1. Introduction
In stabilizing a quadrotor, feedback linearization is favored for its unique character in linearizing the nonlinear system [
1,
2,
3,
4,
5]; several degrees of freedom can be subsequently controlled independently by this method. These degrees of freedom can be selected as attitude and altitude [
4,
6,
7], position and yaw angle [
8,
9,
10,
11], attitude only [
12], etc. The reason for not assigning all six degrees of freedom as independent controlled variables is that the number of inputs in a conventional quadrotor is four, marking the maximum number of degrees of freedom to be independently controlled [
13] less than the entire degrees of freedom.
Typical feedback linearization requires an invertible decoupling matrix [
14,
15], which is always satisfied for a quadrotor with attitude–altitude independent output choice, while the position-yaw independent output choice witnesses a singular decoupling matrix for some attitudes [
11,
16].
On the other hand, some studies stabilize Ryll’s tilt-rotor [
17,
18,
19], a novel UAV with eight inputs, by controlling all degrees of freedom independently and simultaneously. The relevant decoupling matrices with six inputs and eight inputs have been proven invertible, marking the feasibility of the application of feedback linearization.
These controllers, however, can command the tilting angles of the tilt-rotor to change over-intensively [
17,
20,
21], not expected in application.
With this concern, our previous research sets the magnitudes of the thrusts the only four inputs assigned by the subsequent united control rule [
22]. The four tilting angles are defined in gait plan beforehand, which is totally not influenced by the control rule.
Undeniably, the maximum number of degrees of freedom that can be independently controlled decreases to four, less than the number of the entire degrees of freedom (six); attitude and altitude are selected as the only degrees of freedom to be directly stabilized. The remaining degrees of freedom, X and Y in position, are tracked by adjusting the attitude properly based on a modified attitude-position decoupler [
23]. While the conventional attitude-position decoupler [
7,
24,
25,
26] for a quadrotor no longer works for a tilt-rotor.
Note that the relevant decoupling matrix can be singular for some attitudes while adopting some gaits [
22]. Various animal-inspired gaits are subsequently analyzed and modified to avert a non-invertible decoupling matrix by scaling [
27,
28,
29], which has been proven to be a valid approach to modify a gait. The modified gaits show wider regions of the acceptable attitudes in the roll-pitch diagram, indicating the enhanced robustness.
However, no research guides the gait plan, considering the robustness, thus far, without adopting an existing gait (e.g., animal-inspired gait [
23,
27]). Indeed, deducing the explicit relationship between the attitude and the singularity of the decoupling matrix can be cumbersome since they are tangled in a highly nonlinear way.
This article articulates the influence of the attitude to the singularity of the decoupling matrix by little attitude approximation. The deduced gaits are robust to the change of the attitude; restricted disturbances in attitude will not change the singularity of the decoupling matrix while adopting the deduced gaits. The resulting acceptable gaits lie on the four-dimensional gait surface.
To avoid the discontinuous change in the tilting angles, the gait is required to move continuously along all the four dimensions of the four-dimensional gait surface. The Two Color Map Theorem is subsequently developed to further guide the gait plan to design a continuous gait, which is inspired by the well-known Four Color Map Theorem [
30,
31].
The acceptable attitudes of four typical gaits on the different parts of the four-dimensional gait surface are analyzed in the roll-pitch diagram. The results are compared with the relevant biased gaits, locating outside the four-dimensional gait surfaces. It shows that the robustness of the gait is improved if the gait is planned on the four-dimensional gait surface.
The rest of this article is organized as follows.
Section 2 reviews the necessary condition to receive the invertible decoupling matrix for our tilt-rotor.
Section 3 thoroughly deduces the acceptable gaits considering the robustness. The resulting four-dimensional gait surfaces are also visualized in the same section.
Section 4 proposes the Two Color Map Theorem to guide a continuous gait plan. The verification of the robustness of the proposed gaits is analyzed in the roll-pitch diagram in
Section 5. Finally,
Section 6 addresses the conclusions and discussions.
2. Invertible Decoupling Matrix: Necessary Condition
The target tilt-rotor analyzed in this research is sketched in
Figure 1 [
22]. This structure was initially put forward by Ryll [
13].
The frames introduced in the dynamics of this tilt-rotor are earth frame , body-fixed frame , and four rotor frames , each of which is fixed on the tilt motor mounted at the end of each arm. Rotor 1 and 3 are assumed to rotate clockwise along and . While rotor 2 and 4 are assumed to rotate counterclockwise along and .
As can be seen in
Figure 1, the thrusts can be assigned to the vector along the directions on the highlighted yellow planes (tilting). This is completed by changing the tilting angles marked by
in
Figure 1.
Ryll proved that the decoupling matrix in feedback linearization, programmed to independently stabilize each degree of freedom, is invertible [
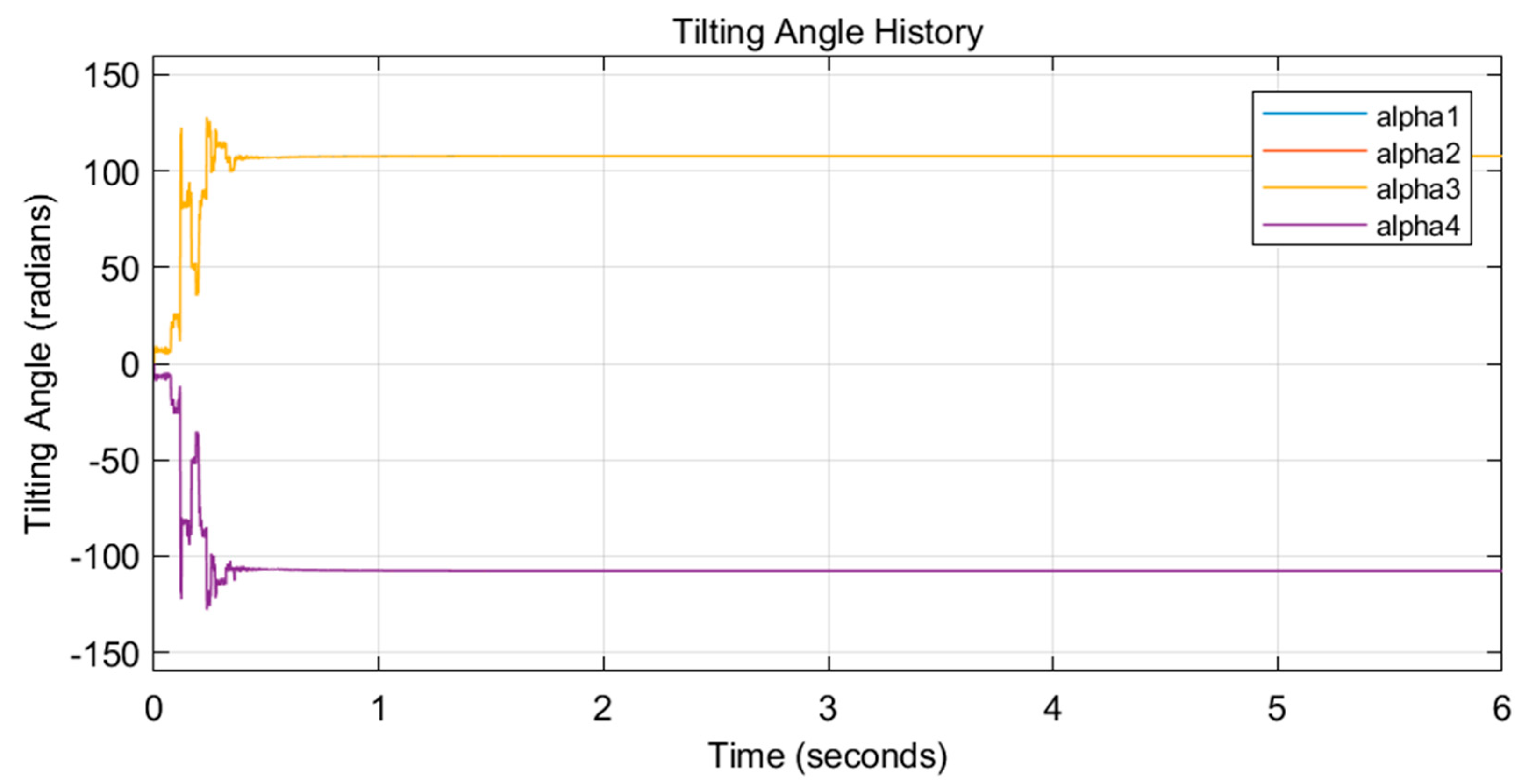
13]. This result guarantees that the dynamic inversion can be conducted throughout the entire flight for any attitude. This approach, however, introduces over-intensive changes in the tilting angles, a typical result of which can be found in
Figure 2 [
22]. Given the initial thrusts insufficient to compensate the gravity, the tilt-rotor successfully hovers relying on the united control rule with eight inputs (over-actuated control). While the tilting angles changes over-intensively.
To overcome this obstacle, an alternative selection of the independent controlled degrees of freedom, attitude and altitude, is given [
22] while utilizing the magnitudes as the only inputs. Define the combination of the tilting angle (
) as gait. The tilting angles (
) are specified with time beforehand as a separate process (gait plan), not influenced by the subsequent feedback linearization. The only inputs resulted from a united control rule are the magnitudes of the four thrusts.
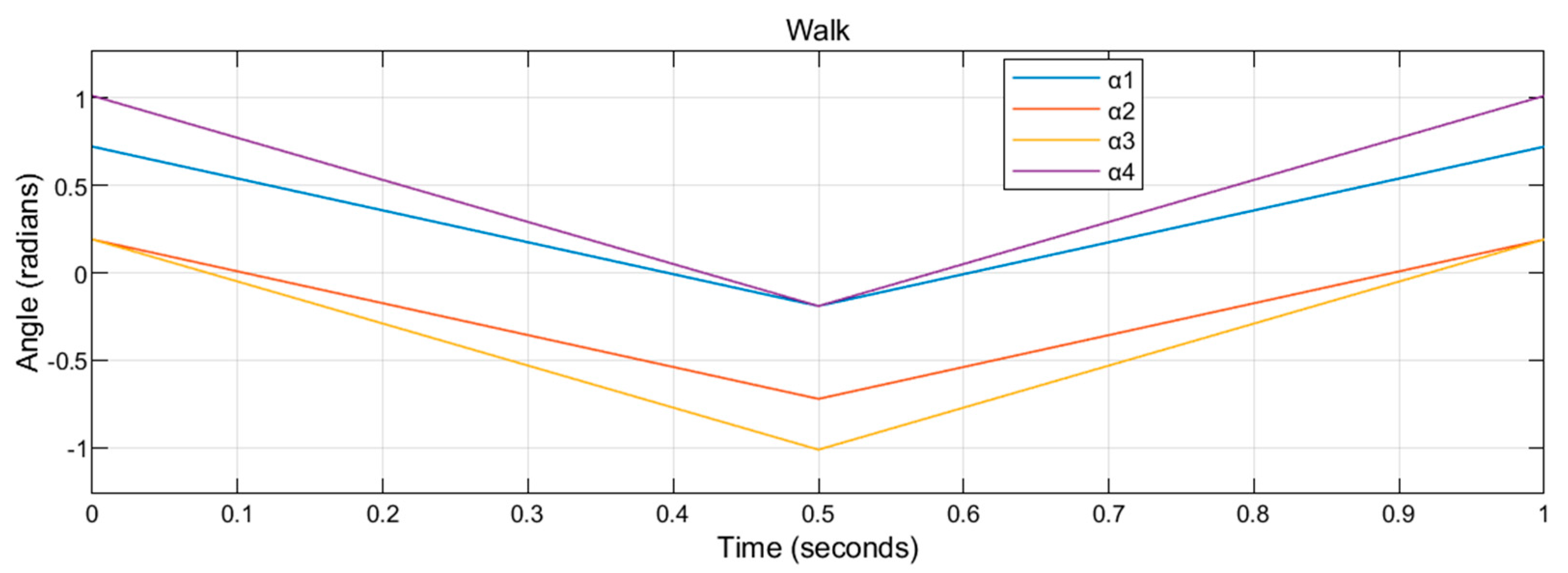
For example, our previous research [
27] planned an animal-inspired gait (inspired by cat walk),
Figure 3, where the period is set as 1 s. The tilting angles changes periodically during the whole flight.
Interestingly, this selection of independent controlled variables (attitude and altitude) introduces no singular decoupling matrix in a conventional quadrotor, which, actually, can be regarded as a special case for a tilt-rotor, e.g., . However, it introduces the singular decoupling matrix in a tilt-rotor for some tilting angles given some attitudes.
Specifically, the necessary condition [
22] to receive an invertible decoupling matrix in our tilt-rotor is given by
where
and
,
,
, (
),
and
are roll angle and pitch angle, respectively.
Since the attitude (roll and pitch) is not predictable in the gait plan process, the left side of Formula (1) cannot be achieved in the gait plan. The unknown
and
on the left side of Formula 1 make it difficult to plan a gait while satisfying this condition. Considering that roll angle and pitch angle are small in typical flights, our previous research [
23] makes zero attitude approximation to Formula (1): substituting
and
into Formula (1) yields
Formula (2) contains the tilting angles only, making the verification in the gait plan process possible. Several animal-inspired gaits were then evaluated by Formula (2), and received satisfying tracking result [
27].
This result (Formula (2)) from zero attitude approximation, however, discards the influence of the attitude. The effect of the disturbance of roll angle and pitch angle, which may violate Formula (1) cannot be traced from Formula (2).
From this point, though Formula (2) may be useful to determine whether a gait is feasible, it is not suitable to design a “robust gait” from nothing. A robust gait here is a time-specified that guarantees the left side of Formula (1) is nonzero, even with the introduction of small disturbances (away from zero) in attitude (roll angle and pitch angle).
A novel method of planning robust gaits is specified in the next section.
3. Four-Dimensional Gait Surface
Instead of utilizing zero attitude approximation, make the following near zero attituded approximation:
,
. Substituting this near zero attitude approximation into Formula (1) yields
where
To diminish the disturbance of the attitude, roll angle and pitch angle on the left side of Formula (3), both and are set zero.
Further, to satisfy Formula (3), is required to be non-zero.
In conclusion, the necessary condition to receive an invertible gait considering robustness is
Since , , and are highly nonlinear, the numerical results will be calculated only.
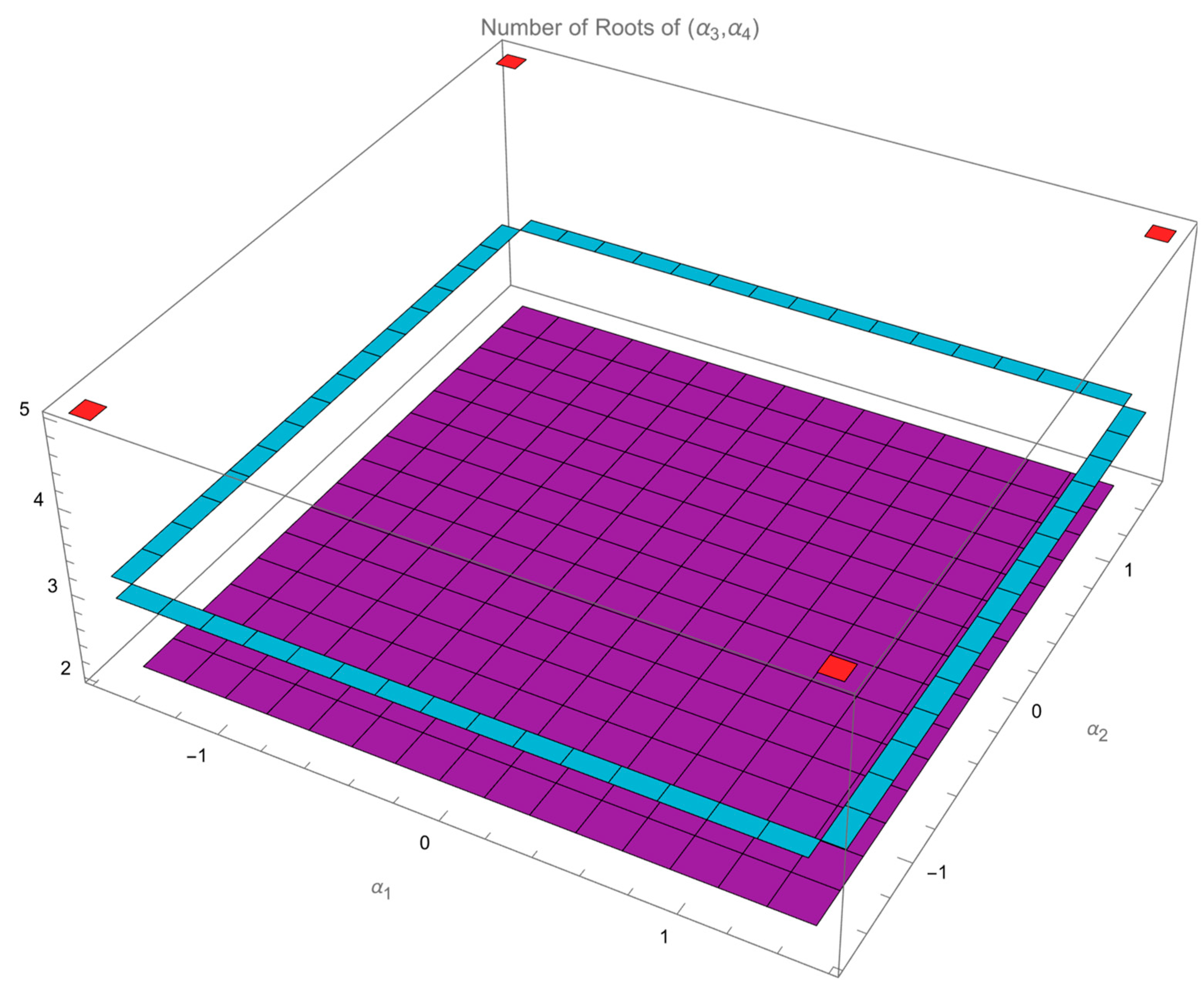
Evenly dividing the range into 16 pieces generates 17 grids, . Only these on the grids are to be calculated. Similarly, only are to be calculated. With this configuration, there are altogether on the grids.
For each , the corresponding within the range , are found based on Equations (7) and (8) with the aid of Mathematica. The solver used is NSolve (Precision Set = 10).
Figure 4 plots the number of the roots of
for each given
on the grids.
It can be seen that the number of roots of is 2 in the middle, . Each corner, , returns 5 roots to the corresponding . Each of the rest on the side returns 3 roots of .
Discarding on the side and the corner, we only discuss the in the middle, where there are 2 roots for each given .
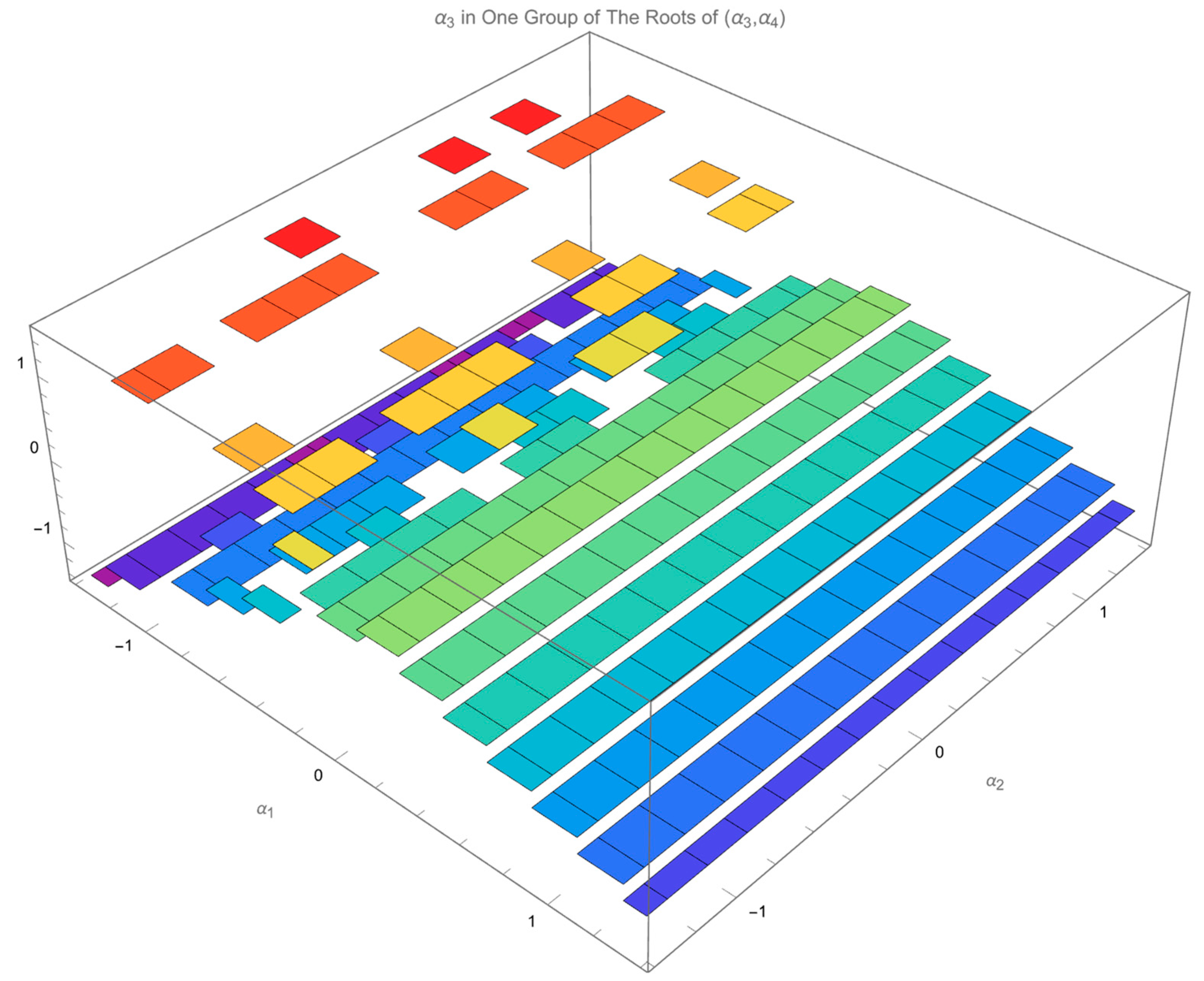
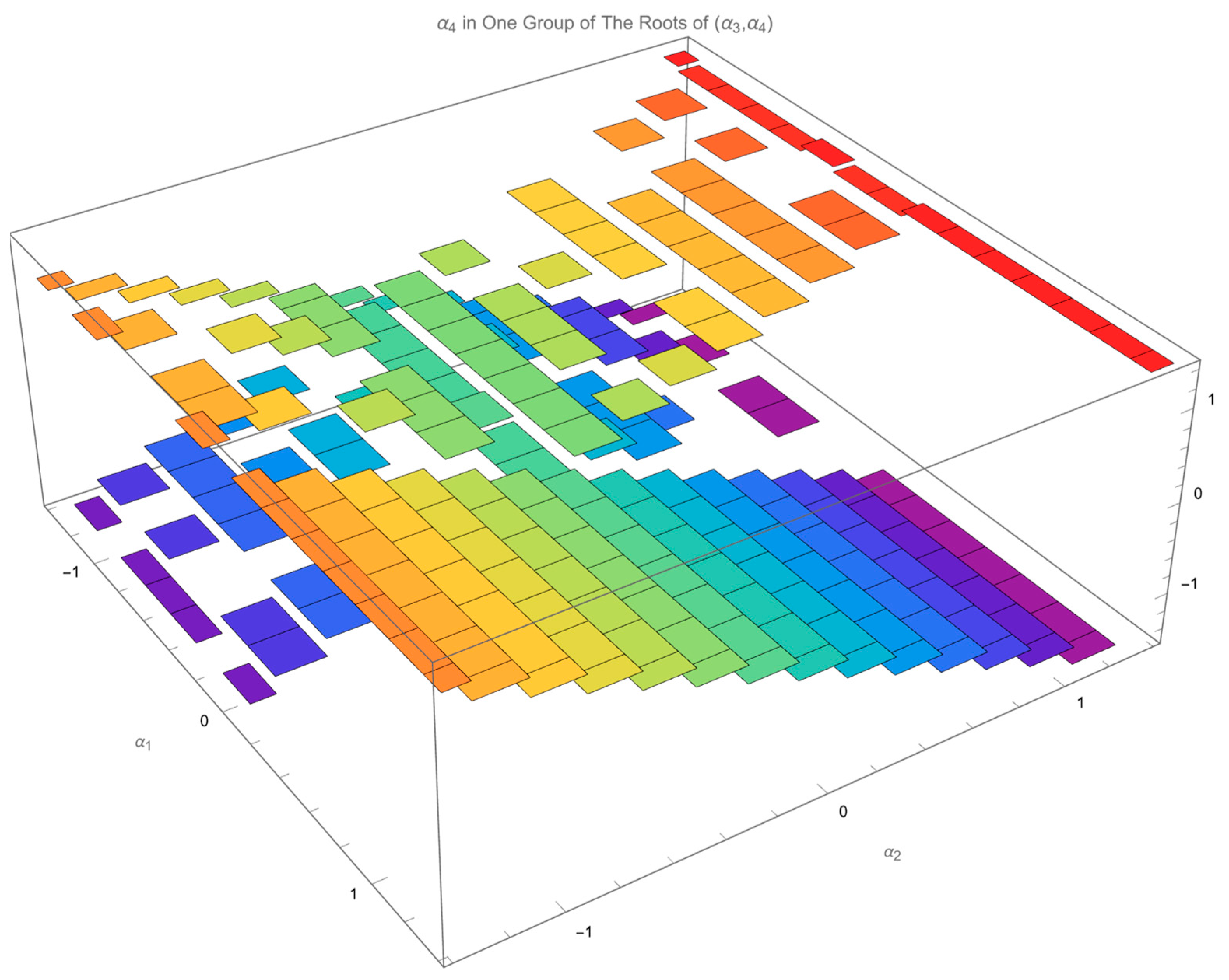
Figure 5 and
Figure 6 plots
and
, respectively, in one of two groups of the roots of
.
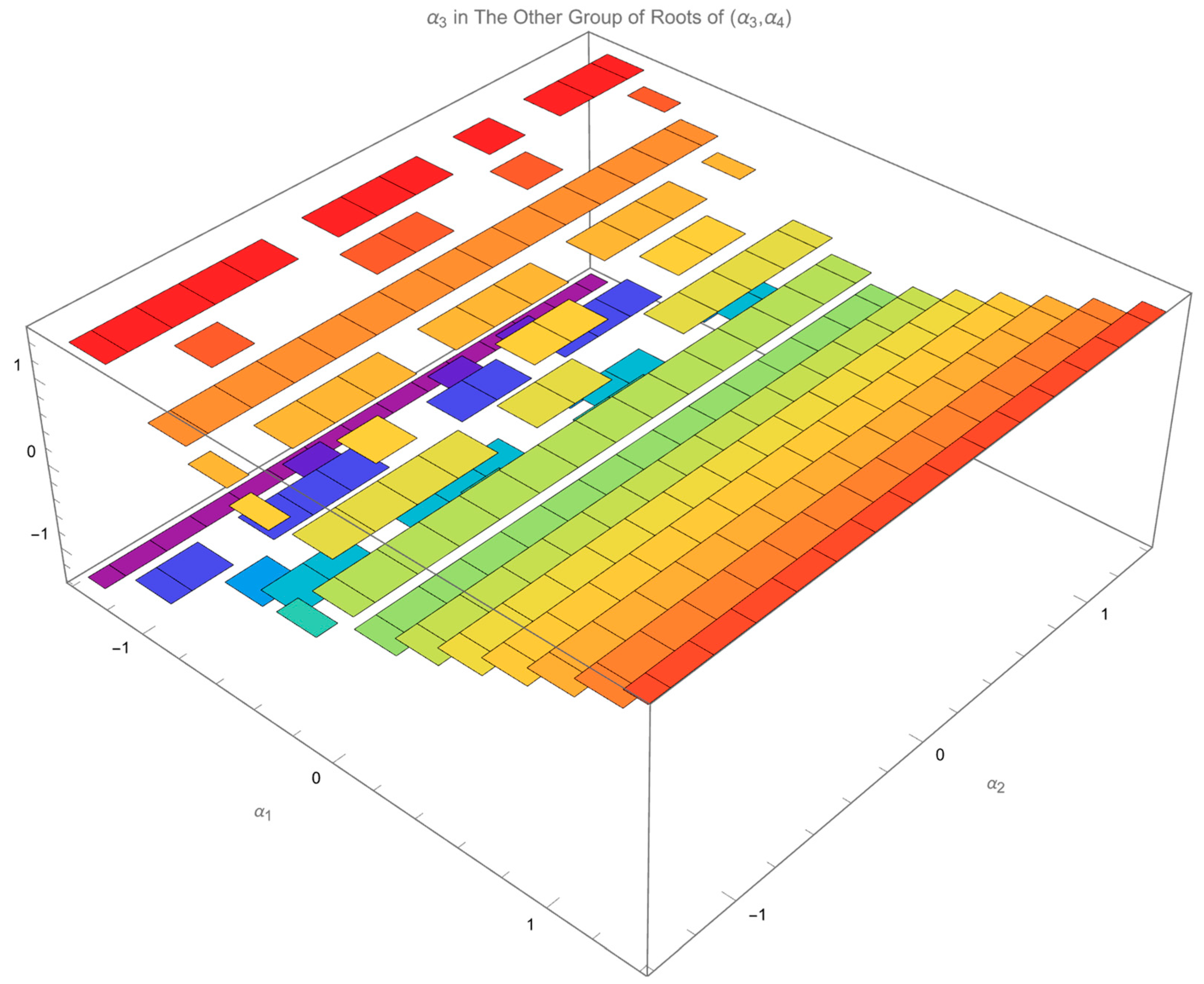
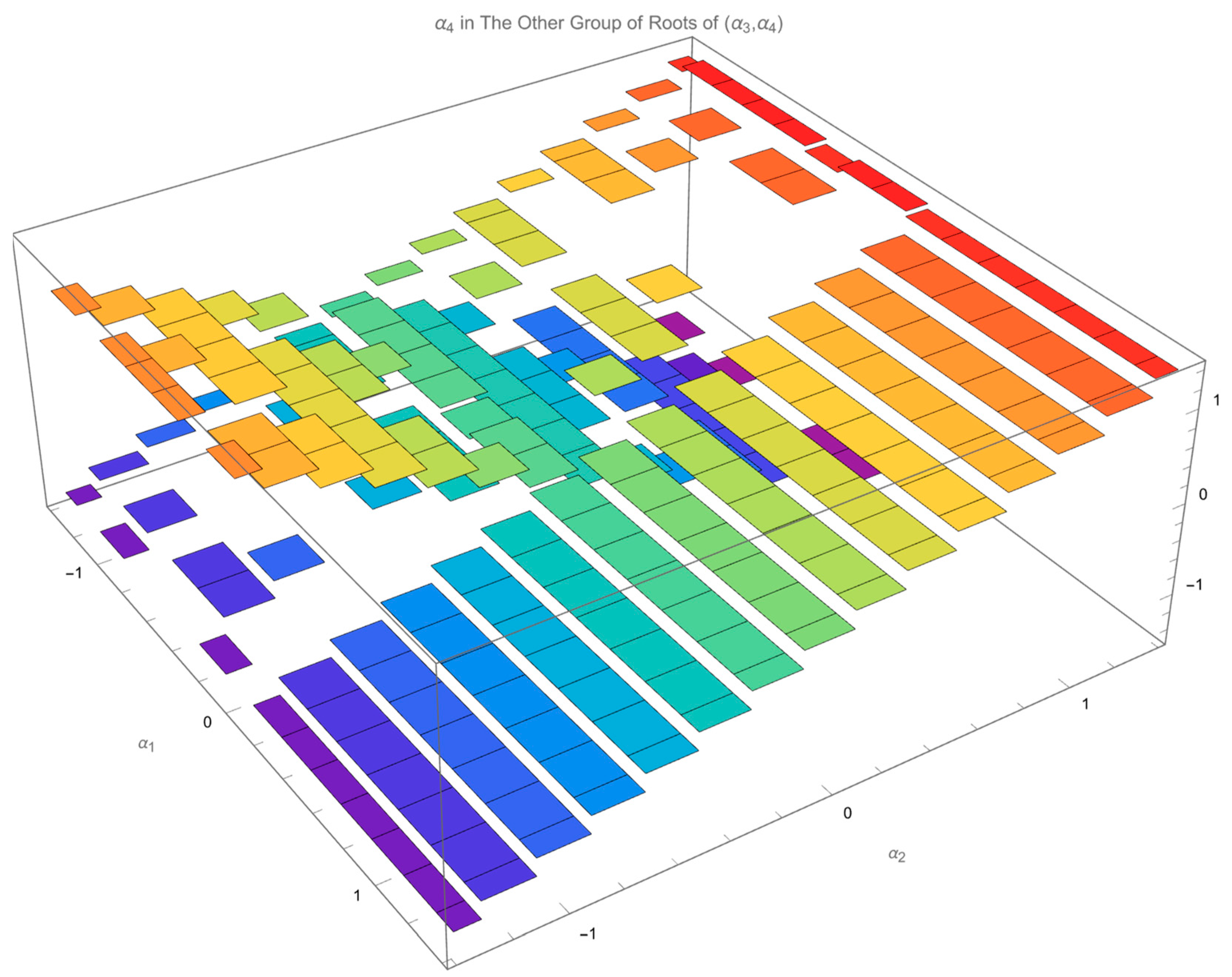
Figure 7 and
Figure 8 plots
and
, respectively, in the other root of
.
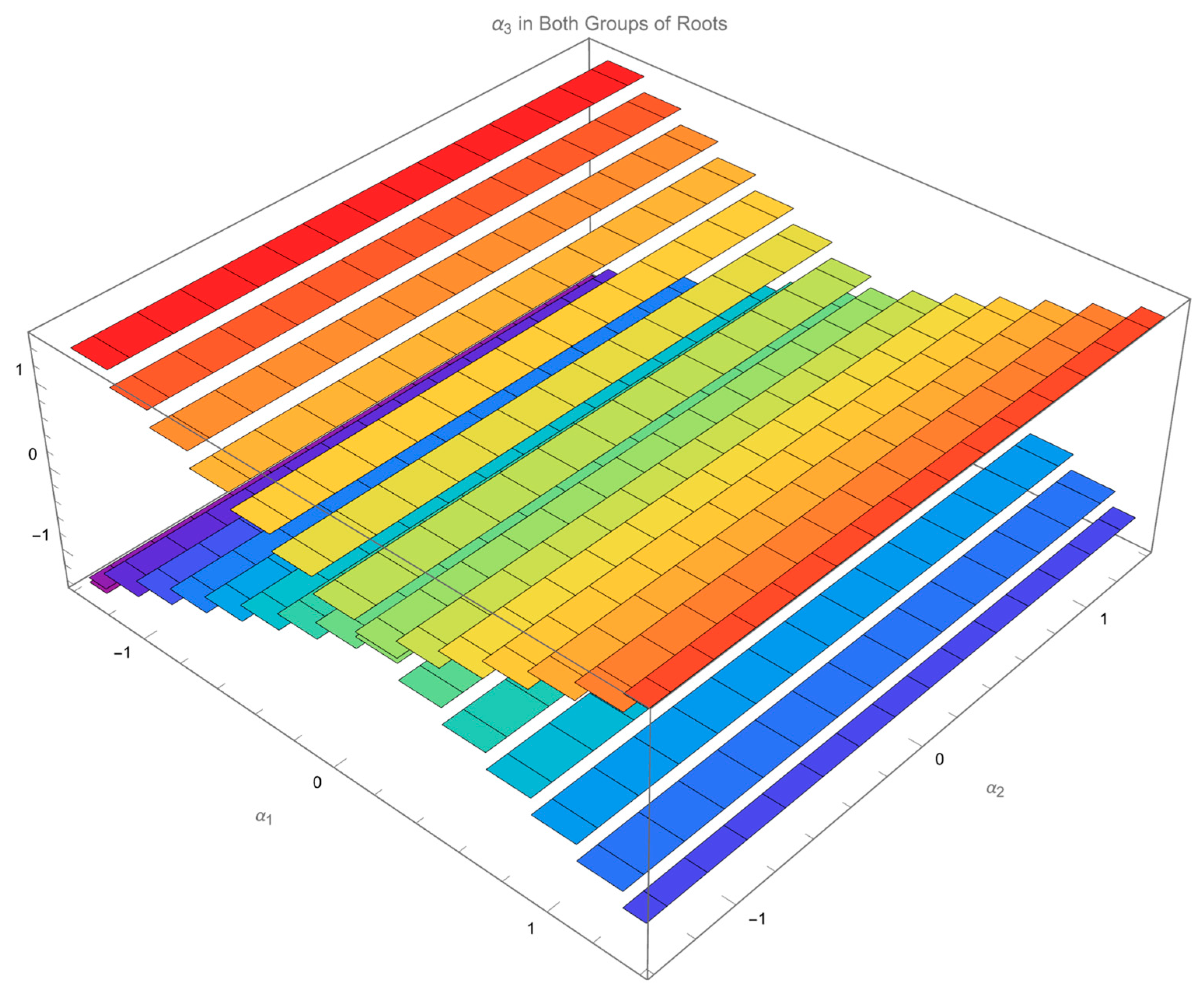
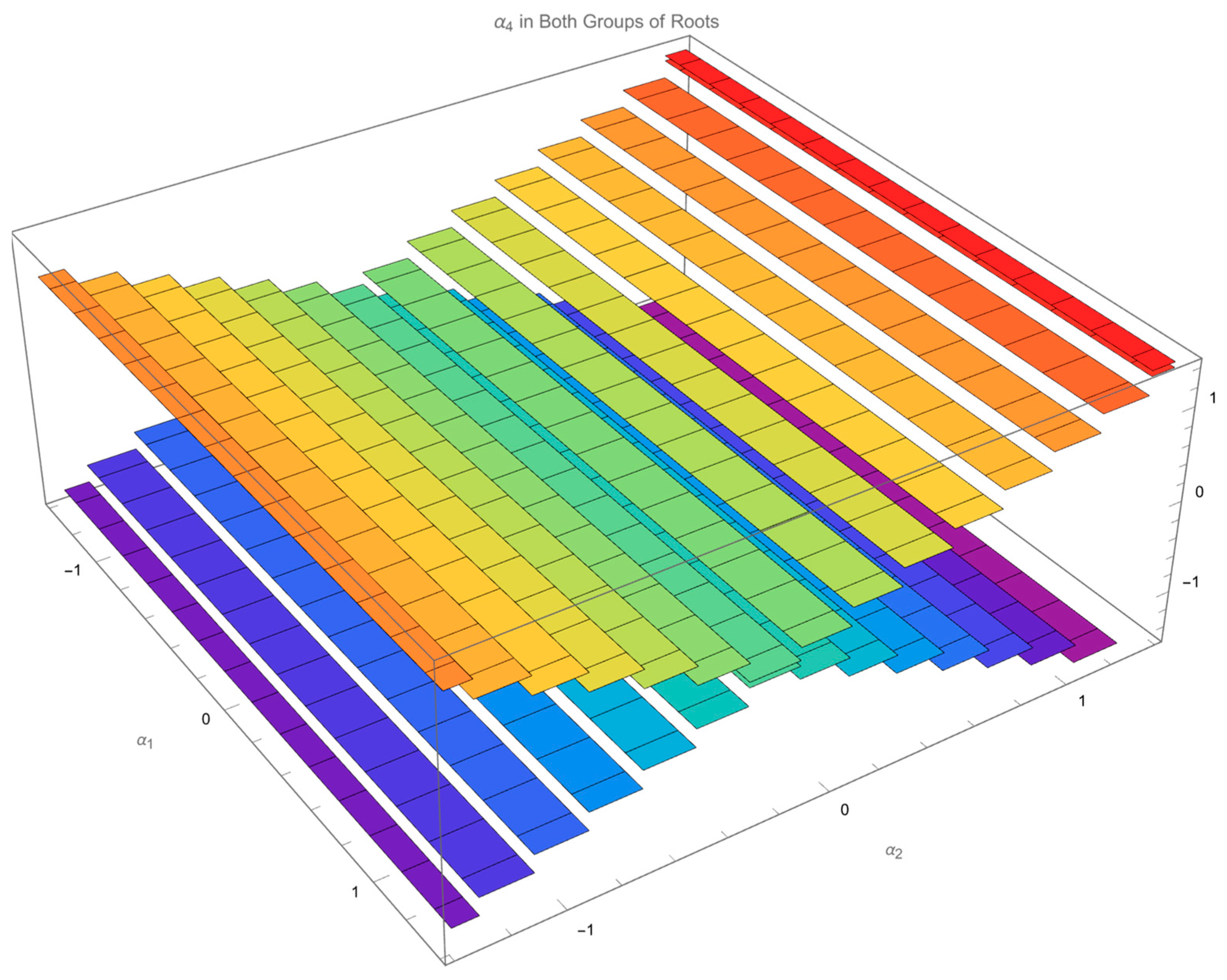
Show two values of
in the same figure (
Figure 9). Show two values of
in the same figure (
Figure 10).
Although the regularity of the distribution of
in either root of
,
Figure 5 and
Figure 7, can hardly be tracked,
Figure 9 shows that both
lie on the two planes. One plane increases
when
increases. Define this plane “
” plane. The other plane decreases
when
increases. Define this plane “
” plane.
Similarly,
Figure 10 shows that both
also lie on another two planes. One plane increases
when
increases. Define this plane “
” plane. The other plane decreases
when
increases. Define this plane “
” plane.
With these definitions, the roots of can be classified by the mark . For example, represents the root of , whose lies on “” plane and lies on “” plane.
Observing
Figure 3,
Figure 4,
Figure 5 and
Figure 6, there are only 7 categories of the roots of
. They are
,
,
,
,
,
,
. “
” in either of planes represents that the intersection of the relevant “
” plane and “
” plane.
Note that no roots of belong to or .
These definitions will facilitate the discussions on the Two Color Map Theorem, detailed in the next section.
Observing Formula (6), we assert that is continuous, given , , , and are continuous.
Proposition 1. Given and
, the necessary condition to receive an invertible decoupling matrix isor Proof of Proposition 1. Considering that is continuous, the rebuttal method yields this result. □
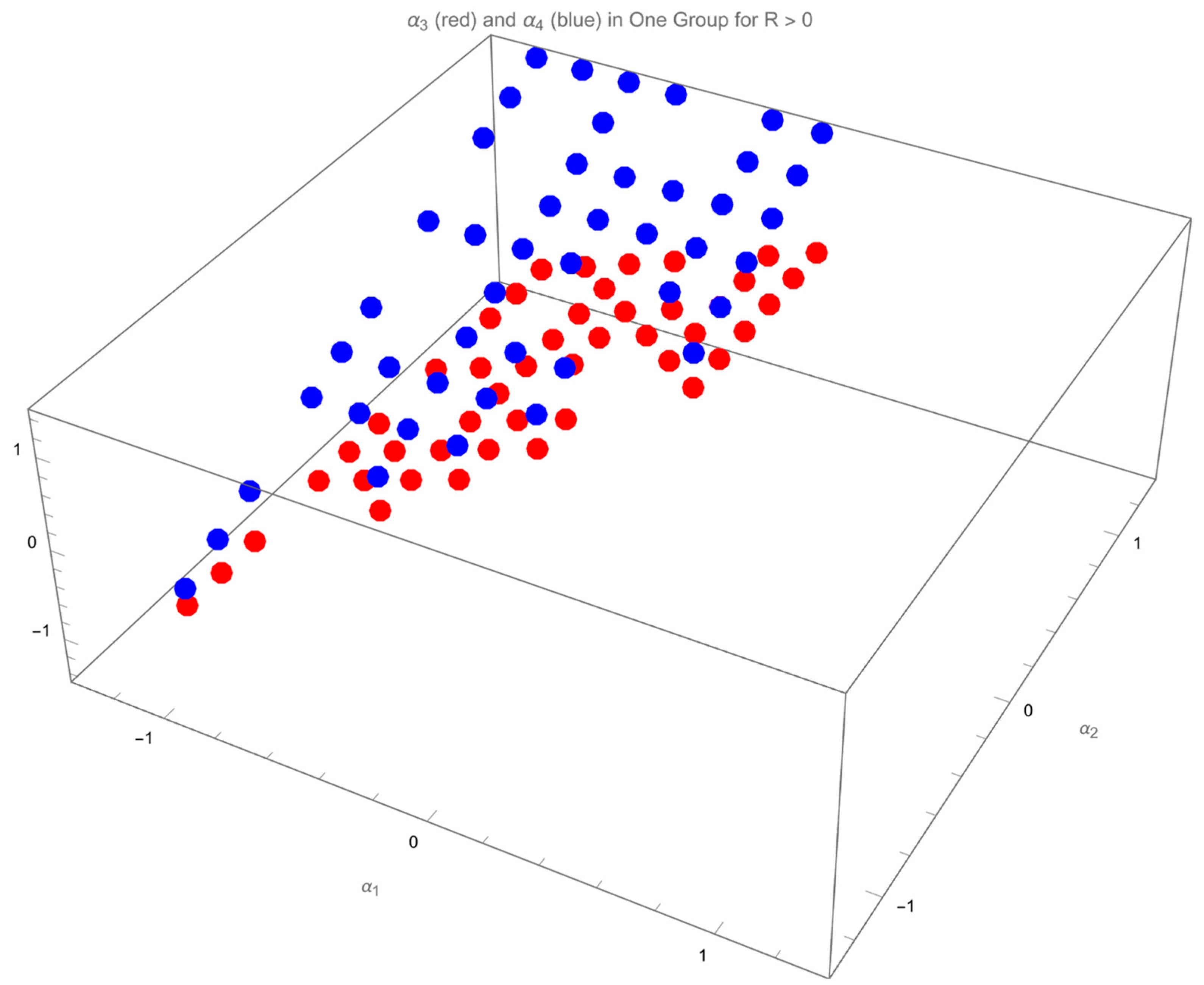
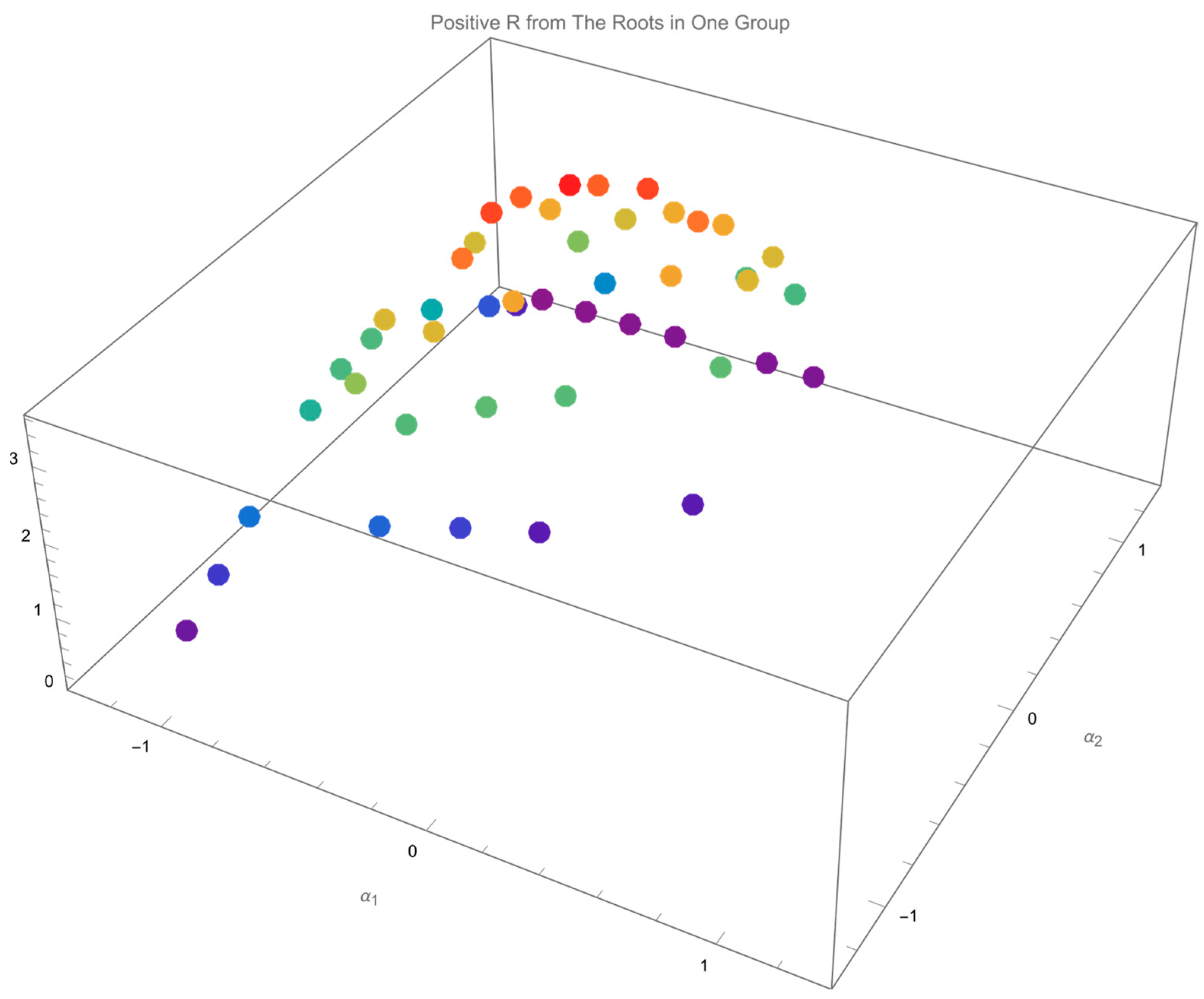
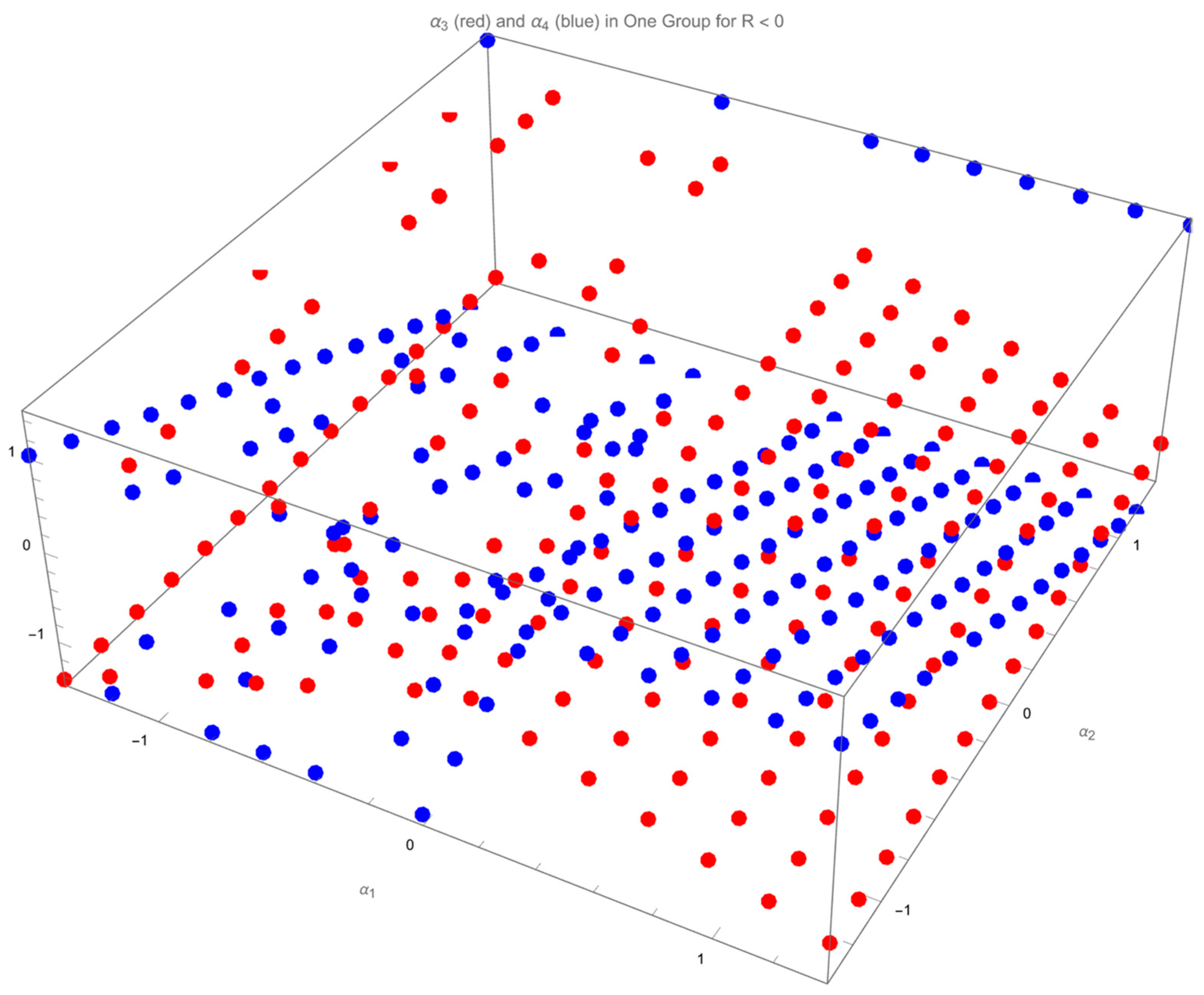
Based on Proposition 1, the roots of previously found are further classified into the ones receiving positive and the ones receiving negative .
Figure 11 plots the roots of
in
Figure 5 and
Figure 6 receiving positive
with
in red and
in blue. The value of the relevant
is illustrated in
Figure 12.
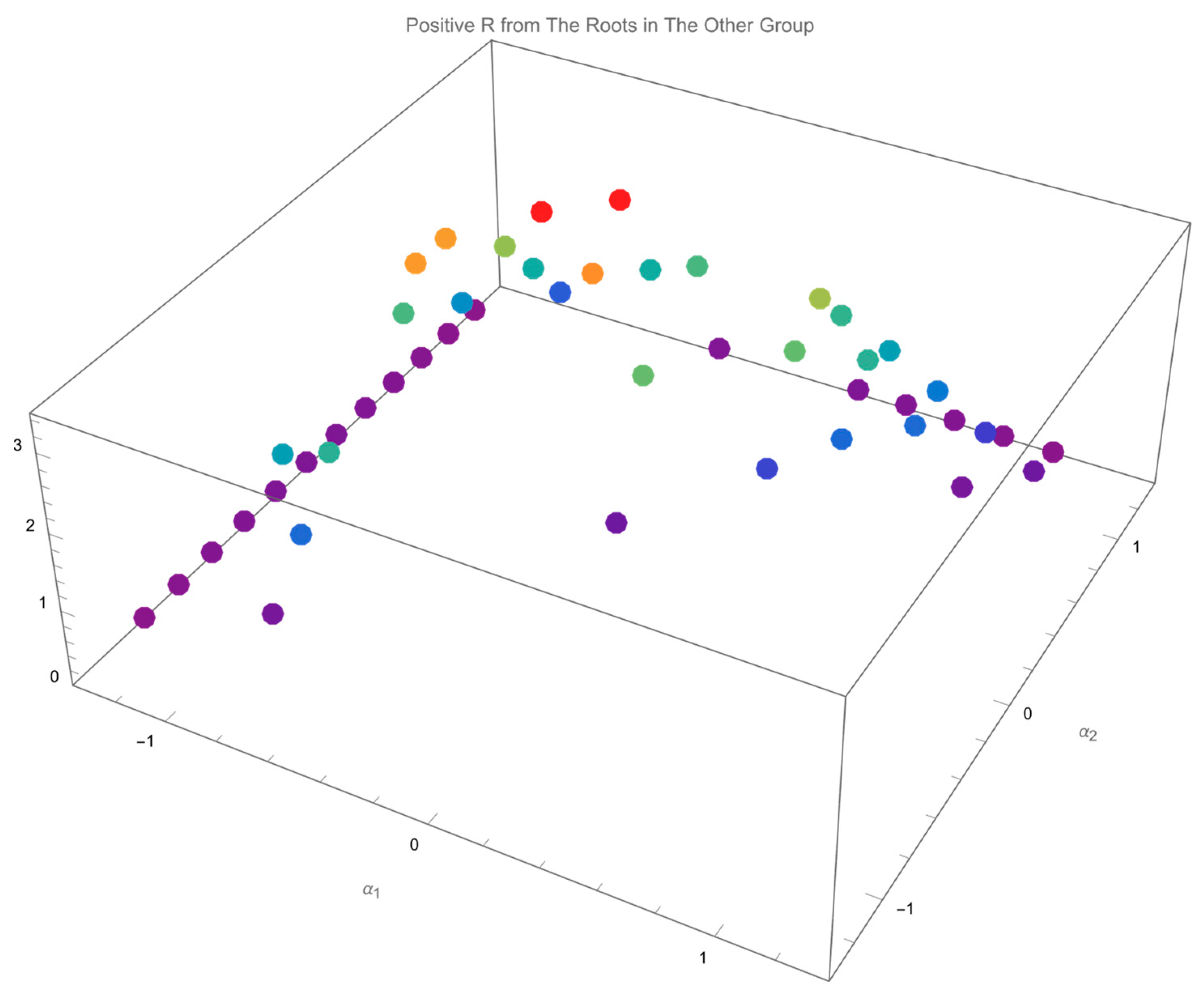
Figure 13 plots the roots of
in
Figure 7 and
Figure 8 receiving positive
with
in red and
in blue. The value of the relevant
is illustrated in
Figure 14.
Note that both roots of
receiving positive
,
Figure 11 and
Figure 13, belong to
, and
types.
Further, check the corresponding
of each blue/red points in
Figure 11 and
Figure 13. It can be found that a triangular area in the
plane is occupied by the corresponding
in both figures: the projection of these applicable
in both roots fully occupy the triangular area of
without overlapping, indicating that there is only one root of
meeting
for each
in the triangular area. This triangular area is governed by three vertices:
,
,
.
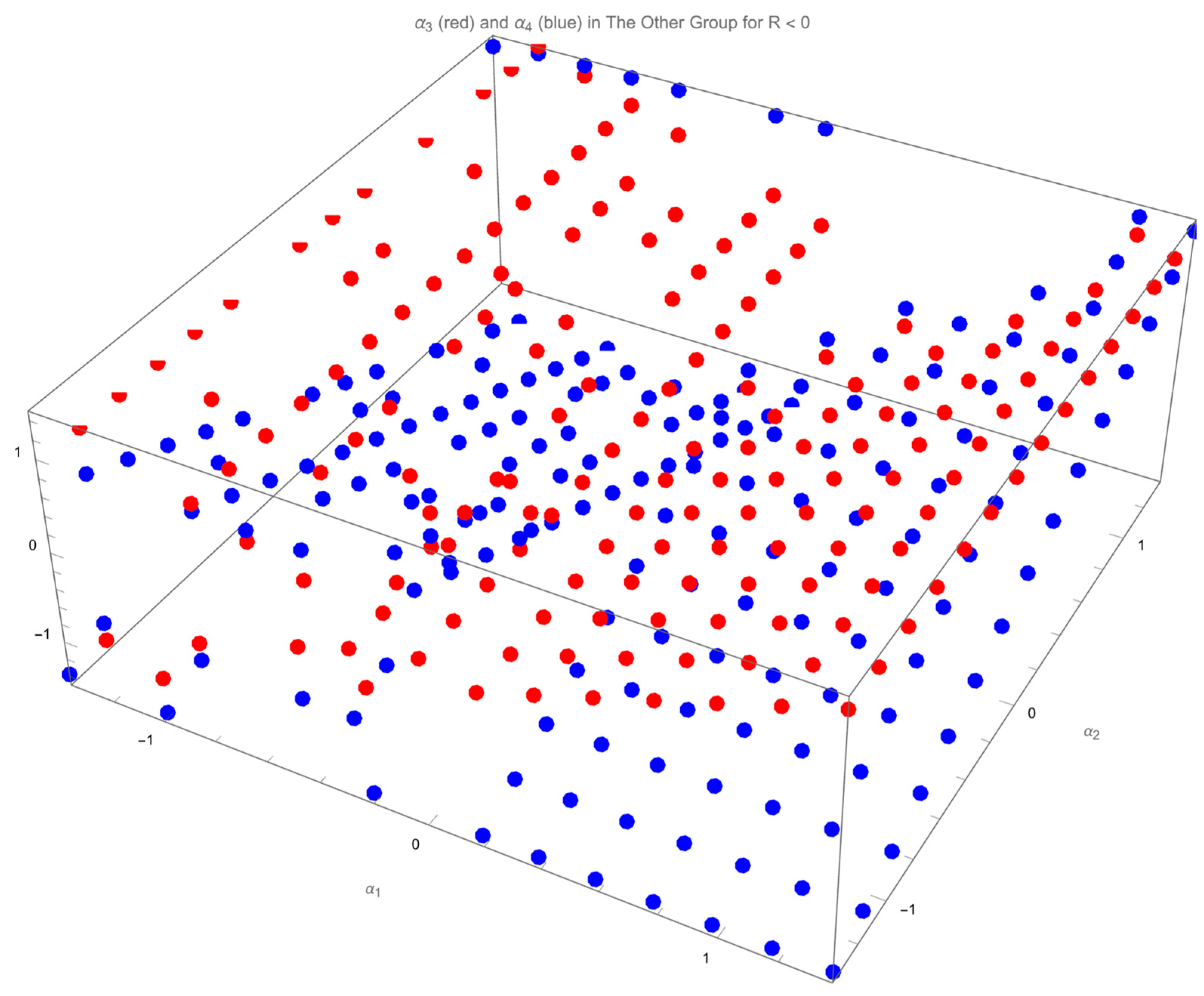
Similarly, the distributions of both roots of
receiving negative
are plotted in
Figure 15 and
Figure 16 with
in red and
in blue.
Both roots of
receiving negative
,
Figure 15 and
Figure 16, covers all seven types:
,
,
,
,
,
,
.
It can be found that for a
, there can be one or two roots of
in
Figure 15 and
Figure 16. In other words, the number of the roots of
receiving negative
is 1 or 2. This research will focus only on parts of these gaits, receiving negative
,
of which will be detailed later in
Section 4.
Thus far, all the satisfying the necessary condition to receive an invertible gait, Formulas (7)–(9) on the four-dimensional gait surface has been classified.
One may plan a gait by varying continuously and recording the corresponding . The resulting is then taken as a gait. This pattern works in the case .
While two obstacles may hinder the application of this pattern when . Firstly, there are the regions of returning two roots to when ; determining the proper root, , for these is necessary. Secondly, varying continuously does not necessarily guarantee that is varying continuously. Ironically, one of the advantages of the gait plan is the continuous change in the tilting angles.
With these concerns, a theory helping select the proper for every given is demanded to receive a continuous gait (First Class Continuous Gait) when .
Definition 1. (First Class Continuous Gait)
A gait is a First Class Continuous Gait if and only if In other words, a gait belongs to First Class Continuous Gait if each tilting angle of this gait is continuous.
A complete exploration of all First Class Continuous Gait on the four-dimensional gait surface is beyond the scope of this research. Instead, we only analyze parts of the First Class Continuous Gait that meet the following condition (Second Class Continuous Gait).
Definition 2. (Second Class Continuous Gait)
Given and at time t, denote and on the Four-dimensional Gait Surface as and , respectively. A gait is a Second Class Continuous Gait if and only if , all the following conditions are satisfied. In plain words, these conditions define the directions of the while the consequent and are required to be continuous. Without further specifications, the “continuous gait” in the rest of this article refers to second class continuous gait.
As mentioned, designing a gait by varying and , obeying Point 1–4 in the definition of Second Class Continuous Gait, and recording the corresponding and , on the Four-dimensional Gait Surface, without a rule may result in a gait violating Point 5.
The Two Color Map Theorem in the next section instructs the choice of these corresponding and to guarantee Point 5.
4. Two Color Map Theorem
The continuous gait is guaranteed by a sophisticated -picking theorem, Two Color Map Theorem. It is an augmented rule for varying while . Without specification, the region in the rest of this section represents the region of with negative
Recalling receiving , there are altogether seven types of in this case: , , , , , , .
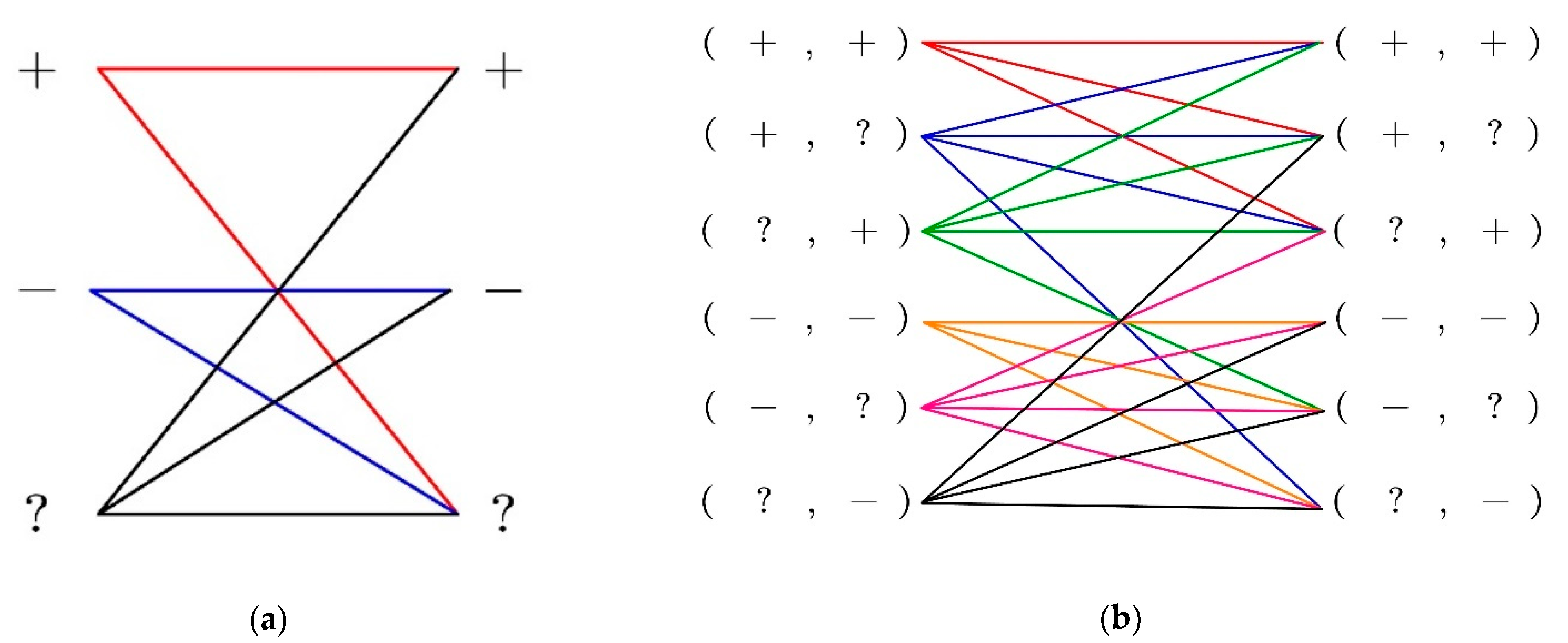
Notice that “” plane and “” plane of intersects at “”, which is a line. In addition, “” plane and “” plane of intersects at a line marked by “”. is not allowed to move from “” to “” or to move from “” to “”. Both cases will introduce the discontinuous change of . Similarly, is not allowed to move from “” to “” or to move from “” to “”. Both cases will introduce the discontinuous change of .
To change the plane, the points on the intersecting lines “” of the two planes, “” and “”, is required to be an intermediate state. For example, the relevant changes from “” to “” to “” and from “” to “” to “” are both continuous.
The allowed types for two adjacent
or
are paired in
Figure 17a. There are three types of
: locating on “
” surface, locating on “
” surface, and locating on the intersection of two planes (marked as “
”).
is not allowed to change the plane while
is varying continuously. Thus,
, lying on “
” plane is supposed to remain on “
” plane or move to the intersection of two planes, which is “
”. Similarly,
, lying on “
” plane is supposed to remain on “
” plane or move to the intersection of two planes, which is “
”. Specially,
, lying on “
” is allowed to move to “
” plane, to “
” plane, or to another “
”. Obviously, the rule for
is identical to the one for
.
The allowed types for two adjacent
are paired in
Figure 17b where the case
is omitted since it accommodates all types of adjacent roots. The first element in the plane type of
represents the type of the plane on which
lies. The pairing rule for the first element follows
Figure 17a. The second element in the plane type of
represents the type of the plane on which
lies. The pairing rule for the second element also follows
Figure 17a.
The allowed adjacent roots and root pairs.
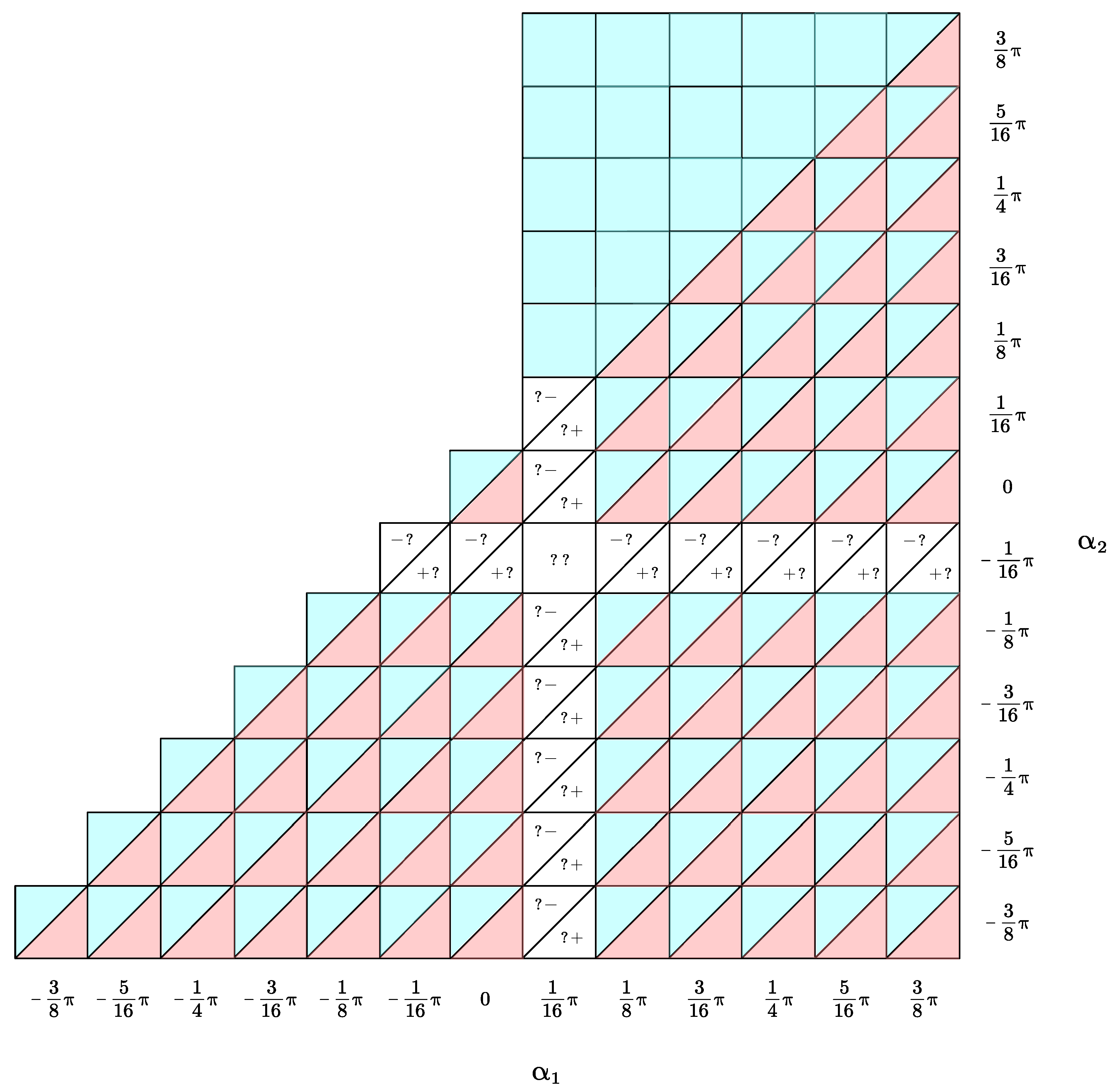
Paint
red if the corresponding
belongs to
. Paint
blue if the corresponding
belongs to
. Paint
half red half blue if there are two corresponding
, which belong to
and
, respectively. Marking the rest categories directly,
Figure 18 paints the whole region of
of interest. It is parts of the regions satisfying
.
It can be seen that most receive two applicable , belonging to and , respectively. While in the triangular region on the top, receive one applicable only, the type of which is .
As seen in
Figure 18, some
receive 2 roots of
. One can pick either root as wished, which can be interpreted as a color decision process: decide blue or red for the
painted in half red half blue in
Figure 18.
The gait plan problem is then equivalent to the following processes: 1. Find an enclosed curve (including an overlapping curve with zero size) in
plane in
Figure 18; 2. Decide the color for
(or decide
) traveled by the enclosed curve found; 3. Specify the decided four-dimensional curve with direction and time.
The following Two Color Map Theorem restricts the selection of , leading to a continuous gait.
Theorem 1. (Two Color Map Theorem)
The planned gait is continuous if the color selections of on the enclosed curve meet the following requirement: The adjacent are in the same color or do not violate the rule in Figure 17.
Theorem 2. (Proof of Two Color Map Theorem) The same colored adjacent indicate that and will not change the type of the plane when varies. Further, since varies continuously, is consequently continuous. The planned gait is a continuous gait.
Thus far, the method of planning a continuous gait robust to the attitude change in a tilt-rotor has been elucidated. Several examples are given in the next section.
5. Analysis of Typical Acceptable Gaits
This section evaluates four different gaits. Three of them satisfy for any given time. The rest one satisfies for any given time. In comparison, the relevant biased gaits (by scaling) are also evaluated.
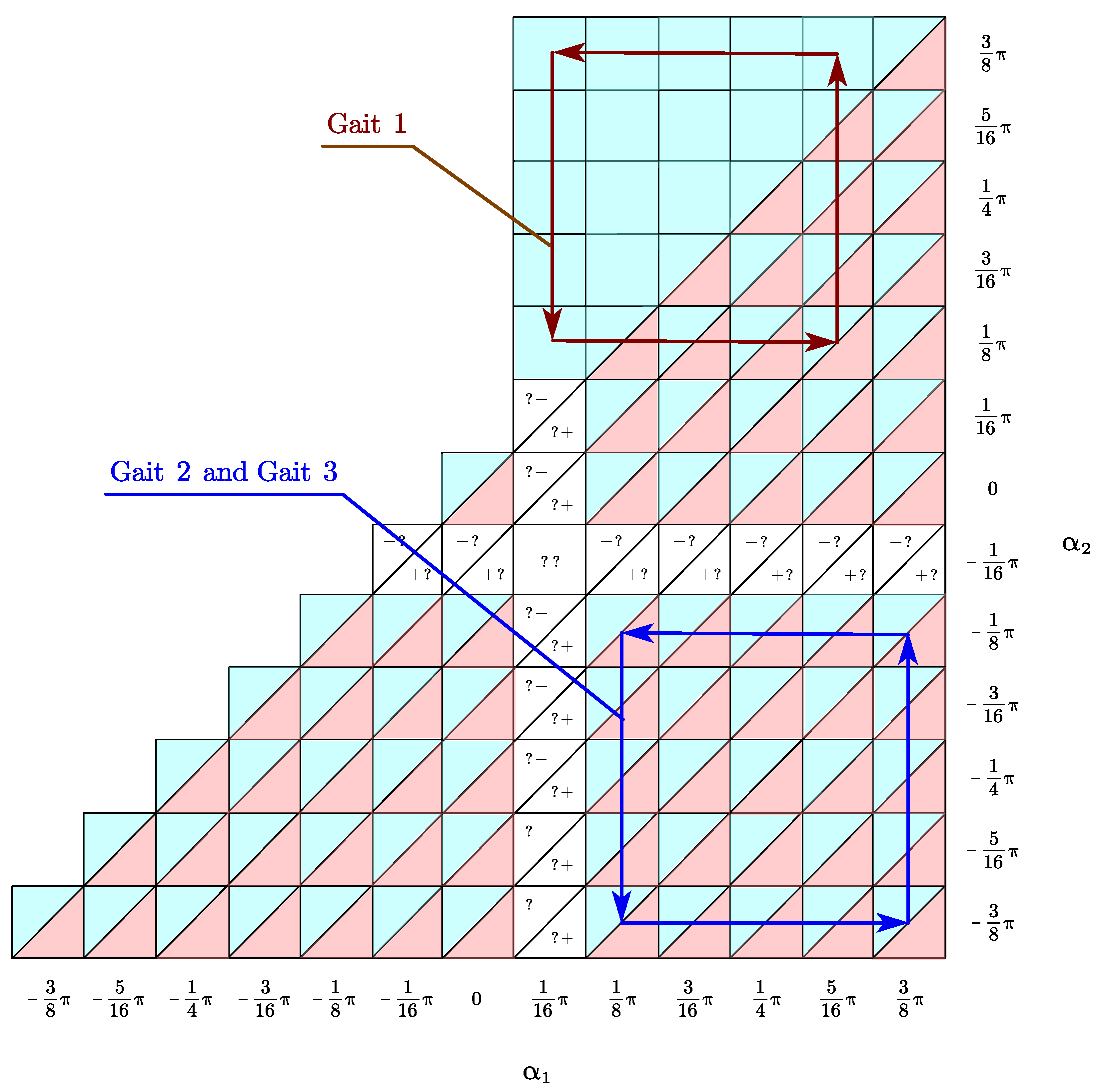
The gaits satisfying
, analyzed in this section are plotted in
Figure 19. Based on this choice, the color of all
traveled by the enclosed curve, Gait 1 in
Figure 19, are painted blue based on the Two Color Map Theorem.
On the other hand, the color of
traveled by the enclosed curve, Gait 2 and Gait 3 in
Figure 19, can be painted either all in blue or all in red based on the Two Color Map Theorem.
As for the gait (Gait 4, not sketched), satisfying
, there is only one root of
, belonging to
, corresponding to a given
(see
Figure 11 and
Figure 13). Varying
continuously naturally guarantees a continuous change in
.
The robustness to the disturbance in the roll angle and pitch angles of each proposed gait is evaluated. The unacceptable attitudes (roll and pitch) for each gait are found by violating Formula (1), e.g., equal the left side of Formula (1) zero.
The biased gaits not on the four-dimensional gait surface are coined to compare the robustness with the gaits on the four-dimensional gait surface. These biased gaits are generated by maintaining
identical to the acceptable gaits while scaling
throughout the entire gait:
where
is the scaling coefficient, which will be specified in each gait.
Note that though scaling evenly each tilting angle has been proven a valid approach in modifying a gait receiving a singular decoupling matrix [
27], the discussions on scaling unevenly, e.g., scaling
and
only, have not been addressed yet.
The period of the gait (T) is set as 1 s.
Define the
as a vertex of a four-dimensional curve if and only if
The number of the vertices of the four-dimensional curve in each designed gait in this research is four.
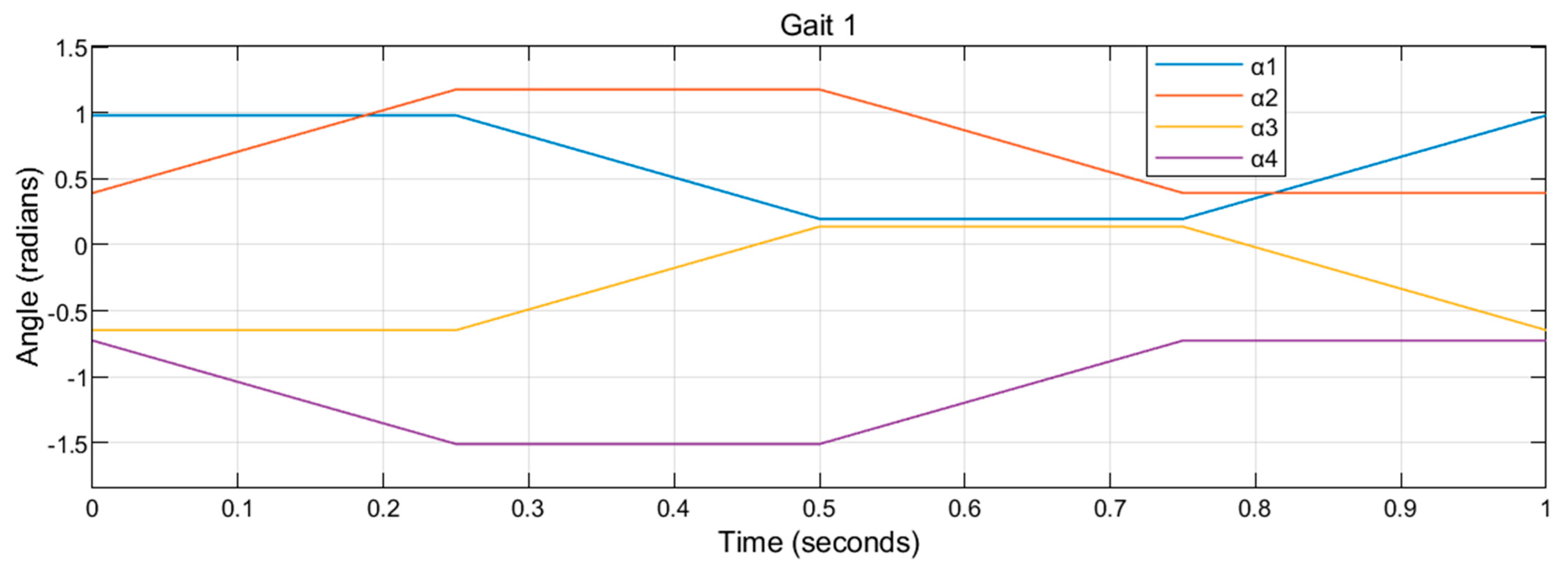
5.1. Gait 1
All projected by the four-dimensional curve (Gait 1) are painted in blue to meet Two Color Map Theorem.
The vertices of the gait
are:
,
,
,
. Gait 1 is plotted in
Figure 20.
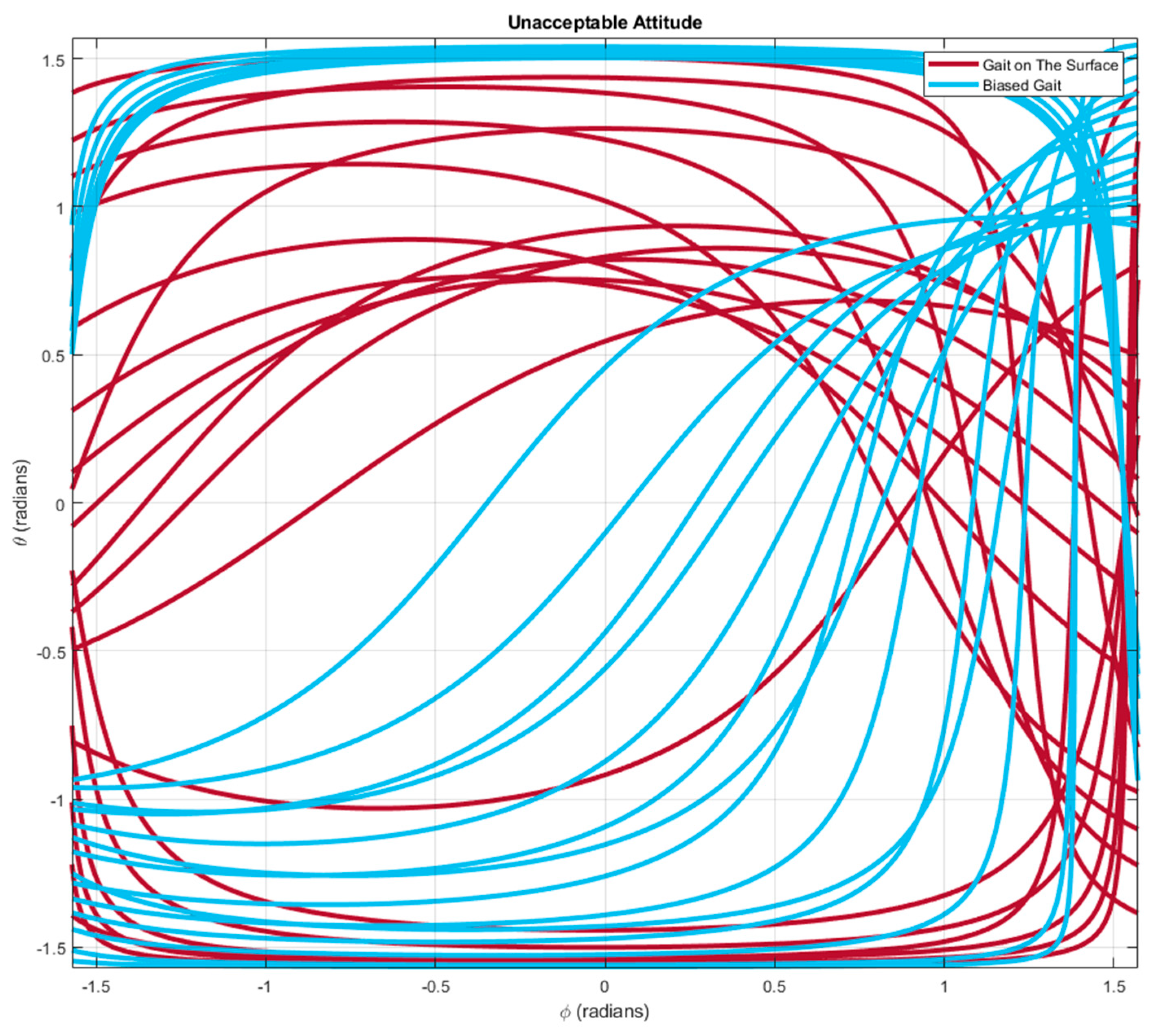
In comparison, the corresponding biased gait for Gait 1 is coined by setting the scaling coefficient, in Formulas (14) and (15), as 80%.
Figure 21 plots the unacceptable attitudes for the gait on the four-dimensional gait surface (red curves) and for the biased gait (blue curves).
It can be seen that the red curves are generally further to the origin, , comparing with the blue curves, demonstrating that the gait on the four-dimensional gait surface is allowed to move in a wider region of attitude.
5.2. Gait 2 and 3
All projected by the four-dimensional curve (Gait 2 and Gait 3) can either be painted in blue or in red to meet Two Color Map Theorem. This leads to Gait 2 (all in blue) and Gait 3 (all in red).
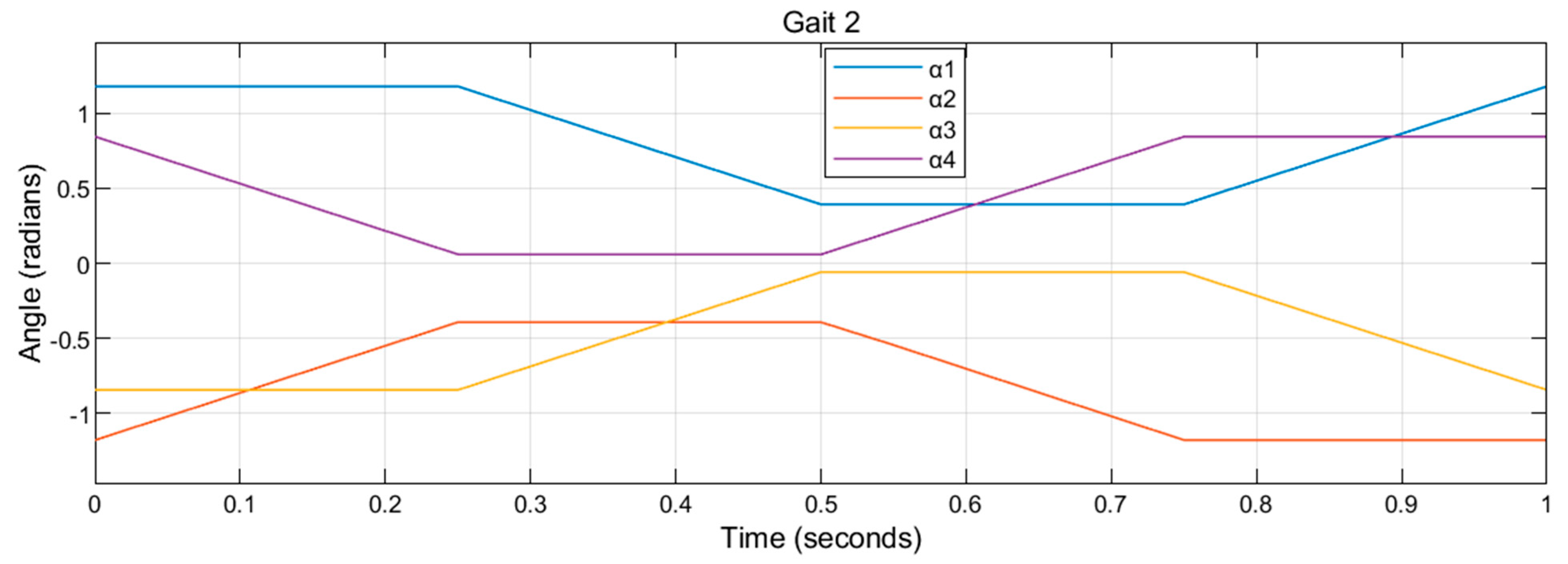
The vertices of the tilting angles
in Gait 2 are:
,
,
,
. Gait 2 is plotted in
Figure 22. The corresponding biased gait for Gait 2 is coined by setting the scaling coefficient,
in Formulas (14) and (15), as 99%.
Figure 23 plots the unacceptable attitudes for the gait on the four-dimensional gait surface (red curves) and for the biased gait (blue curves).
Similarly, the red curves are generally further to the origin, , comparing with the blue curves, demonstrating that the gait on the four-dimensional gait surface is allowed to move in a wider region of attitude.
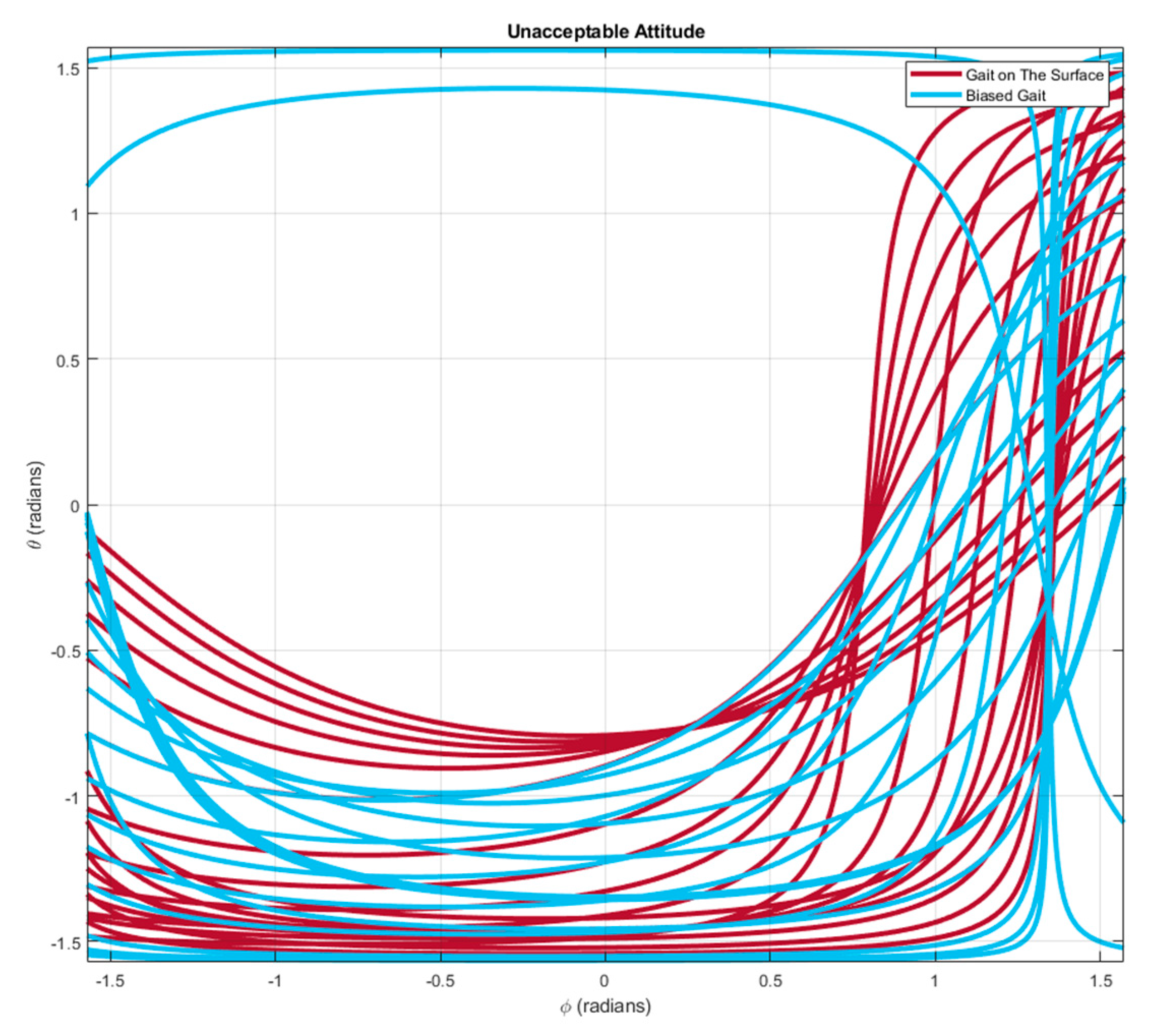
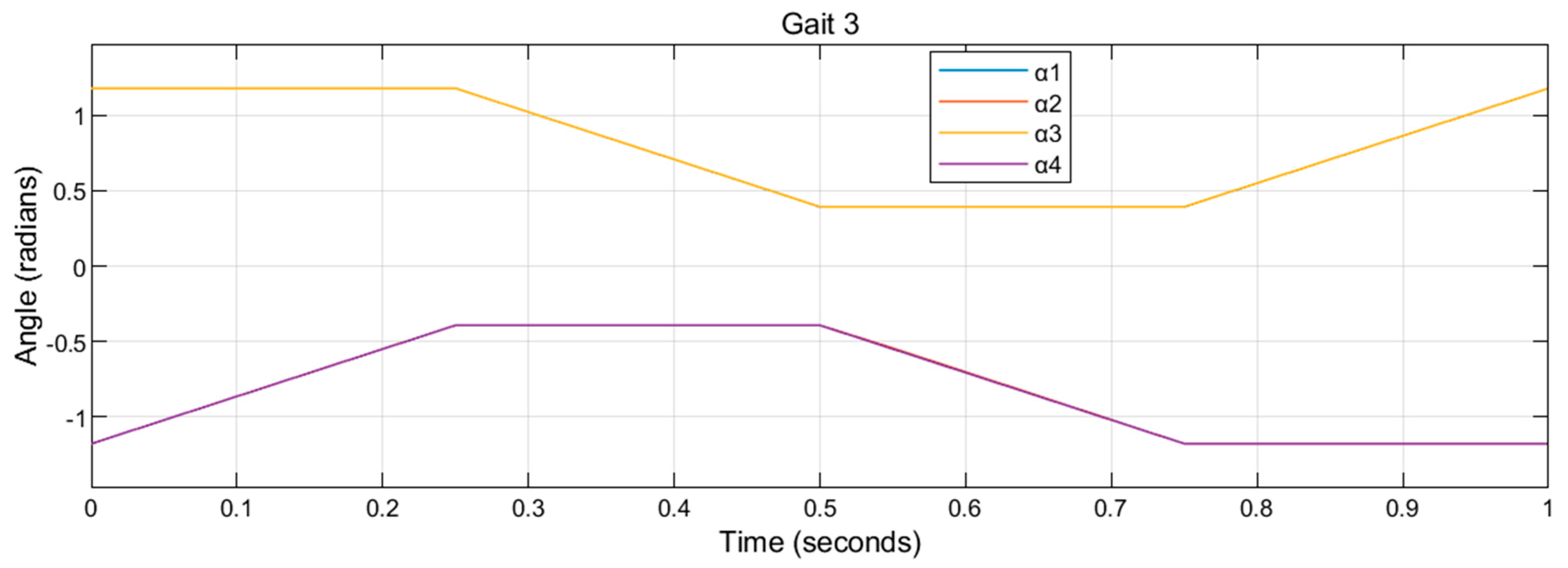
The vertices of the tilting angles
in Gait 3 are:
,
,
,
. Note that
,
in this case. Gait 3 is plotted in
Figure 24. The corresponding biased gait for Gait 3 is coined by setting the scaling coefficient,
in Formulas (14) and (15), as 80%.
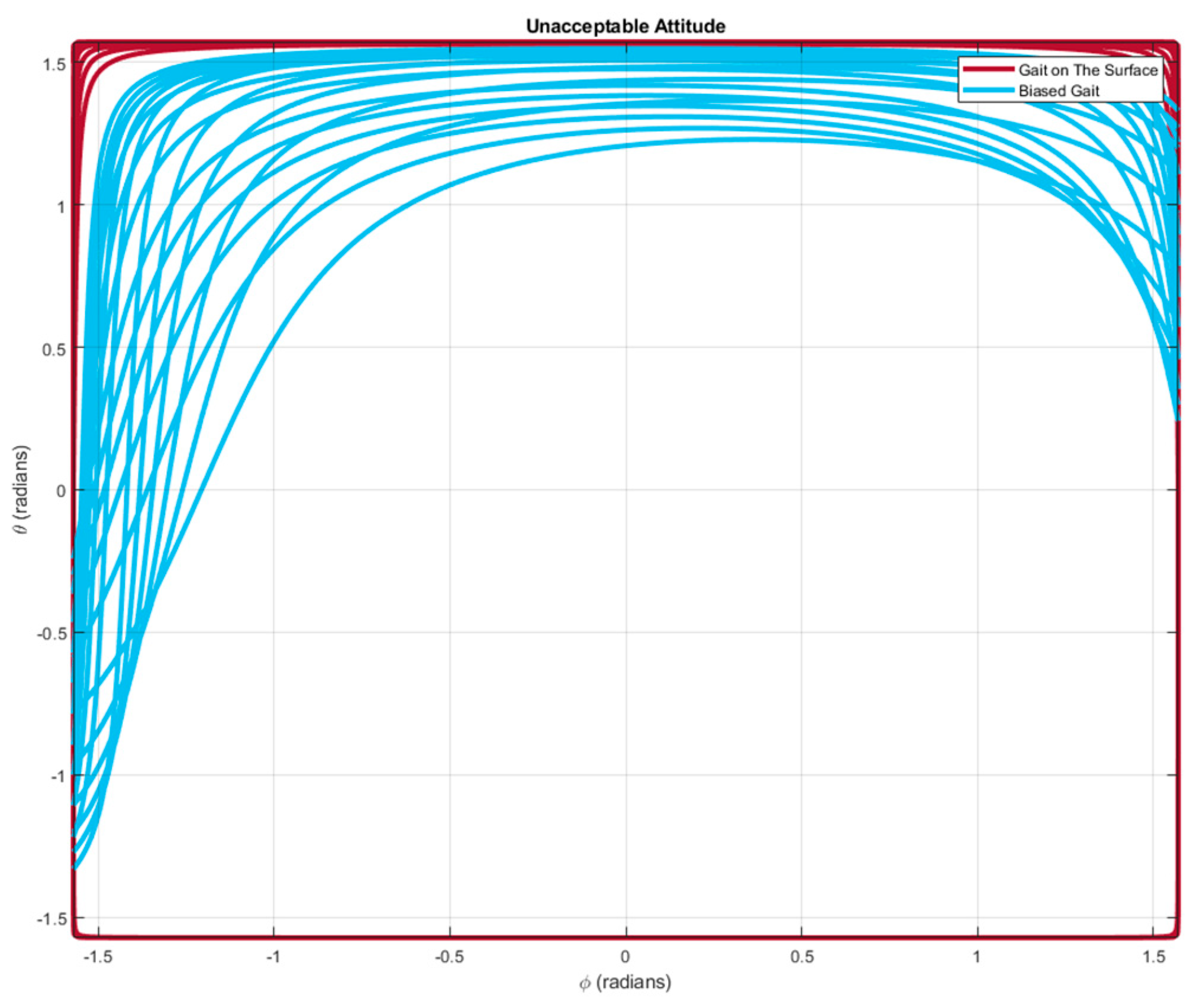
Figure 25 plots the unacceptable attitudes for the gait on the four-dimensional gait surface (red curves) and for the biased gait (blue curves).
Clearly, the red curves are generally further to the origin, , comparing with the blue curves, demonstrating that the gait on the four-dimensional gait surface is allowed to move in a wider region of attitude. The region of admissible attitudes enlarges nearly to the whole region of .
5.3. Gait 4
Gait 4 is designed on the four-dimensional gait surface satisfying
(
Figure 11 and
Figure 13). Only one root of
exists for a given
in this region, the triangular area of interest on
plane is governed by three vertices:
,
,
.
Moreover, varies continuously if varies continuously since all in this region, satisfying belong to .
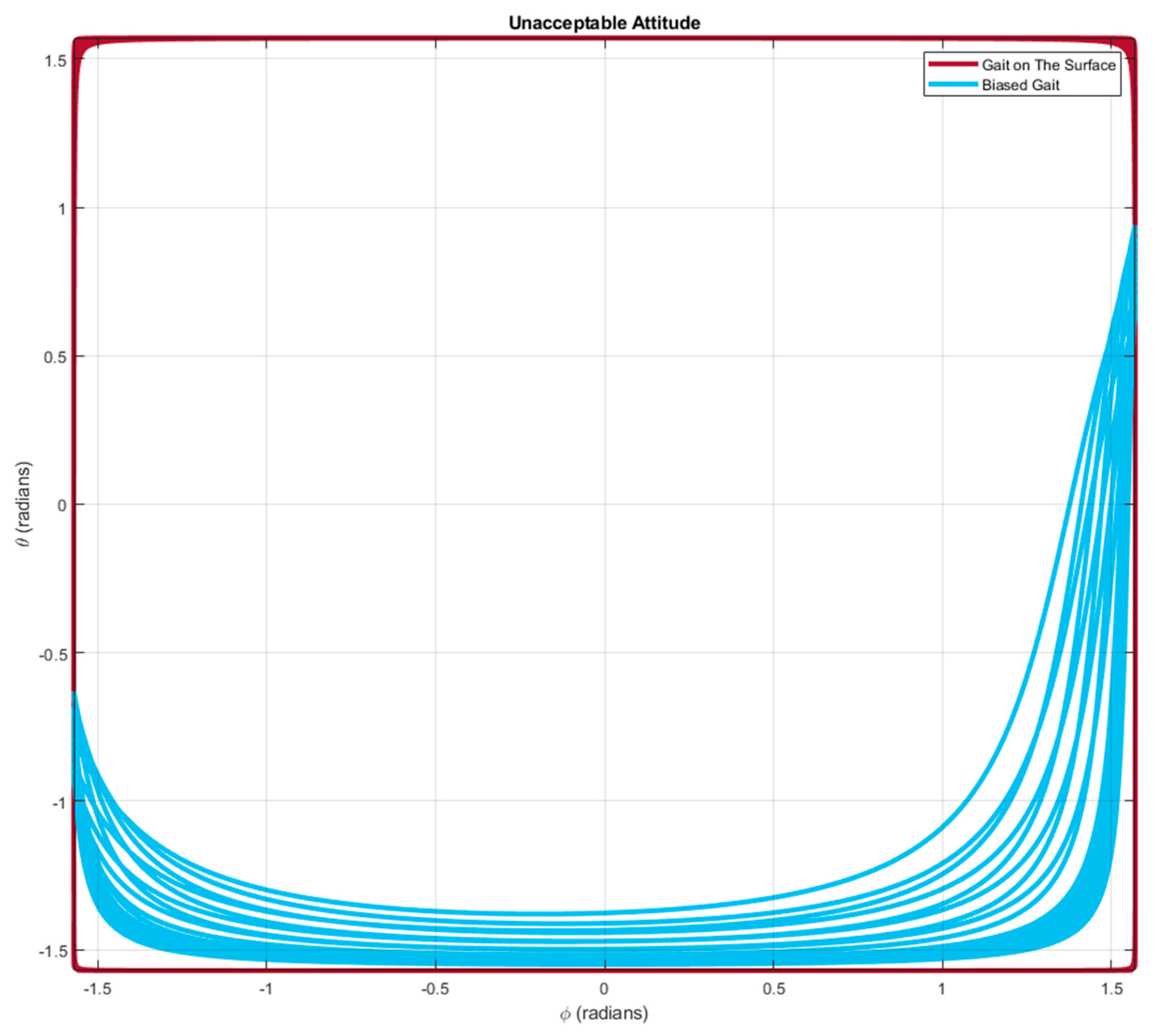
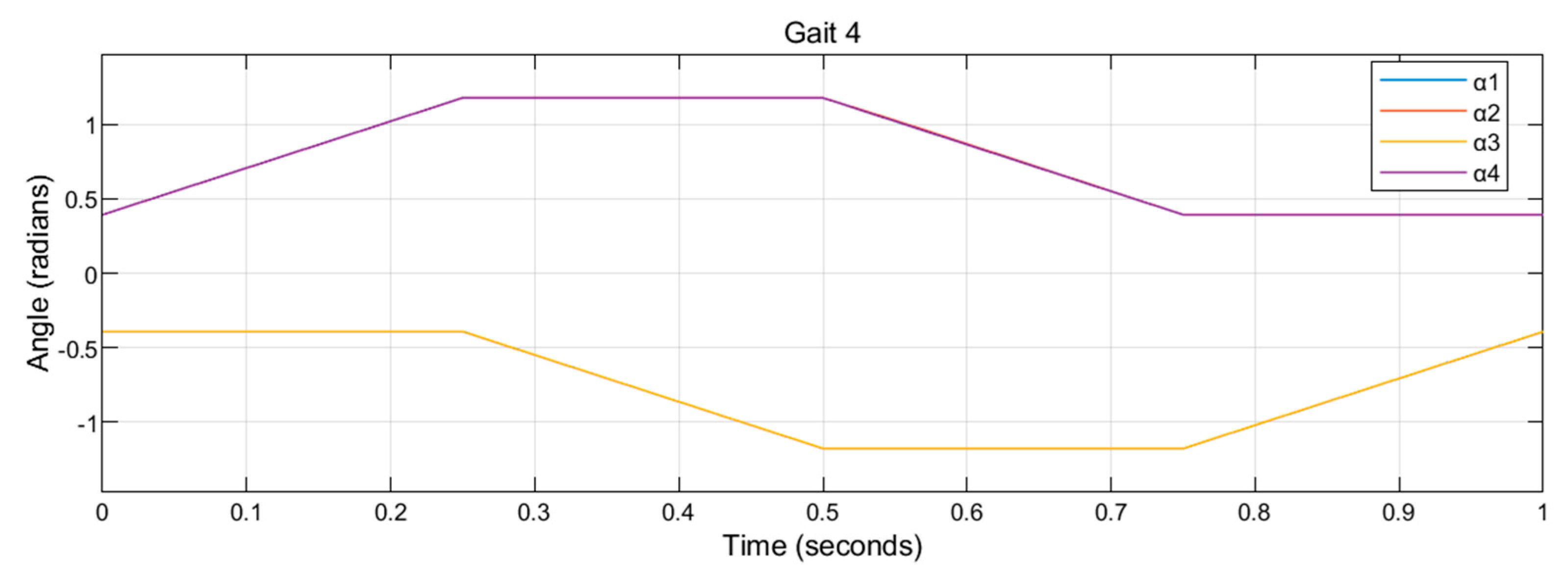
The vertices of the tilting angles
in Gait 4 are:
,
,
,
. Note that
,
in this case. Gait 4 is plotted in
Figure 26. The corresponding biased gait for Gait 4 is coined by setting the scaling coefficient,
in Formulas (14) and (15), as 80%.
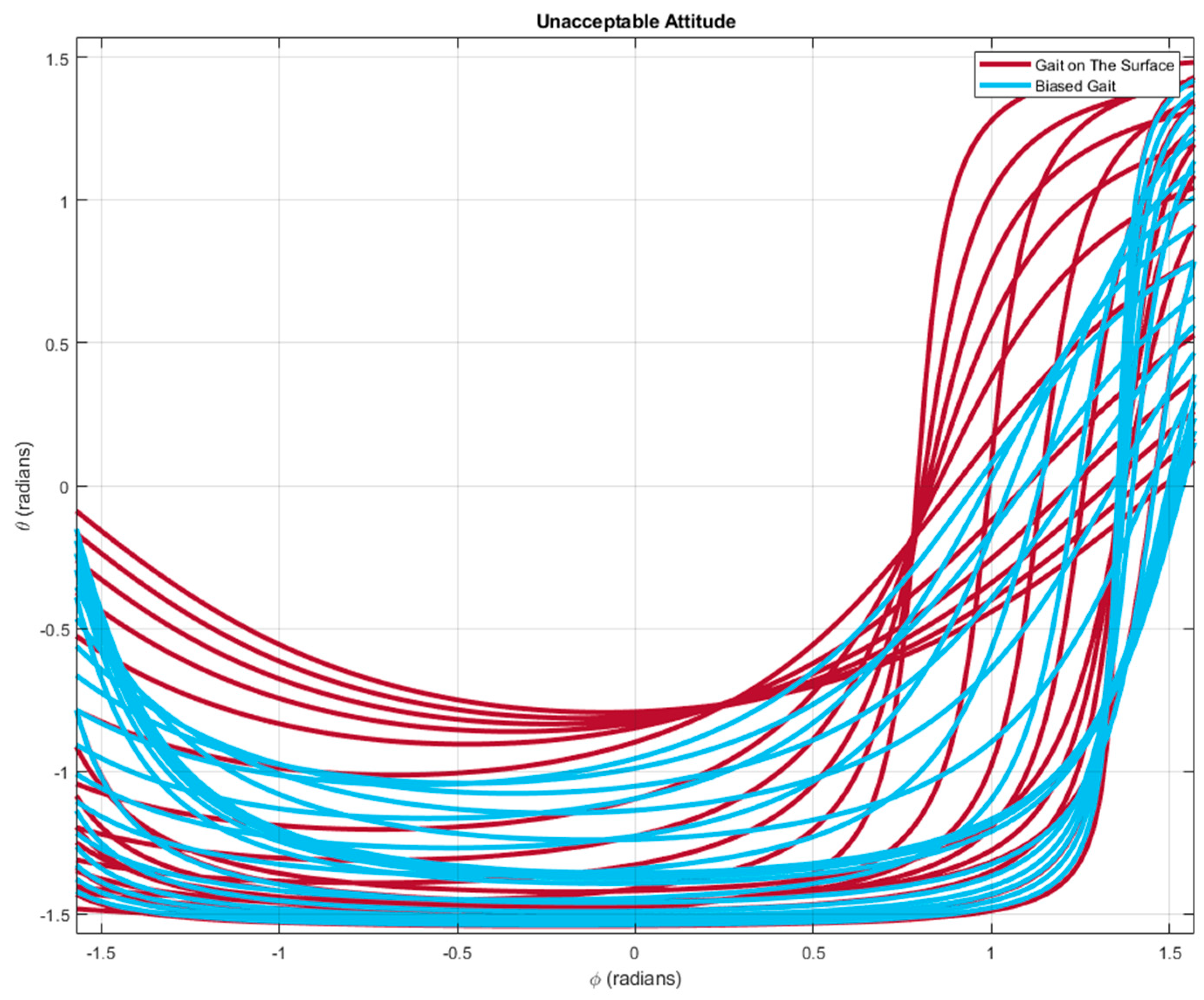
Figure 27 plots the unacceptable attitudes for the gait on the four-dimensional gait surface (red curves) and for the biased gait (blue curves).
Similar to the result in
Figure 25, the red curves in
Figure 27 are also generally further to the origin,
, comparing with the blue curves, demonstrating that the gait on the four-dimensional gait surface is allowed to move in a wider region of attitude. The region of admissible attitudes enlarges nearly to the whole region of
.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}