
Novel Drone Design Using an Optimization Software with 3D Model, Simulation, and Fabrication in Drone Systems Research



Abstract
:1. Introduction
2. Materials and Methods
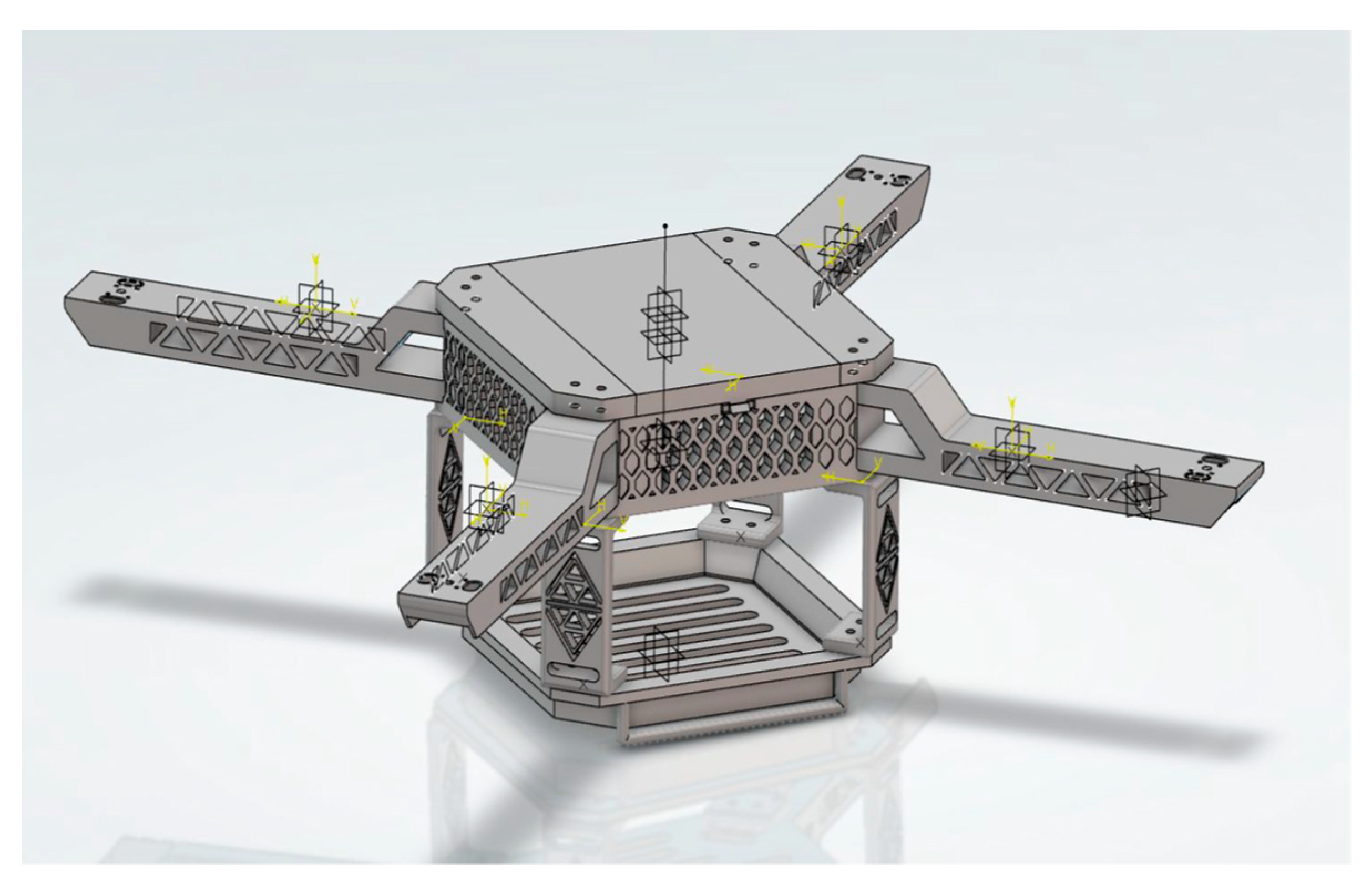
2.1. Drone Frame and Originality in Design
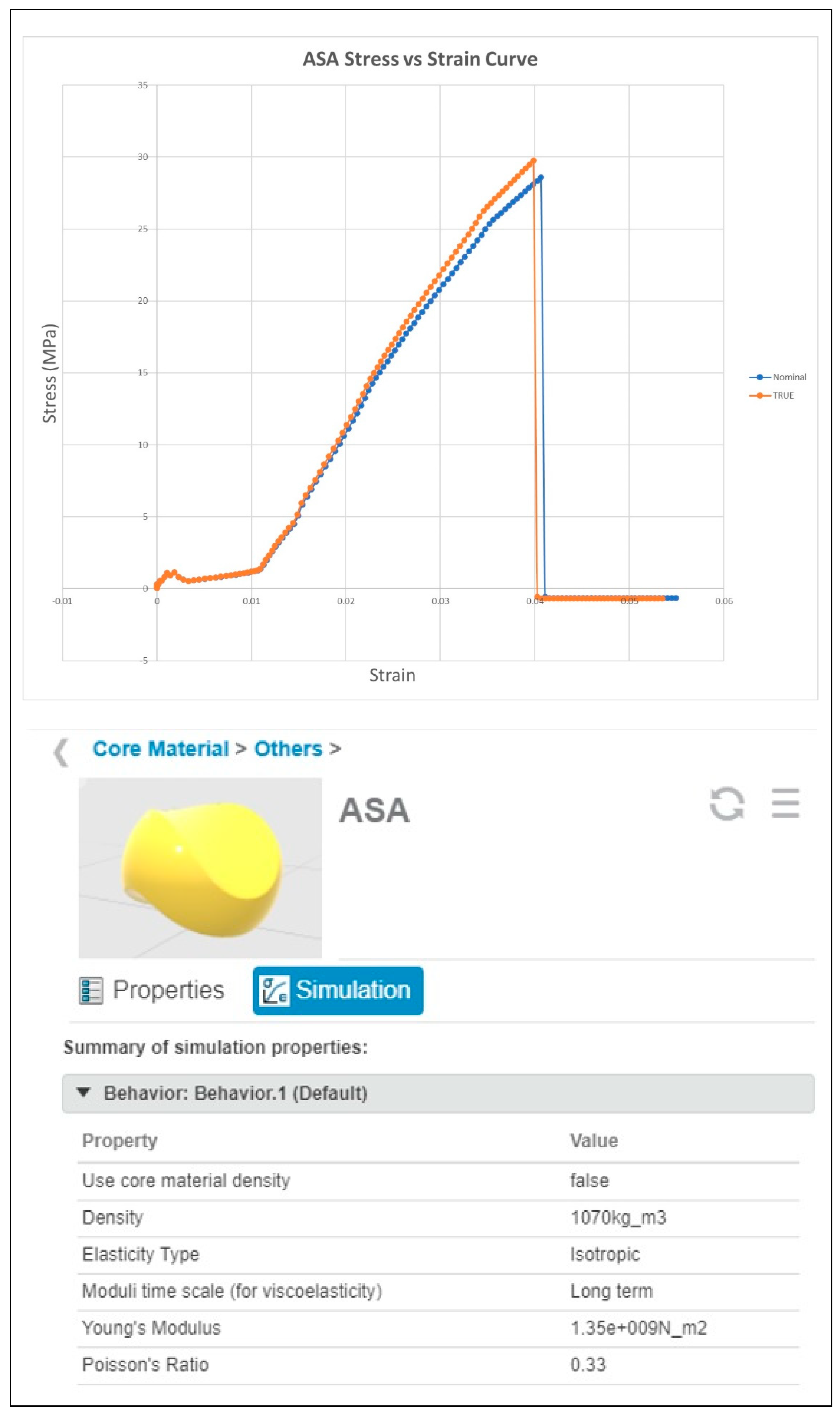
2.2. Material Selection
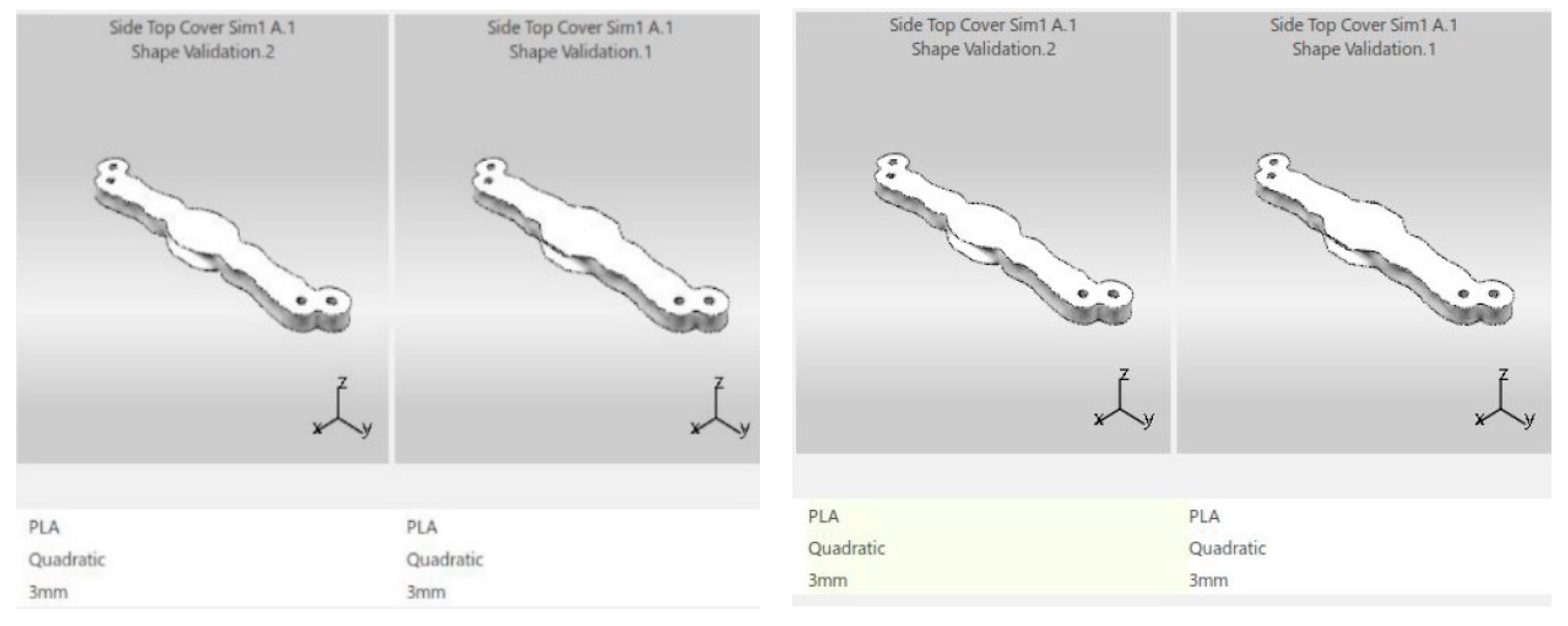
2.3. Sketch Constraint and Design for Manufacturability
2.4. Carriage (Payload) and DOF
3. System Simulation
Restrain/Connection
4. Results and Discussion
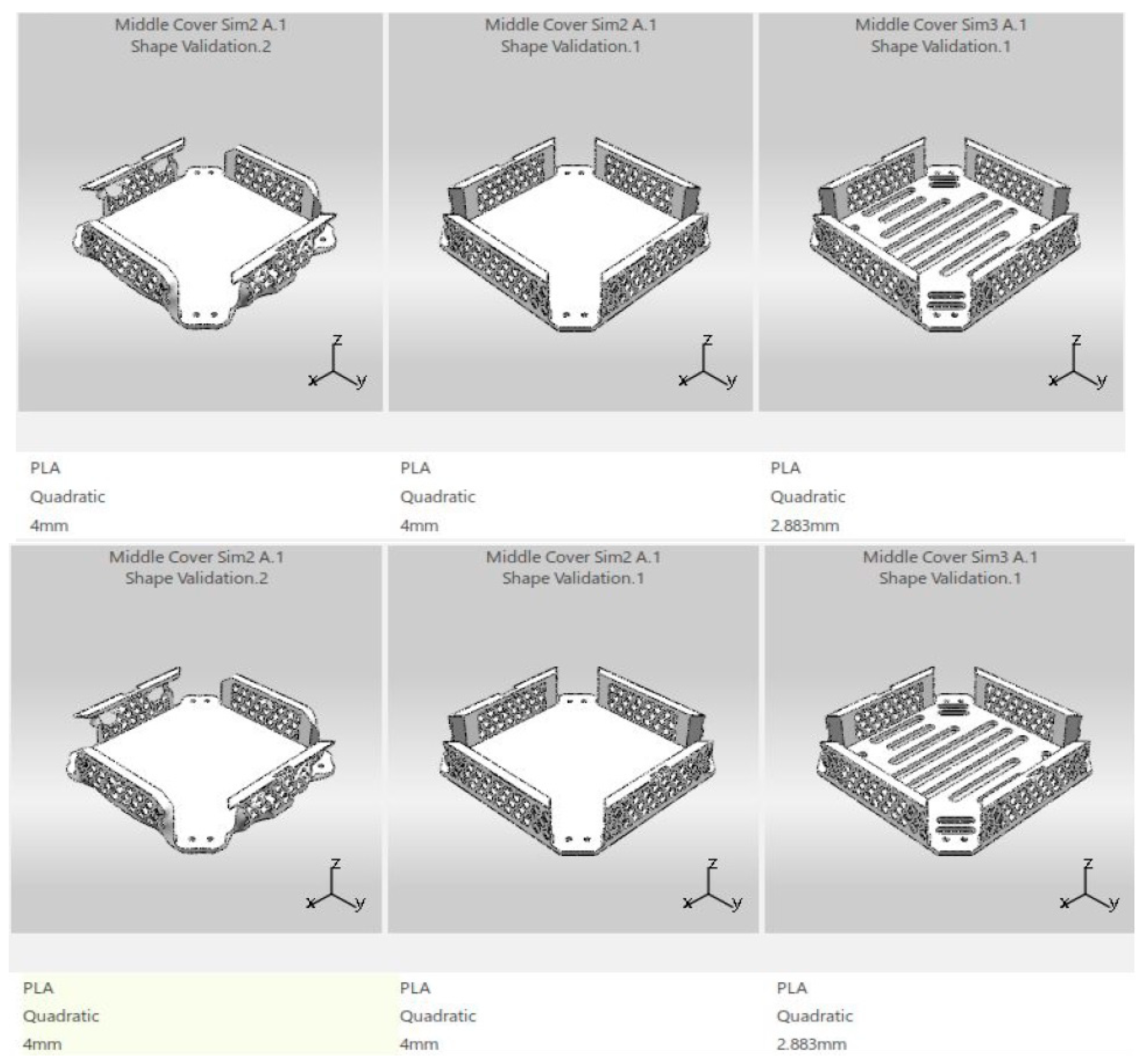
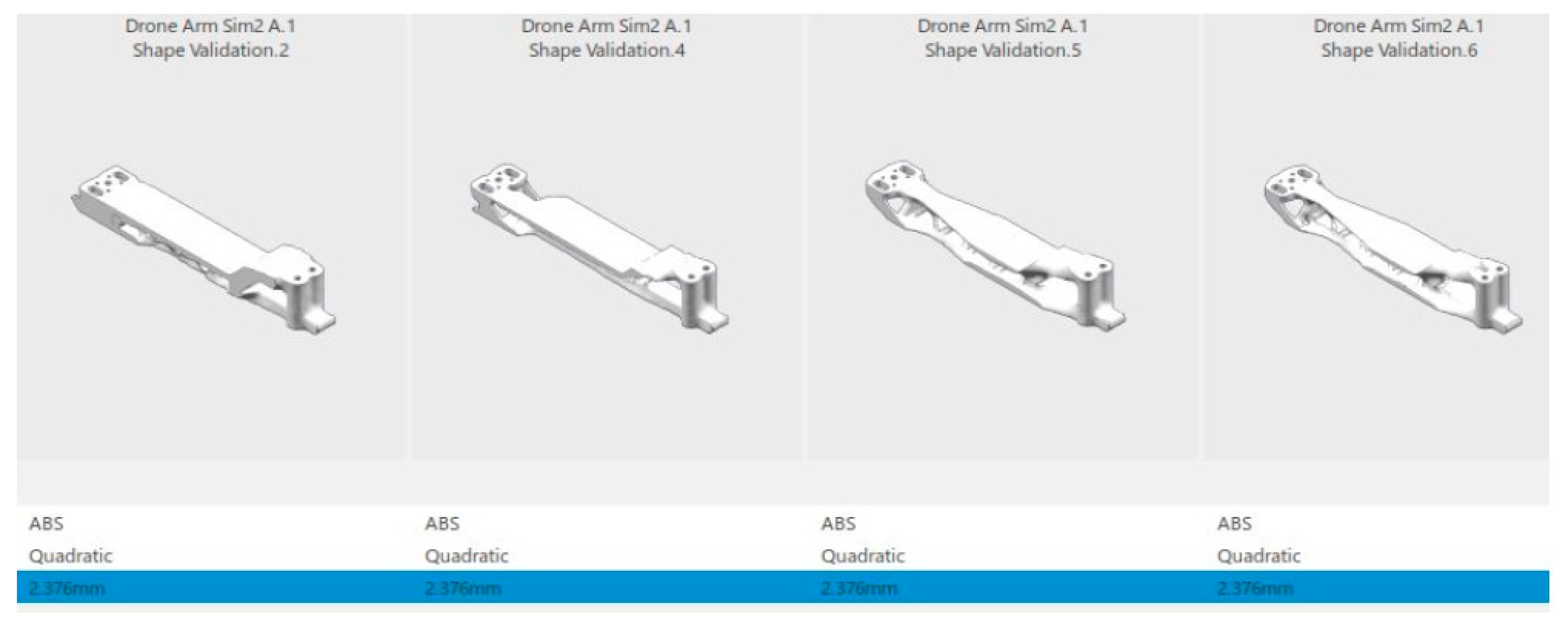
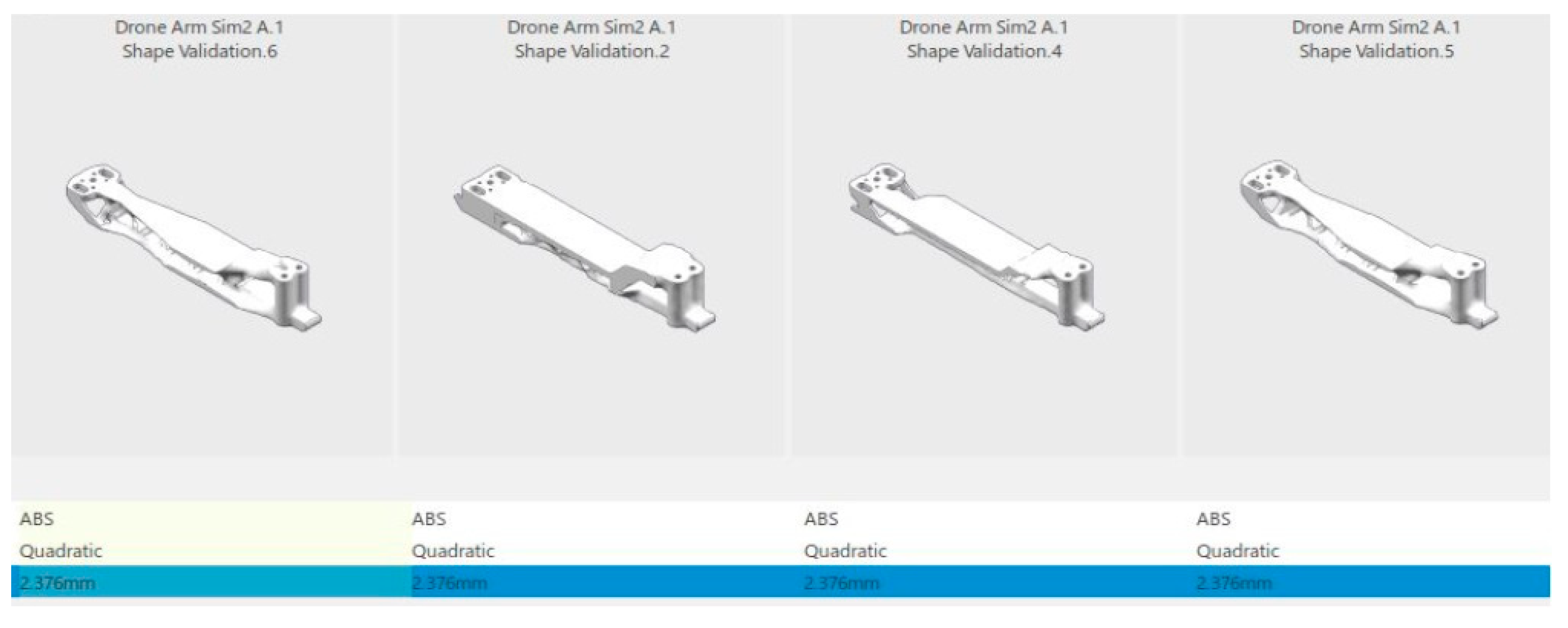
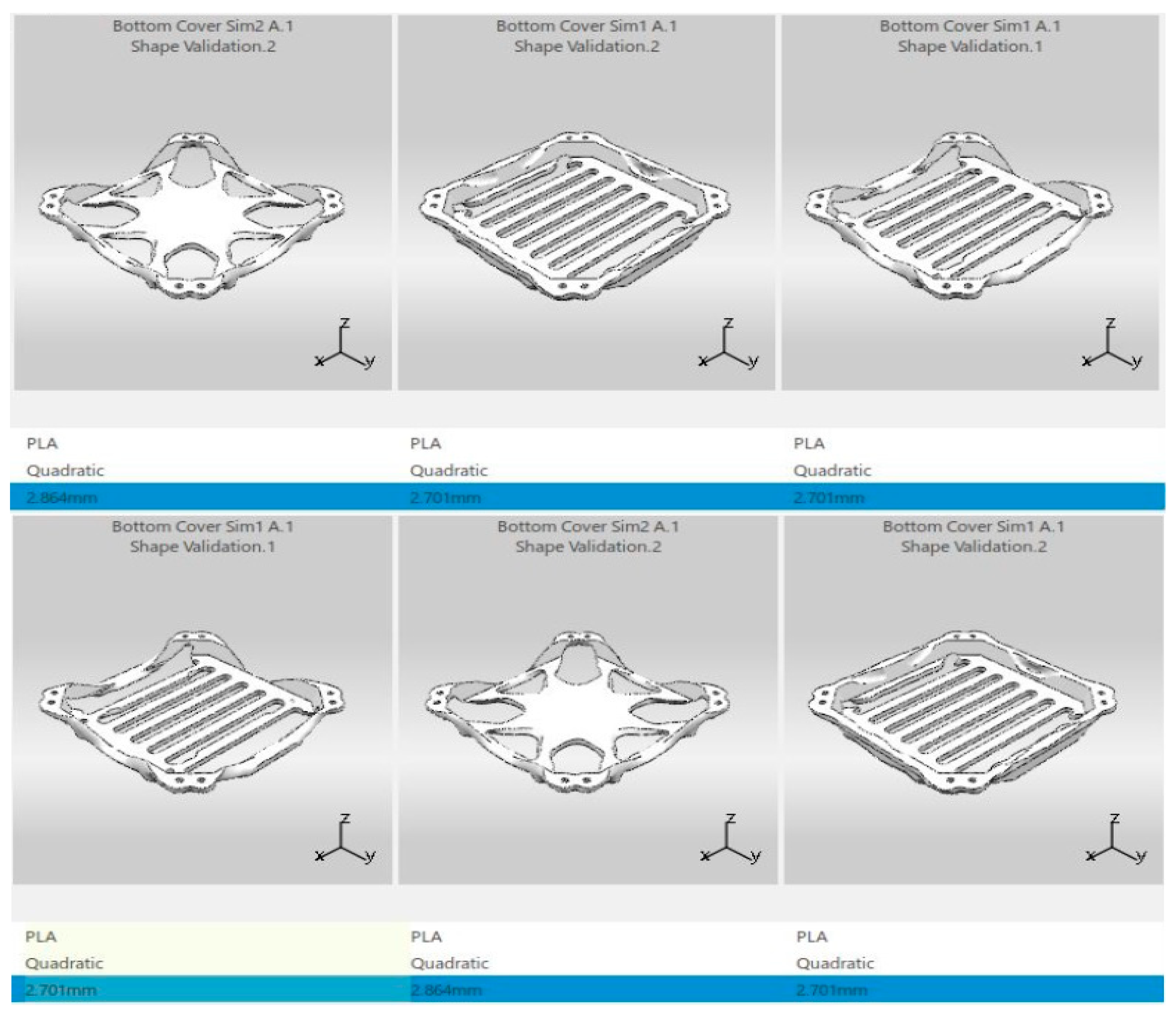
4.1. Drone’s Parts’ Stress and Displacement
4.2. Trade-Off Study
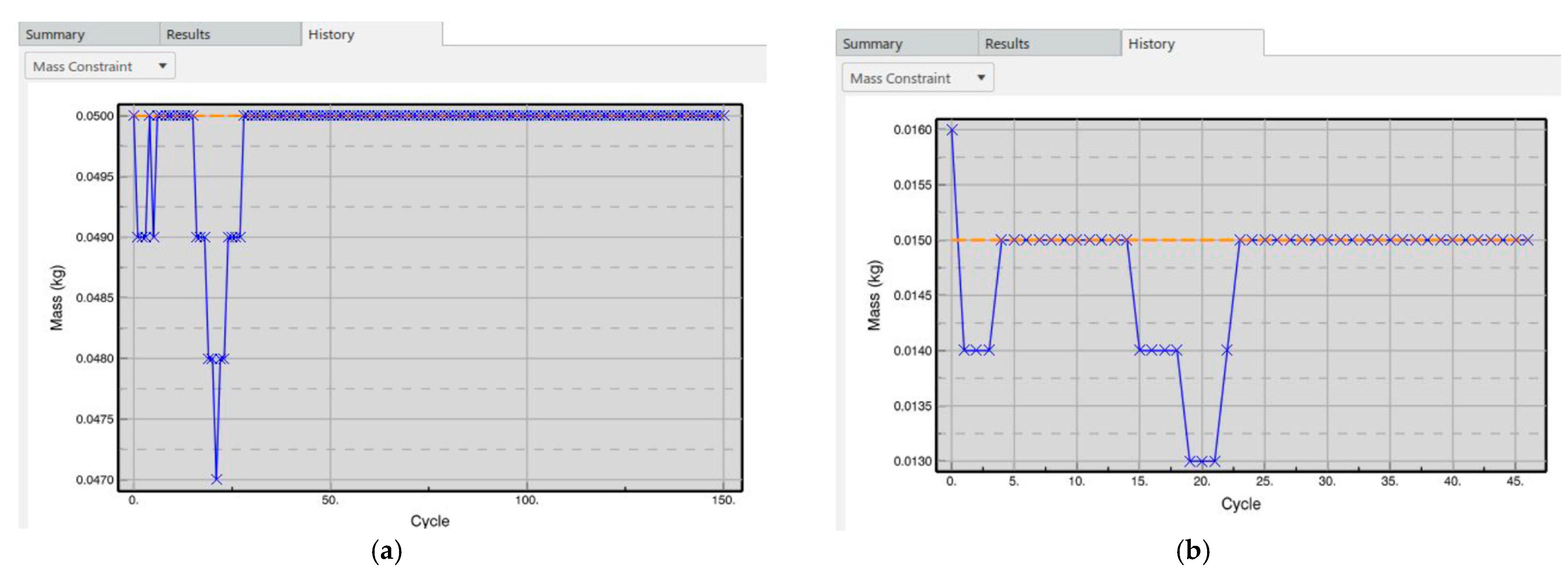
4.3. Simulation Results of Drone’s Weight
4.4. Final Hardware Design
4.5. Three Dimensional Printing Process
- Download and install Cura.
- Slice the 3D model into smaller pieces.
- Three Dimensional model saved to an SD card as G-Code.
- SD card is inserted into the 3D printer.
- Load filament into the 3D printer.
- Activate the printing application.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Oakey, A.; Waters, T.; Zhu, W.; Royall, P.; Cherrett, T.; Courtney, P.; Majoe, D.; Jelev, N. Quantifying the Effects of Vibration on Medicines in Transit Caused by Fixed-Wing and Multi-Copter Drones. Drones 2021, 5, 22. [Google Scholar] [CrossRef]
- Hiebert, B.; Nouvet, E.; Jeyabalan, V.; Donelle, L. The Application of Drones in Healthcare and Health-Related Services in North America: A Scoping Review. Drones 2020, 4, 30. [Google Scholar] [CrossRef]
- Akhloufi, M.; Couturier, A.; Castro, N. Unmanned Aerial Vehicles for Wildland Fires: Sensing, Perception, Cooperation and Assistance. Drones 2021, 5, 15. [Google Scholar] [CrossRef]
- Barreto, J.; Cajaíba, L.; Teixeira, J.; Nascimento, L.; Giacomo, A.; Barcelos, N.; Fettermann, T.; Martins, A. Drone-Monitoring: Improving the Detectability of Threatened Marine Megafauna. Drones 2021, 5, 14. [Google Scholar] [CrossRef]
- A Game Changer for Business and Innovation. Available online: https://www.3ds.com/3dexperience (accessed on 28 February 2022).
- Royo, P.; Pastor, E.; Barrado, C.; Cuadrado, R.; Barrao, F.; Garcia, A. Hardware Design of a Small UAS Helicopter for Remote Sensing Operations. Drones 2017, 1, 3. [Google Scholar] [CrossRef] [Green Version]
- Dawkins, J.; Devries, L. Modeling, Trim Analysis, and Trajectory Control of a Micro-Quadrotor with Wings. Drones 2018, 2, 21. [Google Scholar] [CrossRef] [Green Version]
- Shukla, D.; Komerath, N. Multirotor Drone Aerodynamic Interaction Investigation. Drones 2018, 2, 43. [Google Scholar] [CrossRef] [Green Version]
- Castiblanco, J.M.; Garcia-Nieto, S.; Simarro, R.; Salcedo, J. Experimental study on the dynamic behaviour of drones designed for racing competitions. Int. J. Micro Air Veh. 2021, 13, 17568293211005757. [Google Scholar] [CrossRef]
- Basson, C.; Hansraj, S.; Stopforth, R.; Mooney, P.; Phillips, R.; Van Niekerk, T.; Du Preez, K. A Review of Collaborated Educational Drone Development and Design at the BRICS 2018 Future Skills Challenge. In Proceedings of the 2019 Southern African Universities Power Engineering Conference/Robotics and Mechatronics/Pattern Recognition Association of South Africa (SAUPEC/RobMech/PRASA), Bloemfontein, South Africa, 28–30 January 2019; pp. 17–22. [Google Scholar] [CrossRef]
- Jo, B.W.; Song, C.S. Thermoplastics and Photopolymer Desktop 3D Printing System Selection Criteria Based on Technical Specifications and Performances for Instructional Applications. Technologies 2021, 9, 91. [Google Scholar] [CrossRef]
- Horvath, J.; Cameron, R. The Desktop 3D Printer. In 3D Print with MatterControl; Springer: Berkeley, CA, USA, 2015; pp. 3–13. [Google Scholar] [CrossRef]
- Kacmarcik, J.; Spahic, D.; Varda, K.; Porca, E.; Zaimovic-Uzunovic, N. An investigation of geometrical accuracy of desktop 3D printers using CMM. IOP Conf. Series: Mater. Sci. Eng. 2018, 393, 012085. [Google Scholar] [CrossRef]
- 3D Printing Third Edition. Available online: https://lib.hpu.edu.vn/handle/123456789/31244 (accessed on 27 February 2022).
- Shahrubudin, N.; Lee, T.; Ramlan, R. An Overview on 3D Printing Technology: Technological, Materials, and Applications. Procedia Manuf. 2019, 35, 1286–1296. [Google Scholar] [CrossRef]
- Arefin, A.; Khatri, N.; Kulkarni, N.; Egan, P. Polymer 3D Printing Review: Materials, Process, and Design Strategies for Medical Applications. Polymers 2021, 13, 1499. [Google Scholar] [CrossRef]
- Antreas, K.; Piromalis, D. Employing a Low-Cost Desktop 3D Printer: Challenges, and How to Overcome Them by Tuning Key Process Parameters. Int. J. Mech. Appl. 2021, 10, 11–19. [Google Scholar] [CrossRef]
- Haryńska, A.; Carayon, I.; Kosmela, P.; Szeliski, K.; Łapiński, M.; Pokrywczyńska, M.; Kucińska-Lipka, J.; Janik, H. A comprehensive evaluation of flexible FDM/FFF 3D printing filament as a potential material in medical application. Eur. Polym. J. 2020, 138, 109958. [Google Scholar] [CrossRef]
- Krishnanand; Soni, S.; Taufik, M. Design and assembly of fused filament fabrication (FFF) 3D printers. Mater. Today Proc. 2020, 46, 5233–5241. [Google Scholar] [CrossRef]
- Vasudevarao, B.; Natarajan, D.P.; Henderson, M. Sensitivity of Rp Surface Finish to Process. In Proceedings of the 2000 International Solid Freeform Fabrication Symposium, Austin, TX, USA, 25–27 July 2000; pp. 251–258. [Google Scholar]
- Galatas, A.; Hassanin, H.; Zweiri, Y.; Seneviratne, L. Additive Manufactured Sandwich Composite/ABS Parts for Unmanned Aerial Vehicle Applications. Polymers 2018, 10, 1262. [Google Scholar] [CrossRef] [Green Version]
- Bishay, P.L.; Burg, E.; Akinwunmi, A.; Phan, R.; Sepulveda, K. Development of a New Span-Morphing Wing Core Design. Designs 2019, 3, 12. [Google Scholar] [CrossRef] [Green Version]
- Sharma, V. Advances in Drone Communications, State-of-the-Art and Architectures. Drones 2019, 3, 21. [Google Scholar] [CrossRef] [Green Version]
- Muralidharan, N.; Pratheep, V.; Shanmugam, A.; Hariram, A.; Dinesh, P.; Visnu, B. Structural analysis of mini drone developed using 3D printing technique. Mater. Today Proc. 2021, 46, 8748–8752. [Google Scholar] [CrossRef]
- Negrelli, V. “From earth to heaven”: How professional 3D Printing and Windform® GT material helped in the construction of drone and medical devices. Reinf. Plast. 2017, 61, 179–183. [Google Scholar] [CrossRef]
- Kantaros, A.; Diegel, O. 3D printing technology in musical instrument research: Reviewing the potential. Rapid Prototyp. J. 2018, 24, 1511–1523. [Google Scholar] [CrossRef]
- Shen, C.H.; Albert, F.Y.C.; Ang, C.K.; Teck, D.J.; Chan, K.P. Theoretical development and study of takeoff constraint thrust equation for a drone. In Proceedings of the 2017 IEEE 15th Student Conference on Research and Development (SCOReD), Wilayah Persekutuan Putrajaya, Malaysia, 13–14 December 2017; pp. 18–22. [Google Scholar] [CrossRef]
- Research and Development in Modern Materials. Available online: https://blogs.deakin.edu.au/remstep/materials-activities/honeycomb-structures/ (accessed on 1 January 2022).
- Amza, C.G.; Zapciu, A.; Eyþórsdóttir, A.; Björnsdóttir, A.; Borg, J. Mechanical properties of 3D printed composites with ABS/ASA substrate and glass fiber inserts. In Proceedings of the MATEC Web of Conferences, Kursk, Russia, 1 November 2019; Volume 290, p. 04002. [Google Scholar] [CrossRef]
- Afshar, A.; Wood, R. Development of Weather-Resistant 3D Printed Structures by Multi-Material Additive Manufacturing. J. Compos. Sci. 2020, 4, 94. [Google Scholar] [CrossRef]
- Butt, J.; Bhaskar, R. Investigating the effects of annealing on the mechanical properties of FFF-printed thermoplastics. J. Manuf. Mater. Process. 2020, 4, 94. [Google Scholar] [CrossRef]
- Comparing 3D Printing Filament Features: ABS vs. ASA Filament. Available online: https://www.makeshap-er.com/2020/01/24/3d-printing-filament-features-abs-vs-asa-filament/ (accessed on 28 February 2022).
- Iannace, S.; Sorrentino, L.; Di Maio, E. Biodegradable Biomedical Foam Scaffolds; Woodhead Publishing Limited: Federico II, Italy, 2014; pp. 163–187. [Google Scholar] [CrossRef]
- Malaysian Information Climate. Available online: https://www.malaysia.gov.my/portal/content/144 (accessed on 28 February 2022).
- Rayna, T.; Striukova, L. From rapid prototyping to home fabrication: How 3D printing is changing business model innovation. Technol. Forecast. Soc. Chang. 2016, 102, 214–224. [Google Scholar] [CrossRef] [Green Version]
- Brischetto, S.; Torre, R. Preliminary Finite Element Analysis and Flight Simulations of a Modular Drone Built through Fused Filament Fabrication. J. Compos. Sci. 2021, 5, 293. [Google Scholar] [CrossRef]
- Kantaros, A.; Piromalis, D.; Tsaramirsis, G.; Papageorgas, P.; Tamimi, H. 3D Printing and Implementation of Digital Twins: Current Trends and Limitations. Appl. Syst. Innov. 2022, 5, 7. [Google Scholar] [CrossRef]
- Kantaros, A.; Karalekas, D. FBG Based In Situ Characterization of Residual Strains in FDM Process. Conf. Proc. Soc. Exp. Mech. Ser. 2014, 8, 333–337. [Google Scholar] [CrossRef]
- 3D Robotics IRIS + RTF Kit (433). Available online: https://www.megapixel.cz/3d-robotics-iris-433 (accessed on 2 March 2022).
- Skeleton X-14 Quadcopter. Available online: https://cults3d.com/en/3d-model/gadget/skeleton-x-14-quadcopter (accessed on 2 March 2022).













| Category | Part Name | Numbers of Parts | |
|---|---|---|---|
| Upper drone | Drone Frame | Centre Top Cover | 1 |
| Side Top Cover | 2 | ||
| Drone Arm | 4 | ||
| Lower drone | Carriage (Payload) | Middle Cover | 1 |
| Leg Bracket | 4 | ||
| Bottom Cover | 1 | ||
| Landing Force | |
| 1 part | 1600 g/15.6906 N |
| 2 parts | 800 g/7.8453 N |
| 4 parts | 400 g/3.9227 N |
| Lifting Force | |
| 1 part | 20 N |
| 2 parts | 10 N |
| 4 parts | 5 N |
| Material | PLA | ASA | ABS | PETG |
|---|---|---|---|---|
| Density (kg/m3) | 1240 | 1070 | 1050 | 1270 |
| Young’s Modulus (MPa) | 1.98 × 109 | 1.35 × 109 | 1.70 × 109 | 1.38 × 109 |
| Poisson Ratio | 0.33 | |||
| Maximum Stress before breaking (MPa) | 47 | 28 | 35 | - |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MohamedZain, A.O.; Chua, H.; Yap, K.; Uthayasurian, P.; Jiehan, T. Novel Drone Design Using an Optimization Software with 3D Model, Simulation, and Fabrication in Drone Systems Research. Drones 2022, 6, 97. https://doi.org/10.3390/drones6040097
MohamedZain AO, Chua H, Yap K, Uthayasurian P, Jiehan T. Novel Drone Design Using an Optimization Software with 3D Model, Simulation, and Fabrication in Drone Systems Research. Drones. 2022; 6(4):97. https://doi.org/10.3390/drones6040097
Chicago/Turabian StyleMohamedZain, Ahmed. O., Huangshen Chua, Kianmeng Yap, Pavithren Uthayasurian, and Teoh Jiehan. 2022. "Novel Drone Design Using an Optimization Software with 3D Model, Simulation, and Fabrication in Drone Systems Research" Drones 6, no. 4: 97. https://doi.org/10.3390/drones6040097
APA StyleMohamedZain, A. O., Chua, H., Yap, K., Uthayasurian, P., & Jiehan, T. (2022). Novel Drone Design Using an Optimization Software with 3D Model, Simulation, and Fabrication in Drone Systems Research. Drones, 6(4), 97. https://doi.org/10.3390/drones6040097