
Lyapunov Stability of a Planar Vertical Take-Off and Landing Aircraft Exerting a Force in the Environment



Abstract
:1. Introduction
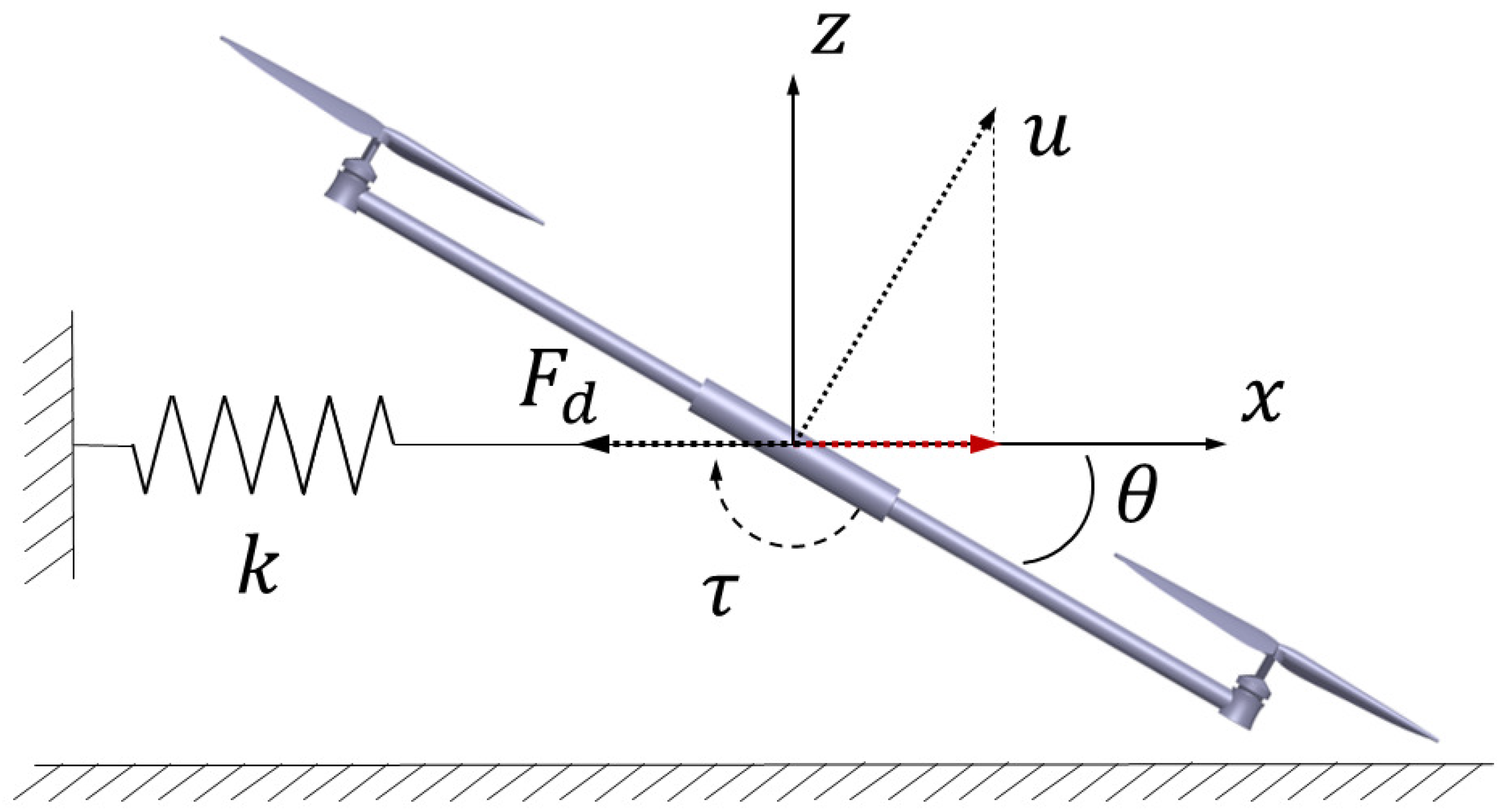
2. PVTOL Model with Constant Force
3. Control Strategy for the Horizontal Displacement
4. Control Strategy for the Orientation Angle
5. Simulation
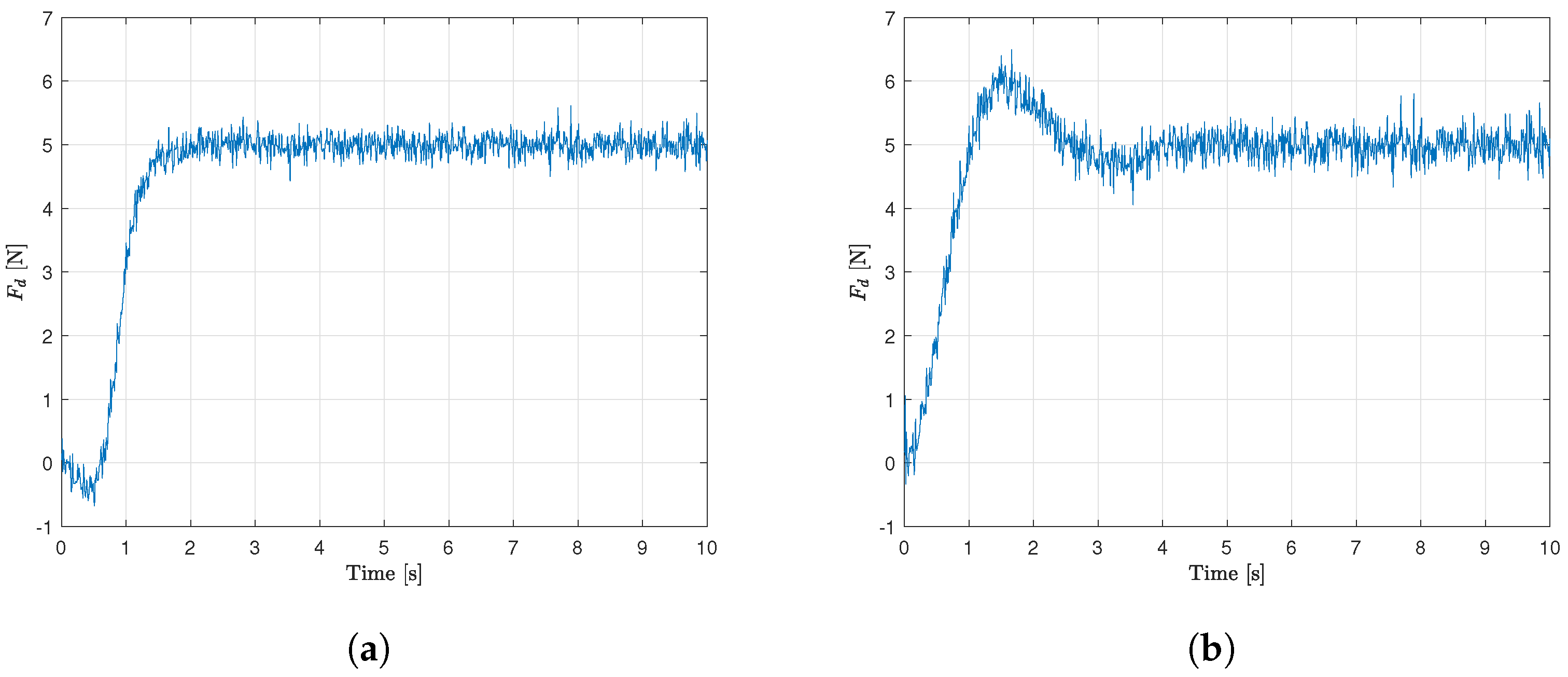
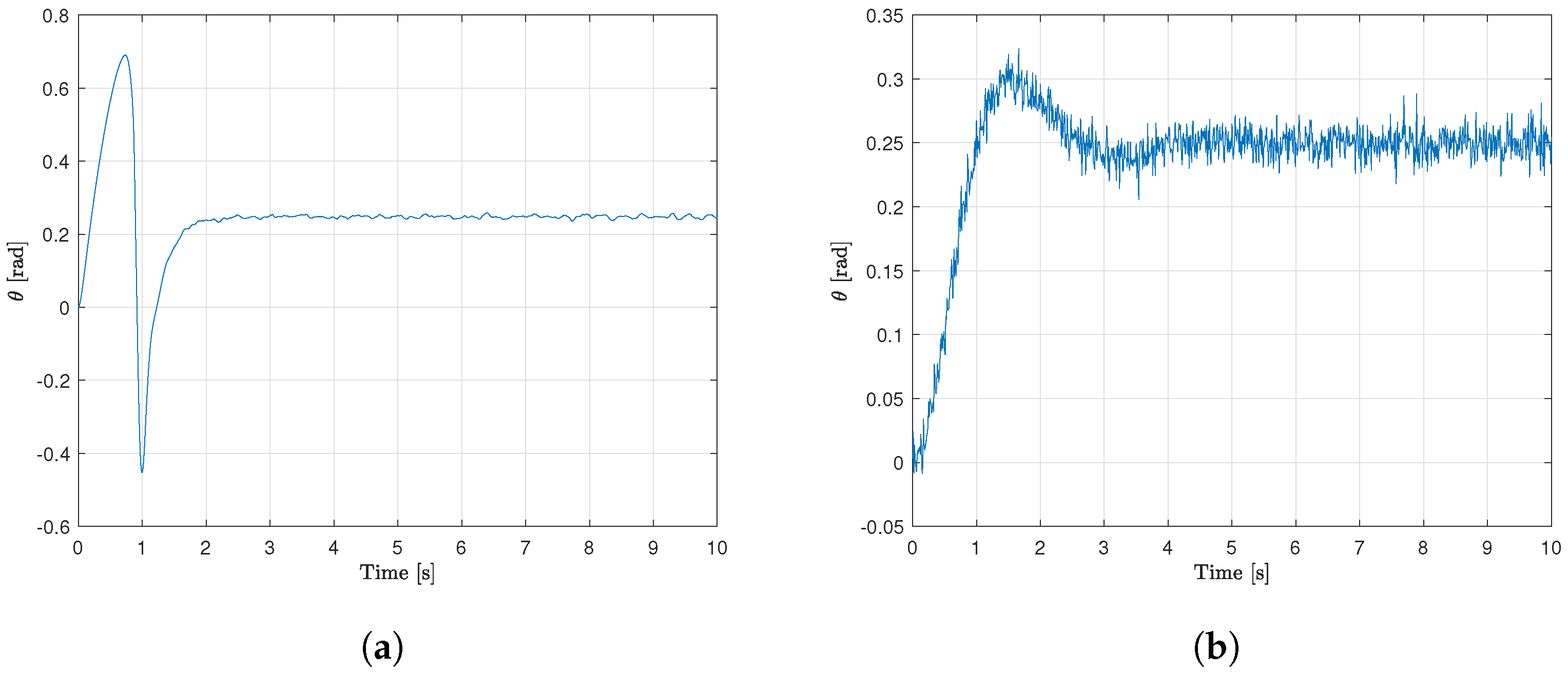
6. Results
7. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PVTOL | Planar Vertical Takeoff and Landing |
| DFAV | Ducted-Fan Aerial Vehicle |
| UAV | Unmanned Aerial Vehicle |
| CMOS | Complementary Metal-Oxide-Semiconductor |
References
- Aguilar-Ibañez, C. Stabilization of the PVTOL aircraft based on a sliding mode and a saturation function. Int. J. Robust Nonlinear Control 2017, 27, 843–859. [Google Scholar] [CrossRef]
- Hernández-Castañeda, F.; Santibáñez, V.; Jurado, F. Priority altitude PVTOL aircraft control via immersion and invariance. Int. J. Control 2020, 93, 2290–2301. [Google Scholar] [CrossRef]
- Aguilar-Ibañez, C.; Suarez-Castanon, M.S.; Meda-Campaña, J.; de Jesús Rubio, J.; Martínez-Castro, J.; Barrón-Fernández, R. Shaping Energy for the Stabilization of an Unmanned Aircfrat. In Proceedings of the 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 5–7 September 2018; pp. 1–5. [Google Scholar]
- Aguilar-Ibañez, C.; Suarez-Castanon, M.S.; Meda-Campaña, J.; Gutierrez-Frias, O.; Merlo-Zapata, C.; Martinez-Castro, J.A. A simple approach to regulate a pvtol system using matching conditions. J. Intell. Robot. Syst. 2020, 98, 511–524. [Google Scholar] [CrossRef]
- Cariño Escobar, J.; Lozano, R.; Bonilla Estrada, M. Two PVTOLs cooperative slung-load transport control based on passivity. Adv. Control Appl. Eng. Ind. Syst. 2020, 2, e22. [Google Scholar] [CrossRef]
- Aguilar-Ibañez, C.; Sira-Ramirez, H.; Suarez-Castanon, M.S.; Garrido, R. Robust trajectory-tracking control of a PVTOL under crosswind. Asian J. Control 2019, 21, 1293–1306. [Google Scholar] [CrossRef]
- Yao, Q. Robust constrained trajectory tracking control for a PVTOL aircraft subject to external disturbances. Int. J. Syst. Sci. 2021, 52, 2617–2629. [Google Scholar] [CrossRef]
- Kobayashi, T.; Ueda, A.; Imae, J.; Zhai, G. Obstacle avoidance control for PVTOLs based on a virtual space approach. In Proceedings of the 2009 International Conference on Networking, Sensing and Control, Okayama, Japan, 26–29 March 2009; pp. 868–872. [Google Scholar]
- Gentili, L.; Naldi, R.; Marconi, L. Modeling and control of VTOL UAVs interacting with the environment. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 1231–1236. [Google Scholar]
- Marconi, L.; Naldi, R. Control of aerial robots: Hybrid force and position feedback for a ducted fan. IEEE Control Syst. Mag. 2012, 32, 43–65. [Google Scholar]
- Forte, F.; Naldi, R.; Macchelli, A.; Marconi, L. Impedance control of an aerial manipulator. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 3839–3844. [Google Scholar]
- Forte, F.; Naldi, R.; Macchelli, A.; Marconi, L. On the control of an aerial manipulator interacting with the environment. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4487–4492. [Google Scholar]
- Huerzeler, C.; Naldi, R.; Lippiello, V.; Carloni, R.; Nikolic, J.; Alexis, K.; Siegwart, R. Airobots: Innovative aerial service robots for remote inspection by contact. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–8 November 2013; p. 2080. [Google Scholar]
- Albers, A.; Trautmann, S.; Howard, T.; Nguyen, T.A.; Frietsch, M.; Sauter, C. Semi-autonomous flying robot for physical interaction with environment. In Proceedings of the 2010 IEEE Conference on Robotics, Automation and Mechatronics, Singapore, 28–30 June 2010; pp. 441–446. [Google Scholar]
- Fumagalli, M.; Naldi, R.; Macchelli, A.; Carloni, R.; Stramigioli, S.; Marconi, L. Modeling and control of a flying robot for contact inspection. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 3532–3537. [Google Scholar]
- Jung, S. A position-based force control approach to a quad-rotor system. In Proceedings of the 2012 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Daejeon, Korea, 26–28 November 2012; pp. 373–377. [Google Scholar]
- Jeong, S.H.; Jung, S. Bilateral teleoperation control of a quadrotor system with a haptic device: Experimental studies. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 543–548. [Google Scholar]
- Nguyen, T.W.; Hosseinzadeh, M.; Garone, E. Thrust vector control of constrained multibody systems. Automatica 2021, 129, 109586. [Google Scholar] [CrossRef]
- Shi, F.; Zhao, M.; Anzai, T.; Ito, K.; Chen, X.; Nozawa, S.; Inaba, M. Multi-rigid-body dynamics and online model predictive control for transformable multi-links aerial robot. Adv. Robot. 2019, 33, 971–984. [Google Scholar] [CrossRef]
- Gruszka, A.; Malisoff, M.; Mazenc, F. On tracking for the PVTOL model with bounded feedbacks. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 1428–1433. [Google Scholar]
- Wopereis, H.W.; Hoekstra, J.J.; Post, T.H.; Folkertsma, G.A.; Stramigioli, S.; Fumagalli, M. Application of substantial and sustained force to vertical surfaces using a quadrotor. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2704–2709. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Condition | Value | Constant | Value | Gain | Value |
|---|---|---|---|---|---|
| 0 (m) | 5 (N/m) | 20 | |||
| 0 (m/s) | 5 (N) | 5 | |||
| 0 (rad) | m | 2 (kg) | 30 | ||
| 0 (rad/s) | g | 9.81 (m/s2) | 30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lozano, R.; Calderón, S.; González-Hernández, I. Lyapunov Stability of a Planar Vertical Take-Off and Landing Aircraft Exerting a Force in the Environment. Drones 2022, 6, 144. https://doi.org/10.3390/drones6060144
Lozano R, Calderón S, González-Hernández I. Lyapunov Stability of a Planar Vertical Take-Off and Landing Aircraft Exerting a Force in the Environment. Drones. 2022; 6(6):144. https://doi.org/10.3390/drones6060144
Chicago/Turabian StyleLozano, Rogelio, Samantha Calderón, and Iván González-Hernández. 2022. "Lyapunov Stability of a Planar Vertical Take-Off and Landing Aircraft Exerting a Force in the Environment" Drones 6, no. 6: 144. https://doi.org/10.3390/drones6060144
APA StyleLozano, R., Calderón, S., & González-Hernández, I. (2022). Lyapunov Stability of a Planar Vertical Take-Off and Landing Aircraft Exerting a Force in the Environment. Drones, 6(6), 144. https://doi.org/10.3390/drones6060144