


Deep Learning-Based Energy Optimization for Edge Device in UAV-Aided Communications
 ,
,
Abstract
:1. Introduction
- (1)
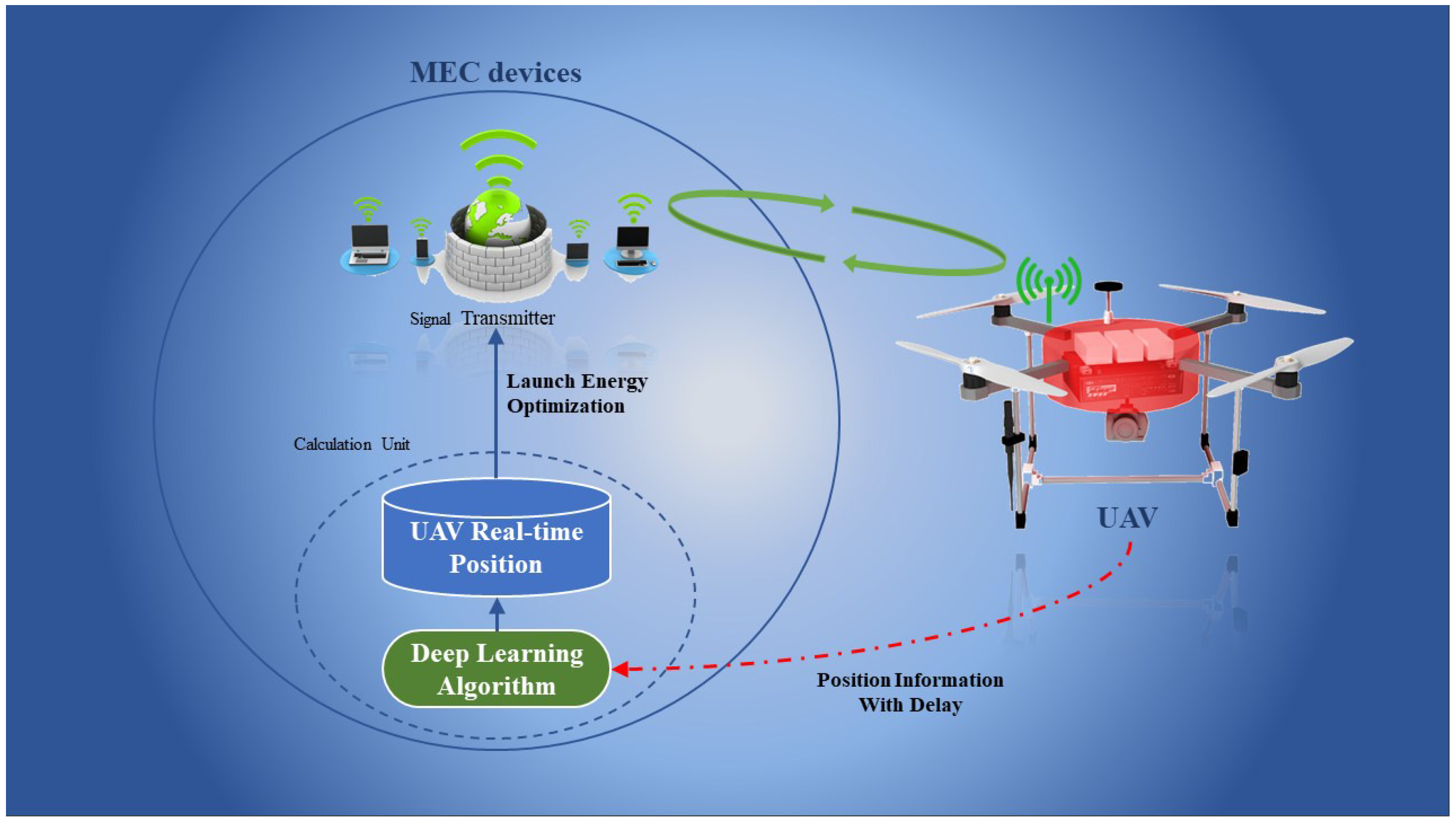
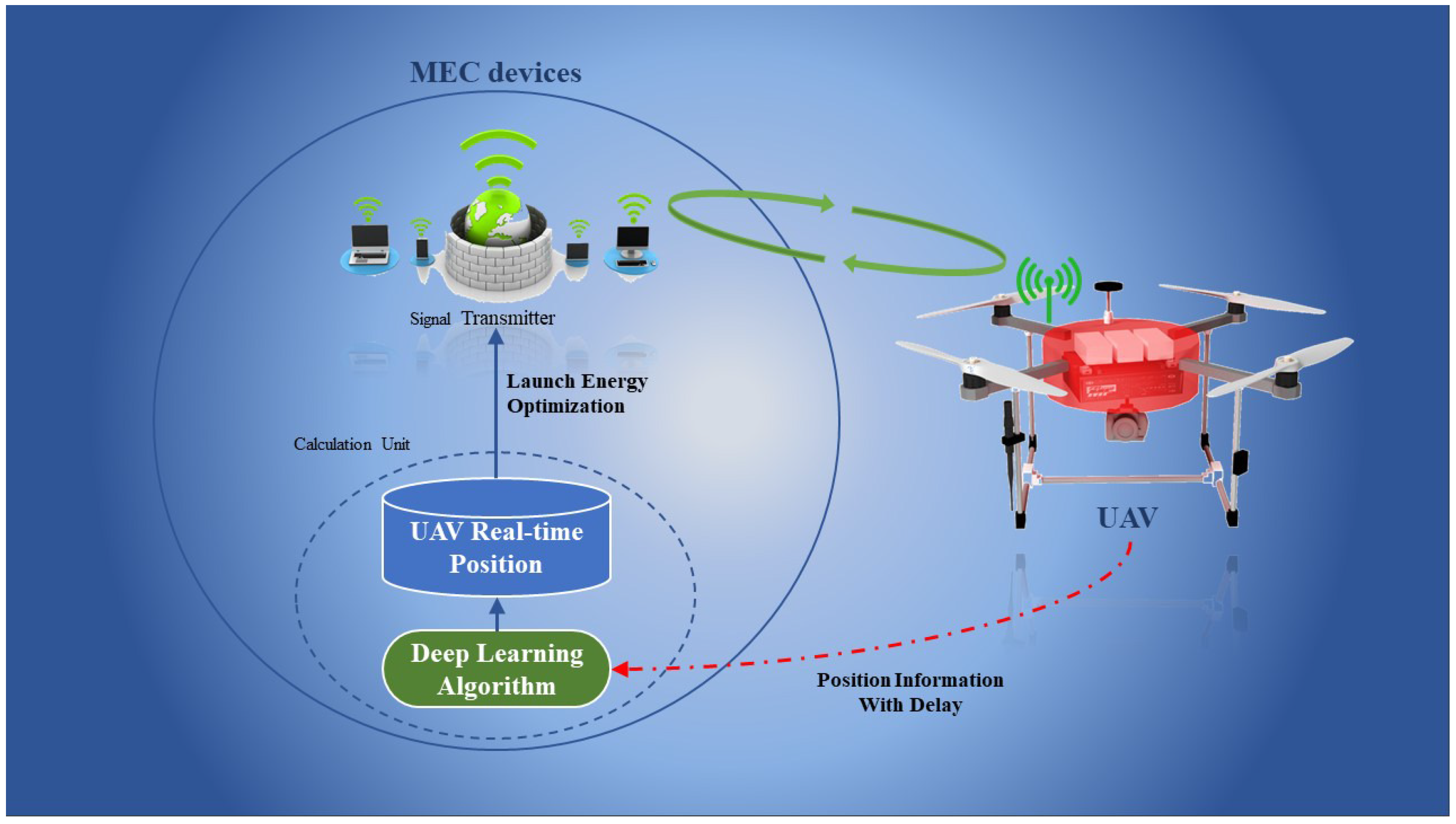
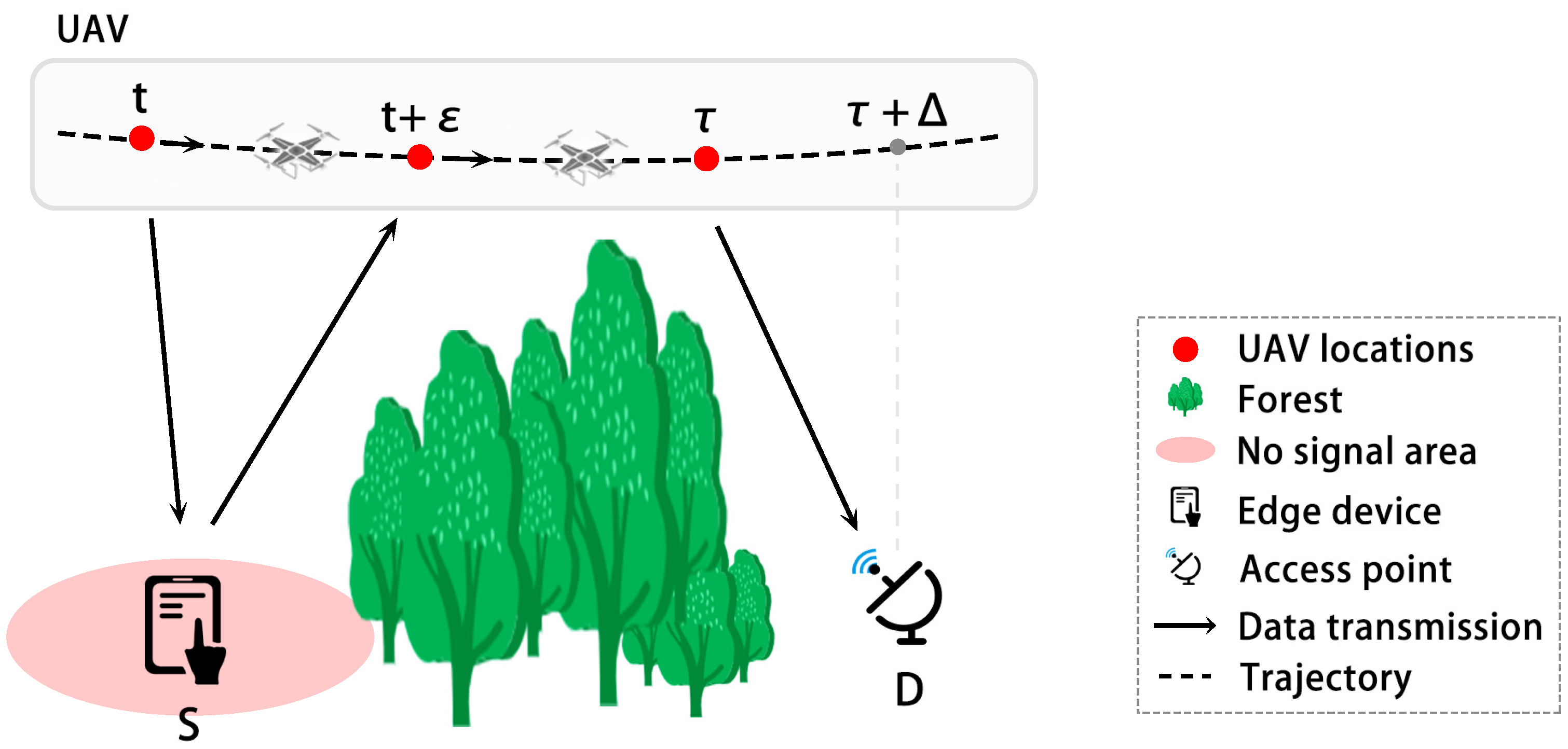
- Considering the power consumption problem of EDs transmission, we formulate an adaptive adjustment algorithm, which establishes a full-duplex relay network using UAVs and makes UAVs talk with EDs in real-time to understand the position relationship between EDs and relay UAVs and adjust the emission energy of EDs.
- (2)
- Considering that a communication delay will lead to an information transfer lag, we discuss the impact of a time delay on communication performance and find that an incorrect distance calculation is the main factor affecting the success of signal transmission. We propose a deep learning-based energy optimization algorithm, which can optimize the transmitter energy allocation under a certain response delay threshold.
- (3)
- Considering the impact of different system delays on communication systems, we test the performance of a variety of DL prediction algorithms in different time-delay systems. At the same time, the proposed adaptive energy optimization algorithm is tested and discussed by simulation experiments.
2. UAV-Aided Wireless Network System Model
3. Problem Analysis and Optimization
3.1. Problem Formulation
3.2. Adaptive Energy Regulation of EDs
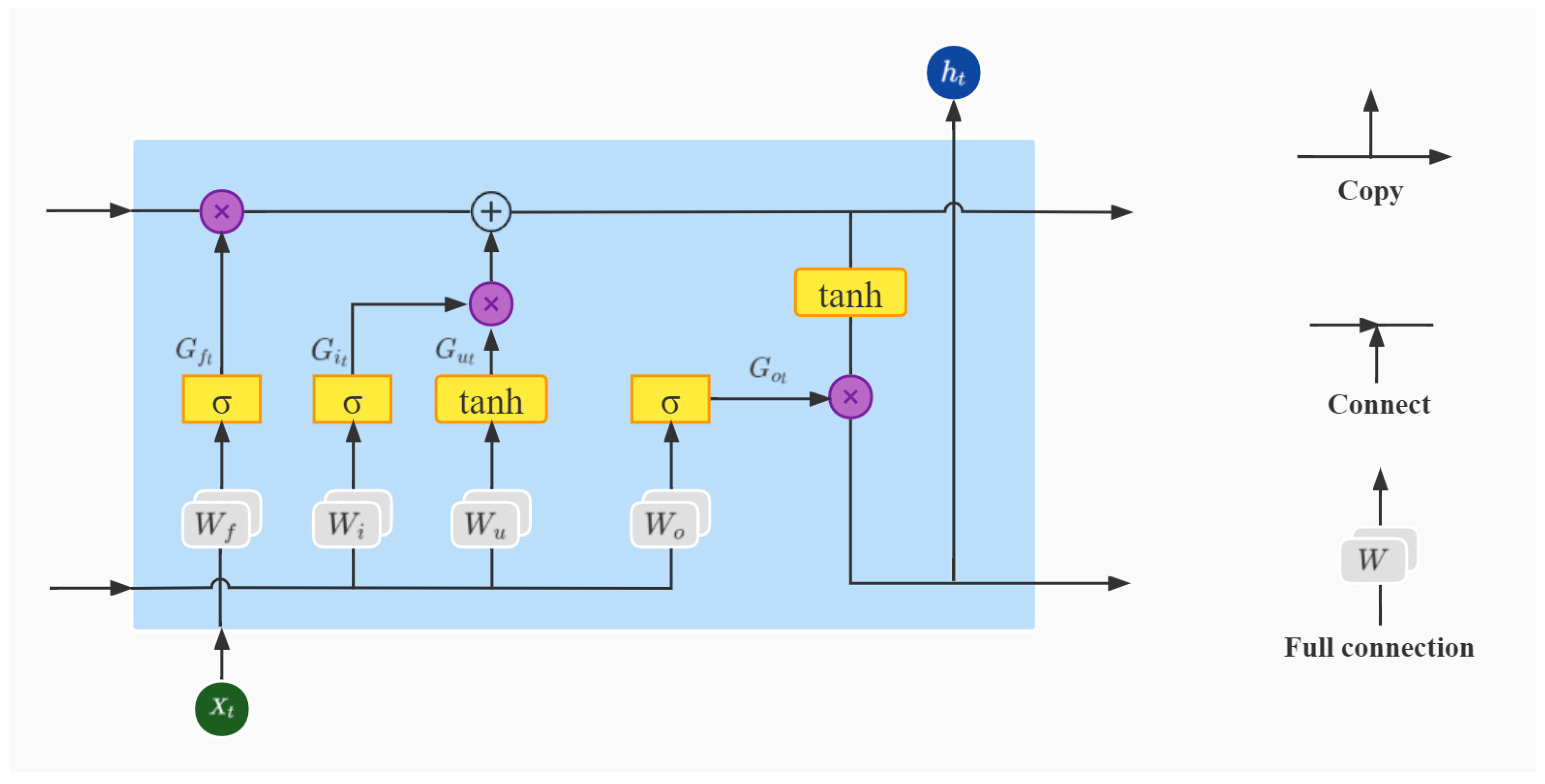
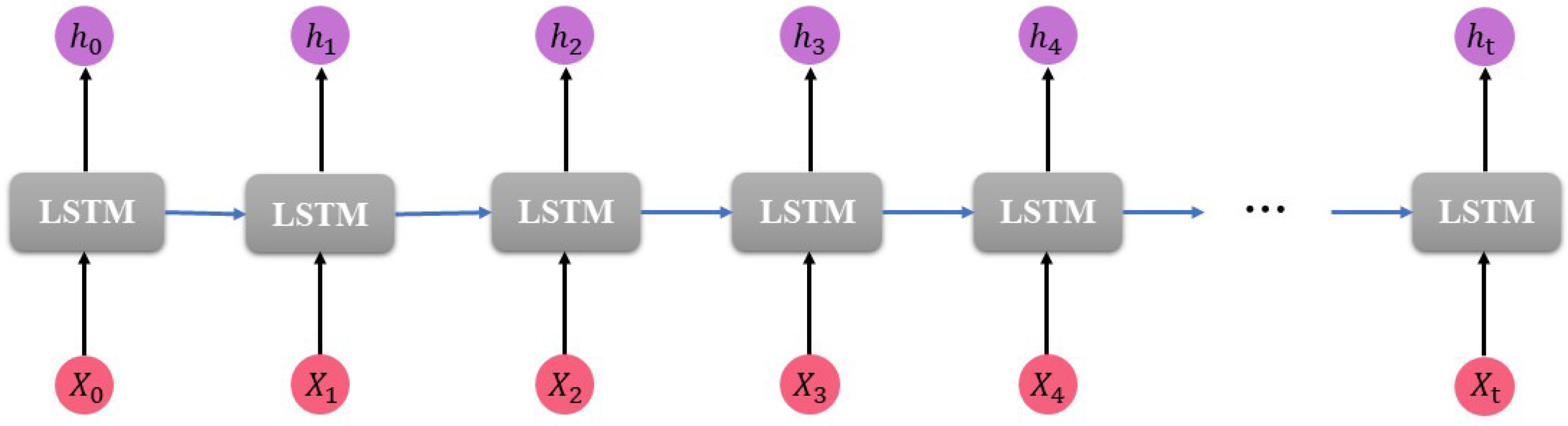
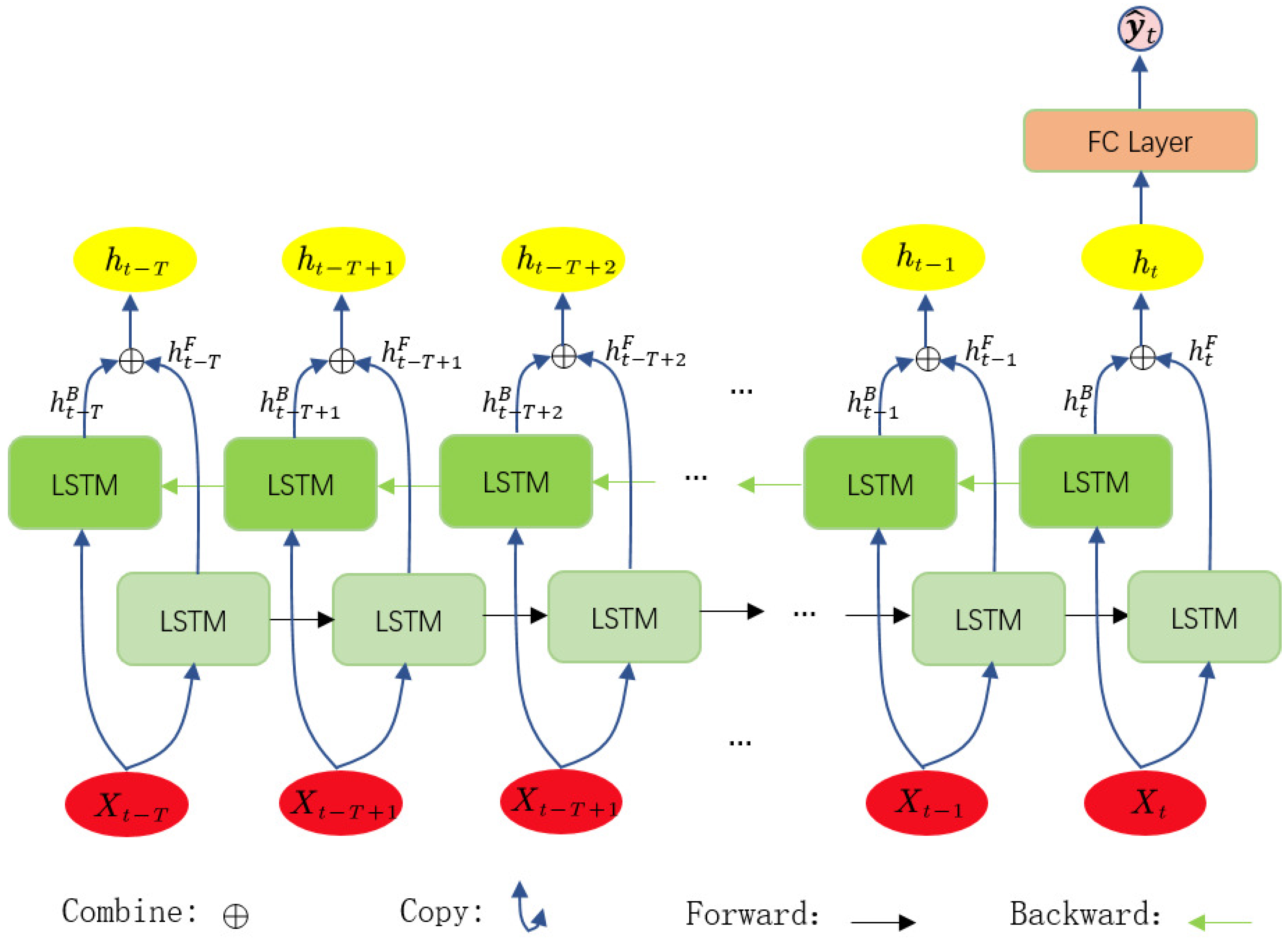
3.2.1. DL
3.2.2. The DEO
| Algorithm 1 The DEO |
| Require: , , , , , , , ; Ensure: ;
|
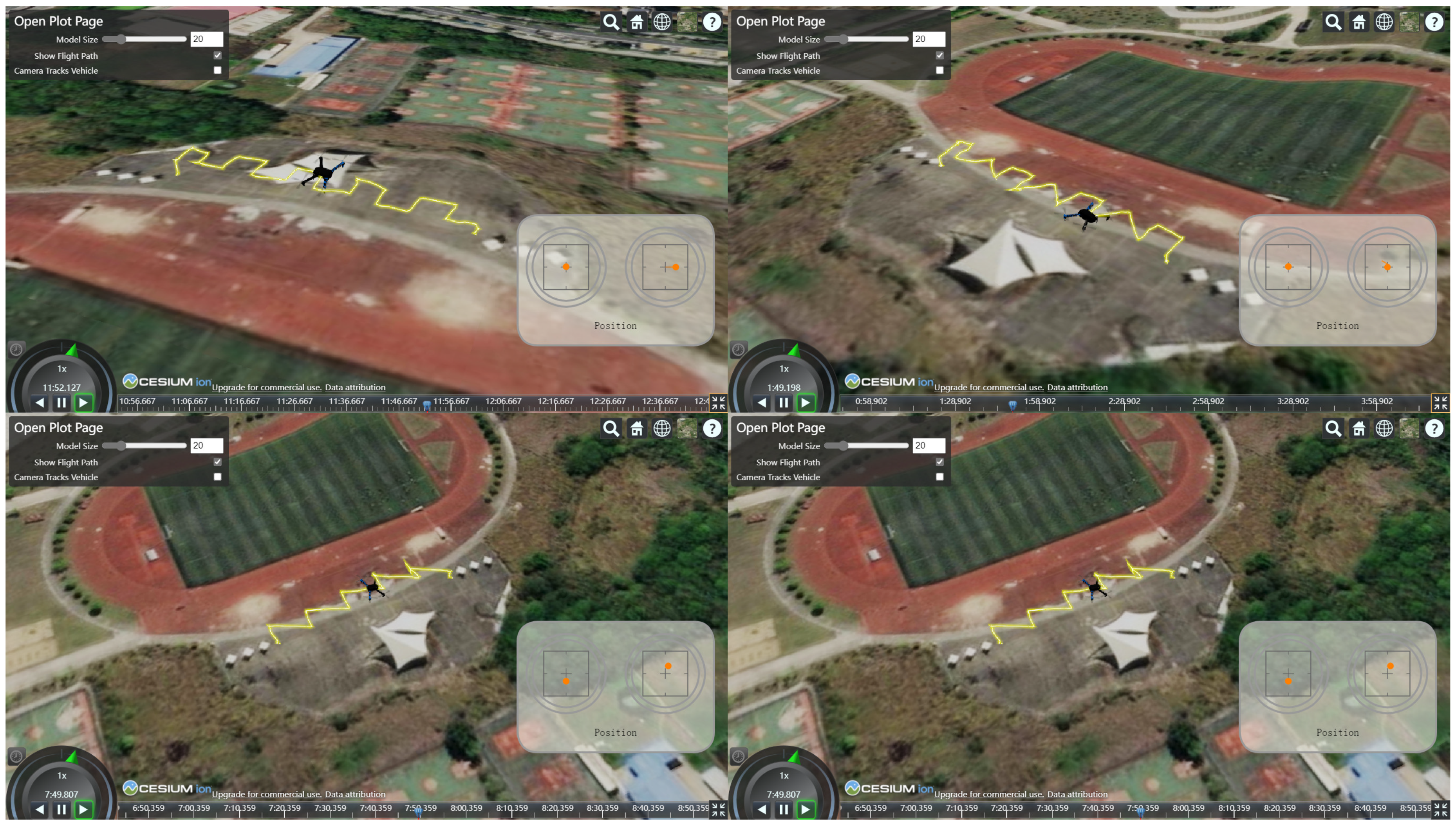
4. Experiments and Results
- Global longitude, which is used to account for the movement of the UAV in the longitude direction.
- Global latitude, which is used to account for the movement of the UAV in the latitude direction.
- Height above ground, the height above ground relative to the altitude of the starting UAV, which is used to account for the movement of the UAV in the direction perpendicular to the ground.
5. Conclusions
- The complex environment can interfere with the establishment of communication links. In this paper, we mainly consider UAV communication in an LOS environment. Although the air environment will make the communication environment more friendly, during the mission, UAV communication may be interfered with by many aspects, i.e., multipath effect, occlusion, etc. In this case, the free-space propagation model is not as suitable as the computational model. Therefore, the study of the implemented communication links in complex environments is needed.
- The optimization of computational power in practical fields. Small mobile devices have weak edge computing power and high energy consumption, which makes it difficult to support low-power and long-time work in the field. In short-range UAV emergency communication, the energy used by artificial intelligence to make predictions may be greater than the energy used during communication. Thus, the low-energy algorithm with the precise result is still a challenging task in UAV communications.
Author Contributions
Funding
Conflicts of Interest
References
- Sodhro, A.H.; Pirbhulal, S.; Luo, Z.; Muhammad, K.; Zahid, N.Z. Toward 6G architecture for energy-efficient communication in IoT-enabled smart automation systems. IEEE Internet Things J. 2020, 8, 5141–5148. [Google Scholar] [CrossRef]
- Almalki, F.A.; Soufiene, B.O.; Alsamhi, S.H.; Sakli, H. A low-cost platform for environmental smart farming monitoring system based on IoT and UAVs. Sustainability 2021, 13, 5908. [Google Scholar] [CrossRef]
- Qi, W.; Li, Q.; Song, Q.; Guo, L.; Jamalipour, A. Extensive edge intelligence for future vehicular networks in 6G. IEEE Wirel. Commun. 2021, 28, 128–135. [Google Scholar] [CrossRef]
- Yang, P.; Xiao, Y.; Xiao, M.; Li, S. 6G wireless communications: Vision and potential techniques. IEEE Netw. 2019, 33, 70–75. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Artificial intelligence-based techniques for emerging robotics communication: A survey and future perspectives. arXiv 2018, arXiv:1804.09671. [Google Scholar]
- Alsamhi, S.H.; Almalki, F.; Ma, O.; Ansari, M.S.; Lee, B. Predictive estimation of optimal signal strength from drones over IoT frameworks in smart cities. IEEE Trans. Mob. Comput. 2021. [Google Scholar] [CrossRef]
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G wireless networks: Vision, requirements, architecture, and key technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, X.; Li, J.; Fang, Z.; Jiang, X.; Huq, K.M.S. LFT-Net: Local Feature Transformer Network for Point Clouds Analysis. IEEE Trans. Intell. Transp. Syst. 2022. [Google Scholar] [CrossRef]
- Yang, H.; Alphones, A.; Xiong, Z.; Niyato, D.; Zhao, J.; Wu, K. Artificial-intelligence-enabled intelligent 6G networks. IEEE Netw. 2020, 34, 272–280. [Google Scholar] [CrossRef]
- Yu, Z.; Gong, Y.; Gong, S.; Guo, Y. Joint task offloading and resource allocation in UAV-enabled mobile edge computing. IEEE Internet Things J. 2020, 7, 3147–3159. [Google Scholar] [CrossRef]
- Huang, M.; Liu, W.; Wang, T.; Liu, A.; Zhang, S. A cloud–MEC collaborative task offloading scheme with service orchestration. IEEE Internet Things J. 2019, 7, 5792–5805. [Google Scholar] [CrossRef]
- Zhang, L.; Ansari, N. Optimizing the operation cost for UAV-aided mobile edge computing. IEEE Trans. Veh. Technol. 2021, 70, 6085–6093. [Google Scholar] [CrossRef]
- Gupta, A.; Sundhan, S.; Gupta, S.K.; Alsamhi, S.H.; Rashid, M. Collaboration of UAV and HetNet for better QoS: A comparative study. Int. J. Veh. Inf. Commun. Syst. 2020, 5, 309–333. [Google Scholar] [CrossRef]
- Chen, C.; Chen, S.; Hu, G.; Chen, B.; Chen, P.; Su, K. An auto-landing strategy based on pan-tilt based visual servoing for unmanned aerial vehicle in GNSS-denied environments. Aerosp. Sci. Technol. 2021, 116, 106891. [Google Scholar] [CrossRef]
- Song, B.D.; Park, K.; Kim, J. Persistent UAV delivery logistics: MILP formulation and efficient heuristic. Comput. Ind. Eng. 2018, 120, 418–428. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. UAV remote sensing for urban vegetation mapping using random forest and texture analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef] [Green Version]
- Faiçal, B.S.; Freitas, H.; Gomes, P.H.; Mano, L.Y.; Pessin, G.; de Carvalho, A.C.; Krishnamachari, B.; Ueyama, J. An adaptive approach for UAV-based pesticide spraying in dynamic environments. Comput. Electron. Agric. 2017, 138, 210–223. [Google Scholar] [CrossRef]
- McRae, J.N.; Gay, C.J.; Nielsen, B.M.; Hunt, A.P. Using an unmanned aircraft system (drone) to conduct a complex high altitude search and rescue operation: A case study. Wilderness Environ. Med. 2019, 30, 287–290. [Google Scholar] [CrossRef] [Green Version]
- Saif, A.; Dimyati, K.B.; Noordin, K.A.B.; Shah, N.S.M.; Alsamhi, S.H.; Abdullah, Q.; Farah, N. Distributed clustering for user devices under unmanned aerial vehicle coverage area during disaster recovery. arXiv 2021, arXiv:2103.07931. [Google Scholar]
- Zhang, S.; Zhang, H.; Song, L. Beyond D2D: Full dimension UAV-to-everything communications in 6G. IEEE Trans. Veh. Technol. 2020, 69, 6592–6602. [Google Scholar] [CrossRef] [Green Version]
- Alsamhi, S.H.; Almalki, F.A.; AL-Dois, H.; Shvetsov, A.V.; Ansari, M.S.; Hawbani, A.; Gupta, S.K.; Lee, B. Multi-Drone Edge Intelligence and SAR Smart Wearable Devices for Emergency Communication. Wirel. Commun. Mob. Comput. 2021, 2021. [Google Scholar] [CrossRef]
- You, C.; Zhang, R. Hybrid offline-online design for UAV-enabled data harvesting in probabilistic LoS channels. IEEE Trans. Wirel. Commun. 2020, 19, 3753–3768. [Google Scholar] [CrossRef] [Green Version]
- Alsamhi, S.H.; Almalki, F.A.; Afghah, F.; Hawbani, A.; Shvetsov, A.V.; Lee, B.; Song, H. Drones’ Edge Intelligence over Smart Environments in B5G: Blockchain and Federated Learning Synergy. IEEE Trans. Green Commun. Netw. 2021, 6, 295–312. [Google Scholar] [CrossRef]
- Chen, P.; Xie, Z.; Fang, Y.; Chen, Z.; Mumtaz, S.; Rodrigues, J.J. Physical-Layer Network Coding: An Efficient Technique for Wireless Communications. IEEE Netw. 2020, 34, 270–276. [Google Scholar] [CrossRef] [Green Version]
- Fang, Y.; Bu, Y.; Chen, P.; Lau, F.C.M.; Otaibi, S.A. Irregular-Mapped Protograph LDPC-Coded Modulation: A Bandwidth-Efficient Solution for 6G-Enabled Mobile Networks. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Dai, L.; Fang, Y.; Yang, Z.; Chen, P.; Li, Y. Protograph LDPC-Coded BICM-ID With Irregular CSK Mapping in Visible Light Communication Systems. IEEE Trans. Veh. Technol. 2021, 70, 11033–11038. [Google Scholar] [CrossRef]
- Dang, S.; Amin, O.; Shihada, B.; Alouini, M.S. What should 6G be? Nat. Electron. 2020, 3, 20–29. [Google Scholar] [CrossRef] [Green Version]
- Fan, L.; Yan, W.; Chen, X.; Chen, Z.; Shi, Q. An energy efficient design for UAV communication with mobile edge computing. China Commun. 2019, 16, 26–36. [Google Scholar]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D placement of an unmanned aerial vehicle base station (UAV-BS) for energy-efficient maximal coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Mozaffari, M.; Saad, W.; Yin, C.; Debbah, M.; Hong, C.S. Caching in the sky: Proactive deployment of cache-enabled unmanned aerial vehicles for optimized quality-of-experience. IEEE J. Sel. Areas Commun. 2017, 35, 1046–1061. [Google Scholar] [CrossRef]
- Yang, Z.; Pan, C.; Wang, K.; Shikh-Bahaei, M. Energy efficient resource allocation in UAV-enabled mobile edge computing networks. IEEE Trans. Wirel. Commun. 2019, 18, 4576–4589. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; He, Q.; Bian, K.; Song, L. Joint trajectory and power optimization for UAV relay networks. IEEE Commun. Lett. 2017, 22, 161–164. [Google Scholar] [CrossRef]
- Li, M.; Cheng, N.; Gao, J.; Wang, Y.; Zhao, L.; Shen, X. Energy-efficient UAV-assisted mobile edge computing: Resource allocation and trajectory optimization. IEEE Trans. Veh. Technol. 2020, 69, 3424–3438. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, Y.; Hu, R.Q.; Qian, Y. Computation rate maximization in UAV-enabled wireless-powered mobile-edge computing systems. IEEE J. Sel. Areas Commun. 2018, 36, 1927–1941. [Google Scholar] [CrossRef] [Green Version]
- Anand, A.; De Veciana, G.; Shakkottai, S. Joint scheduling of URLLC and eMBB traffic in 5G wireless networks. IEEE/ACM Trans. Netw. 2020, 28, 477–490. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Chen, J.; Ji, L.; Feng, Z.; Han, Z.; Chen, Z. Response delay optimization in mobile edge computing enabled UAV swarm. IEEE Trans. Veh. Technol. 2020, 69, 3280–3295. [Google Scholar] [CrossRef]
- Ning, Z.; Huang, J.; Wang, X. Vehicular fog computing: Enabling real-time traffic management for smart cities. IEEE Wirel. Commun. 2019, 26, 87–93. [Google Scholar] [CrossRef]
- Ding, Z.; Xu, J.; Dobre, O.A.; Poor, H.V. Joint power and time allocation for NOMA–MEC offloading. IEEE Trans. Veh. Technol. 2019, 68, 6207–6211. [Google Scholar] [CrossRef] [Green Version]
- Kuang, Z.; Li, L.; Gao, J.; Zhao, L.; Liu, A. Partial offloading scheduling and power allocation for mobile edge computing systems. IEEE Internet Things J. 2019, 6, 6774–6785. [Google Scholar] [CrossRef]
- Mozaffari, M.; Kasgari, A.T.Z.; Saad, W.; Bennis, M.; Debbah, M. Beyond 5G with UAVs: Foundations of a 3D wireless cellular network. IEEE Trans. Wirel. Commun. 2018, 18, 357–372. [Google Scholar] [CrossRef] [Green Version]
- Hu, Q.; Cai, Y.; Yu, G.; Qin, Z.; Zhao, M.; Li, G.Y. Joint offloading and trajectory design for UAV-enabled mobile edge computing systems. IEEE Internet Things J. 2018, 6, 1879–1892. [Google Scholar] [CrossRef]
- Prevost, C.G.; Desbiens, A.; Gagnon, E. Extended Kalman filter for state estimation and trajectory prediction of a moving object detected by an unmanned aerial vehicle. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 1805–1810. [Google Scholar]
- Chen, L.; Chen, P.; Lin, Z. Artificial Intelligence in Education: A Review. IEEE Access 2020, 8, 75264–75278. [Google Scholar] [CrossRef]
- Liu, C.; Yuan, W.; Wei, Z.; Liu, X.; Ng, D.W.K. Location-aware predictive beamforming for UAV communications: A deep learning approach. IEEE Wirel. Commun. Lett. 2020, 10, 668–672. [Google Scholar] [CrossRef]
- Shu, P.; Chen, C.; Chen, B.; Su, K.; Chen, S.; Liu, H.; Huang, F. Trajectory prediction of UAV Based on LSTM. In Proceedings of the 2021 2nd International Conference on Big Data & Artificial Intelligence & Software Engineering (ICBASE), Zhuhai, China, 24–26 September 2021; pp. 448–451. [Google Scholar]
- Alsamhi, S.H.; Rajput, N.S. HAP antenna radiation pattern for providing coverage and service characteristics. In Proceedings of the 2014 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Delhi, India, 24–27 September 2014; pp. 1434–1439. [Google Scholar]
- Friis, H.T. A note on a simple transmission formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Korn, G.A.; Korn, T.M. Appendix B: B9. Plane and spherical trigonometry: Formulas expressed in terms of the haversine function. In Mathematical Handbook for Scientists and Engineers: Definitions, Theorems, and Formulas for Reference and Review, 3rd ed.; Dover Publications: Mineola, NY, USA, 2000; pp. 892–893. [Google Scholar]
- Ketkar, N. Introduction to keras. In Deep Learning with Python; Apress: Berkeley, CA, USA, 2017; pp. 97–111. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware | Parameter |
|---|---|
| Flight Controller | Pixhawk |
| GPS | 10 Hz |
| Maximum speed | 1 m/s |
| Path 1 | Path 2 | Path 3 | Path 4 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Time Delay | Algorithm | MEAN | RMSE | MEAN | RMSE | MEAN | RMSE | MEAN | RMSE |
| no-prediction | 0.4819 | 0.3019 | 0.4970 | 0.3103 | 0.5105 | 0.3197 | 0.5263 | 0.3284 | |
| LSTM | 0.3266 | 0.2624 | 0.3132 | 0.2602 | 0.3228 | 0.2713 | 0.3406 | 0.2883 | |
| Stacked LSTM | 0.6932 | 0.5103 | 0.5646 | 0.4232 | 0.6148 | 0.4420 | 0.7904 | 0.5988 | |
| Bi-LSTM | 0.4407 | 0.3454 | 0.4382 | 0.3239 | 0.4492 | 0.3521 | 0.4185 | 0.3198 | |
| no-prediction | 0.7218 | 0.4513 | 0.7424 | 0.4631 | 0.7637 | 0.4773 | 0.7868 | 0.4899 | |
| LSTM | 0.6214 | 0.5778 | 0.5693 | 0.5594 | 0.5996 | 0.5780 | 0.6515 | 0.6364 | |
| Stacked LSTM | 0.8860 | 0.7675 | 0.8241 | 0.7429 | 0.9067 | 0.7868 | 0.8149 | 0.7396 | |
| Bi-LSTM | 0.7003 | 0.6340 | 0.6629 | 0.6232 | 0.6813 | 0.6317 | 0.7600 | 0.7028 | |
| no-prediction | 0.9606 | 0.5993 | 0.9851 | 0.6139 | 1.0143 | 0.6329 | 1.0447 | 0.6490 | |
| LSTM | 0.6976 | 0.6772 | 0.6630 | 0.6864 | 0.6930 | 0.6887 | 0.7164 | 0.7347 | |
| Stacked LSTM | 0.6451 | 0.5656 | 0.7002 | 0.5747 | 0.6992 | 0.6339 | 0.7362 | 0.5658 | |
| Bi-LSTM | 0.6282 | 0.5674 | 0.5549 | 0.5512 | 0.6156 | 0.5743 | 0.6243 | 0.6257 | |
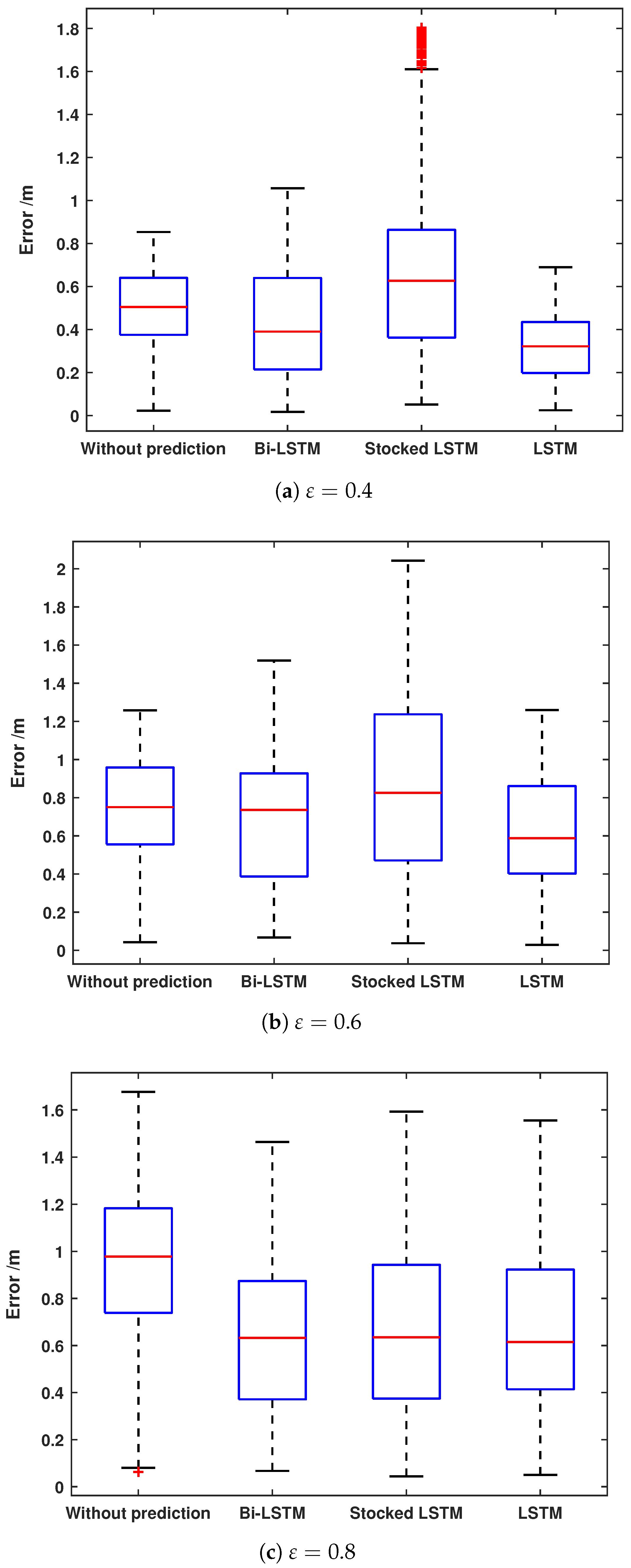
| Time Delay | Algorithm | Median | Upper Quarterback | Lower Quarterback |
|---|---|---|---|---|
| no-prediction | 0.50484 | 0.64050 | 0.37535 | |
| LSTM | 0.32191 | 0.43489 | 0.19843 | |
| Stacked LSTM | 0.62651 | 0.86377 | 0.36274 | |
| Bi-LSTM | 0.39045 | 0.63977 | 0.21414 | |
| no-prediction | 0.75086 | 0.95843 | 0.55587 | |
| LSTM | 0.58762 | 0.86116 | 0.40217 | |
| Stacked LSTM | 0.82599 | 1.23710 | 0.47102 | |
| Bi-LSTM | 0.73654 | 0.92789 | 0.38704 | |
| no-prediction | 0.97781 | 1.18270 | 0.73878 | |
| LSTM | 0.61504 | 0.99237 | 0.41395 | |
| Stacked LSTM | 0.63471 | 0.94299 | 0.37450 | |
| Bi-LSTM | 0.63198 | 087407 | 0.37119 |
| 1000 MHz | |
| 10 dBm | |
| 0 | |
| 0 | |
| Path loss between UAV and ED | [47] |
| −110 dBm | |
| (0,2,0) | |
| The path of the experiment | Path 1 |
| Path 1 | Path 2 | ||||||
| Time Delay | Algorithm | MEAN | RMSE | WMAPE | MEAN | RMSE | WMAPE |
| Prevost et al. [42] | 0.1169 | 0.1803 | 0.55% | 0.1192 | 0.1895 | 0.60% | |
| Shu et al. [45] | 0.2634 | 0.3851 | 1.24% | 0.3302 | 0.4857 | 1.64% | |
| Ours | 0.0890 | 0.1074 | 0.42% | 0.1084 | 0.1400 | 0.54% | |
| Prevost et al. [42] | 0.1722 | 0.2644 | 0.81% | 0.1460 | 0.2259 | 0.67% | |
| Shu et al. [45] | 0.2521 | 0.3025 | 1.19% | 0.2267 | 0.2752 | 1.04% | |
| Ours | 0.1687 | 0.2011 | 0.80% | 0.1382 | 0.1748 | 0.64% | |
| Prevost et al. [42] | 0.2341 | 0.3589 | 1.10% | 0.2229 | 0.3535 | 1.09% | |
| Shu et al. [45] | 0.2167 | 0.2590 | 1.02% | 0.2447 | 0.3466 | 1.20% | |
| Ours | 0.1944 | 0.2564 | 0.92% | 0.1943 | 0.3010 | 0.95% | |
| Path 3 | Path 4 | ||||||
| Time Delay | Algorithm | MEAN | RMSE | WMAPE | MEAN | RMSE | WMAPE |
| Prevost et al. [42] | 0.1257 | 0.1868 | 0.65% | 0.1258 | 0.1844 | 0.65% | |
| Shu et al. [45] | 0.3036 | 0.4460 | 1.56% | 0.3195 | 0.5157 | 1.63% | |
| Ours | 0.0993 | 0.1385 | 0.52% | 0.1049 | 0.1517 | 0.54% | |
| Prevost et al. [42] | 0.1587 | 0.2455 | 0.74% | 0.1683 | 0.2593 | 0.78% | |
| Shu et al. [45] | 0.2462 | 0.2865 | 1.14% | 0.2033 | 0.2485 | 0.95% | |
| Ours | 0.1430 | 0.1801 | 0.66% | 0.1614 | 0.2102 | 0.75% | |
| Prevost et al. [42] | 0.2613 | 0.3861 | 1.37% | 0.2500 | 0.3651 | 1.29% | |
| Shu et al. [45] | 0.2978 | 0.4502 | 1.56% | 0.2891 | 0.4494 | 1.49% | |
| Ours | 0.2053 | 0.3095 | 1.08% | 0.2231 | 0.3343 | 1.15% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Xiang, J.; Ye, Z.; Yan, W.; Wang, S.; Wang, Z.; Chen, P.; Xiao, M. Deep Learning-Based Energy Optimization for Edge Device in UAV-Aided Communications. Drones 2022, 6, 139. https://doi.org/10.3390/drones6060139
Chen C, Xiang J, Ye Z, Yan W, Wang S, Wang Z, Chen P, Xiao M. Deep Learning-Based Energy Optimization for Edge Device in UAV-Aided Communications. Drones. 2022; 6(6):139. https://doi.org/10.3390/drones6060139
Chicago/Turabian StyleChen, Chengbin, Jin Xiang, Zhuoya Ye, Wanyi Yan, Suiling Wang, Zhensheng Wang, Pingping Chen, and Min Xiao. 2022. "Deep Learning-Based Energy Optimization for Edge Device in UAV-Aided Communications" Drones 6, no. 6: 139. https://doi.org/10.3390/drones6060139
APA StyleChen, C., Xiang, J., Ye, Z., Yan, W., Wang, S., Wang, Z., Chen, P., & Xiao, M. (2022). Deep Learning-Based Energy Optimization for Edge Device in UAV-Aided Communications. Drones, 6(6), 139. https://doi.org/10.3390/drones6060139