
Automatic Tuning and Turbulence Mitigation for Fixed-Wing UAV with Segmented Control Surfaces

 ,
,  ,
,
Abstract
1. Introduction
- 1.
- A robust roll attitude control system of the fixed-wing UAV with multiple aileron segments is designed utilizing autotuning methodology. At first, this UAV is subjected to the process of system identification via relay instrument to acquire frequency response points. The process of system identification from scratch is thorough as it captures not only the complex system’s actual dynamics, but also those which might impact the closed-loop operation of control system such as computation delays, sensors, and actuators. Afterward, the acquired frequency points are directly used to design and autotune the PID controllers based on simplistic sensitivity functions and beta values as discussed later on. The suggested autotuning methodology is straightforward and does not require any prior information on the plant;
- 2.
- In order to efficiently deal with the complexity of the system, the proposed control system is designed to have cascade. As discussed later on, unique controllers are handling the actuation of the inner and outer aileron segments through a cascade control system by considering each aileron pair as an independently manipulated variable. Moreover, a novel error-threshold control technique is proposed and incorporated to firmly reject the severe turbulence and other external disturbances. The experimental results have shown that such method of the controller tuning and multiple aileron control leads to highly stable and pleasant flight.
- 3.
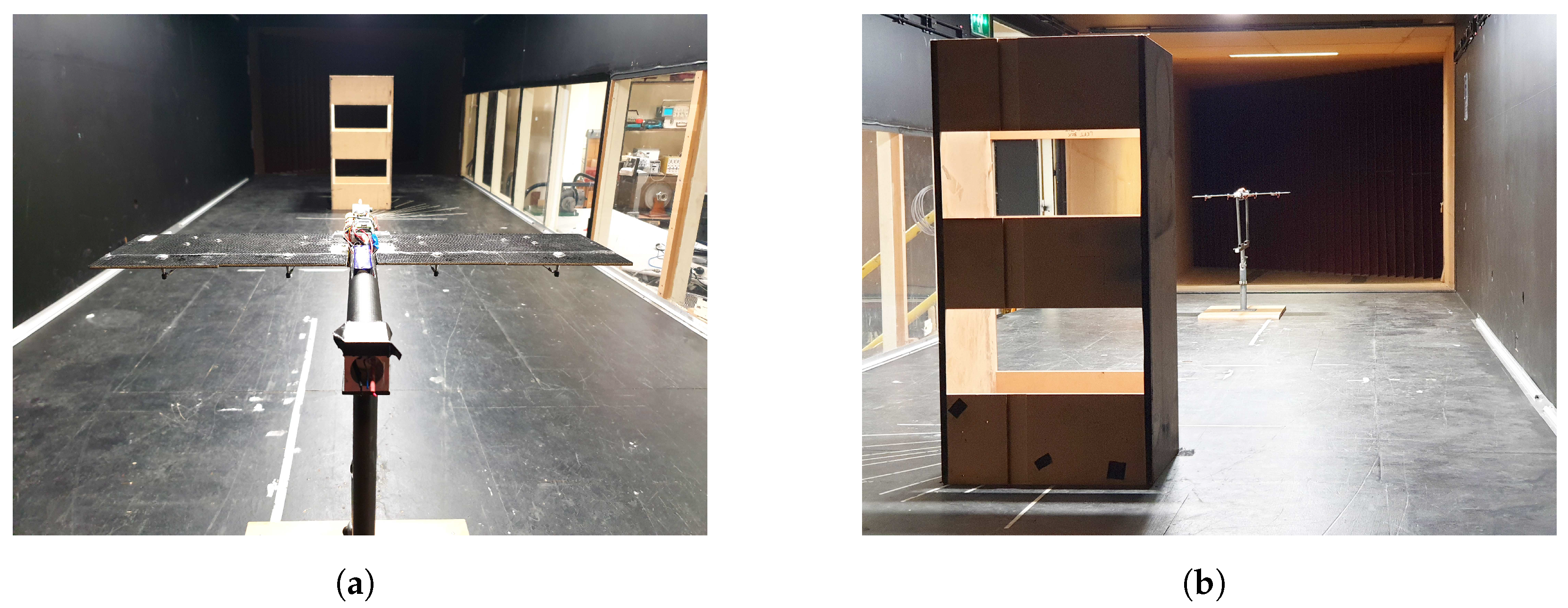
- A complete hardware of the fixed-wing UAV with multiple aileron segments along with a custom flight control board is designed to test and validate the efficacy of the autotuing methodology and multi-segment design against turbulence mitigation. All the experiments documented in this work we performed in a professional wind tunnel environment situated in RMIT University. The acquired results demonstrate that the fixed-wing UAV with multiple aileron segments can easily perform in-flight switching between a conventional and multi-segmented UAV, whereas asserting that the multi-segment configuration exhibits stronger disturbance rejection characteristics during a hostile flight environment.
2. Aircraft Structure and Mathematical Model
2.1. Specifications of the Aircraft with Multiple Control Surfaces
2.2. Control Hardware
2.3. Experimental Setup
2.4. Mathematical Model for Conventional Fixed-Wing Aircraft
3. System Dynamics and Controller Design Using Two Frequency Points
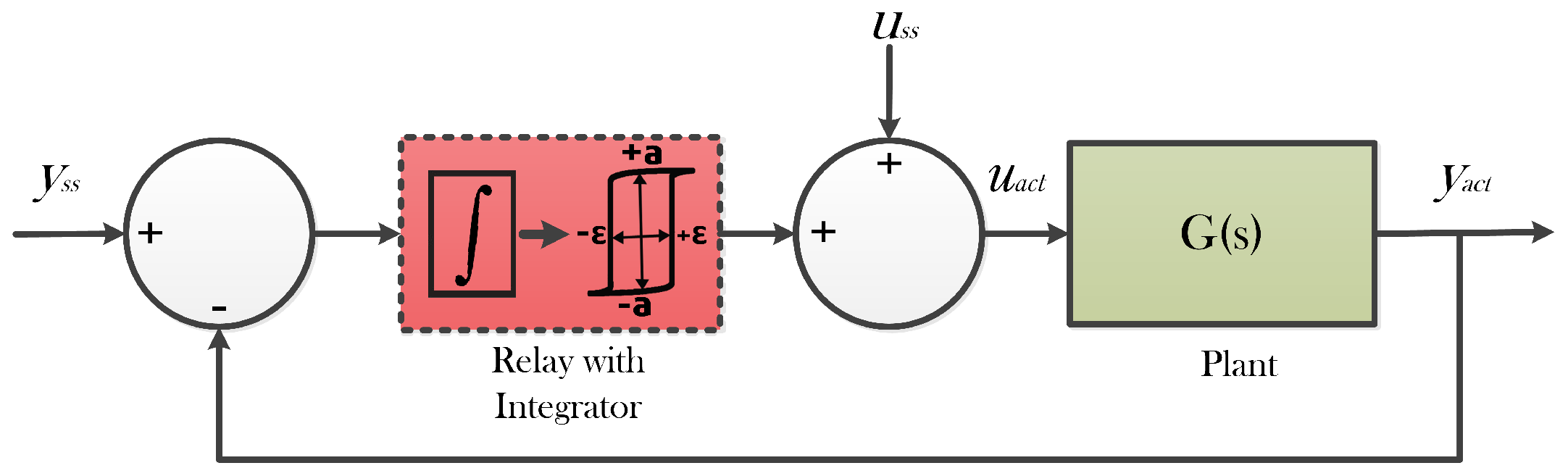
3.1. Relay with Integrator-Based System Identification
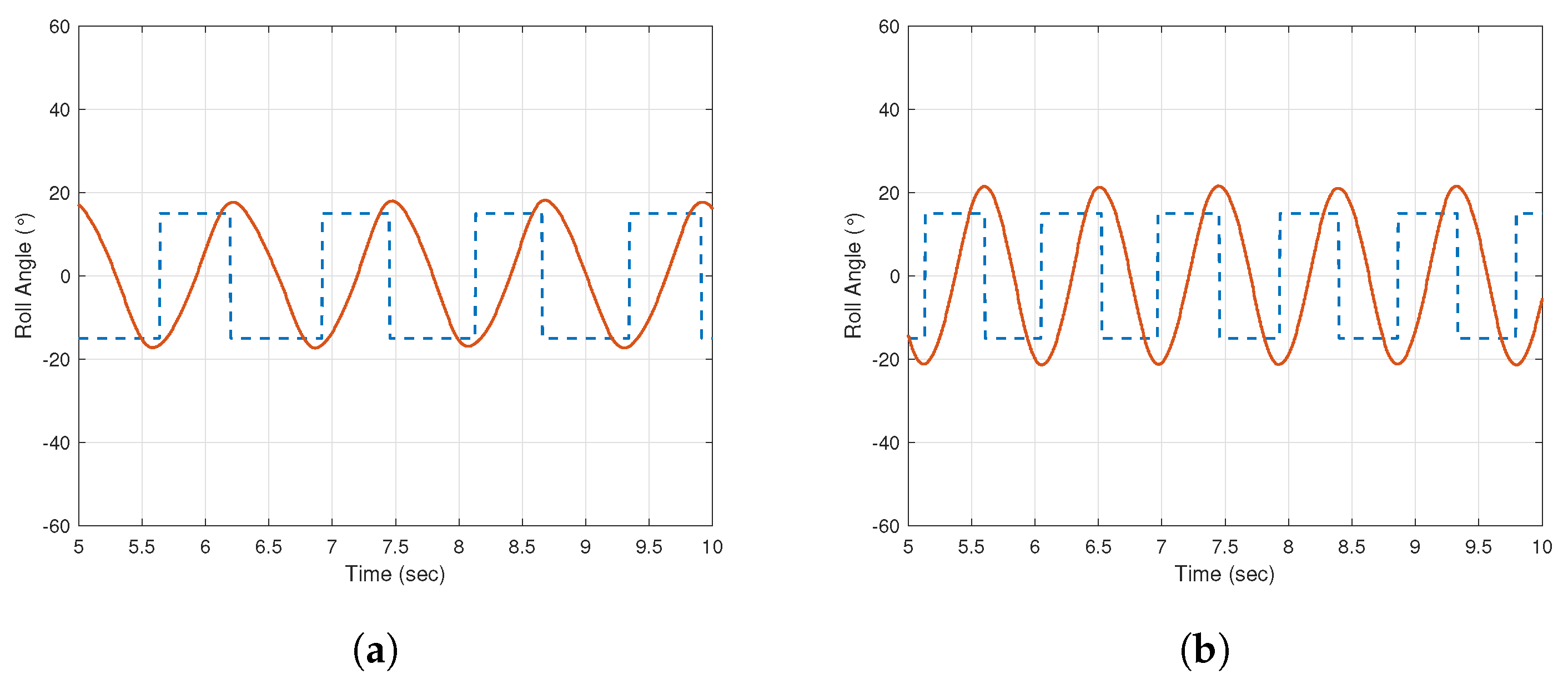
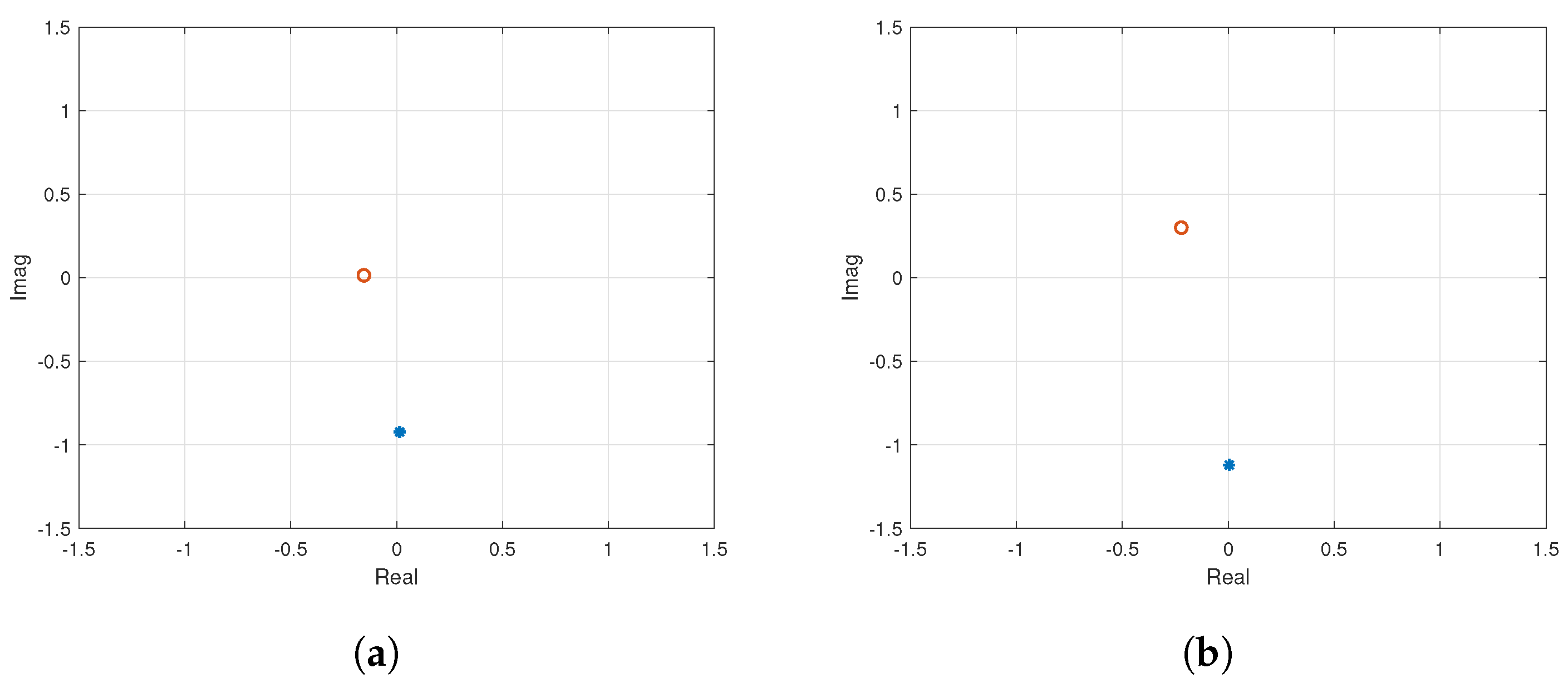
3.2. Relay Response Data Analysis Using FSF
3.3. Automatic Tuning of PID Controller
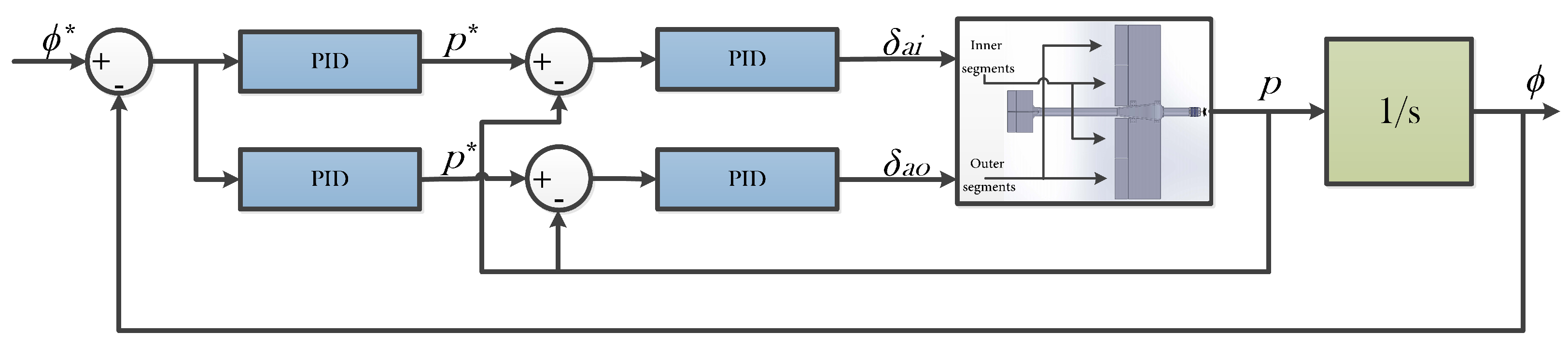
4. Cascade Control System for Roll Attitude Control
4.1. Inner Loop Controller Development
4.2. Outer Loop Controller Development
5. Hardware Validation of Autotuned Controllers in Cascade System
5.1. Performance Evaluation: Inner Aileron Segments
5.2. Performance Evaluation: Outer Aileron Segments
6. The Error-Threshold-Based Approach to Control of Segmented Surfaces
7. Conclusions and Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cobleigh, B.R. Ikhana: A NASA UAS Supporting Long Duration Earth Science Missions; Technical Report, NASA TM-2007-214614; NASA Dryden Flight Research Center: Edwards, CA, USA, 2007.
- Logan, M.; Chu, J.; Motter, M.; Carter, D.; Ol, M.; Zeune, C. Small UAV research and evolution in long endurance electric powered vehicles. In Proceedings of the AIAA Infotech@ Aerospace 2007 Conference and Exhibit, Rohnert Park, NV, USA, 7–10 May 2007; p. 2730. [Google Scholar]
- Hernandez-Toral, J.L.; González-Hernández, I.; Lozano, R. Sun Tracking Technique Applied to a Solar Unmanned Aerial Vehicle. Drones 2019, 3, 51. [Google Scholar] [CrossRef]
- Ackerman, E.; Koziol, M. The blood is here: Zipline’s medical delivery drones are changing the game in Rwanda. IEEE Spectrum 2019, 56, 24–31. [Google Scholar] [CrossRef]
- Oakey, A.; Waters, T.; Zhu, W.; Royall, P.G.; Cherrett, T.; Courtney, P.; Majoe, D.; Jelev, N. Quantifying the Effects of Vibration on Medicines in Transit Caused by Fixed-Wing and Multi-Copter Drones. Drones 2021, 5, 22. [Google Scholar] [CrossRef]
- Beard, R.W.; Kingston, D.; Quigley, M.; Snyder, D.; Christiansen, R.; Johnson, W.; McLain, T.; Goodrich, M. Autonomous vehicle technologies for small fixed-wing UAVs. J. Aerosp. Comput. Inf. Commun. 2005, 2, 92–108. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Mohamed, A.; Clothier, R.; Palmer, J.; Simic, M.; Watkins, S. Enabling technologies for autonomous MAV operations. Prog. Aerosp. Sci. 2017, 91, 27–52. [Google Scholar] [CrossRef]
- Sun, J.; Tang, J.; Lao, S. Collision avoidance for cooperative UAVs with optimized artificial potential field algorithm. IEEE Access 2017, 5, 18382–18390. [Google Scholar] [CrossRef]
- Yasin, J.N.; Mohamed, S.A.; Haghbayan, M.H.; Heikkonen, J.; Tenhunen, H.; Plosila, J. Unmanned aerial vehicles (uavs): Collision avoidance systems and approaches. IEEE Access 2020, 8, 105139–105155. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Gennaro, S.F.D.; Matese, A. Recent advances in Unmanned Aerial Vehicles forest remote sensing—A systematic review. Part II: Research applications. Forests 2021, 12, 397. [Google Scholar] [CrossRef]
- Muñoz, J.; López, B.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L.E. Coverage Strategy for Target Location in Marine Environments Using Fixed-Wing UAVs. Drones 2021, 5, 120. [Google Scholar] [CrossRef]
- Khan, S.K.; Naseem, U.; Sattar, A.; Waheed, N.; Mir, A.; Qazi, A.; Ismail, M. UAV-aided 5G Network in Suburban, Urban, Dense Urban, and High-rise Urban Environments. In Proceedings of the 2020 IEEE 19th International Symposium on Network Computing and Applications (NCA), Cambridge, MA, USA, 24–27 November 2020; pp. 1–4. [Google Scholar]
- Watkins, S.; Mohamed, A.; Fisher, A.; Clothier, R.; Carrese, R.; Fletcher, D.F. Towards autonomous MAV soaring in cities: CFD simulation, EFD measurement and flight trials. Int. J. Micro Air Veh. 2015, 7, 441–448. [Google Scholar] [CrossRef]
- White, C.; Lim, E.; Watkins, S.; Mohamed, A.; Thompson, M. A feasibility study of micro air vehicles soaring tall buildings. J. Wind. Eng. Ind. Aerodyn. 2012, 103, 41–49. [Google Scholar] [CrossRef]
- Mohamed, A.; Massey, K.; Watkins, S.; Clothier, R. The attitude control of fixed-wing MAVS in turbulent environments. Prog. Aerosp. Sci. 2014, 66, 37–48. [Google Scholar] [CrossRef]
- Mohamed, A.; Clothier, R.; Watkins, S.; Sabatini, R.; Abdulrahim, M. Fixed-wing MAV attitude stability in atmospheric turbulence, part 1: Suitability of conventional sensors. Prog. Aerosp. Sci. 2014, 70, 69–82. [Google Scholar] [CrossRef]
- Mohamed, A.; Watkins, S.; Clothier, R.; Abdulrahim, M.; Massey, K.; Sabatini, R. Fixed-wing MAV attitude stability in atmospheric turbulence—Part 2: Investigating biologically-inspired sensors. Prog. Aerosp. Sci. 2014, 71, 1–13. [Google Scholar] [CrossRef]
- Mohamed, A.; Abdulrahim, M.; Watkins, S.; Clothier, R. Development and flight testing of a turbulence mitigation system for micro air vehicles. J. Field Robot. 2016, 33, 639–660. [Google Scholar] [CrossRef]
- Abdulrahim, M. Flight dynamics and control of an aircraft with segmented control surfaces. In Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 5–8 January 2004; p. 128. [Google Scholar]
- Abdulrahim, M.; Lind, R. Investigating segmented trailing-edge surfaces for full authority control of a uav. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Austin, TX, USA, 11–14 August 2003; p. 5312. [Google Scholar]
- Boussalis, H.; Valavanis, K.; Guillaume, D.; Pena, F.; Diaz, E.U.; Alvarenga, J. Control of a simulated wing structure with multiple segmented control surfaces. In Proceedings of the 2013 21st Mediterranean Conference on Control and Automation (MED), Crete, Greece, 25–28 June 2013; pp. 501–506. [Google Scholar]
- Wu, M.; Shi, Z.; Xiao, T.; Ang, H. Energy optimization and investigation for Z-shaped sun-tracking morphing-wing solar-powered UAV. Aerosp. Sci. Technol. 2019, 91, 1–11. [Google Scholar] [CrossRef]
- Grant, D.; Abdulrahim, M.; Lind, R. Flight dynamics of a morphing aircraft utilizing independent multiple-joint wing sweep. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 6505. [Google Scholar]
- Ifju, P.; Albertani, R.; Stanford, B.; Claxton, D.; Sytsma, M. Flexible-Wing Micro Air Vehicles; Mueller, T.J., Kellog, J.C., Ifju, P.G., Shkarayev, E.S., Eds.; WIT Press: Southampton, UK, 2006. [Google Scholar]
- Ifju, P.; Waszak, M.; Jenkins, L. Stability and control properties of an aeroelastic fixed wing micro aerial vehicle. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Montreal, QC, Canada, 6–9 August 2001; p. 4005. [Google Scholar]
- Oduyela, A.; Slegers, N. Gust mitigation of micro air vehicles using passive articulated wings. Sci. World J. 2014, 2014, 598523. [Google Scholar] [CrossRef]
- Martinez, R.M. Design and Analysis of the Control and Stability of a Blended Wing Body Aircraft. Master’s Thesis, Royal Institute of Technology (KTH), Stockholm, Sweden, 2014. [Google Scholar]
- Zhao, A.; He, D.; Wen, D. Structural design and experimental verification of a novel split aileron wing. Aerosp. Sci. Technol. 2020, 98, 105635. [Google Scholar] [CrossRef]
- Pena, F.; Martins, B.L.; Richards, W.L. Active In-flight Load Redistribution Utilizing Fiber-Optic Shape Sensing and Multiple Control Surfaces. NASA/TM-2018-219741. 2018. Available online: https://www.researchgate.net/publication/342533774_Active_In-flight_Load_Redistribution_Utilizing_Fiber-Optic_Shape_Sensing_and_Multiple_Control_Surfaces (accessed on 7 September 2022).
- Lelaie, C. A380: Development of the flight controls Part: 1. In Safety First—The Airbus Safety Magazine. 2012. Available online: https://safetyfirst.airbus.com/app/themes/mh_newsdesk/documents/archives/a380-development-of-the-flight-controls.pdf (accessed on 7 September 2022).
- Lelaie, C. A380: Development of the flight controls Part: 2. In Safety First–The Airbus Safety Magazine. 2012. Available online: https://safetyfirst.airbus.com/app/themes/mh_newsdesk/documents/archives/a380-development-of-the-flight-controls2.pdf (accessed on 7 September 2022).
- Sattar, A.; Wang, L.; Mohamed, A.; Panta, A.; Fisher, A. System identification of fixed-wing uav with multi-segment control surfaces. In Proceedings of the 2019 Australian & New Zealand Control Conference (ANZCC), Auckland, New Zealand, 27–29 November 2019; pp. 76–81. [Google Scholar]
- Moreira, E.I.; Shiroma, P.M. Design of fractional PID controller in time-domain for a fixed-wing unmanned aerial vehicle. In Proceedings of the 2017 Latin American Robotics Symposium (LARS) and 2017 Brazilian Symposium on Robotics (SBR), Curitiba, Brazil, 8–11 November 2017; pp. 1–6. [Google Scholar]
- Poksawat, P.; Wang, L.; Mohamed, A. Automatic tuning of attitude control system for fixed-wing unmanned aerial vehicles. IET Control Theory Appl. 2016, 10, 2233–2242. [Google Scholar] [CrossRef]
- Hervas, J.R.; Reyhanoglu, M.; Tang, H.; Kayacan, E. Nonlinear control of fixed-wing UAVs in presence of stochastic winds. Commun. Nonlinear Sci. Numer. Simul. 2016, 33, 57–69. [Google Scholar] [CrossRef]
- Choi, M.H.; Shirinzadeh, B.; Porter, R. System identification-based sliding mode control for small-scaled autonomous aerial vehicles with unknown aerodynamics derivatives. IEEE/ASME Trans. Mechatron. 2016, 21, 2944–2952. [Google Scholar] [CrossRef]
- Kang, Y.; Hedrick, J.K. Linear tracking for a fixed-wing UAV using nonlinear model predictive control. IEEE Trans. Control. Syst. Technol. 2009, 17, 1202–1210. [Google Scholar] [CrossRef]
- Lam, V.T.T.; Sattar, A.; Wang, L.; Lazar, M. Fast Hildreth-based Model Predictive Control of Roll Angle for a Fixed-Wing UAV. IFAC-PapersOnLine 2020, 53, 5757–5763. [Google Scholar] [CrossRef]
- Gomez, J.F.; Jamshidi, M. Fuzzy logic control of a fixed-wing unmanned aerial vehicle. In Proceedings of the World Automation Congress (WAC), Kobe, Japan, 19–23 September 2010; pp. 1–8. [Google Scholar]
- de Oliveira, H.A.; Rosa, P.F.F. Genetic neuro-fuzzy approach for unmanned fixed wing attitude control. In Proceedings of the 2017 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 31 May–2 June 2017; pp. 485–492. [Google Scholar]
- Zhao, S.; Wang, X.; Kong, W.; Zhang, D.; Shen, L. A novel backstepping control for attitude of fixed-wing UAVs with input disturbance. In Proceedings of the 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 693–697. [Google Scholar]
- Kang, C.; Park, B.; Choi, J. Scheduling PID Attitude and Position Control Frequencies for Time-Optimal Quadrotor Waypoint Tracking under Unknown External Disturbances. Sensors 2022, 22, 150. [Google Scholar] [CrossRef]
- Mystkowski, A. Robust control of the micro UAV dynamics with an autopilot. J. Theor. Appl. Mech. 2013, 51, 751–761. [Google Scholar]
- Hoshu, A.A.; Wang, L.; Sattar, A.; Fisher, A. Auto-Tuning of Attitude Control System for Heterogeneous Multirotor UAS. Remote Sens. 2022, 14, 1540. [Google Scholar] [CrossRef]
- Hoshu, A.A.; Wang, L.; Fisher, A.; Sattar, A. Cascade control for heterogeneous multirotor UAS. Int. J. Intell. Unmanned Syst. 2021. [Google Scholar] [CrossRef]
- Hoshu, A.A.; Fisher, A.; Wang, L. Cascaded Attitude Control For Heterogeneous Multirotor UAS For Enhanced Disturbance Rejection. In Proceedings of the 2019 Australian and New Zealand Control Conference (ANZCC), Auckland, New Zealand, 27–29 November 2019; pp. 110–115. [Google Scholar]
- Wang, L.; Cluett, W. Tuning PID controllers for integrating processes. IEE Proc.-Control. Theory Appl. 1997, 144, 385–392. [Google Scholar] [CrossRef]
- Wang, L. PID Control System Design and Automatic Tuning Using MATLAB/Simulink; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- InvenSense. Embedded Motion Driver v5.1.1 APIs Specification; InvenSense Inc.: Sunnyvale, CA, USA, 2012. [Google Scholar]
- Ravi, S. The Influence of Turbulence on a Flat Plate Aerofoil at Reynolds Numbers Relevant to MAVs. Ph.D. Thesis, School of Aerospace, Mechanical and Manufacturing Engineering, RMIT University, Melbourne, Australia, 2011. [Google Scholar]
- Vino, G. An Experimental Investigation into the Time-Averaged and Unsteady Aerodynamics of the Simplified Passenger Vehicle in Isolation and in Convoys. Ph.D. Thesis, RMIT University, Melbourne, Australia, 2005. [Google Scholar]
- Pagliarella, R. On the Aerodynamic Performance of Automotive Vehicle Platoons Featuring pre and Post-Critical Leading Forms. Ph.D. Thesis, RMIT University, Melbourne, Australia, 2009. [Google Scholar]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Salman, S.A.; Sreenatha, A.G.; Choi, J.Y. Attitude dynamics identification of unmanned aircraft vehicle. Int. J. Control. Autom. Syst. 2006, 4, 782. [Google Scholar]
- Sattar, A.; Wang, L.; Mohamed, A.; Fisher, A. Roll Rate Controller Design of Small Fixed Wing UAV using Relay with Embedded Integrator. In Proceedings of the 2020 Australian and New Zealand Control Conference (ANZCC), Gold Coast, Australia, 26–27 November 2020; pp. 149–153. [Google Scholar]
- Wang, L. From Plant Data to Process Control: Ideas for Process Identification and PID Design; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Wang, L. Automatic tuning of PID controllers using frequency sampling filters. IET Control Theory Appl. 2017, 11, 985–995. [Google Scholar] [CrossRef]
- Kreyszig, E. Advanced Engineering Mathematics; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Details |
|---|---|
| Airfoil | Flat plate |
| Wing length | 290.0 mm |
| Chord | 160 mm |
| Cruise speed | 10.0 m |
| Camber | 4.0 mm |
| Aileron segment size | 145 × 45 mm |
| Components | Details |
|---|---|
| Micro-controller | MK64FX512VMD12 |
| Attitude sensor | MPU6050 with DMP |
| Servo | KST10 |
| Data Logger | OpenLog (blackbox) |
| Voltage Regulator | Step-down DC–DC converter |
| Specifications | Details |
|---|---|
| Operating Voltage | 4.8–7.4 V |
| Speed | 0.04 s/60 @ 7.4 V |
| Input pulse | 800 S to 2200 S |
| Torque | 3.4 kg/cm @ 7.4 V |
| Gear Type | All Metal Gear |
| Weight | 20 g |
| Inner Segments | Value | Outer Segments | Value |
|---|---|---|---|
| Inner Segments | Value | Outer Segments | Value |
|---|---|---|---|
| Aileron Configuration | MSE: Laminar Flow | MSE: Turbulent Flow |
|---|---|---|
| Inner segments only | ||
| Outer segments only | ||
| The error-threshold based control |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sattar, A.; Wang, L.; Hoshu, A.A.; Ansari, S.; Karar, H.-e.; Mohamed, A. Automatic Tuning and Turbulence Mitigation for Fixed-Wing UAV with Segmented Control Surfaces. Drones 2022, 6, 302. https://doi.org/10.3390/drones6100302
Sattar A, Wang L, Hoshu AA, Ansari S, Karar H-e, Mohamed A. Automatic Tuning and Turbulence Mitigation for Fixed-Wing UAV with Segmented Control Surfaces. Drones. 2022; 6(10):302. https://doi.org/10.3390/drones6100302
Chicago/Turabian StyleSattar, Abdul, Liuping Wang, Ayaz Ahmed Hoshu, Shahzeb Ansari, Haider-e Karar, and Abdulghani Mohamed. 2022. "Automatic Tuning and Turbulence Mitigation for Fixed-Wing UAV with Segmented Control Surfaces" Drones 6, no. 10: 302. https://doi.org/10.3390/drones6100302
APA StyleSattar, A., Wang, L., Hoshu, A. A., Ansari, S., Karar, H.-e., & Mohamed, A. (2022). Automatic Tuning and Turbulence Mitigation for Fixed-Wing UAV with Segmented Control Surfaces. Drones, 6(10), 302. https://doi.org/10.3390/drones6100302