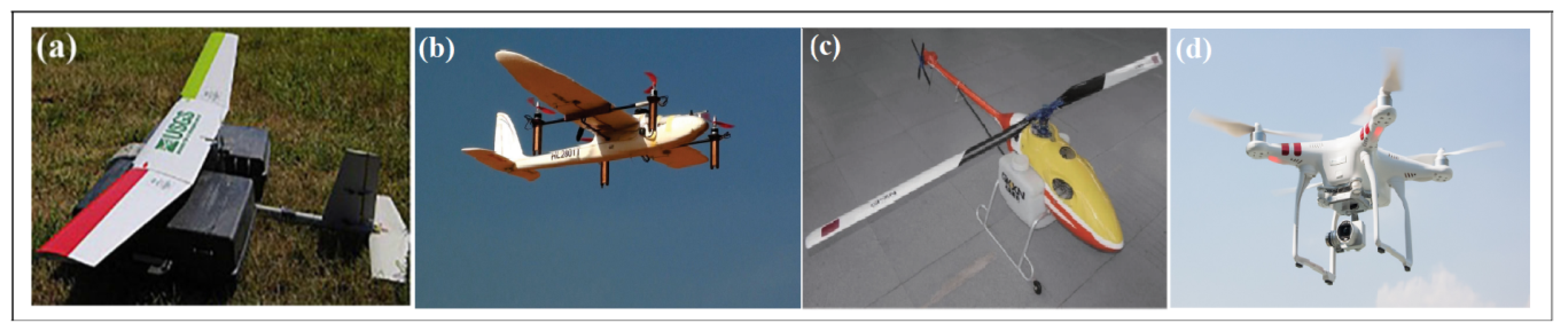
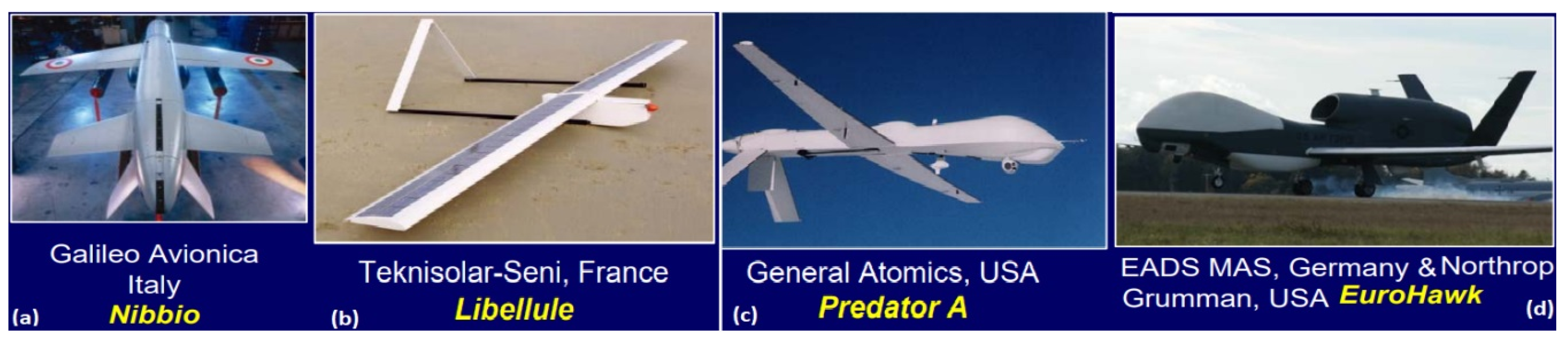
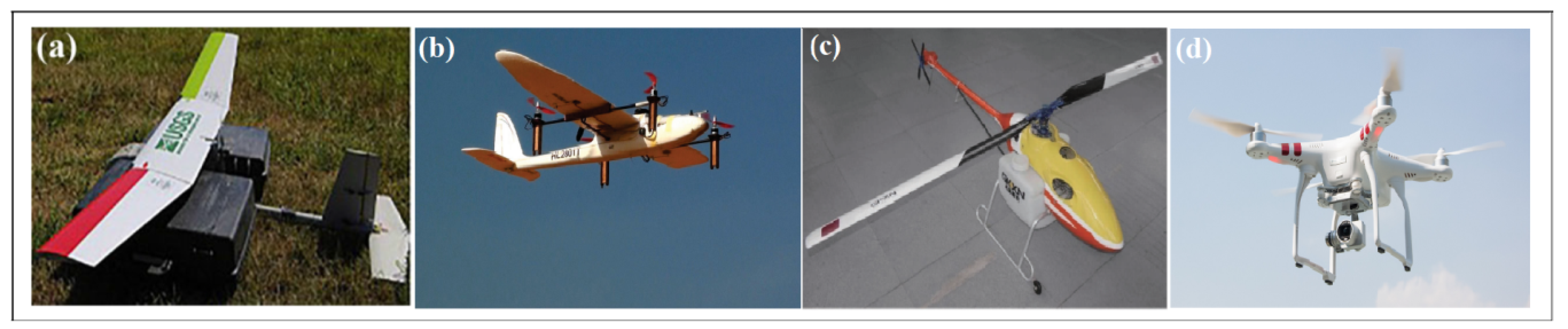
- High altitude platforms (HAPs): HAPs like balloons are also used for cellular connectivity. HAPs offer wide coverage as compared to LAPs. HAPs deployment is complicated and they are mostly considered as a vehicle to support Internet connectivity. Table 4 presents UAV categories based on altitude. Table 5 summarizes a comparison of different UAV types considering three different parameters. Figure 6a–d show different UAV projects implemented in different countries.

| Category | Endurance (h) | Flight alt. (m) | Range (km) | Mass (kg) |
|---|---|---|---|---|
| Low altitude deep penetration (LADP) | 0.5–1 | 50–9000 | >250 | 250–2500 |
| Low altitude long endurance (LALE) | >24 | 3000 | >500 | 15–25 |
| Medium altitude long endurance (MALE) | 24–48 | 3000 | >500 | 1000–1500 |
| High altitude long endurance (HALE) | 24–48 | 20,000 | >2000 | 2500–5000 |
3.4. UAV Standardizations
3.4.1. UAVs 3GPP Standardization
3.4.2. UAVs Standardization Outside the 3GPP
- In 2015, the Institute of Electrical and Electronics Engineers (IEEE) introduced the Drones Working Group (DWG). The main aim of this group was to develop the taxonomy for consumer drones with the objective of highlighting security and privacy issues. For this purpose, the DWG establishes methods, systems, requirements, testing, and validation needed for consumer drones to preserve the security and privacy of the public and their properties.
- The European Telecommunications Standards Institute (ETSI) aims to identify UAV applications, use cases, and understanding regarding Internet Protocol (IP) suite architecture to be developed and spectrum rules required to facilitate UAVs in current LTE networks [63].
- The International Telecommunication Union Telecommunication Standardization Sector (ITU-T) defined work item (WI) Y.UAV.arch to support a reliable and functional architecture of UAVs and UAV controllers through IMT-2020 networks [64].
3.5. Unmanned Traffic Management (UTM)
- Safe and secure UAV missions,
- Flexible operations for several types of UAVs,
- Provides real-time monitoring based on integrated sensors,
- High level control providing prediction of other piloted UAVs,
- A key unifying element of reliance on a more automated and competitive system.
- Operates on national and international standardizations.
4. UAV Battery Charging
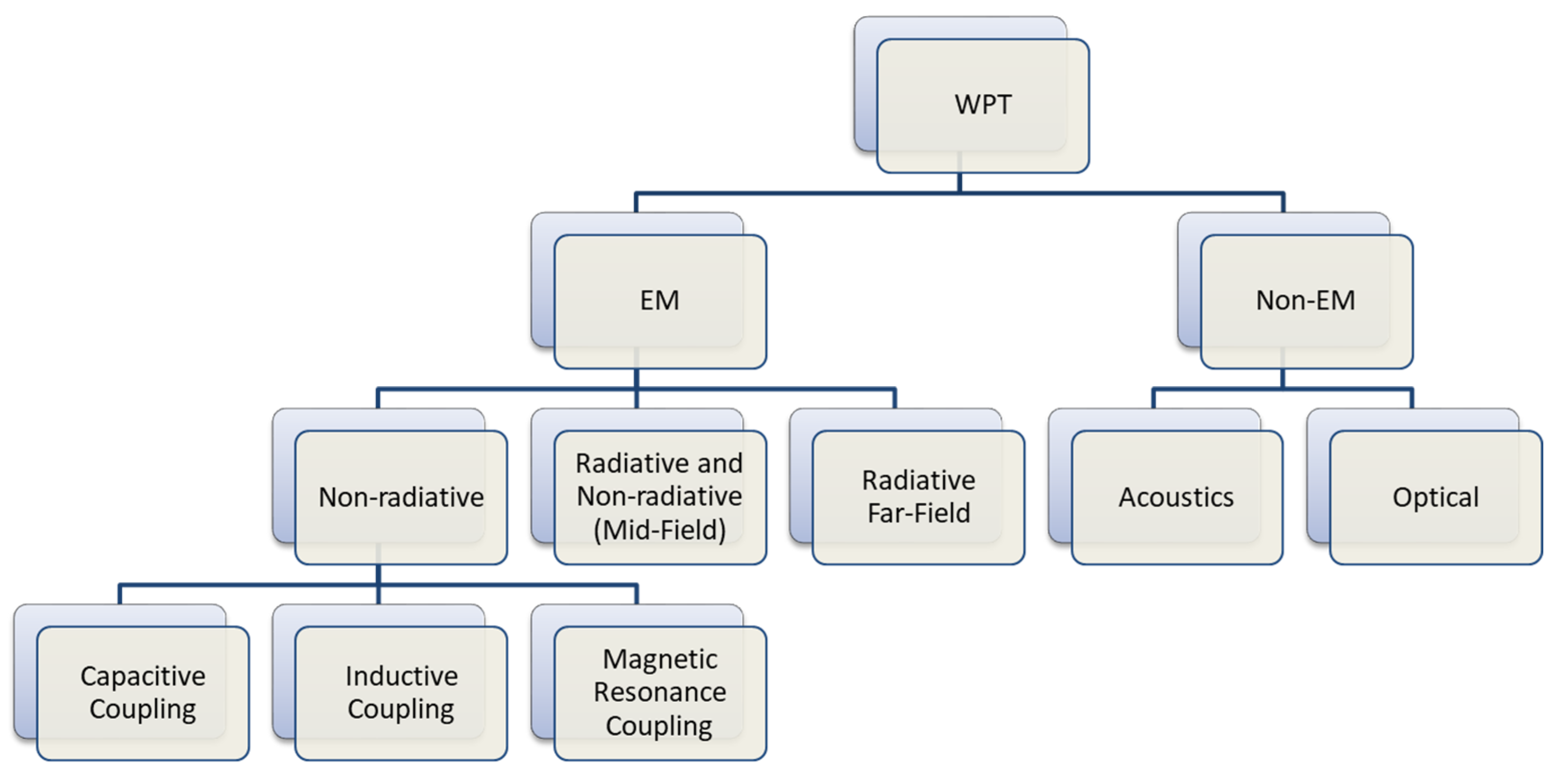
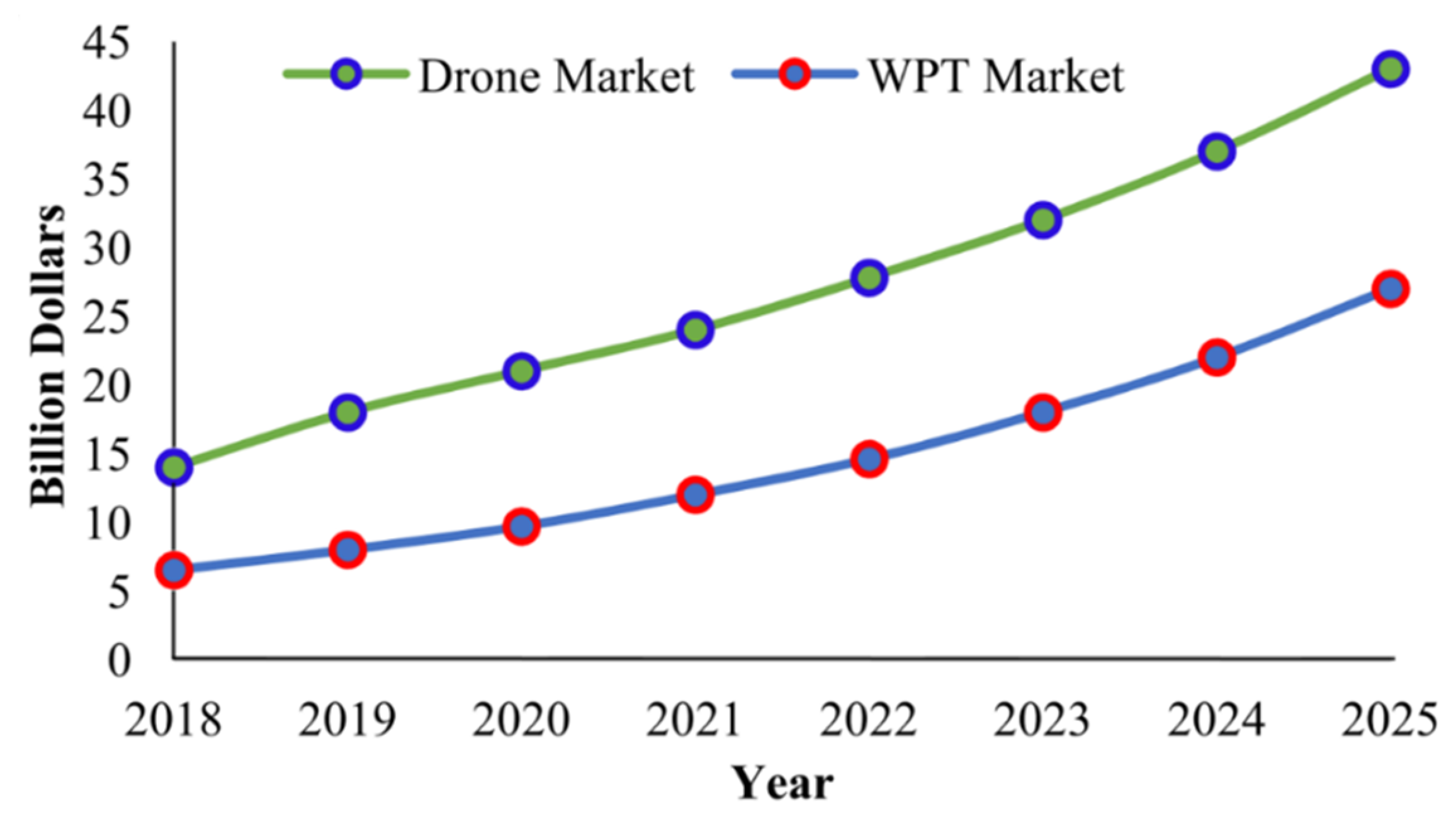
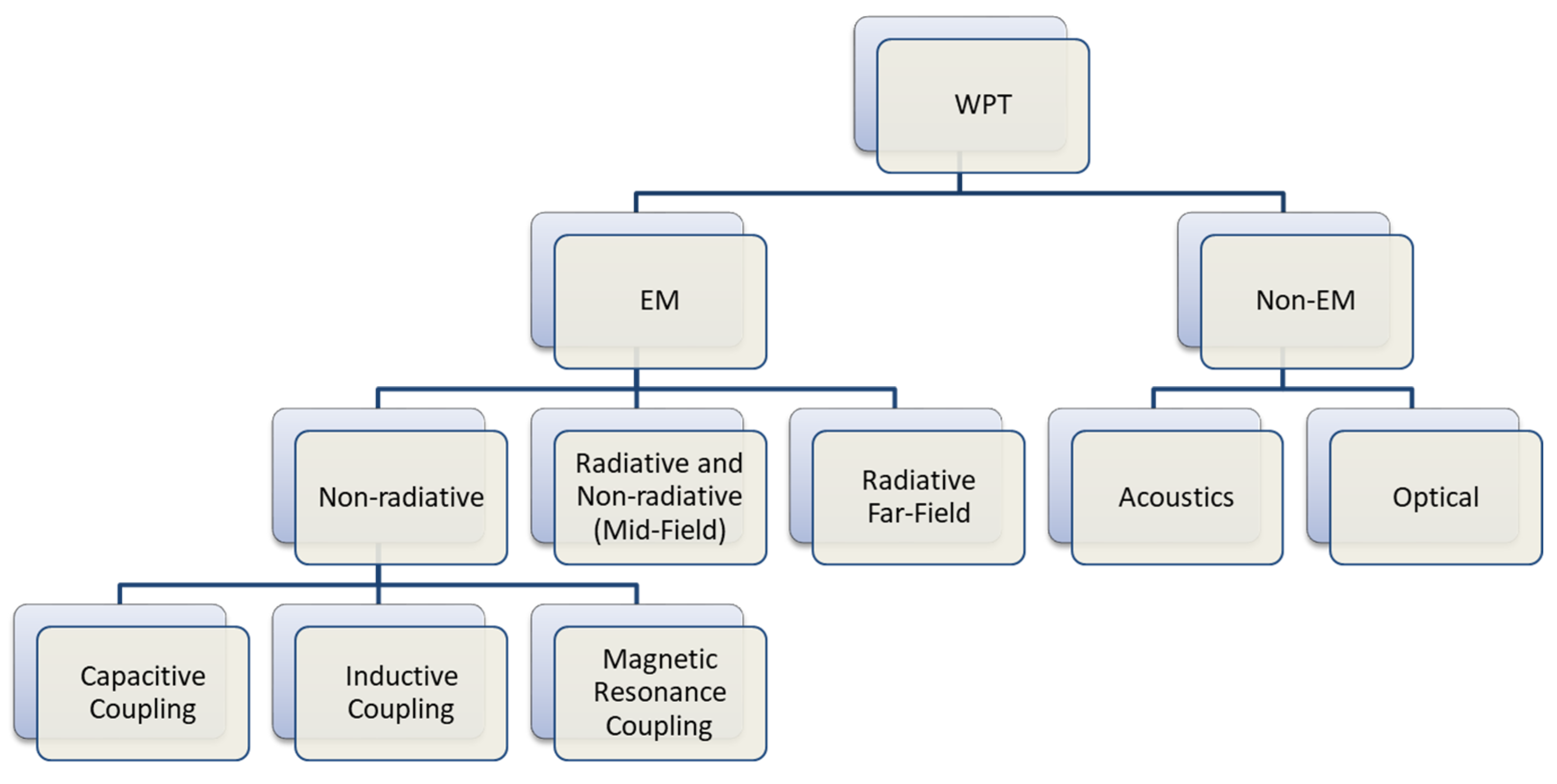
4.1. Wireless Power Tranfer (WPT)
4.1.1. Photovoltaic Cell-Based UAV Charging
4.1.2. Charging with Laser Beaming
5. UAVs in 5G and IoT Networks
6. UAV Applications Areas
6.1. Security, Monitoring, and Surveillance
6.2. Disaster Management
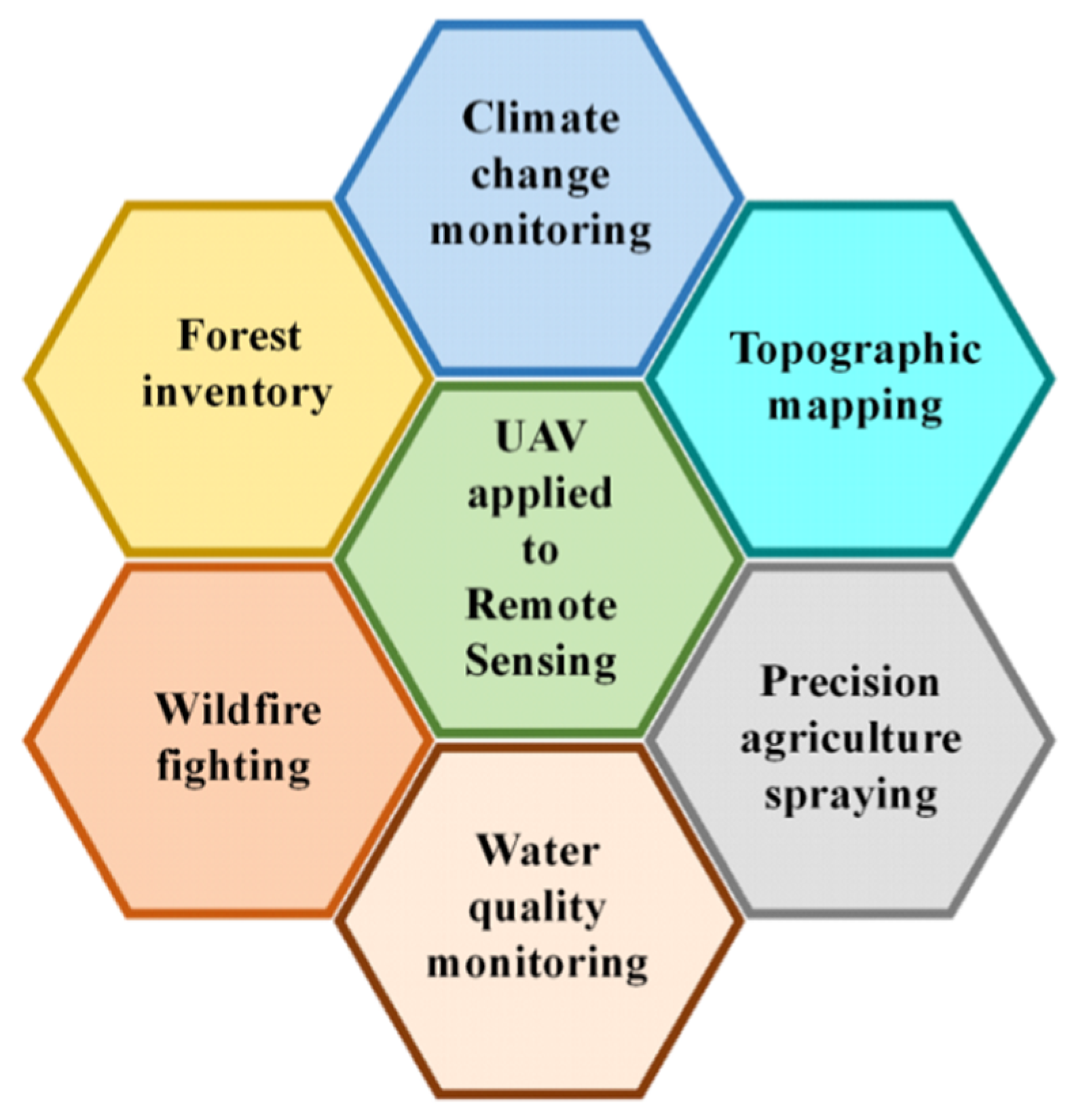
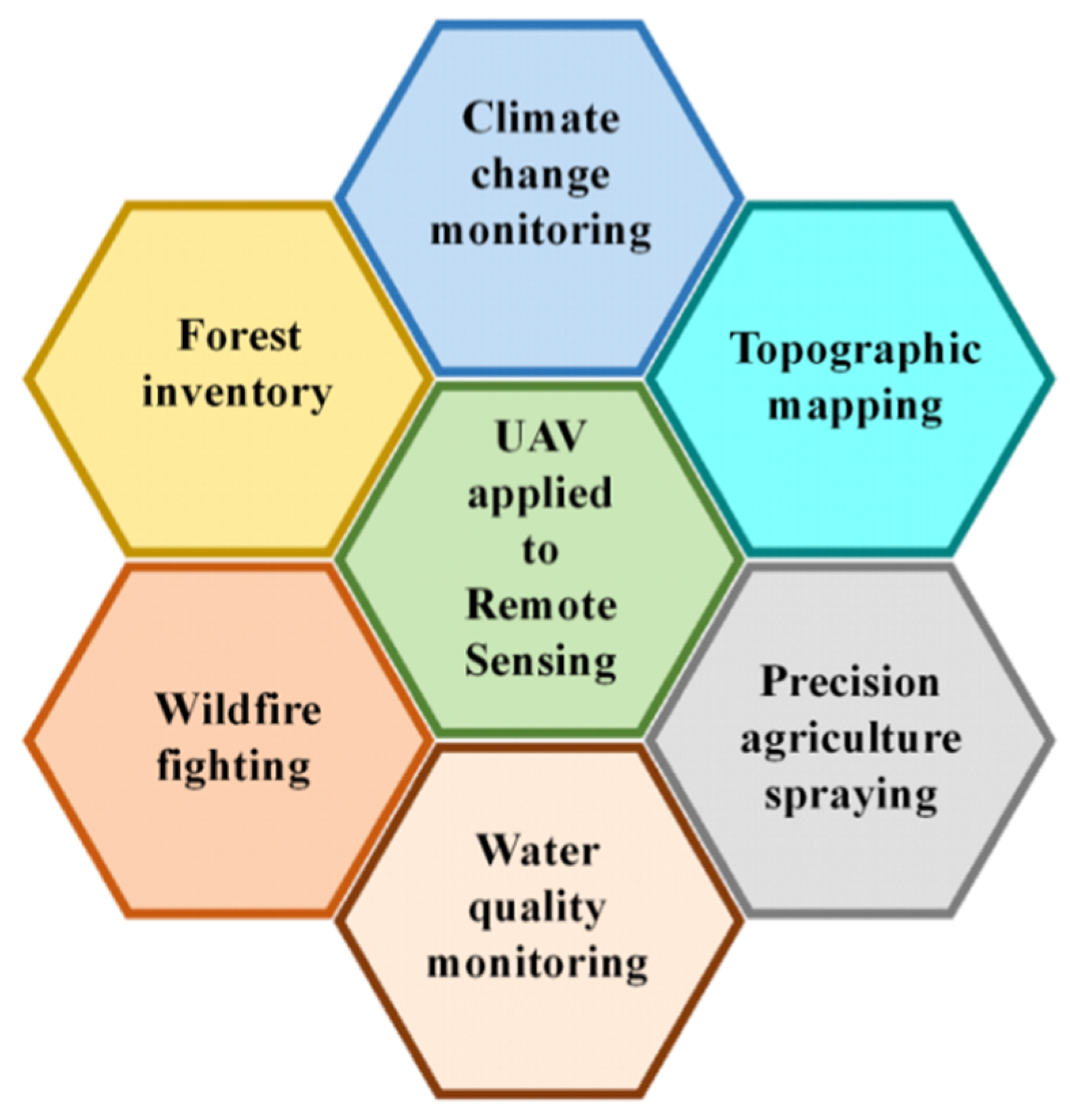
6.3. Remote Sensing
6.4. Search and Rescue (SAR)
6.5. Construction and Infrastructure Inspection
6.6. Precision Agriculture
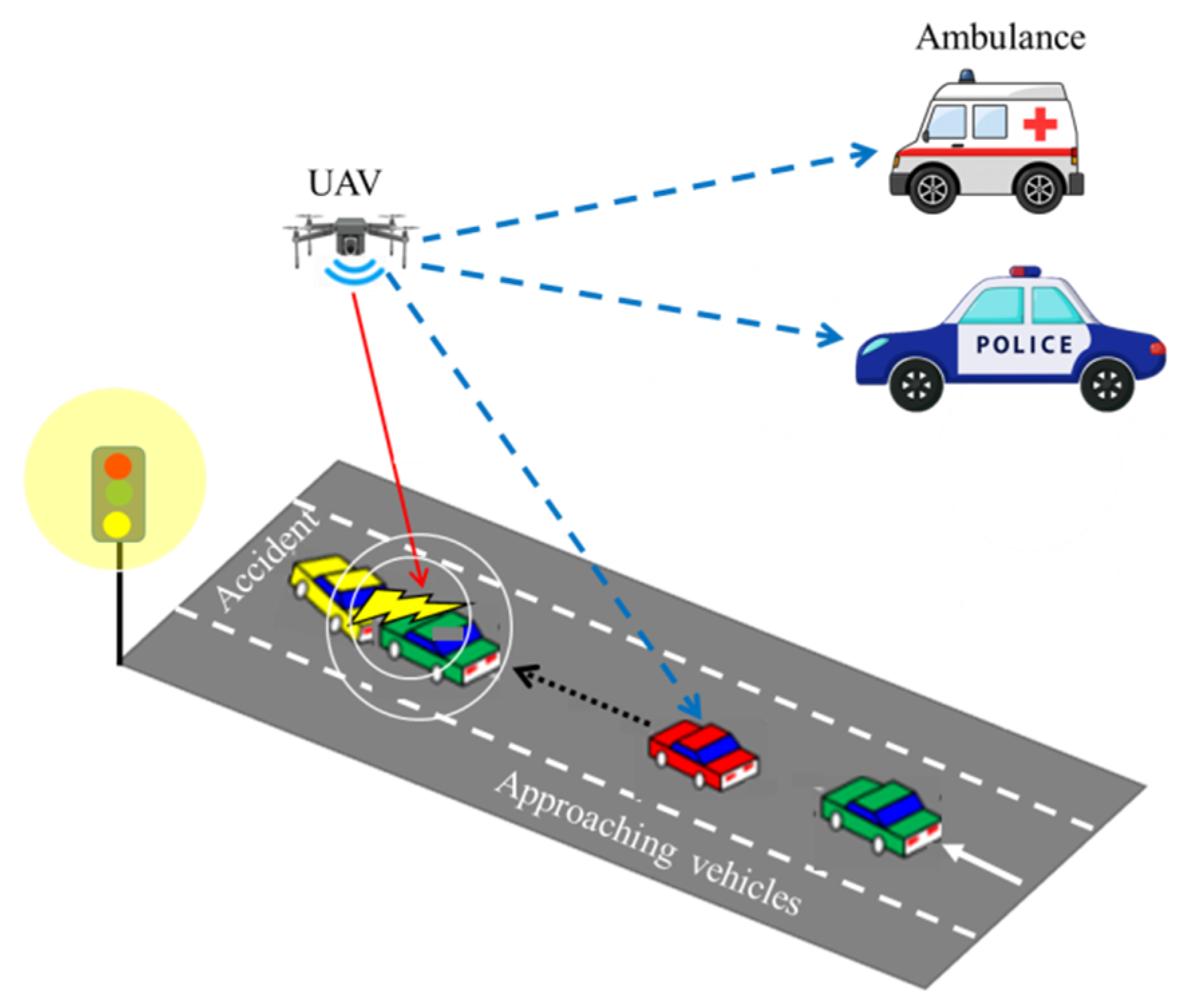
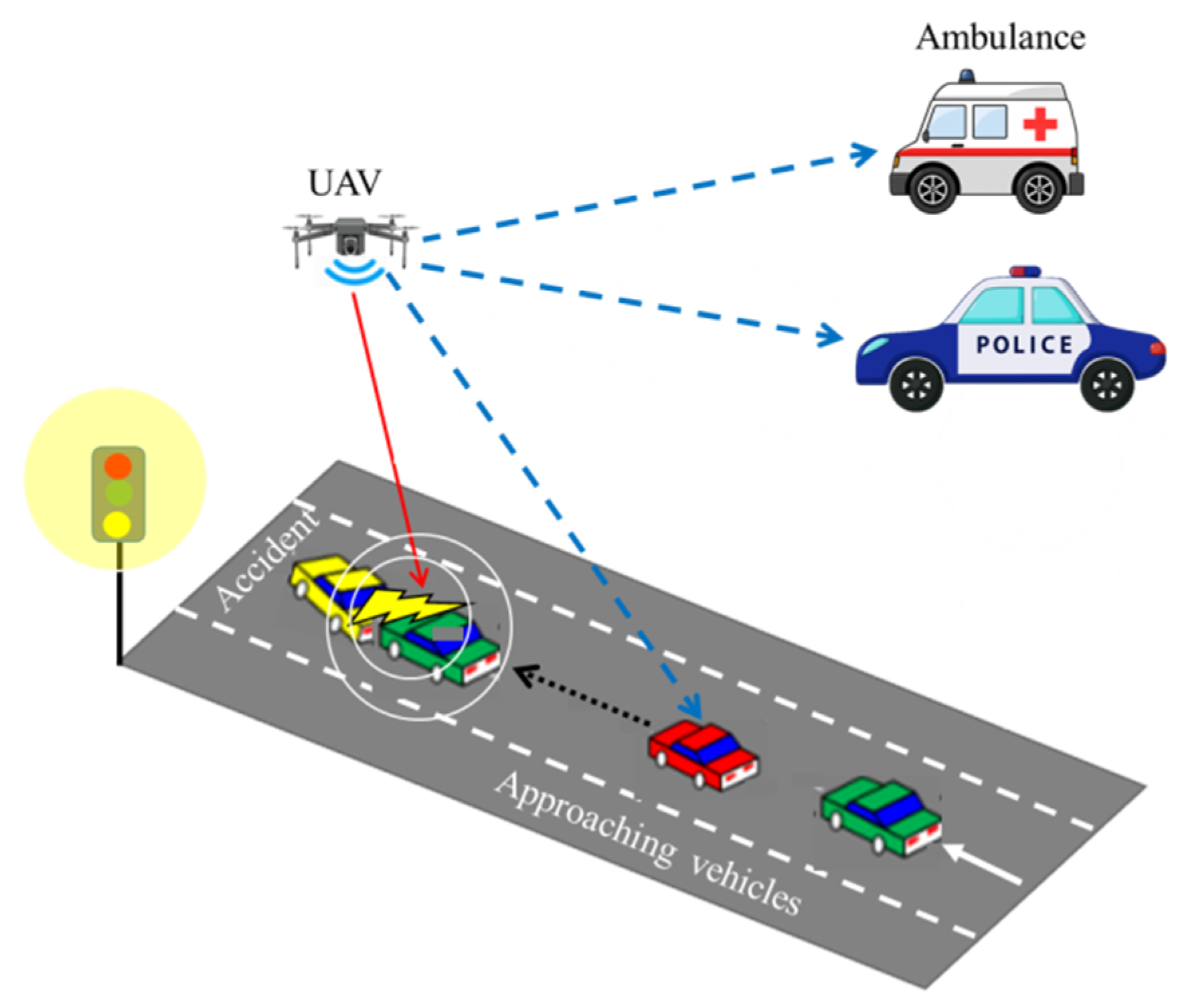
6.7. Real-Time Monitoring of Road Traffic
6.8. UAVs for Automated Forest Restoration
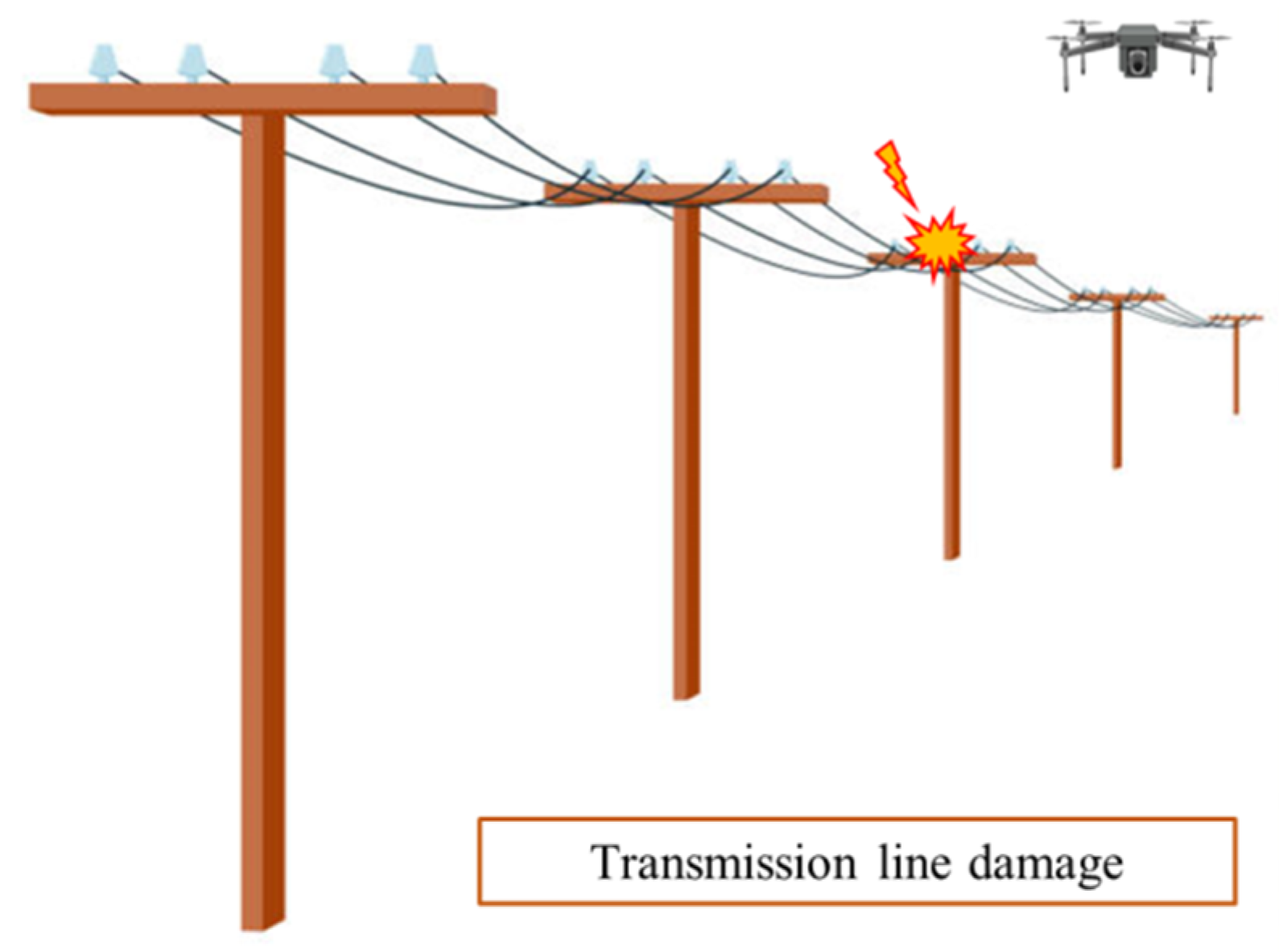
6.9. UAVs for Inspection of Overhead Power Lines
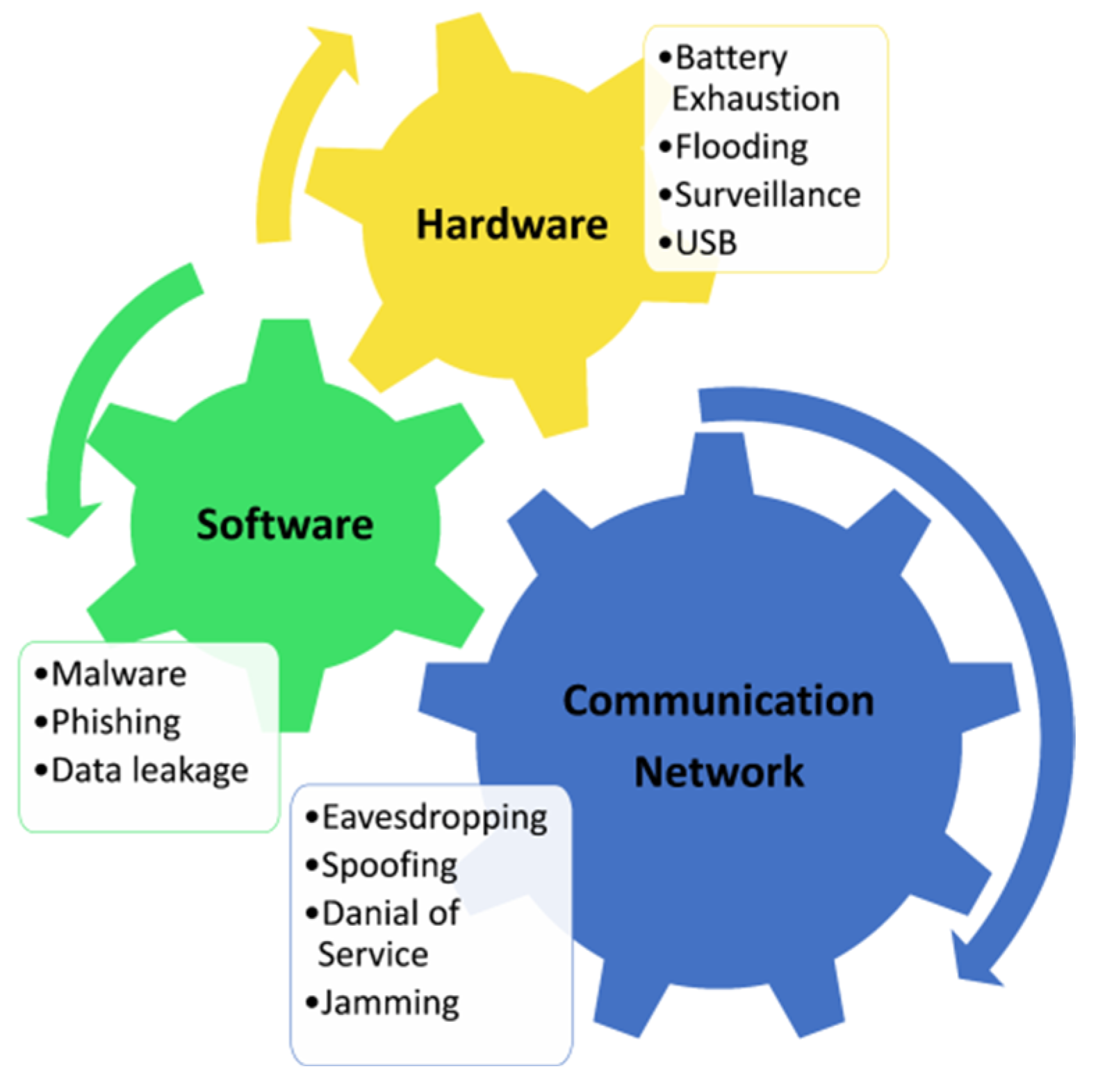
7. Security Challenges and Solutions
8. Future Research Directions
8.1. Machine Learning and Deep Learning Techniques
8.2. Energy Harvesting Techniques
8.3. Sensing, Navigation and Localization Algorithms
8.4. Offloading Algorithms
8.5. Mobility Models
8.6. Aerial Blockchain
8.7. Novel Antenna Designs Techniques
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hassija, V.; Saxena, V.; Chamola, V. Scheduling drone charging for multi-drone network based on consensus time-stamp and game theory. Comput. Commun. 2019, 149, 51–61. [Google Scholar] [CrossRef]
- Yoo, W.; Yu, E.; Jung, J. Drone delivery: Factors affecting the public’s attitude and intention to adopt. Telemat. Inform. 2018, 35, 1687–1700. [Google Scholar] [CrossRef]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Jeong, J.; Kim, H.; Park, J.-S.; Kim, T. CBDN: Cloud-Based Drone Navigation for Efficient Battery Charging in Drone Networks. IEEE Trans. Intell. Transp. Syst. 2018, 20, 4174–4191. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Cellular UAV-to-X Communications: Design and Optimization for Multi-UAV Networks. IEEE Trans. Wirel. Commun. 2019, 18, 1346–1359. [Google Scholar] [CrossRef] [Green Version]
- Amazon Prime AIR. Available online: https://www.amazon.com/Amazon-Prime-Air/b?ie=UTF8&node=8037720011 (accessed on 1 March 2022).
- Deutshe Post DHL Group. Available online: www.dpdhl.com (accessed on 5 March 2022).
- Wired Shopper. Available online: https://thewiredshopper.com (accessed on 10 March 2022).
- USA Today. Available online: www.usatoday.com (accessed on 14 March 2022).
- EHang AAV. Available online: https://www.ehang.com/ehangaav (accessed on 20 March 2022).
- Khan, M.A.; Alvi, B.A.; Safi, A.; Khan, I.U. Drones for Good in Smart Cities: A Review. In Proceedings of the International Conference on Electrical, Electronics, Computers, Communication, Mechanical and Computing (EECCMC), Tamil Nadu, India, 28–29 January 2018. [Google Scholar]
- Shakoor, S.; Kaleem, Z.; Baig, M.I.; Chughtai, O.; Duong, T.Q.; Nguyen, L.D. Role of UAVs in Public Safety Communications: Energy Efficiency Perspective. IEEE Access 2019, 7, 140665–140679. [Google Scholar] [CrossRef]
- Noor, F.; Khan, M.; Al-Zahrani, A.; Ullah, I.; Al-Dhlan, K. A Review on Communications Perspective of Flying Ad-Hoc Networks: Key Enabling Wireless Technologies, Applications, Challenges and Open Research Topics. Drones 2020, 4, 65. [Google Scholar] [CrossRef]
- Zhang, S.; Qian, Z.; Wu, J.; Kong, F.; Lu, S. Optimizing Itinerary Selection and Charging Association for Mobile Chargers. IEEE Trans. Mob. Comput. 2016, 16, 2833–2846. [Google Scholar] [CrossRef]
- Aldhaher, S.; Mitcheson, P.D.; Arteaga, J.M.; Kkelis, G.; Yates, D.C. Light-weight wireless power transfer for mid-air charging of drones. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 336–340. [Google Scholar]
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless Charging Techniques for UAVs: A Review, Reconceptualization, and Extension. IEEE Access 2018, 6, 29865–29884. [Google Scholar] [CrossRef]
- Raciti, A.; Rizzo, S.A.; Susinni, G. Drone charging stations over the buildings based on a wireless power transfer system. In Proceedings of the 2018 IEEE/IAS 54th Industrial and Commercial Power Systems Technical Conference (I & CPS), Niagara Falls, ON, Canada, 7–10 May 2018; pp. 1–6. [Google Scholar]
- Rohan, A.; Rabah, M.; Talha, M.; Kim, S.-H. Development of Intelligent Drone Battery Charging System Based on Wireless Power Transmission Using Hill Climbing Algorithm. Appl. Syst. Innov. 2018, 1, 44. [Google Scholar] [CrossRef] [Green Version]
- Shin, M.; Kim, J.; Levorato, M. Auction-Based Charging Scheduling With Deep Learning Framework for Multi-Drone Networks. IEEE Trans. Veh. Technol. 2019, 68, 4235–4248. [Google Scholar] [CrossRef] [Green Version]
- Pham, H.; Smolka, S.A.; Stoller, S.D.; Phan, D.; Yang, J. A survey on unmanned aerial vehicle collision avoidance systems. arXiv 2015, arXiv:1508.07723. [Google Scholar]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A commu-nications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Ebeid, E.; Skriver, M.; Jin, J. A survey on open-source flight control platforms of unmanned aerial vehicle. In Proceedings of the 2017 Euromicro Conference on Digital System Design (DSD), Vienna, Austria, 30 August–1 September 2017; pp. 396–402. [Google Scholar] [CrossRef] [Green Version]
- Geraci, G.; Garcia-Rodriguez, A.; Giordano, L.G.; Lopez-Perez, D.; Bjornson, E. Understanding UAV Cellular Communications: From Existing Networks to Massive MIMO. IEEE Access 2018, 6, 67853–67865. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.-H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. arXiv 2018, arXiv:1803.00680. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Fei, Z.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Zhao, H.; Hou, S.; Zhao, Z.; Xu, H.; Wu, X.; Wu, Q.; Zhang, R. A Survey on 5G Millimeter Wave Communications for UAV-Assisted Wireless Networks. IEEE Access 2019, 7, 117460–117504. [Google Scholar] [CrossRef]
- Ullah, Z.; Al-Turjman, F.; Mostarda, L. Cognition in UAV-Aided 5G and Beyond Communications: A Survey. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 872–891. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Ahanger, T.A.; Ibrahim, A. Softwarization of UAV networks: A survey of ap-plications and future trends. IEEE Access 2020, 8, 98073–98125. [Google Scholar] [CrossRef]
- Zhi, Y.; Fu, Z.; Sun, X.; Yu, J. Security and Privacy Issues of UAV: A Survey. Mob. Netw. Appl. 2019, 25, 95–101. [Google Scholar] [CrossRef]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV systems: A survey. Unmanned Syst. 2002, 8, 149–169. [Google Scholar] [CrossRef]
- Jiang, X.; Sheng, M.; Zhao, N.; Xing, C.; Lu, W.; Wang, X. Green UAV communications for 6G: A survey. Chin. J. Aeronaut. 2021, in press. [CrossRef]
- Song, Q.; Zeng, Y.; Xu, J.; Jin, S. A survey of prototype and experiment for UAV communications. Sci. China Inf. Sci. 2021, 64, 140301. [Google Scholar] [CrossRef]
- Srivastava, S.; Narayan, S.; Mittal, S. A survey of deep learning techniques for vehicle detection from UAV images. J. Syst. Archit. 2021, 117, 102152. [Google Scholar] [CrossRef]
- Nourmohammadi, A.; Jafari, M.; Zander, T.O. A Survey on Unmanned Aerial Vehicle Remote Control Using Brain–Computer Interface. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 337–348. [Google Scholar] [CrossRef]
- Kanellakis, C.; Nikolakopoulos, G. Survey on Computer Vision for UAVs: Current Developments and Trends. J. Intell. Robot. Syst. 2017, 87, 141–168. [Google Scholar] [CrossRef] [Green Version]
- Unmanned Airspace. Available online: https://www.polarismarketresearch.com/industry-analysis/commercial-uav-market/request-for-sample (accessed on 25 March 2022).
- Ucgun, H.; Yuzgec, U.; Bayilmis, C. A review on applications of rotary-wing unmanned aerial vehicle charging stations. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211015863. [Google Scholar] [CrossRef]
- Gautam, A.; Sujit, P.B.; Saripalli, S. A survey of autonomous landing techniques for UAVs. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 1210–1218. [Google Scholar]
- Zhao, X.; Zhou, Z.; Zhu, X. Design of a lift-propulsion VTOL UAV system. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 1908–1913. [Google Scholar]
- Zhang, Q.; Liu, H.H. Robust cooperative formation control of fixed-wing unmanned aerial vehicles. arXiv 2019, arXiv:1905.01028. [Google Scholar]
- Cai, G.; Lum, K.-Y.; Chen, B.M.; Lee, T.H. A brief overview on miniature fixed-wing unmanned aerial vehicles. In Proceedings of the IEEE ICCA 2010, Xiamen, China, 9–11 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 285–290. [Google Scholar] [CrossRef]
- Dong, F.; Li, L.; Lu, Z.; Pan, Q.; Zheng, W. Energy-efficiency for fixed-wing UAV-enabled data collection and forwarding. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Different Types of Drones. Available online: https://dronepedia.xyz/5-different-types-of-drones/ (accessed on 1 April 2022).
- Tahir, A.; Böling, J.; Haghbayan, M.H.; Toivonen, H.T.; PLoSila, J. Swarms of unmanned aerial vehicles—A survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Mairaj, A.; Baba, A.I.; Javaid, A.Y. Application specific drone simulators: Recent advances and challenges. Simul. Model. Pract. Theory 2019, 94, 100–117. [Google Scholar] [CrossRef] [Green Version]
- Gunarathna, J.K.; Munasinghe, R. Development of a quad-rotor fixed-wing hybrid unmanned aerial vehicle. In Proceedings of the 2018 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 30 May–1 June 2018; pp. 72–77. [Google Scholar] [CrossRef]
- Wen, S.; Han, J.; Lan, Y.; Yin, X.; Lu, Y. Influence of wing tip vortex on drift of single rotor plant protection unmanned aerial vehicle. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2018, 49, 127–137. [Google Scholar]
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124. [Google Scholar]
- De Souza BJ, O.; Endler, M. Coordinating movement within swarms of UAVs through mobile networks. In Proceedings of the 2015 IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops), St. Louis, MO, USA, 23–27 March 2015; pp. 154–159. [Google Scholar]
- Pestana, J.; Sanchez-Lopez, J.L.; de la Puente, P.; Carrio, A.; Campoy, P. A Vision-based Quadrotor Swarm for the participation in the 2013 International Micro Air Vehicle Competition. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 617–622. [Google Scholar] [CrossRef] [Green Version]
- Fotouhi, A.; Ding, M.; Hassan, M. Understanding autonomous drone maneuverability for Internet of Things applications. In Proceedings of the 2017 IEEE 18th International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Macau, China, 12–15 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Gomez, K. Modeling cellular-to-UAV path-loss for suburban environments. IEEE Wirel. Commun. Lett. 2017, 7, 82–85. [Google Scholar] [CrossRef]
- Ding, M.; Wang, P.; Lopez-Perez, D.; Mao, G.; Lin, Z. Performance impact of LoS and NLoS transmissions in dense cellular networks. IEEE Trans. Wirel. Commun. 2015, 15, 2365–2380. [Google Scholar] [CrossRef] [Green Version]
- Hempe, D. Unmanned aircraft systems in the United States. In Proceedings of the US/Europe International Safety Conference, Washington, DC, USA, 6–8 June 2006. [Google Scholar]
- EASA UAS Workshop. Available online: https://www.easa.europa.eu/sites/default/files/dfu/ws_prod-g-doc-Events-2008-February-1-Overview-of-the-UAV-Industry-(UVS).pdf (accessed on 5 April 2022).
- Yinka-Banjo, C.; Ajayi, O. Sky-Farmers: Applications of unmanned aerial vehicles (UAV) in agriculture. Auton. Veh. 2020, 107–128. [Google Scholar] [CrossRef] [Green Version]
- DJI. DJI Agras MG-1P Series. Available online: https://www.dji.com/mg-1p/info#specs (accessed on 10 April 2022).
- AgEagle Aeriel Systems Inc. AgEagle RX-60 Taking Agriculture Intelligence to the Next Level. Available online: https://docs.wixstatic.com/ugd/89e3c5_e3de865b41b644fbb68adea13706723c.pdf?index=true (accessed on 15 April 2022).
- AlphaUnmmanedSystems. Alpha 800 UAV Helicopter. Available online: https://alphasecurityanddefense.com/alpha-800/ (accessed on 18 April 2022).
- ArcturusUAV. Jump. Available online: https://www.avinc.com/uas/jump-20 (accessed on 20 April 2022).
- 3GPP Standard TS 36.777; Technical Specification Group Radio Access Network; Study on Enhanced LTE Support for Aerial Vehicles (Release 15). 3GPP Mobile Competence Centre: Sophia Antipolis, France, 2017.
- European Telecommunications Standards Institute. Use Cases and Spectrum Considerations for UAS (Unmanned Aircraft Systems); Technical Report 103 373; ETSI: Sophia Antipolis, France, 2018; Available online: https://docbox.etsi.org/ERM/ERMJTFEA/70-Drafts/JTFEA32/ERM-TGAERO-32v003.docx (accessed on 20 April 2022).
- Telecommunication Standardization Sector of ITU (International Telecommunication Union). Functional Architecture for Unmanned Aerial Vehicles and Unmanned Aerial Vehicle Controllers Using IMT-2020 Networks; ITU-T: Geneva, Switzerland, 2017; Available online: https://www.itu.int/rec/T-REC-Y.4421-202110-I/en (accessed on 20 April 2022).
- Decker, C.; Chiambaretto, P. Economic policy choices and trade-offs for Unmanned aircraft systems Traffic Management (UTM): Insights from Europe and the United States. Transp. Res. Part A Policy Pract. 2022, 157, 40–58. [Google Scholar] [CrossRef]
- Shrestha, R.; Bajracharya, R.; Kim, S. 6G enabled unmanned aerial vehicle traffic management: A perspective. IEEE Access 2021, 9, 91119–91136. [Google Scholar] [CrossRef]
- Jawad, A.M.; Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Abdullah, N.F.; Abu-Alshaeer, M.J. Wireless power transfer with magnetic resonator coupling and sleep/active strategy for a drone charging station in smart agriculture. IEEE Access 2019, 7, 139839–139851. [Google Scholar] [CrossRef]
- Valente, J.; Sanz, D.; Barrientos, A.; Del Cerro, J.; Ribeiro, Á.; Rossi, C. An air-ground wireless sensor network for crop monitoring. Sensors 2011, 11, 6088–6108. [Google Scholar] [CrossRef] [Green Version]
- Lee, B.; Kwon, S.; Park, P.; Kim, K. Active power management system for an unmanned aerial vehicle powered by solar cells, a fuel cell, and batteries. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 3167–3177. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Feliziani, M. Wireless Power Transfer Technology Applied to an Autonomous Electric UAV with a Small Secondary Coil. Energies 2018, 11, 352. [Google Scholar] [CrossRef] [Green Version]
- Wireless Power Transmission: Patent Landscape Analysis. Available online: https://www.wipo.int/edocs/plrdocs/en/lexinnova_plr_wireless_power.pdf (accessed on 23 April 2022).
- Unmanned Airspace. Available online: https://www.unmannedairspace.info/latest-news-and-information/commercial-uav-market-to-reach-usd15-62-billion-by-2026-polaris-market-research/ (accessed on 5 May 2022).
- Xu, J.; Zeng, Y.; Zhang, R. UAV-enabled wireless power transfer: Trajectory design and energy optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Yuan, X.; Xu, J.; Schmeink, A. Optimal 1D trajectory design for uav-enabled multiuser wireless power transfer. IEEE Trans. Commun. 2019, 67, 5674–5688. [Google Scholar] [CrossRef] [Green Version]
- Campi, T.; Dionisi, F.; Cruciani, S.; De Santis, V.; Feliziani, M.; Maradei, F. Magnetic field levels in drones equipped with wireless power transfer technology. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Com-patibility (APEMC), Shenzhen, China, 18–21 May 2016; Volume 1, pp. 544–547. [Google Scholar]
- Bin Junaid, A.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N.; Seneviratne, L. Autonomous wireless self-charging for multi-rotor unmanned aerial vehicles. Energies 2017, 10, 803. [Google Scholar] [CrossRef]
- Blain, L. In-Flight Charging Gives Drones Unlimited Autonomous Range. Available online: https://newatlas.com/in-airdrone-charging-unlimited-range/56363 (accessed on 25 April 2022).
- Rosa, R.V.; Rothenberg, C.E. Blockchain-Based Decentralized Applications for Multiple Administrative Domain Networking. IEEE Commun. Stand. Mag. 2018, 2, 29–37. [Google Scholar] [CrossRef]
- Alladi, T.; Chamola, V.; Sikdar, B.; Choo, K.-K.R. Consumer IoT: Security vulnerability case studies and solu-tions. IEEE Consum. Electron. Mag. 2020, 9, 17–25. [Google Scholar] [CrossRef]
- Song, C.; Kim, H.; Kim, Y.; Kim, D.; Jeong, S.; Cho, Y.; Lee, S.; Ahn, S.; Kim, J. EMI reduction methods in wireless power transfer system for drone electrical charger using tightly coupled three-phase resonant magnetic field. IEEE Trans. Ind. Electron. 2018, 65, 6839–6849. [Google Scholar] [CrossRef]
- Sharma, V.; You, I.; Jayakody, D.N.K.; Reina, D.G.; Choo, K.-K.R. Neural-blockchain-based ultrareliable caching for edge-enabled UAV networks. IEEE Trans. Ind. Inform. 2019, 15, 5723–5736. [Google Scholar] [CrossRef]
- Liu, C.H.; Piao, C.; Tang, J. Energy-Efficient UAV crowdsensing with multiple charging stations by deep learning. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; pp. 199–208. [Google Scholar] [CrossRef]
- Hassija, V.; Chamola, V.; Krishna, D.N.G.; Guizani, M. A distributed framework for energy trading between UAVs and charging stations for critical applications. IEEE Trans. Veh. Technol. 2020, 69, 5391–5402. [Google Scholar] [CrossRef]
- Qin, C.; Li, P.; Liu, J.; Liu, J. Blockchain-enabled charging scheduling for unmanned vehicles in smart cities. J. Internet Technol. 2021, 22, 327–337. [Google Scholar]
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Shirmohammadi, R. Considerable parameters of using PV cells for so-lar-powered aircrafts. Renew. Sustain. Energy Rev. 2013, 22, 81–91. [Google Scholar] [CrossRef]
- Thipyopas, C.; Sripawadkul, V.; Warin, N. Design and development of a small solar-powered UAV for environmental monitoring application. In Proceedings of the 2019 IEEE Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 3–6 October 2019; pp. 316–319. [Google Scholar] [CrossRef]
- Wu, J.; Wang, H.; Huang, Y.; Su, Z.; Zhang, M. Energy management strategy for solar-powered UAV long-endurance target tracking. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1878–1891. [Google Scholar] [CrossRef]
- Gao, X.Z.; Hou, Z.X.; Guo, Z.; Chen, X.Q. Reviews of methods to extract and store energy for solar-powered air-craft. Renew. Sustain. Energy Rev. 2015, 44, 96–108. [Google Scholar] [CrossRef]
- Achtelik, M.C.; Stumpf, J.; Gurdan, D.; Doth, K.-M. Design of a flexible high performance quadcopter platform breaking the MAV endurance record with laser power beaming. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 5166–5172. [Google Scholar]
- Ouyang, J.; Che, Y.; Xu, J.; Wu, K. Throughput maximization for laser-powered UAV wireless communication systems. In Proceedings of the 2018 IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Chen, Q.; Zhang, D.; Zhu, D.; Shi, Q.; Gu, J.; Ai, Y. Design and experiment for realization of laser wireless power transmission for small unmanned aerial vehicles. Int. Soc. Opt. Photonics 2015, 9671, 96710N. [Google Scholar] [CrossRef]
- Lee, S.; Lim, N.; Choi, W.; Lee, Y.; Baek, J.; Park, J. Study on battery charging converter for MPPT control of laser wireless power transmission system. Electronics 2020, 9, 1745. [Google Scholar] [CrossRef]
- Kim, Y.; Shin, H.B.; Lee, W.H.; Jung, S.H.; Kim, C.Z.; Kim, H.; Lee, Y.T.; Kang, H.K. 1080 nm InGaAs laser power converters grown by MOCVD using InAlGaAs metamorphic buffer layers. Sol. Energy Mater. Sol. Cells 2019, 200, 109984. [Google Scholar] [CrossRef]
- Zhang, Q.; Fang, W.; Liu, Q.; Wu, J.; Xia, P.; Yang, L. Distributed laser charging: A wireless power transfer approach. IEEE Internet Things J. 2018, 5, 3853–3864. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, M.T.; Nguyen, C.V.; Truong, L.H.; Le, A.M.; Quyen, T.V.; Masaracchia, A.; Teague, K.A. Electromagnetic field based wpt technologies for UAVs: A comprehensive survey. Electronics 2020, 9, 461. [Google Scholar] [CrossRef] [Green Version]
- El Haber, E.; Alameddine, H.A.; Assi, C.; Sharafeddine, S. UAV-aided ultra-reliable low-latency computation offloading in future IoT networks. IEEE Trans. Commun. 2021, 69, 6838–6851. [Google Scholar] [CrossRef]
- Wang, L.; Che, Y.L.; Long, J.; Duan, L.; Wu, K. Multiple access mmWave design for UAV-aided 5G communications. IEEE Wirel. Commun. 2019, 26, 64–71. [Google Scholar] [CrossRef]
- Che, Y.; Lai, Y.; Luo, S.; Wu, K.; Duan, L. UAV-aided information and energy transmissions for cognitive and sustainable 5G networks. IEEE Trans. Wirel. Commun. 2020, 20, 1668–1683. [Google Scholar] [CrossRef]
- Giyenko, A.; Im Cho, Y. Intelligent UAV in smart cities using IoT. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 207–210. [Google Scholar]
- Feng, W.; Wang, J.; Chen, Y.; Wang, X.; Ge, N.; Lu, J. UAV-aided MIMO communications for 5G internet of things. IEEE Internet Things J. 2018, 6, 1731–1740. [Google Scholar] [CrossRef] [Green Version]
- Motlagh, N.H.; Taleb, T.; Arouk, O. Low-altitude unmanned aerial vehicles-based internet of things services: Comprehensive survey and future perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Reinecke, M.; Prinsloo, T. The influence of drone monitoring on crop health and harvest size. In Proceedings of the 2017 1st International Conference on Next Generation Computing Applications (NextComp), Reduit, Mauritius, 19–21 July 2017; pp. 5–10. [Google Scholar]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-enabled intelligent transportation systems for the smart city: Applications and challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Elloumi, M.; Dhaou, R.; Escrig, B.; Idoudi, H.; Saidane, L.A. Monitoring road traffic with a UAV-based system. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Tiansawat, P.; Elliott, S. Unmanned Aerial Vehicles for Automated Forest Restoration. Available online: https://www.researchgate.net/profile/Stephen-Elliott-2/publication/350688583_Unmanned_Aerial_Vehicles_for_Automated_Forest_Restoration/links/614b3f56a3df59440ba46d20/Unmanned-Aerial-Vehicles-for-Automated-Forest-Restoration.pdf (accessed on 1 May 2022).
- De Almeida, D.R.A.; Broadbent, E.N.; Ferreira, M.P.; Meli, P.; Zambrano, A.M.A.; Gorgens, E.B.; Resende, A.F.; de Almeida, C.T.; Amaral, C.H.D.; Corte, A.P.D.; et al. Monitoring restored tropical forest diversity and structure through UAV-borne hyperspectral and lidar fusion. Remote Sens. Environ. 2021, 264, 112582. [Google Scholar] [CrossRef]
- Moura, M.; de Oliveira, L.; Sanquetta, C.; Bastos, A.; Mohan, M.; Corte, A. Towards amazon forest restoration: Automatic detection of species from UAV imagery. Remote Sens. 2021, 13, 2627. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, X.; Li, W.; Chen, S. Automatic power line inspection using UAV images. Remote Sens. 2017, 9, 824. [Google Scholar] [CrossRef] [Green Version]
- Foudeh, H.A.; Luk, P.C.-K.; Whidborne, J.F. An advanced unmanned aerial vehicle (UAV) approach via learning-based control for overhead power line monitoring: A comprehensive review. IEEE Access 2021, 9, 130410–130433. [Google Scholar] [CrossRef]
- Khan, M.A.; Ullah, I.; Kumar, N.; Oubbati, O.S.; Qureshi, I.M.; Noor, F.; Khanzada, F.U. An efficient and secure certificate-based access control and key agreement scheme for flying ad-hoc networks. IEEE Trans. Veh. Technol. 2021, 70, 4839–4851. [Google Scholar] [CrossRef]
- Jiang, B.; Yang, J.; Song, H. Protecting Privacy from Aerial photography: State of the Art, Opportunities, and Challenges. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 799–804. [Google Scholar]
- Krishna, C.G.L.; Murphy, R.R. A review on cybersecurity vulnerabilities for unmanned aerial vehicles. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 194–199. [Google Scholar] [CrossRef]
- Vattapparamban, E.; Güvenç, I.; Yurekli, A.I.; Akkaya, K.; Uluağaç, S. Drones for smart cities: Issues in cybersecurity, privacy, and public safety. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 216–221. [Google Scholar]
- Mansfield, K.; Eveleigh, T.; Holzer, T.H.; Sarkani, S. Unmanned aerial vehicle smart device ground control station cyber security threat model. In Proceedings of the 2013 IEEE International Conference on Technologies for Homeland Security (HST), Waltham, MA, USA, 12–14 November 2013; pp. 722–728. [Google Scholar] [CrossRef]
- He, D.; Chan, S.; Guizani, M. Communication security of unmanned aerial vehicles. IEEE Wirel. Commun. 2016, 24, 134–139. [Google Scholar] [CrossRef]
- Birnbaum, Z.; Dolgikh, A.; Skormin, V.; O’Brien, E.; Muller, D.; Stracquodaine, C. Unmanned aerial vehicle security using behavioral profiling. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 1310–1319. [Google Scholar]
- Sands, T. Virtual Sensoring of motion using pontryagin’s treatment of hamiltonian systems. Sensors 2021, 21, 4603. [Google Scholar] [CrossRef] [PubMed]
- Carrio, A.; Sampedro, C.; Rodriguez-Ramos, A.; Campoy, P. A review of deep learning methods and applications for unmanned aerial vehicles. J. Sens. 2017, 2017, 3296874. [Google Scholar] [CrossRef]
- Sandberg, A.; Sands, T. Autonomous trajectory generation algorithms for spacecraft slew maneuvers. Aerospace 2022, 9, 135. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Nordin, R.; Abu Samah, A.; Alsharif, M.H.; Khan, M.A. Topology-based routing protocols and mobility models for flying ad hoc networks: A contemporary review and future research directions. Drones 2021, 6, 9. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y.; Guizani, M. Secure UAV communication networks over 5G. IEEE Wirel. Commun. 2019, 26, 114–120. [Google Scholar] [CrossRef]
- Mehta, P.; Gupta, R.; Tanwar, S. Blockchain envisioned UAV networks: Challenges, solutions, and comparisons. Comput. Commun. 2020, 151, 518–538. [Google Scholar] [CrossRef]
- Kumari, A.; Gupta, R.; Tanwar, S.; Kumar, N. A taxonomy of blockchain-enabled softwarization for secure UAV network. Comput. Commun. 2020, 161, 304–323. [Google Scholar] [CrossRef]
- Khan, M.A.; Qureshi, I.M.; Khan, I.U.; Nasim, M.A.; Javed, U.; Khan, M.W. On the performance of flying ad-hoc Network (FANET) with directional antennas. In Proceedings of the 2018 5th International Multi-Topic ICT Conference (IMTIC), Jamshoro, Pakistan, 25–27 April 2018; pp. 1–8. [Google Scholar]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

| Reference | Year | Research Focus |
|---|---|---|
| [20] | 2015 | This study surveys major collision avoidance mechanisms discussed in different publications. These mechanisms are based on sensing, detection and collision avoidance. Authors briefly explained various characteristics, benefits and drawbacks. |
| [21] | 2016 | This survey addresses the characteristics of UAVs for civil applications over the period 2000 to 2015 considering networking and communication aspects. Authors surveyed the data requirements, network mission parameters and quality of service requirements. Moreover, they elaborated common networking requirements including scalability, security, privacy, safety, adaptability and connectivity. |
| [22] | 2017 | This study discusses open-source flight controllers, which are being used for academic research. It also introduces UAV along with required components. This study fully addresses software and hardware open-source flight controller platforms. |
| [23] | 2018 | The study focuses on UAV cellular communication and bridges the gap between 3GPP standardization status quo and the future research. Specifically, it addresses downlink command and control (C&C) channel for aerial users. |
| [24] | 2019 | This study presents a comprehensive survey of UAV developments and its integration into cellular networks. It highlights consumer UAVs, interferences challenges and mitigative solutions, UAV prototype and testbed activities, regulations, challenges and security issues of UAV-aided cellular communications. |
| [25] | 2019 | This study provides a comprehensive tutorial on applications and advantages of UAVs in wireless communication. It investigates potential challenges and important trade-offs in UAV-assisted wireless networks. It highlights key factors including energy efficiency, channel modeling, performance analysis and 3D deployment. It also describes several mathematical tools and analytical frameworks including game theory, transport theory, stochastic geometry, machine learning, and optimization theory. |
| [26] | 2019 | This study surveys UAV communication towards 5G/B5G wireless networks. It discusses space-air-ground integrated networks and associated challenges. It also identifies several open research problems and future research directions. |
| [27] | 2019 | This study presents a comprehensive survey on the integration UAV-enabled wireless networks and of 5G mmWave communication. It highlights existing research problems and cutting-edge solutions. This study also points out open issues and sheds new light on future research directions. |
| [28] | 2020 | This article presents a comprehensive study on UAV regulations, potential applications and challenges. Particularly, it addresses challenges including security, energy harvesting techniques, optimal trajectory, collision avoidance, interference mitigation, channel modeling and UAV standardization. Finally, it presents several problems and future research directions. |
| [29] | 2020 | This study focuses on Network Function Virtualization (NFV) and Software-Defined Network (SDN) technologies. In addition, it presents an in-depth analysis of use cases, classifications and challenges of UAVs. It also discusses NFV/SDN-assisted UAV systems along with different case studies and issues. Finally, it outlines open research problems, high level insights, and future research directions. |
| [30] | 2020 | This study is dedicated to the safety of UAVs from three different aspects such as communications, sensors and multiple UAVs. |
| [31] | 2020 | This survey presents a generic review on several applications of multi-UAV systems. Moreover, it provides architectural and nomenclature taxonomy. Finally, it discusses UAV challenges and current trends. |
| [32] | 2021 | This article carries out a comprehensive survey on green UAV communications for future 6G networks. In particular, it introduces the typical UAVs and their energy consumption models. It also discusses the typical trends and typical applications of UAVs. Finally, it investigates open research issues and several promising techniques. |
| [33] | 2021 | This study presents general architecture of UAV prototype along with experimental demonstration for UAV energy consumption model and air-to-ground channel models. In the end, it highlights some promising future directions for UAV prototype and experimental verifications. |
| [34] | 2021 | This study provides deep learning techniques for vehicle detection from UAV aerial images. It focuses on accuracy enhancement, computation overhead reduction and optimization objective. This study will help researchers in the area of traffic surveillance and artificial intelligence. |
| Types of UAVs | Number of Propellers |
|---|---|
| Octocopter | 8 |
| Hexacopter | 6 |
| Quadcopter | 4 |
| Tricopter | 3 |
| Types of UAVs | Key Features |
|---|---|
| Fixed-Wing | High speed, long endurance |
| Fixed-Wing Hybrid | Long endurance, VTOL |
| Single Rotor | Long endurance, hovering, VTOL |
| Multirotor | Short endurance, hovering, VTOL |
| Link | Data Type | Data Rate | Critical |
|---|---|---|---|
| Downlink | Radio control (PDCCH) | N/A | Yes |
| Synchronization (SSS/PSS) | Yes | ||
| Command and Control (C&C) | 60–100 kbps | Yes | |
| Uplink | Command and Control (C&C) | 60–100 kbps | Yes |
| Application data | Up to 50 Mbps | No |
| Reference | Year | Research Focus |
|---|---|---|
| [15] | 2017 | Lightweight WPT system for the mid-air charging of drones. |
| [16] | 2018 | WPT techniques for UAVs. A review, extensions and reconceptualization. |
| [18] | 2018 | Designing of drone battery charging system through wireless power transfer (WPT). |
| [70] | 2018 | WPT system to charge autonomous electric UAV using a small secondary coil. |
| [80] | 2018 | WPT technology-based drone charging stations to charge drone over the buildings. |
| [19] | 2019 | Auction-enabled charge scheduling using deep learning framework for a network of multiple drones. |
| [67] | 2019 | WPT based sleep/active method for a drone charging station in smart agriculture. |
| [81] | 2019 | Neural blockchain-empowered assistance for drone swarms. |
| [82] | 2020 | Energy-efficient UAV crowd-sensing through multiple charging stations using deep learning. |
| [83] | 2020 | Novel application of a distributed network of charging stations and UAVs through advanced blockchain. |
| [84] | 2021 | Blockchain-empowered charge scheduling for UAVs in smart cities. |
| Company | PV Cell | Dimension (mm) | Weight (g/m3) | Flexibility | Efficiency (%) |
|---|---|---|---|---|---|
| Gochermann Solar technology | SunPower C60 | 125 × 125 | 950–1000 | Semi-flex | 22.6 |
| Gochermann Solar technology | SunPower E60 | 125 × 125 | - | Semi-flex | 23.8 |
| Bsolar | TG18.5BR | 156 × 156 | - | - | 17.5–18.39 |
| Delsolar | D6F | 156 × 156 | - | - | 18–20 |
| Gochermann Solar technology | SunPower A300 | 125 × 125 | - | - | 20 min |
| IXYS (IXOLAR) | KXOB22-12X1 | 27 × 7 | 2645 | Semi-flex | 22 |
| Bosch Solar Energy | M3BB | 156 × 156 | 1027 | No-flex | 18.43 |
| SunOWE | 156 MM | 156 × 156 | 1027 | No-flex | 18.2 |
| PV Material | GaAs | Si | InGaAs | InGaP | CIS | ||
|---|---|---|---|---|---|---|---|
| Laser Wavelength | 810 nm | 950 nm | >1000 nm | >1000 nm | >1000 nm | ||
| PV Cell Efficiency (%) | 60 | 53.4 | 28 | 27.7 | 40.6 | 40 | 19.7 |
| Laser Intensity (kW/m2) | 110 | 430 | 110 | 10 | 2.37 | 2.6 | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. https://doi.org/10.3390/drones6060147
Mohsan SAH, Khan MA, Noor F, Ullah I, Alsharif MH. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones. 2022; 6(6):147. https://doi.org/10.3390/drones6060147
Chicago/Turabian StyleMohsan, Syed Agha Hassnain, Muhammad Asghar Khan, Fazal Noor, Insaf Ullah, and Mohammed H. Alsharif. 2022. "Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review" Drones 6, no. 6: 147. https://doi.org/10.3390/drones6060147
APA StyleMohsan, S. A. H., Khan, M. A., Noor, F., Ullah, I., & Alsharif, M. H. (2022). Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones, 6(6), 147. https://doi.org/10.3390/drones6060147