
Detection of Forest Tree Losses in Côte d’Ivoire Using Drone Aerial Images

 , , , and
, , , and
Abstract
1. Introduction
2. Materials and Methods
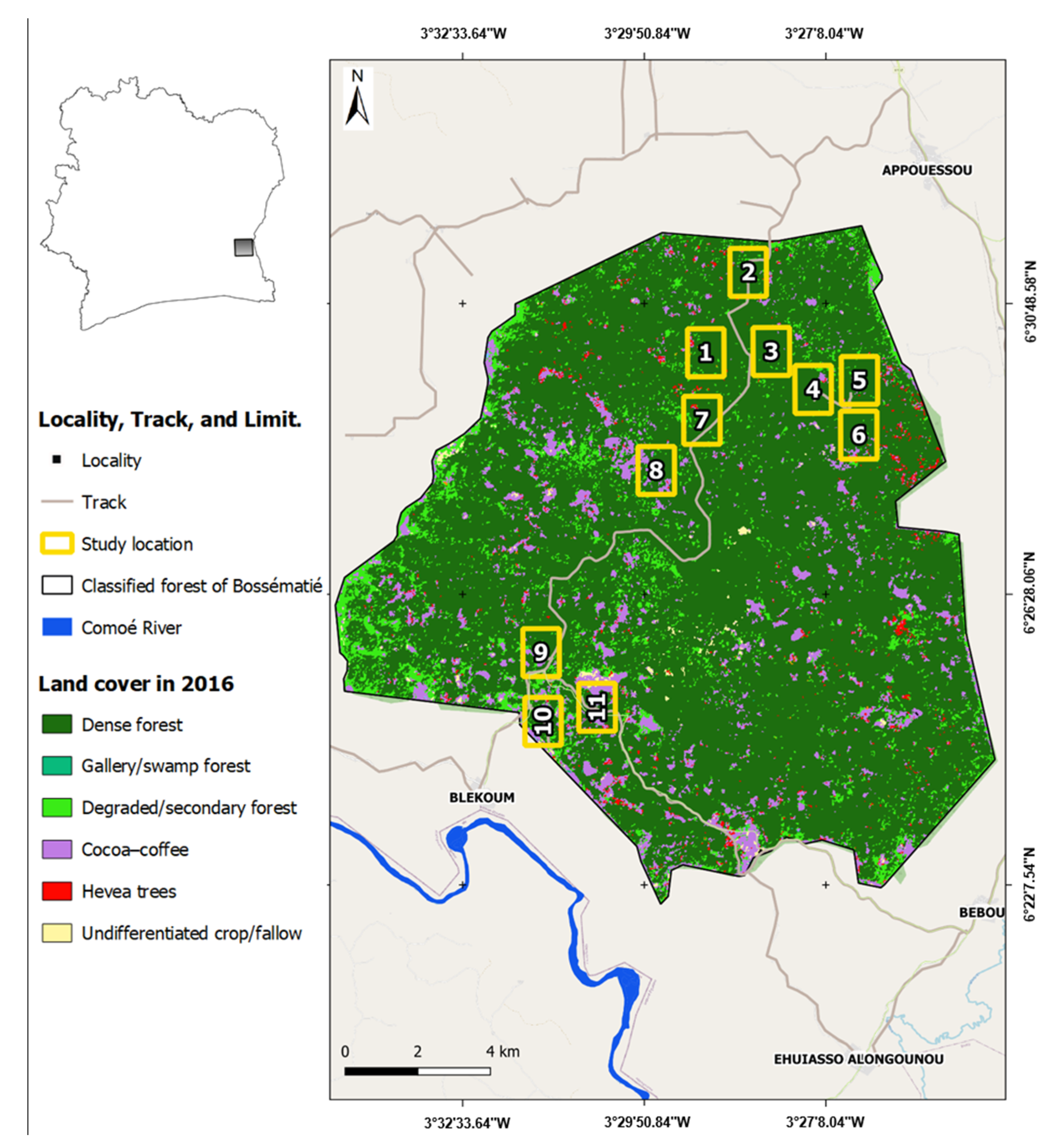
2.1. Study Area
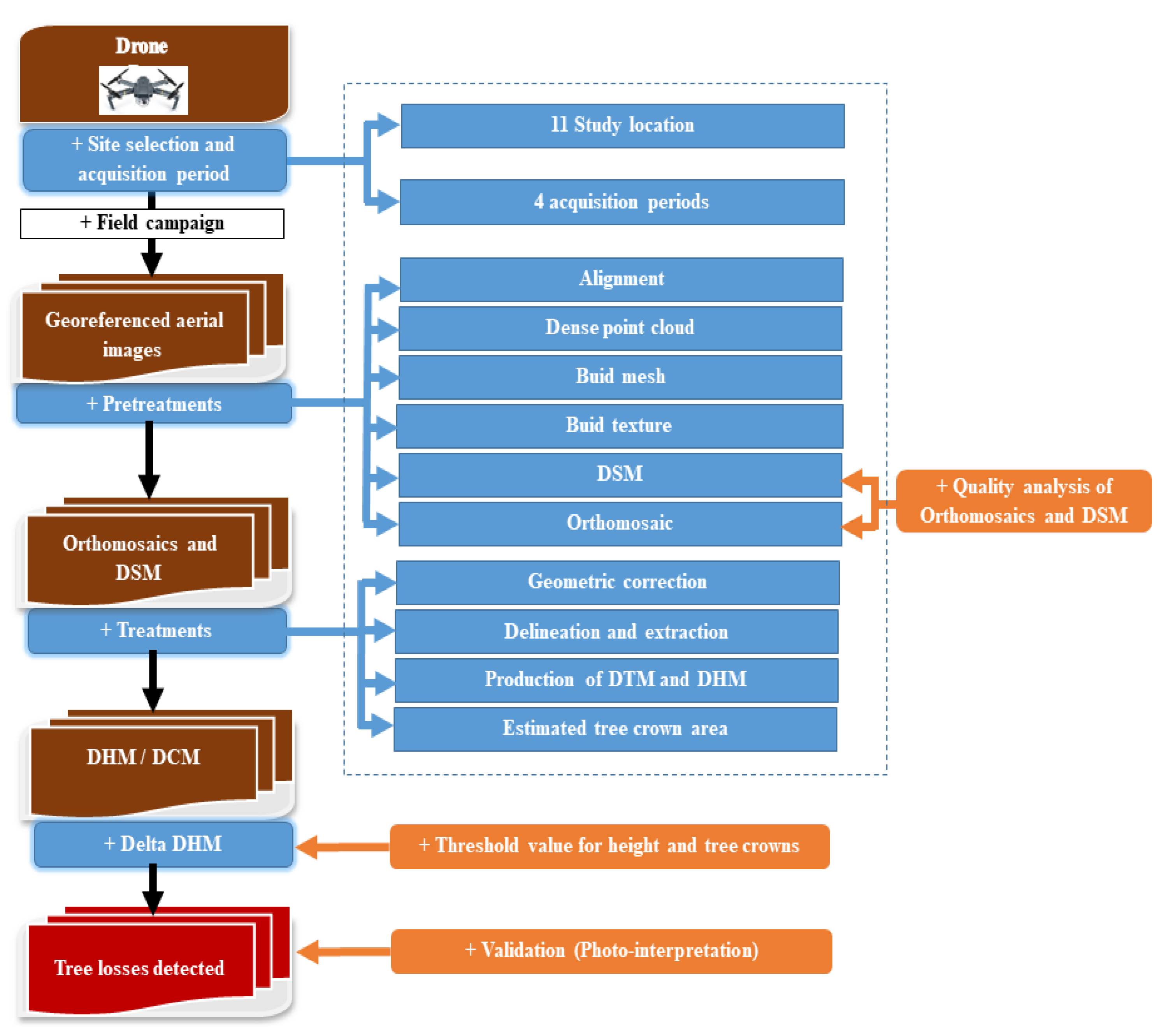
2.2. Overall Methodology
2.2.1. Sampling Plan
2.2.2. Drone Used for Image Acquisition
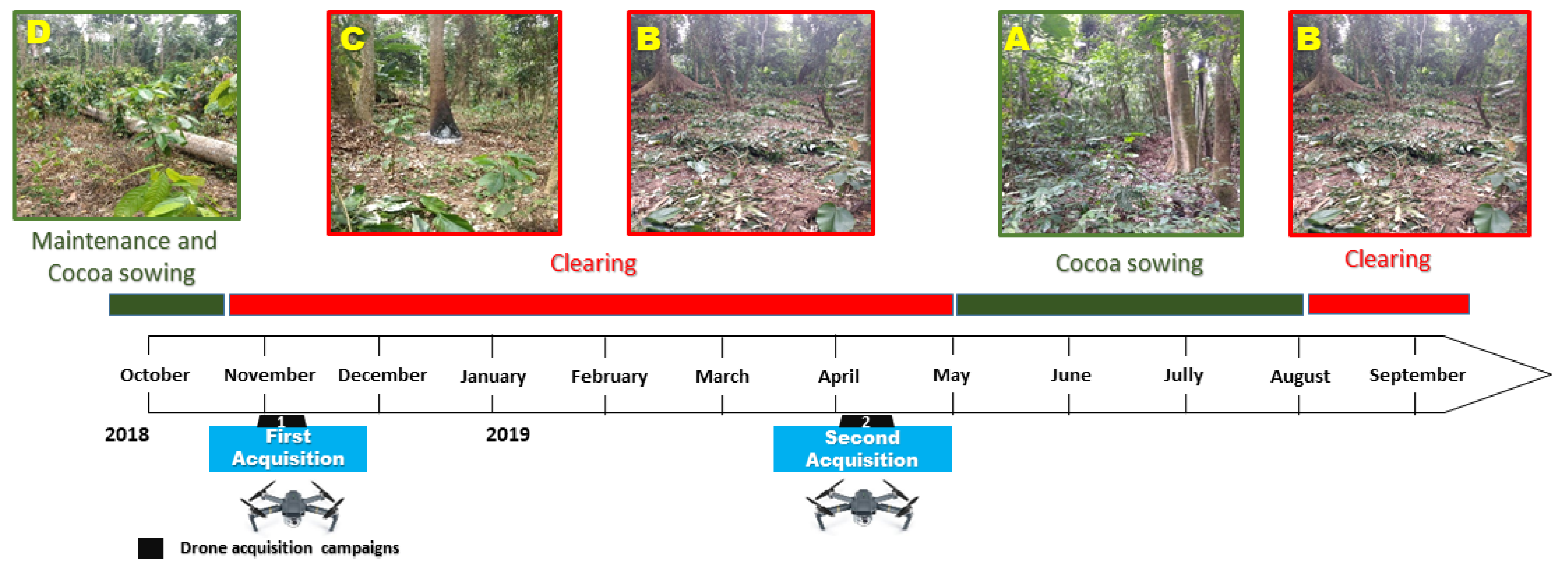
2.2.3. Acquisition of Aerial Images by Drone
2.2.4. Orthomosaic and Digital Surface Model Production
2.2.5. Geometric Corrections
2.2.6. Study Site Portion Delineation and Extraction
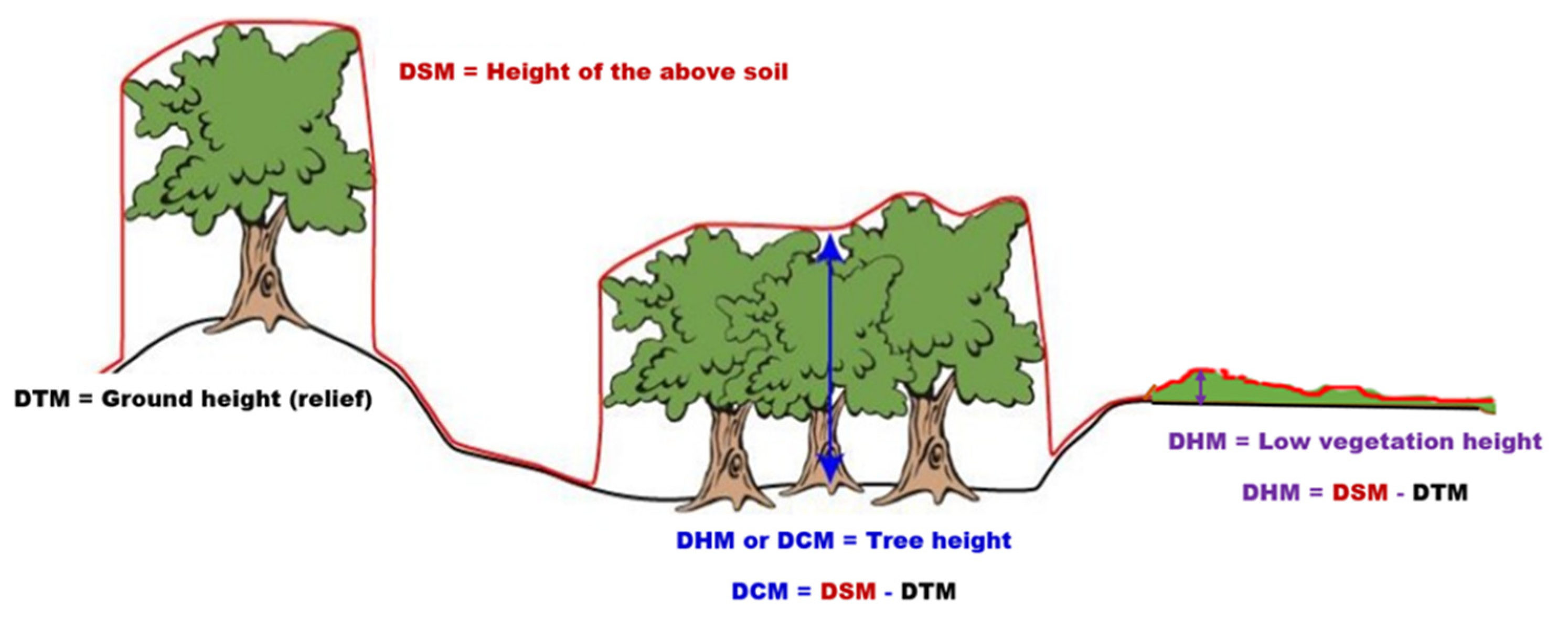
2.2.7. Digital Terrain Model Production
2.2.8. Generation of Digital Tree Height and Canopy Models
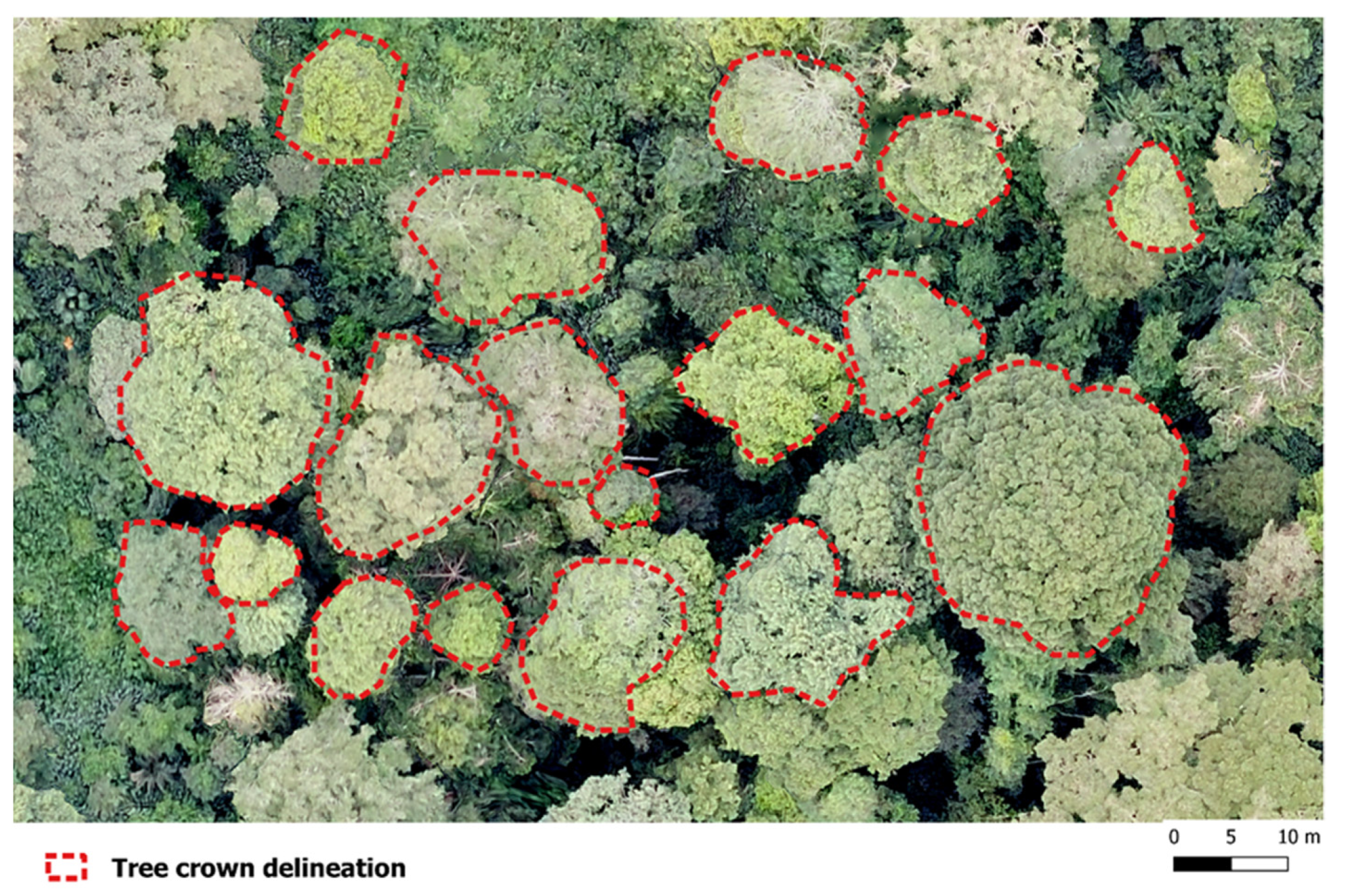
2.2.9. Estimation of Tree Crown Area
2.2.10. Tree Loss Detection and Validation
3. Results
3.1. Quality of Photogrammetric Processing
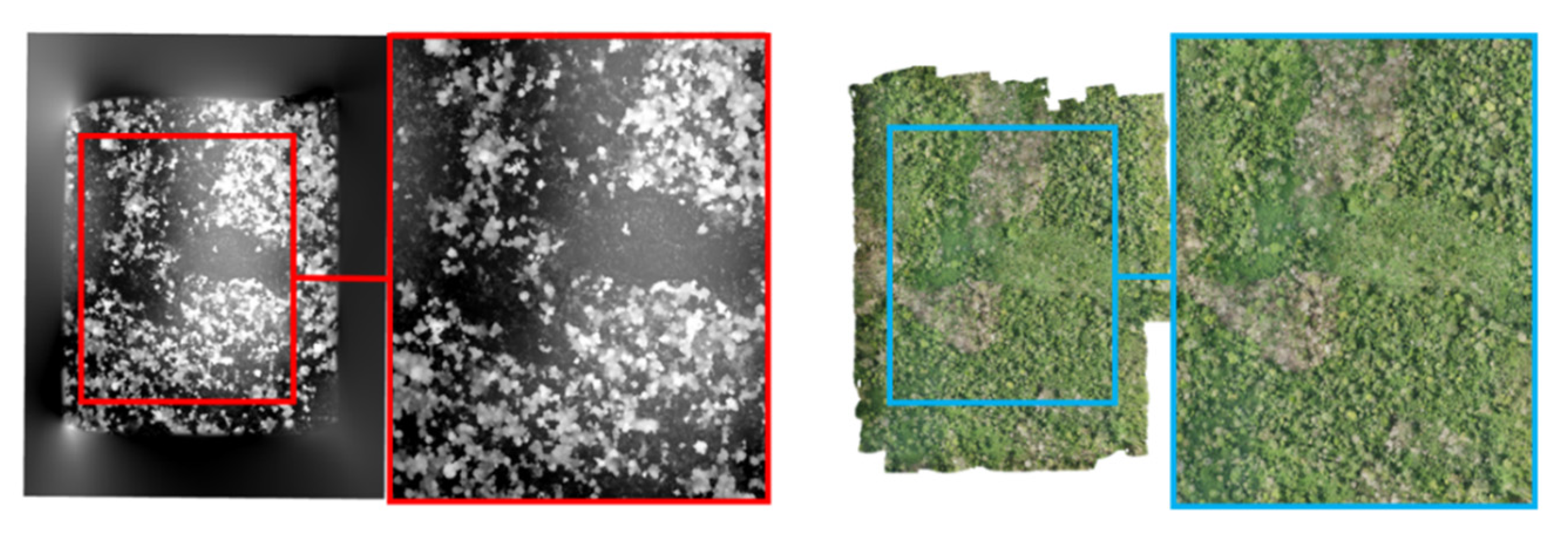
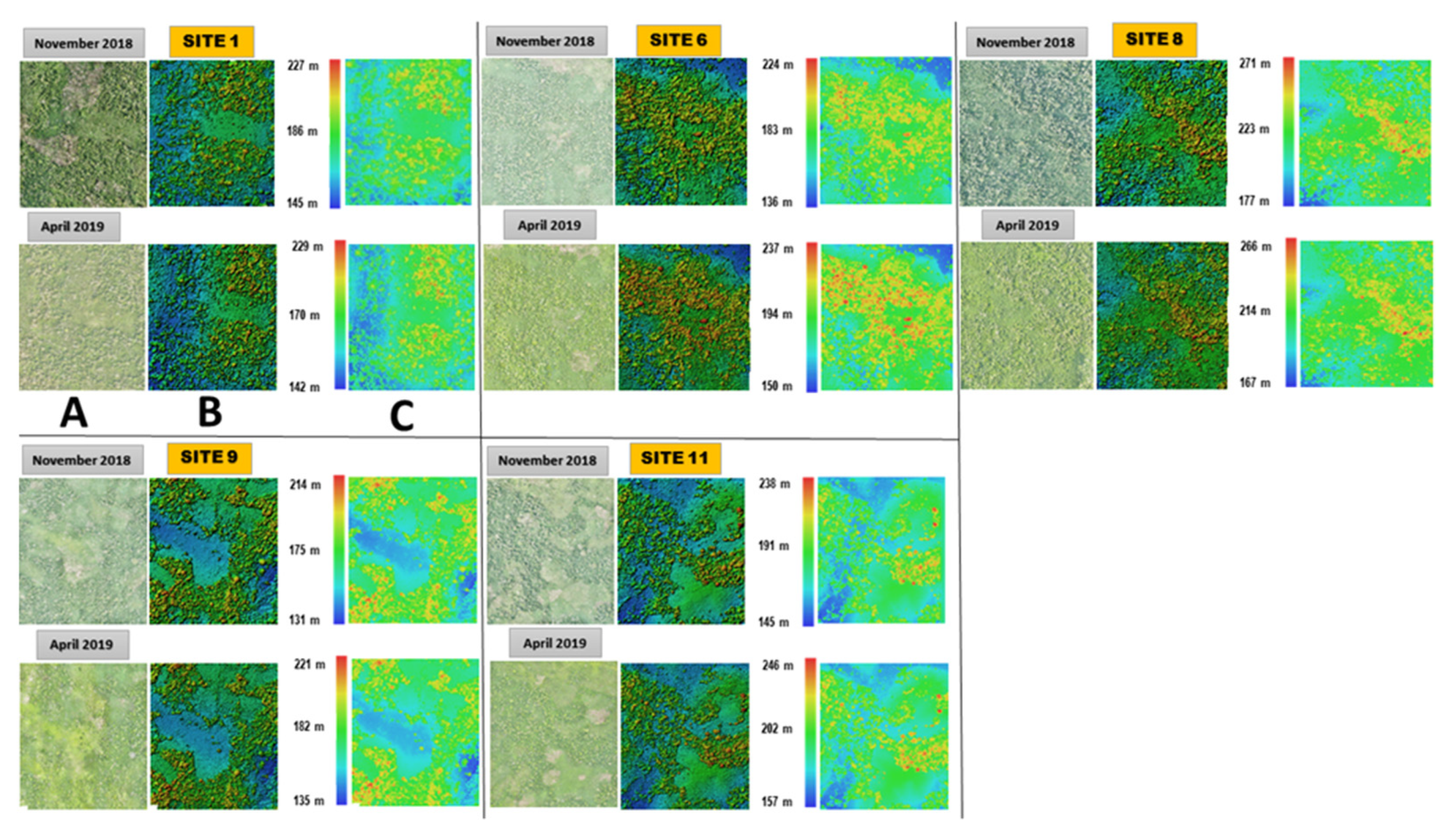
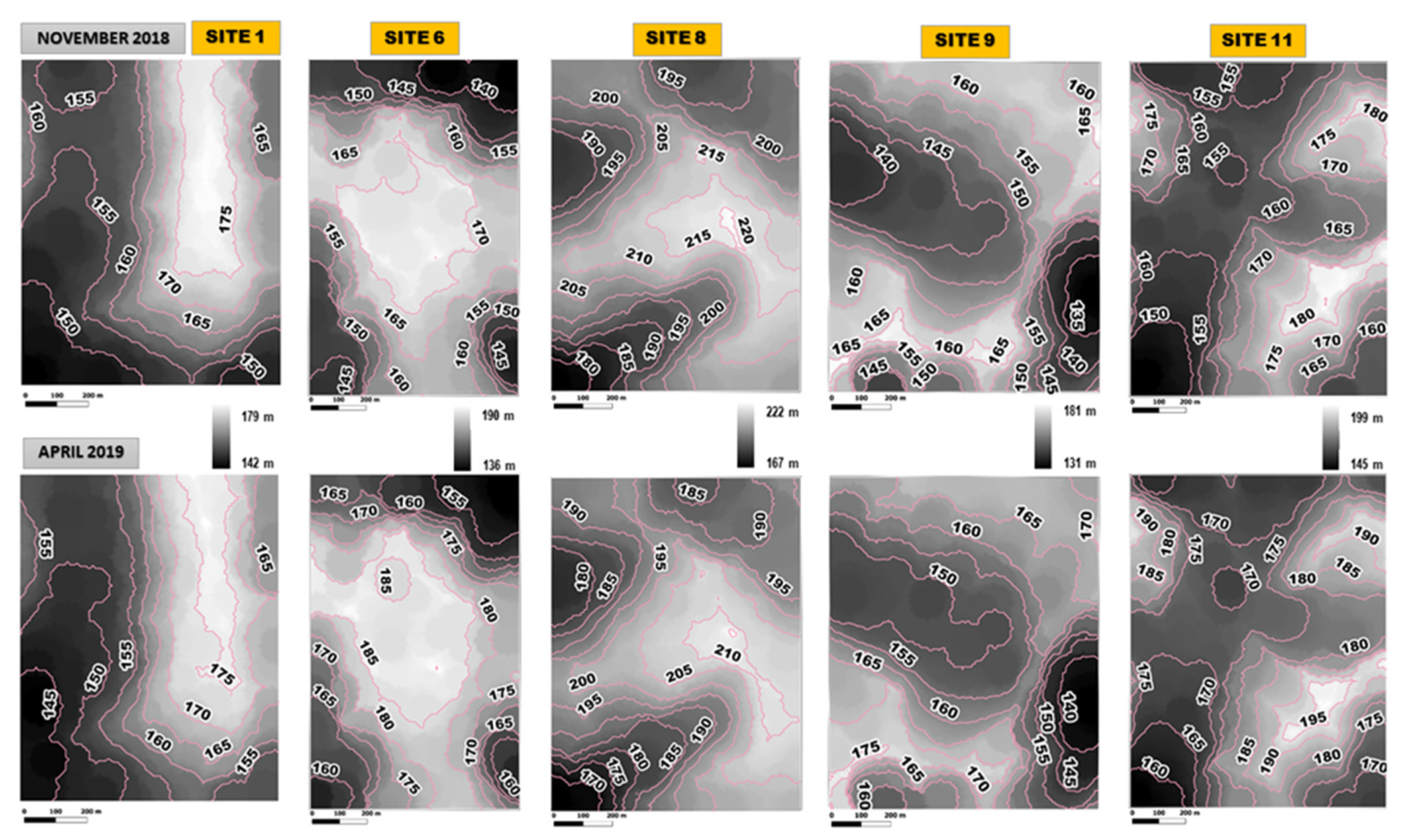
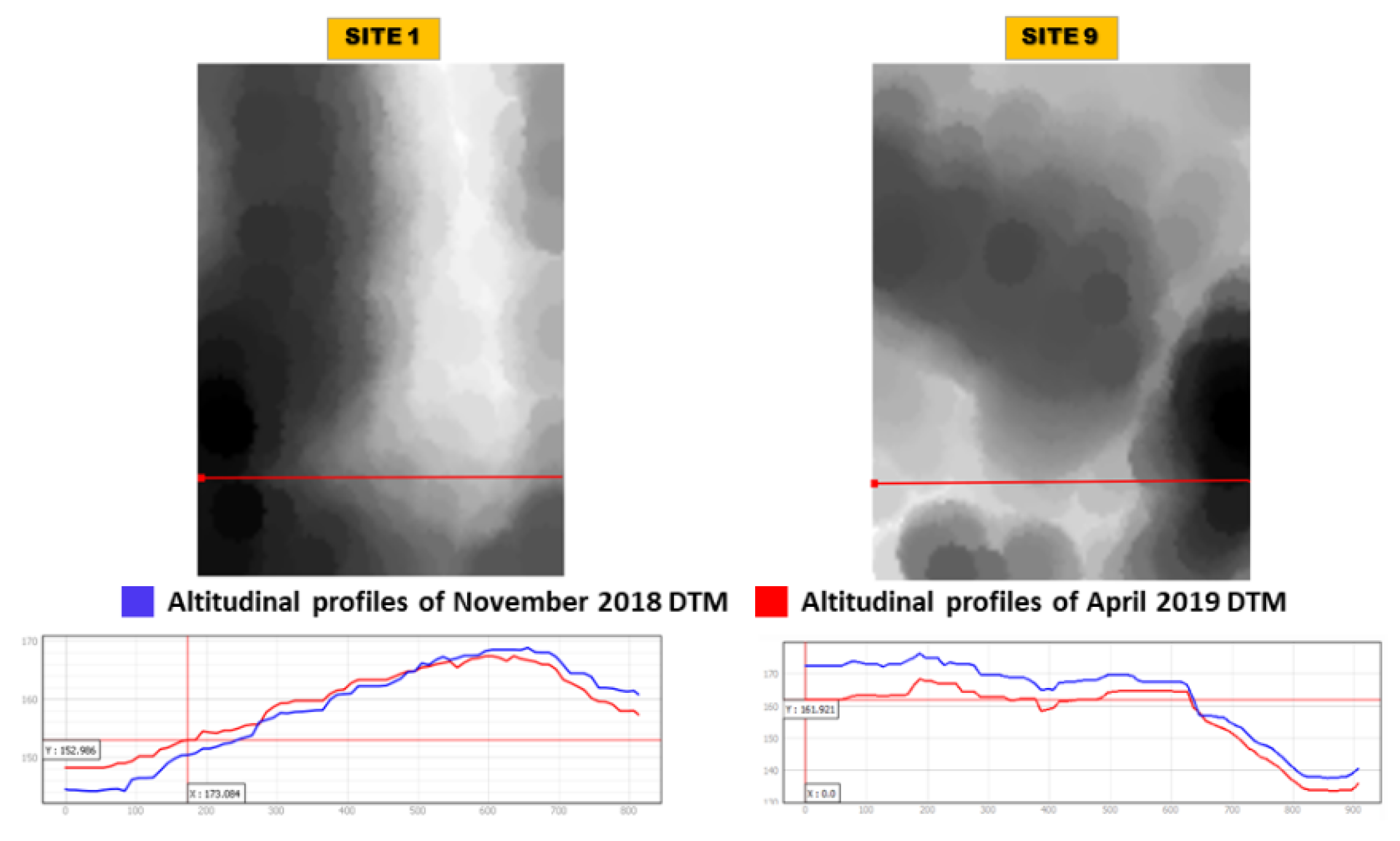
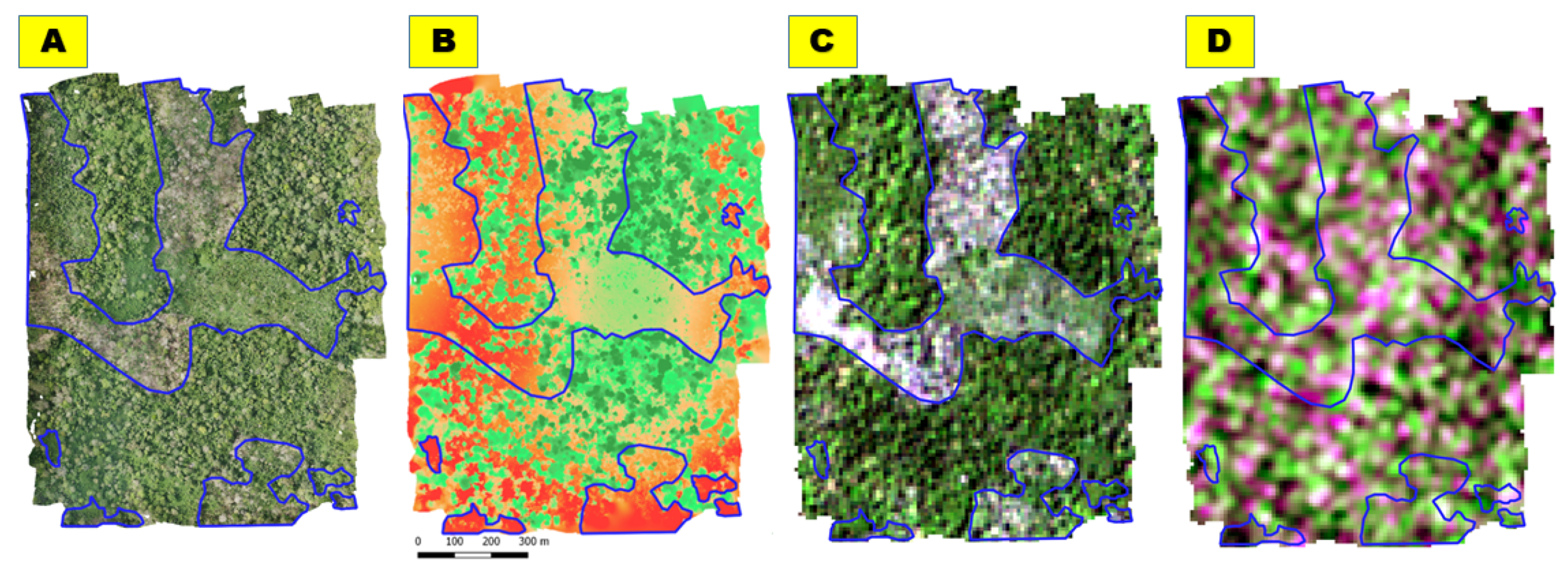
3.2. Orthomosaics, Digital Surface Models, and Digital Terrain Models
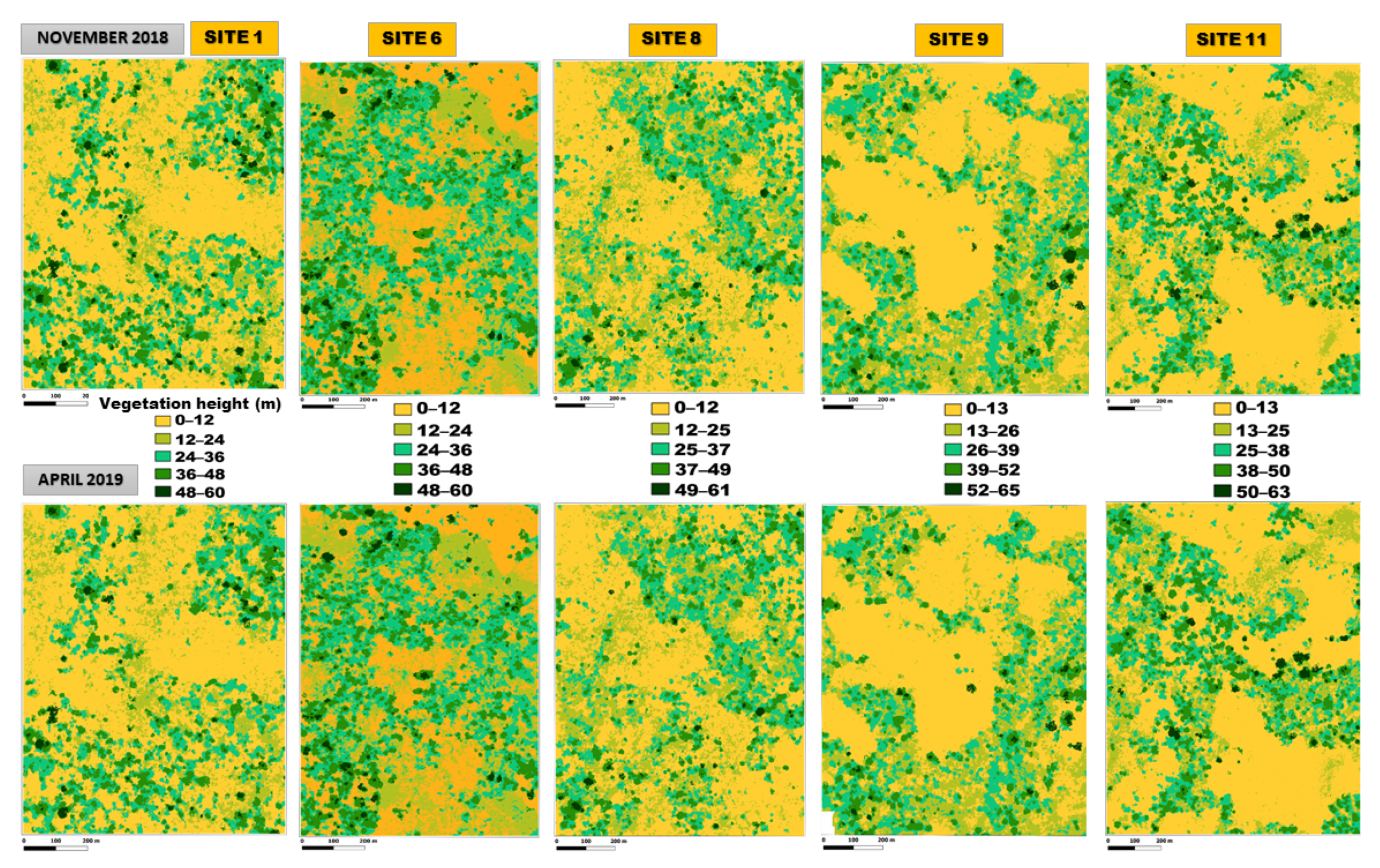
3.3. Distribution of Vegetation Heights
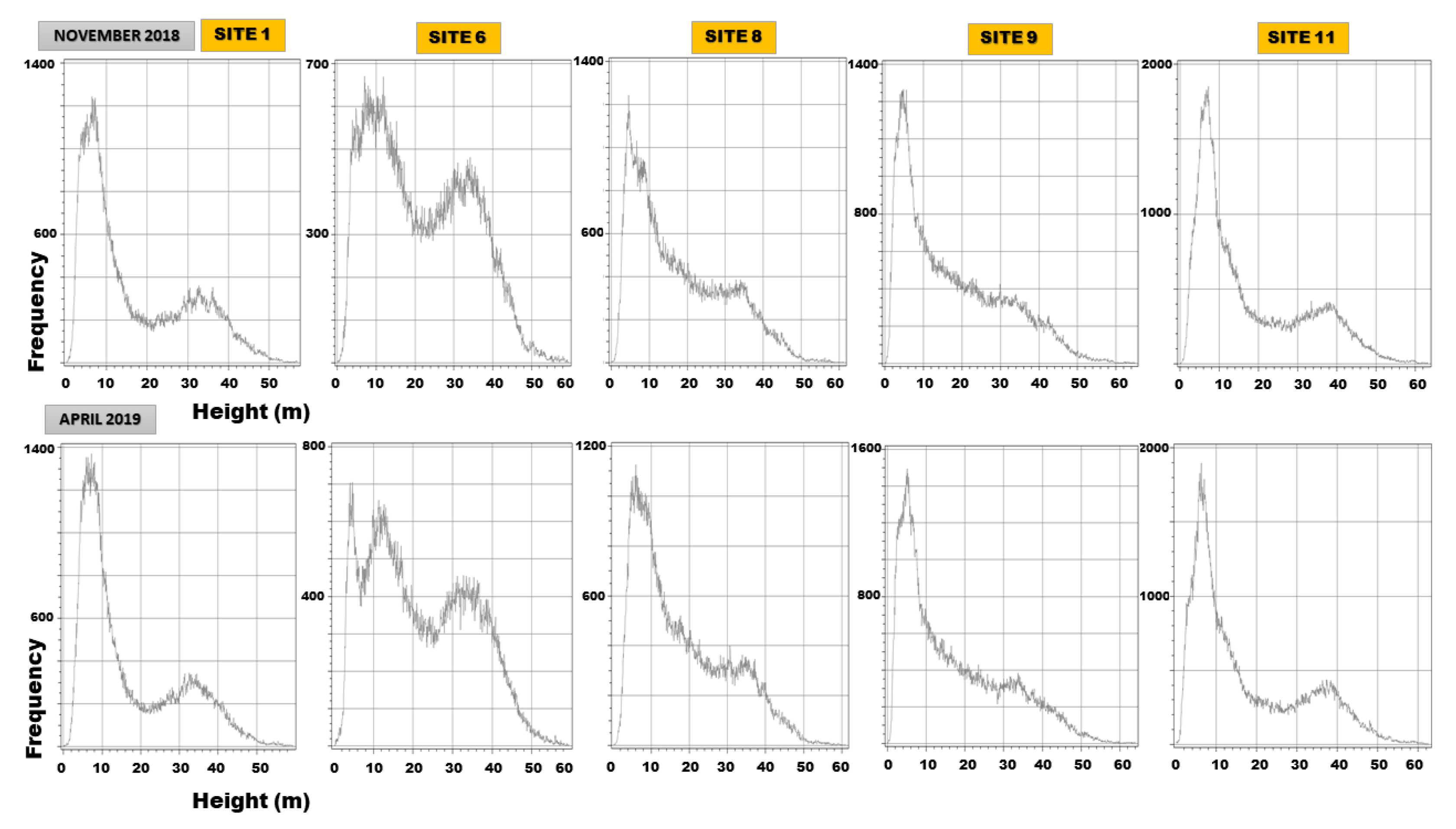
3.4. Distribution of Tree Heights
3.5. Tree Crown Area
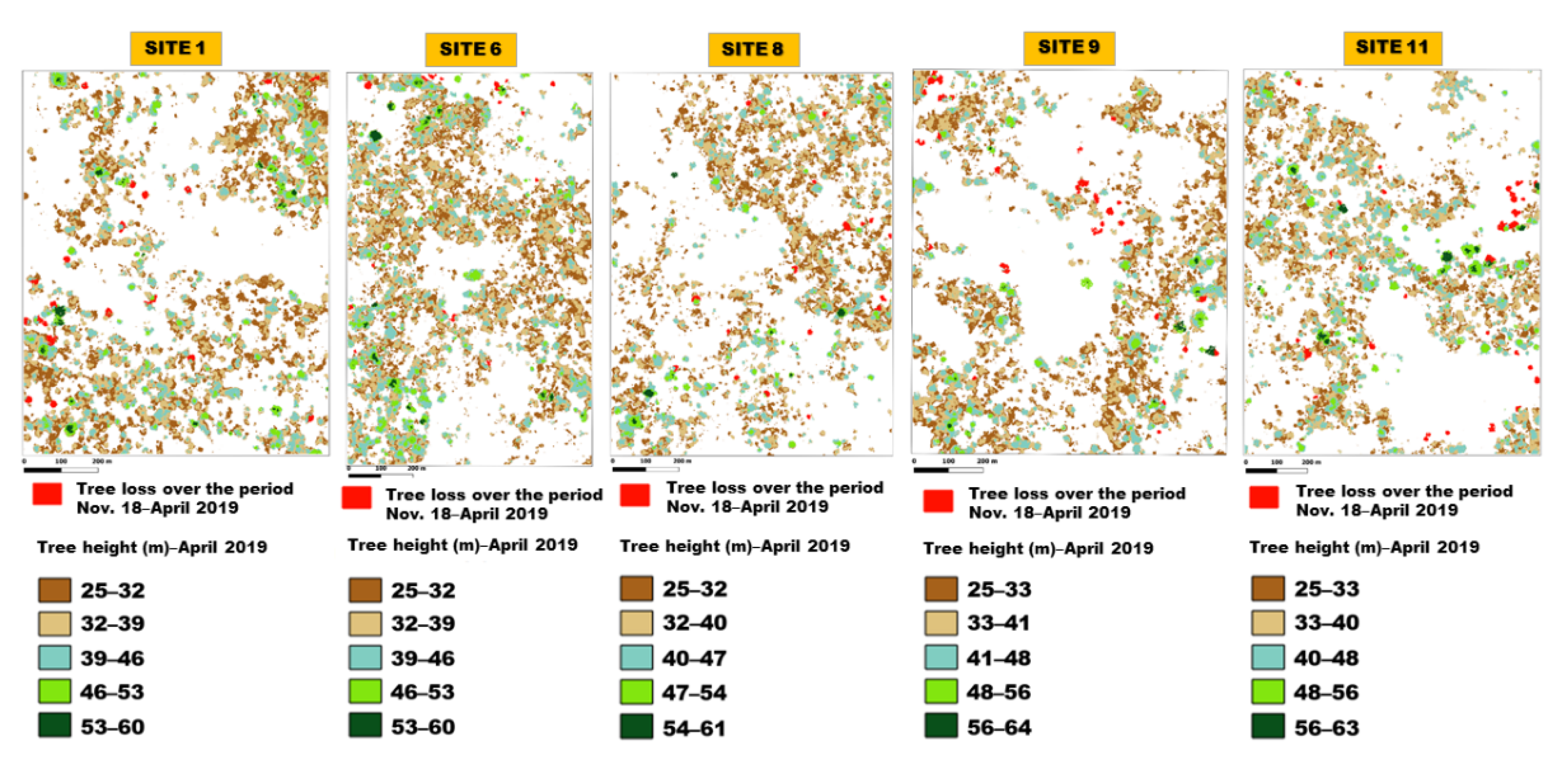
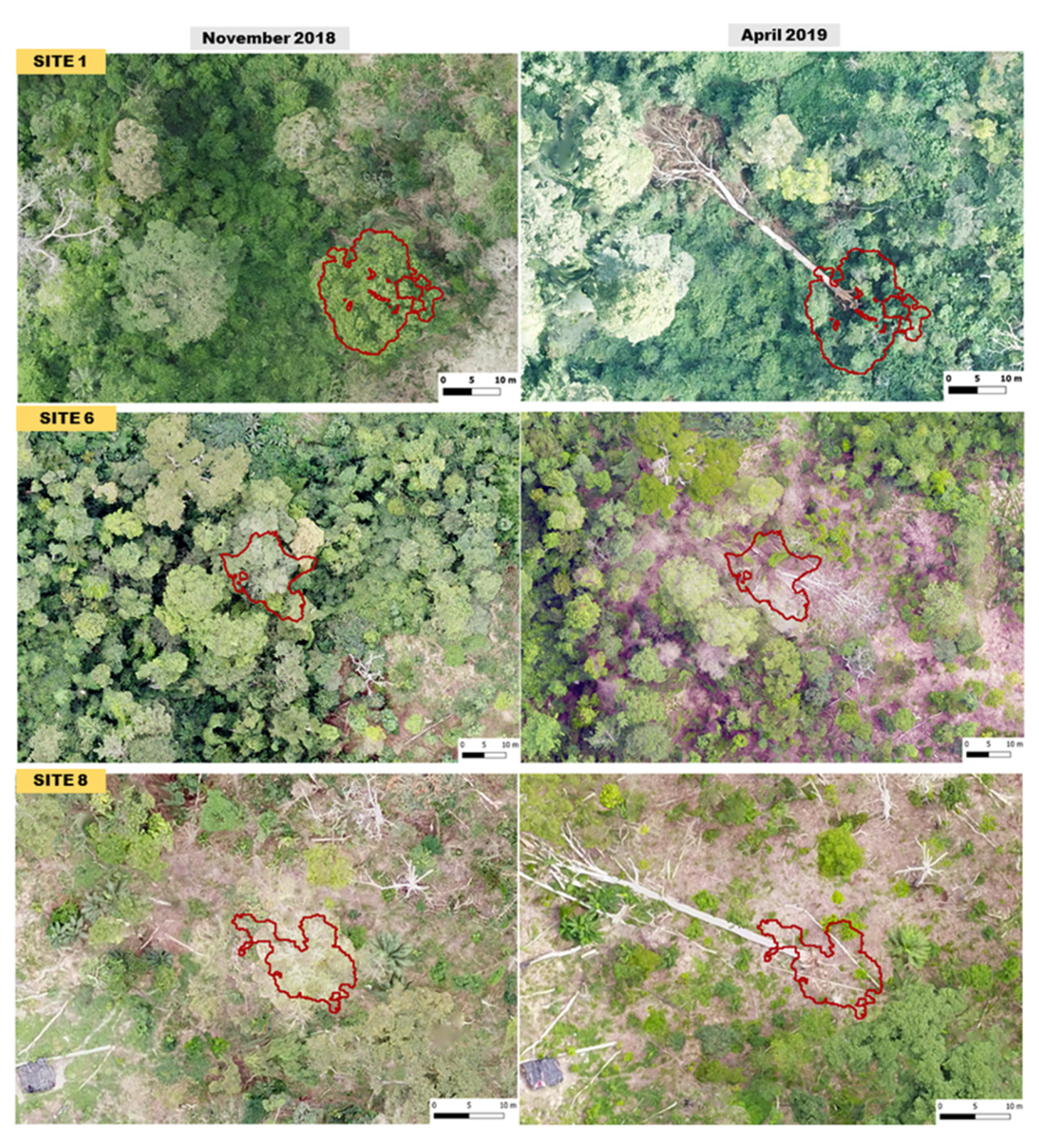
3.6. Detection of Tree Losses by Difference in Vegetation Heights
3.7. Quality Assessment of Maps
4. Discussion
4.1. Clearing Timing in Classified Forests and Data Acquisition Strategy
4.2. Quality of Photogrammetric Models and Maps
4.3. Advantages and Methodological Limitations
4.4. Drone versus Sentinel Sensors and Perspectives
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- CIRAD. Mémento du Forestier; Ministère de la Coopération et du Développement: Paris, France, 1999; 1168p. [Google Scholar]
- FAO. Global Forest Resource Assessment; Main Report; FAO: Rome, Italy, 2010; 341p. [Google Scholar]
- BNETD. Analyse Quantitative de la Déforestation en Côte d’Ivoire Sur Les Périodes 1986–2000–2015; BNETD: Abidjan, Côte d’Ivoire, 2016; pp. 8–37. [Google Scholar]
- Ministry of Water and Forests. Stratégie Nationale de Préservation, de Réhabilitation et D’extension des Forêts; MINEF: Abidjan, Côte d’Ivoire, 2019; pp. 10–68. [Google Scholar]
- Ministry of Water and Forests. Forest Policy Statement; MINEF: Abidjan, Côte d’Ivoire, 2017; pp. 1–6. [Google Scholar]
- Oszwald, J. Dynamique des Formations Agroforestières en Côte d’Ivoire (des Années 1980 aux Années 2000). Ph.D. Thesis, Université des Sciences et Technologies de Lille, France, Lille, 2005. [Google Scholar]
- Zhang, K. Identification of gaps in mangrove forests with airbome LIDAR. Remote Sens. Environ. 2008, 112, 2309–2325. [Google Scholar] [CrossRef]
- Grinand, C.; Rakotomalala, F.; Gond, V.; Vaudry, R.; Bernoux, M.; Vieilledent, G. Estimating deforestation in tropical humid and dry forests in Madagascar from 2000 to 2010 using multidate Landsat satellite images and the random forests classifier. Remote Sens. Environ. 2013, 139, 68–80. [Google Scholar] [CrossRef]
- Rakotomalala, F.A.; Rabenandrasana, J.C.; Andriambahiny, J.E.; Rajaonson, R.; Andriamalala, F.; Buren, C.; Rakotoarijaona, J.R.; Parany, B.L.E.; Vaudry, R.; Rakotoniaina, S.; et al. Estimation de la déforestation des forêts humides à Madagascar utilisant une classification multidates d’images Landsat entre 2005, 2010 et 2013. Rev. Française Photogrammétrie Télédétection 2015, 1, 11–23. [Google Scholar]
- Grinand, C.; Vieilledent, G.; Razafimbelo, T.; Rakotoarijaona, J.-R.; Nourtier, M.; Bernoux, M. Landscape-scale spatial modelling of deforestation, land degradation, and regeneration using machine learning tools. Land Degrad. Dev. 2019, 31, 1699–1712. [Google Scholar] [CrossRef]
- Jofack Sokeng, V.C.; Akpa, Y.L.; Assoma, T.V.; Kouamé, K.F.; Corgne, S.; Rudant, J.P.; Ouattara, T.A.; Sorho, F.M.; Yao, N.; Kouamé, P. Suivi par télédétection des affectations des terres pour la promotion d’une agriculture intégrée au développement forestier en Côte d’Ivoire. In Proceedings of the Conférence OSFACO: Des Images Satellites Pour la Gestion Durable des Territoires en Afrique, Cotonou, Bénin, 13–15 March 2019; 17p. Available online: https://hal.archives-ouvertes.fr/hal-02189403 (accessed on 7 February 2022).
- Ouattara, T.A.; Kouamé, K.F.; Zo-Bi, I.C.; Vaudry, R.; Grinand, C. Changements d’occupation et d’usage des terres entre 2016 et 2019 dans le Sud-Est de la Côte d’Ivoire: Impact des cultures de rente sur la forêt. Bois Trop. 2021, 347, 89–104. [Google Scholar] [CrossRef]
- Nakouma, S.; Beltrando, G.; Atta, K.L.; Dibi, H.N.; Brou, T. Dynamique forestière et pression urbaine dans le parc national du Banco (Abidjan, Côte d’Ivoire). VertigO 2013, 13, 2. [Google Scholar] [CrossRef]
- Barima, Y.S.S.; Kouakou, A.T.M.; Bamba, I.; Sangne, Y.C.; Godron, M.; Andrieu, J.; Bogaert, J. Cocoa crops are destroying the forest reserves of the classified Forest of Haut Sassandra (Ivory Coast). Glob. Ecol. Conserv. 2016, 8, 85–98. [Google Scholar] [CrossRef]
- Phiri, D.; Simwanda, M.; Salekin, S.; Nyirenda, V.R.; Murayama, Y.; Ranagalage, M. Sentinel-2 Data for Land Cover/Use Mapping: A Review. Remote Sens. 2020, 12, 2291. [Google Scholar] [CrossRef]
- Puliti, S.; Ole Orka, H.; Gobakken, T.; Naesset, E. Inventory of Small Forest Areas Using Unmanned Aerial System. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef]
- Shahbazi, M.; Théau, J.; Ménard, P. Recent applications of unmanned aerial imagery in natural resource management. GIScience Remote Sens. 2014, 51, 339–365. [Google Scholar] [CrossRef]
- Rango, A.; Laliberte, A.; Herrick, J.E.; Winters, C.; Havstad, K.; Steele, C.; Browning, D. Unmanned aerial vehicle-based remote sensing for rangeland assessment monitoring and management. J. Appl. Remote Sens. 2009, 3, 033542. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Jeffrey, E.H.; Rango, A.; Winters, C. Acquisition, orthorectification and object-based classification of unmanned aerial vehicle (UAV) imagery for rangeland monitoring. Photogramm. Eng. Remote Sens. 2010, 76, 661–672. [Google Scholar] [CrossRef]
- Getzin, S.; Wiegand, K.; Schöning, I. Assessing biodiversity in forests using very high-resolution images and unmanned aerial vehicles. Methods Ecol. Evol. 2012, 3, 397–404. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; Martinez-de-Dios, J.R.; Maza, I.; Ollero, A. An unmanned aircraft system for automatic forest fire monitoring and measurement. J. Intell. Robot. Syst. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Puttock, A.K.; Cunliffe, A.M.; Anderson, K.; Brazier, R.E. Aerial photography collected with a multirotor drone reveals impact of Eurosian beaver reintroduction on ecosystem structure. J. Unmanned Veh. Syst. 2015, 3, 123–130. [Google Scholar] [CrossRef]
- Faye, E.; Rebaudo, F.; Yánez-Cajo, D.; Cauvy-Fraunié, S.; Dangles, O. A toolbox for studying thermal heterogeneity across spatial scales: From unmanned aerial vehicle imagery to landscape metrics. Methods Ecol. Evol. 2015, 7, 437–446. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Serrano, N.; Arquero, O.; Peña, J.M. High-troughput 3-D monitoring of agricultural-tree plantations with unmanned aerial vehicle (UAV) technology. PLoS ONE 2015, 10, e013079. [Google Scholar] [CrossRef]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UAS) the future of wildlife monitoring? A review of the accomplishments and challenges. Mammal Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Koh, L.P.; Wich, S.A. Dawn of drone ecology: Low-cost autonomous aerial vehicles for conservation. Trop. Conserv. Sci. 2012, 5, 121–132. [Google Scholar] [CrossRef]
- Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small drones for Community-Based Forest Monitoring: An assessment of their feasibity and potential in tropical areas. Forests 2014, 5, 1481–1507. [Google Scholar] [CrossRef]
- Semeki, N.J.; Linchant, J.; Quevauvillers, S.; Kahindo, M.J.-P.; Lejeune, P.; Vermeulen, C. Cartographie de la dynamique de terroirs villageois à l’aide d’un drone dans les aires protégées de la République Démocratique du Congo. Bois Trop. 2016, 330, 69–83. [Google Scholar] [CrossRef]
- Kakaes, K.; Greenwood, F.; Lippincott, M.; Meier, P.; Wich, S. Drones and Aerial Observation: New Technologies for Property Rights, Human Rights, and Global Development. A Primer; New America: Washington, DC, USA, 2015; pp. 1–104. [Google Scholar]
- Guillaumet, J.L.; Adjanohoun, E. La végétation de la Côte d’Ivoire. In Le Milieu Naturel de la Côte D’ivoire; Avenard, J.M., Eldin, E., Girad, G., Sircoulon, J., Touchebeuf, P., Guillaumet, J.L., Adjanohoun, E., Perraud, A., Eds.; ORSTOM: Paris, France, 1971; pp. 161–262. [Google Scholar]
- Kouadio, K.; Kouassi, K.E.; Kouamé, N.F.; Traoré, D. Impact de l’éclaircie sur la régénération naturelle des essences principales, dans la forêt classée de Bossématié (Côte d’Ivoire). Sci. Nat. 2007, 4, 27–35. [Google Scholar] [CrossRef][Green Version]
- Semeki, N.J.; Linchant, J.; Quevauvillers, S.; Kahindo, M.J.-P.; Lejeune, P.; Vermeulen, C. Une méthode simple et rapide pour l’évaluation de statistiques d’occupation du sol à l’aide d’images à très haute résolution acquises par mini-drone. Bois Trop. 2018, 335, 15–23. [Google Scholar] [CrossRef]
- Agisoft Photoscan. Manuel de L’utilisateur Agisoft Photoscan Professional Edition, Version 1.4; Agisoft LLC: St. Petersburg, Russia, 2018. [Google Scholar]
- Lisein, J.; Bonnet, S.; Lejeune, P.; Pierrot-Deseilligny, M. Modélisation de la canopée forestière par photogrammétrie depuis des images acquises par drone. Rev. Française Photogrammétrie Télédétection 2014, 206, 45–54. [Google Scholar] [CrossRef]
- Piney, I. Comparaison de Protocoles de Caractérisation des Trouées de la Canopée sur des Séries Temporelles de Photos Aériennes: Application à la Caractérisation du Régime de Perturbation. Master’s Thesis, Université Paul Verlaine de Metz, Metz, France, 2010. [Google Scholar]
- Rameau, J.C.; Mansion, D.; Dumé, G. Flore forestière française: Guide écologique illustré—1 Plaines et collines. In IDF et Ministère de L’agriculture et de la Forêt; Institut Pour le Développement Forestier Éditeur: Paris, France, 1989. [Google Scholar]
- Tu, Y.-H.; Phinn, S.; Johansen, K.; Robson, A.; Wu, D. Optimising drone flight planning for measuring horticultural tree crop structure. ISPRS J. Photogramm. Remote Sens. 2020, 160, 83–96. [Google Scholar] [CrossRef]
- Gülci, S.; Akgül, M.; Akay, A.E.; Tas, I. Using ready-to Drone images in forestry activities: Case Study of CINARPINAR in Kahramanmaras, Turkey. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-4/W6, 51–53. [Google Scholar] [CrossRef]
- Wu, J.; Zhongkui, D.; Zhigang, L.; Guoqing, Z. Geo-registration and mosaic of UAV video for quick-response to forest fire disaster. In Proceedings of the SPIE, MIPPR 2007: Pattern Recognition and Computer Vision, Wuhan, China, 15 November 2007; Volume 6788, p. 678810. [Google Scholar]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Processes Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Gülci, S.; Akay, A.E.; Gülci, N.; Tas, I. An assesment of conventional and drone-based measurements for tree attributes in timber volume estimation: A case study on stone pine plantation. Ecol. Inform. 2021, 63, 101303. [Google Scholar] [CrossRef]
- Landis, R.J.; Koch, G.G. An Application of Hierarchical Kappa-type Statistics in the Assesment of Majority Agreement among Multiple Observers. Biometrics 1977, 33, 363–374. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, N.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, Aircraft and satellite Remote Sensing Platforms for Precision Viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef]
- Nagendra, H.; Mairota, P.; Marangi, C.; Lucas, R.; Dimopouluos, P.; Honrado, J.P.; Niphadkar, M.; Mücher, C.A.; Tomaselli, V.; Panitsa, M.; et al. Satellite Earth observation data to identify anthropogenic pressures in selected protected areas. Int. J. Appl. Earth Obs. Geoinf. 2015, 37, 124–132. [Google Scholar] [CrossRef]
- Rao, P.; Zhou, W.; Bhattarai, N.; Srivastava, A.K.; Singh, B.; Poonia, S.; Lobell, D.B.; Jain, M. Using Sentinel-1, Sentinel-2, and Planet Imagery to Map Crop Type of Smallholder Farms. Remote Sens. 2021, 13, 1870. [Google Scholar] [CrossRef]
- Fayad, I.; Baghdadi, N.; Bailly, J.-S.; Barbier, N.; Gond, V.; Hajj, M.E.; Fabre, F.; Bourgine, B. Canopy Height Estimation in French Guiana with LiDAR ICESat/GLAS Data Using Principal Component Analysis and Random Forest Regressions. Remote Sens. 2014, 6, 11883–11914. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site Name | Acquisition Dates | Types of Land Use and Land Cover in 2016 (ha) | Area (ha) | Level of Deforestation and Degradation | |||
|---|---|---|---|---|---|---|---|
| Acquisition 1 | Acquisition 2 | Dense Forest Formation | Degraded Forest | Crops | |||
| Site 1 | 01-Nov-18 | 09-Apr-19 | 120.8 | 5.7 | 4.5 | 131 | 8% |
| Site 2 | 01-Nov-18 | 09-Apr 19 | 117.3 | 10.5 | 3.2 | 131 | 10% |
| Site 3 | 01-Nov-18 | 09-Apr-19 | 128.7 | 1.8 | 0.4 | 131 | 2% |
| Site 4 | 02-Nov-18 | 10-Apr-19 | 122.2 | 4.8 | 4.9 | 132 | 7% |
| Site 5 | 03-Nov-18 | 12-Apr-19 | 122.6 | 3.6 | 3.5 | 130 | 5% |
| Site 6 | 03-Nov-18 | 12-Apr-19 | 117.2 | 2.3 | 11.6 | 131 | 11% |
| Site 7 | 03-Nov-18 | 10-Apr-19 | 124.1 | 5.8 | 2.13 | 132 | 6% |
| Site 8 | 03-Nov-18 | 10-Apr-19 | 94.9 | 4.7 | 31.4 | 131 | 28% |
| Site 9 | 04-Nov-18 | 11-Apr-19 | 101.6 | 14.3 | 15.1 | 131 | 22% |
| Site 10 | 04-Nov-18 | 11-Apr-19 | 76.99 | 20.8 | 31.9 | 130 | 41% |
| Site 11 | 04-Nov-18 | 11-Apr-19 | 86.4 | 4.7 | 39.8 | 131 | 34% |
| Name | November 2018 | April 2019 | ||||
|---|---|---|---|---|---|---|
| Quality | A | E | Quality | A | E | |
| Site 1 | Good | 100 | 0.580 | Good | 97 | 0.551 |
| Site 2 | Good | 100 | 0.718 | Poor | 100 | 0.739 |
| Site 3 | Poor | 100 | 0.738 | Good | 100 | 0.717 |
| Site 4 | Poor | 69 | 0.636 | Poor | 73 | 0.646 |
| Site 5 | Good | 95 | 0.689 | Poor | 59 | 0.653 |
| Site 6 | Good | 100 | 0.799 | Good | 100 | 0.625 |
| Site 7 | Good | 97 | 0.626 | Poor | 75 | 0.622 |
| Site 8 | Good | 100 | 0.648 | Good | 100 | 0.649 |
| Site 9 | Good | 98 | 0.655 | Good | 98 | 0.599 |
| Site 10 | Poor | 100 | 0.680 | Good | 100 | 0.649 |
| Site 11 | Good | 100 | 0.614 | Good | 100 | 0.615 |
| Name | November 2018 | April 2019 | ||||
|---|---|---|---|---|---|---|
| Maximum Height (m) | Average (m) | Standard Deviation (m) | Maximum Height (m) | Average (m) | Standard Deviation (m) | |
| Site 1 | 57.05 | 16.72 | 12.73 | 59.52 | 16.89 | 12.59 |
| Site 6 | 59.59 | 21.74 | 12.63 | 59.62 | 22.15 | 12.76 |
| Site 8 | 61.29 | 17.96 | 12.15 | 61.16 | 18.18 | 12.06 |
| Site 9 | 65.06 | 17.51 | 13.12 | 64.07 | 17.07 | 13.10 |
| Site 11 | 63.41 | 17.75 | 13.66 | 62.69 | 17.56 | 13.66 |
| Name | November 2018 | April 2019 | ||||
|---|---|---|---|---|---|---|
| Maximum Height (m) | Average (m) | Standard Deviation (m) | Maximum Height (m) | Average (m) | Standard Deviation (m) | |
| Site 1 | 57.05 | 34.83 | 6.04 | 59.52 | 35.30 | 6.34 |
| Site 6 | 59.59 | 34.92 | 6.26 | 59.62 | 35.38 | 6.38 |
| Site 8 | 61.29 | 34.29 | 6.27 | 61.16 | 34.63 | 6.40 |
| Site 9 | 65.06 | 35.43 | 7.21 | 64,07 | 35.55 | 7.15 |
| Site 11 | 63.41 | 37.00 | 7.14 | 62.69 | 36.88 | 7.05 |
| Name | Number of Polygons | Minimum Area (m2) | Maximum Area (m2) | Average Surface Area (m2) |
|---|---|---|---|---|
| Site 1 | 22 | 26 | 373 | 166 |
| Site 6 | 31 | 23 | 451 | 127 |
| Site 8 | 20 | 7 | 487 | 164 |
| Site 9 | 27 | 12 | 385 | 113 |
| Site 11 | 24 | 25 | 838 | 206 |
| Tree Loss | StableForest | NonstableForest | Total | User’s Accuracy | CommissionError | |
|---|---|---|---|---|---|---|
| Tree loss | 99 | 5 | 3 | 107 | 0.93 | 0.007 |
| Stable forest | 1 | 196 | 3 | 200 | 0.98 | 0.02 |
| Nonstable forest | 1 | 2 | 201 | 204 | 0.99 | 0.01 |
| Total | 101 | 203 | 207 | 511 | ||
| Producer’s accuracy | 0.98 | 0.97 | 0.97 | OA = 97% | ||
| Omission error | 0.02 | 0.03 | 0.03 | Kappa = 0.95 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouattara, T.A.; Sokeng, V.-C.J.; Zo-Bi, I.C.; Kouamé, K.F.; Grinand, C.; Vaudry, R. Detection of Forest Tree Losses in Côte d’Ivoire Using Drone Aerial Images. Drones 2022, 6, 83. https://doi.org/10.3390/drones6040083
Ouattara TA, Sokeng V-CJ, Zo-Bi IC, Kouamé KF, Grinand C, Vaudry R. Detection of Forest Tree Losses in Côte d’Ivoire Using Drone Aerial Images. Drones. 2022; 6(4):83. https://doi.org/10.3390/drones6040083
Chicago/Turabian StyleOuattara, Tiodionwa Abdoulaye, Valère-Carin Jofack Sokeng, Irié Casimir Zo-Bi, Koffi Fernand Kouamé, Clovis Grinand, and Romuald Vaudry. 2022. "Detection of Forest Tree Losses in Côte d’Ivoire Using Drone Aerial Images" Drones 6, no. 4: 83. https://doi.org/10.3390/drones6040083
APA StyleOuattara, T. A., Sokeng, V.-C. J., Zo-Bi, I. C., Kouamé, K. F., Grinand, C., & Vaudry, R. (2022). Detection of Forest Tree Losses in Côte d’Ivoire Using Drone Aerial Images. Drones, 6(4), 83. https://doi.org/10.3390/drones6040083