



Supporting Long-Term Archaeological Research in Southern Romania Chalcolithic Sites Using Multi-Platform UAV Mapping

 , , , and
, , , and 
Abstract
1. Introduction
2. Study Area and Project Outline
3. Data Acquisition
3.1. Airborne Image-Based Sensors
- -
- Near-infrared (NIR): 840 nm (±26 nm);
- -
- Red edge (RE): 730 nm (±16 nm);
- -
- Red (R): 650 nm (16 nm);
- -
- Green (G): 560 nm (±16 nm); and
- -
- Blue (B): 450 (±16 nm).
3.2. Airborne Laser Scanning
3.3. Flight Plan Preparation and System Comparison
4. Data Processing
4.1. Georeferencing UAV Images
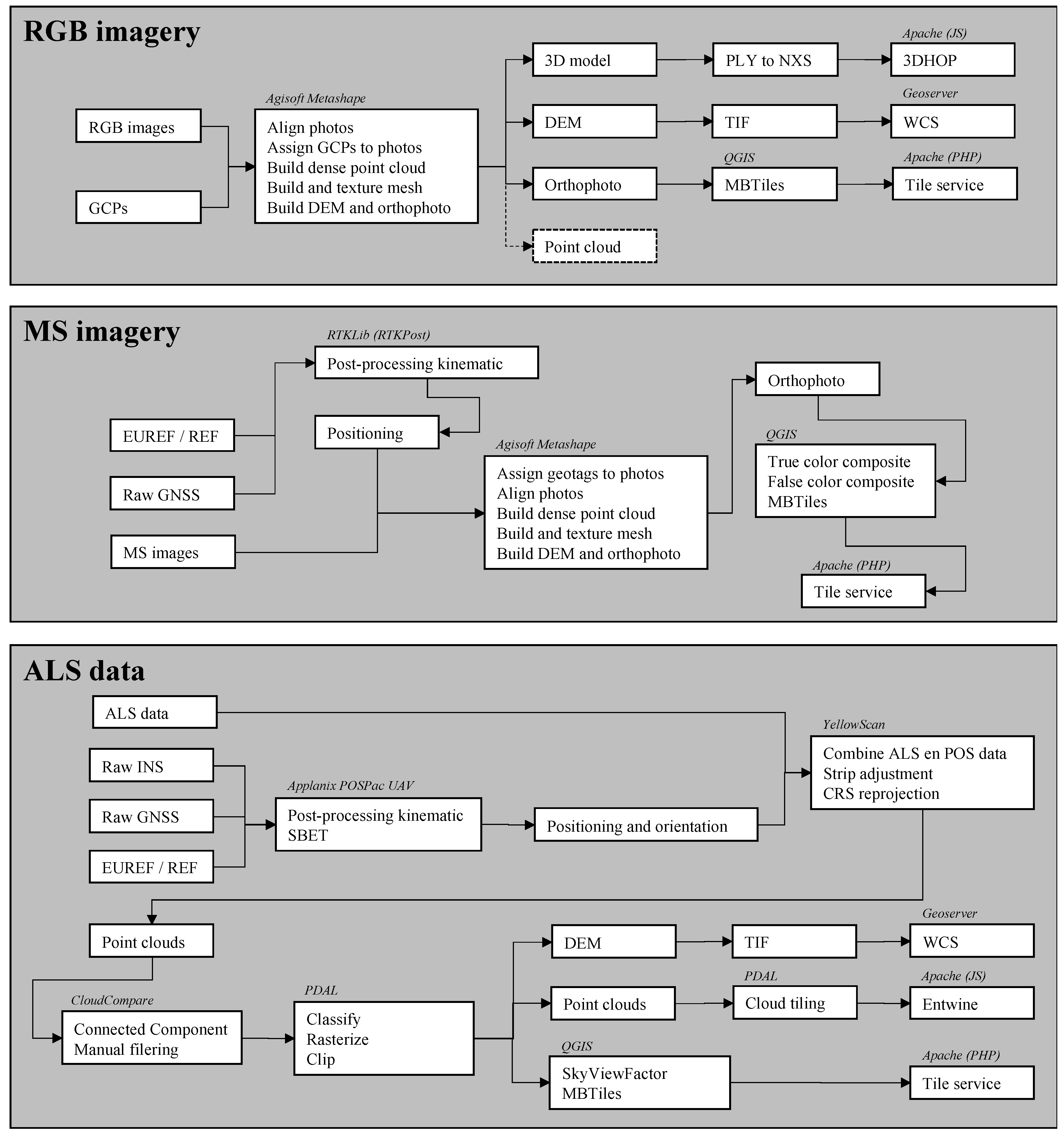
4.2. AGISOFT
4.3. ALS
5. Results and Quality Analysis
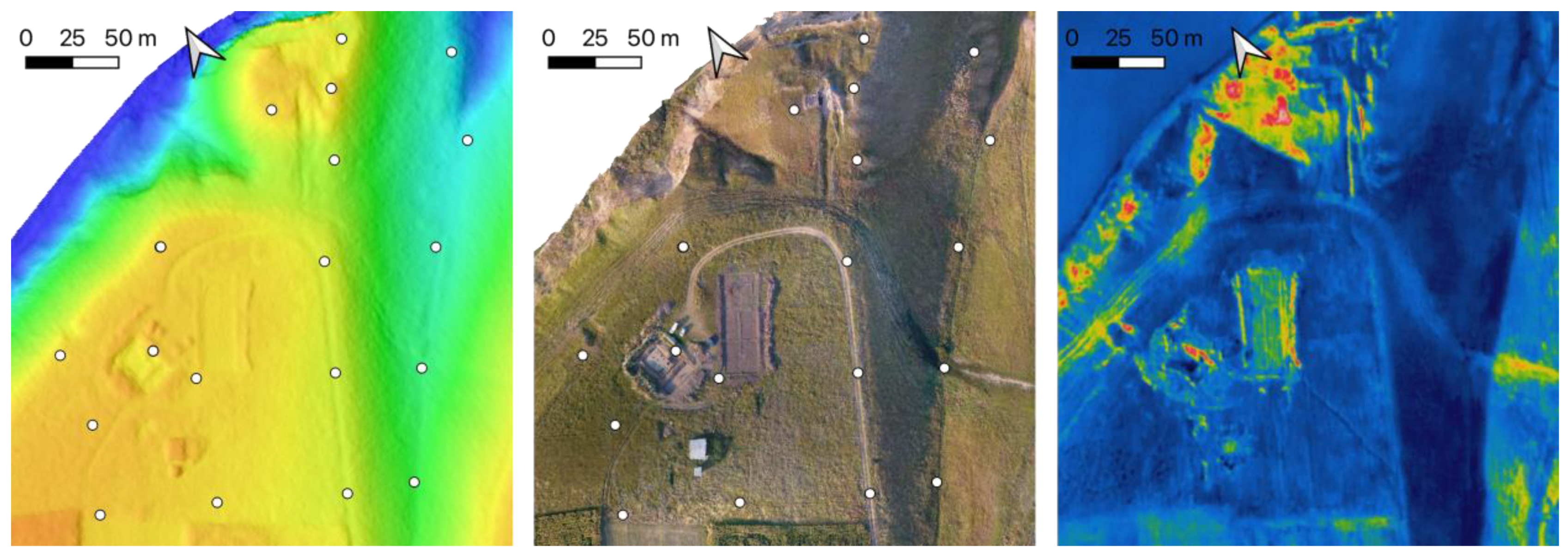
5.1. Sultana
5.2. Chiselet
5.3. Overview of the Obtained Data
5.4. Quality Analysis
5.4.1. ANOVA Using Checkpoints
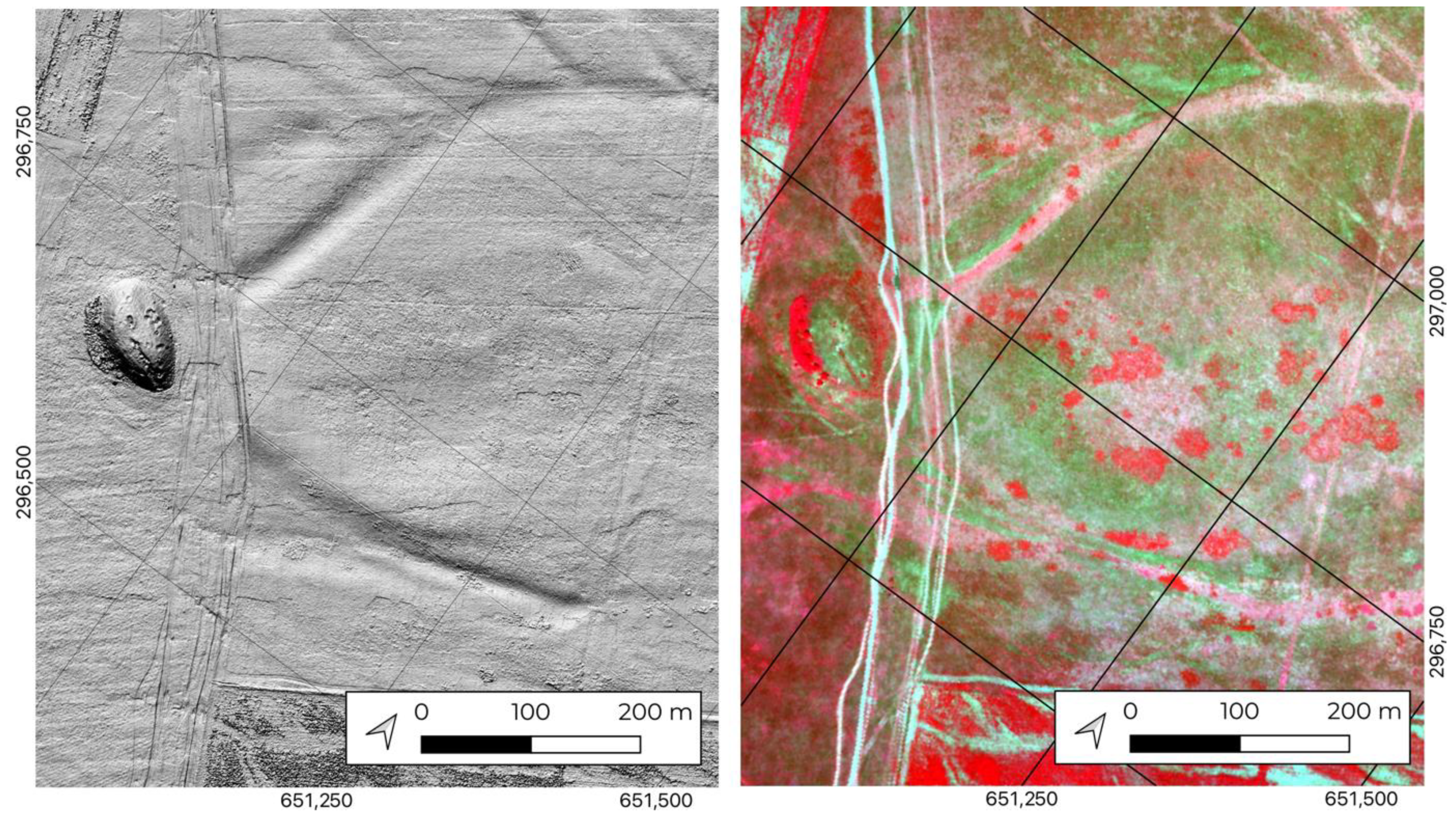
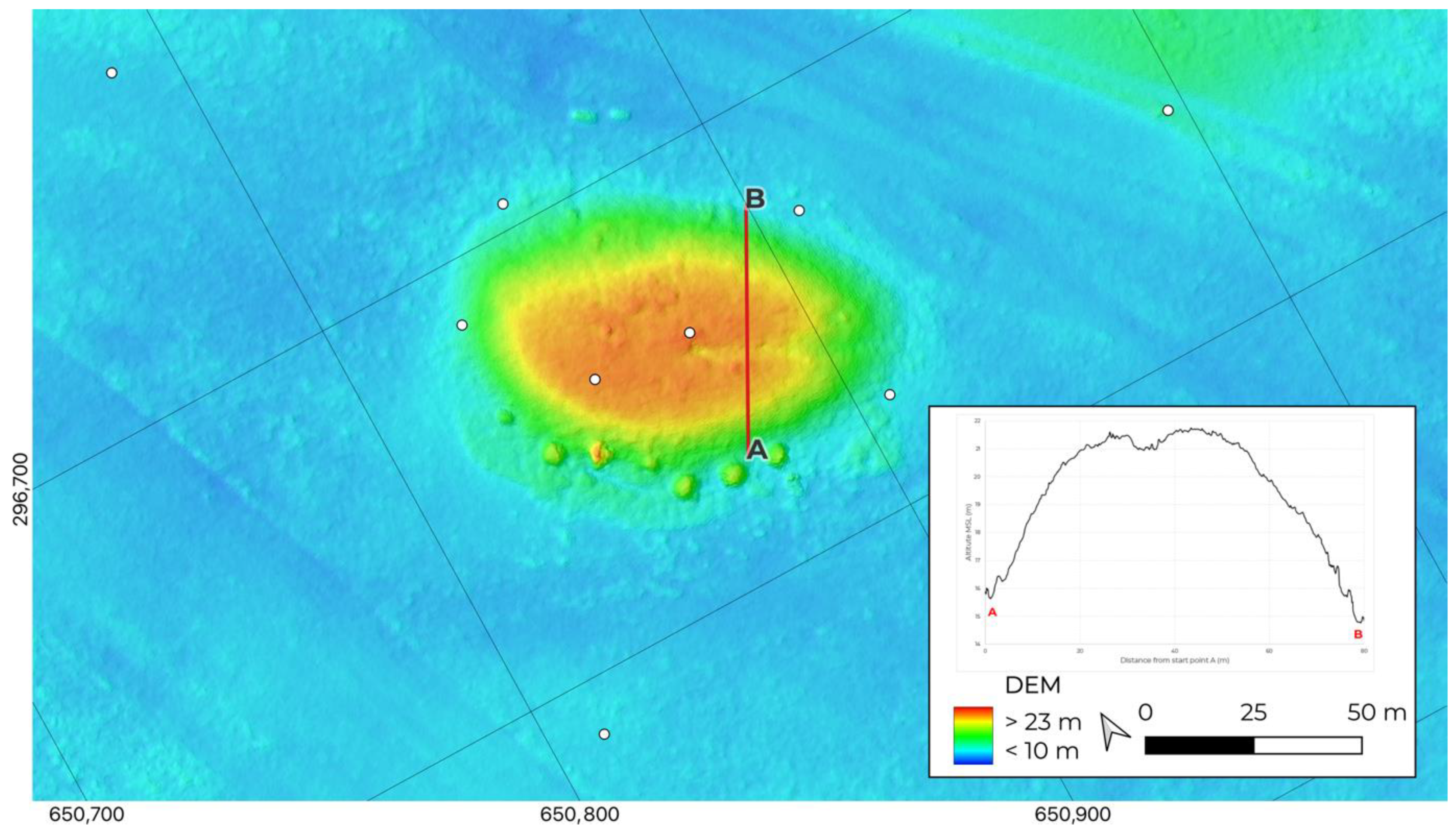
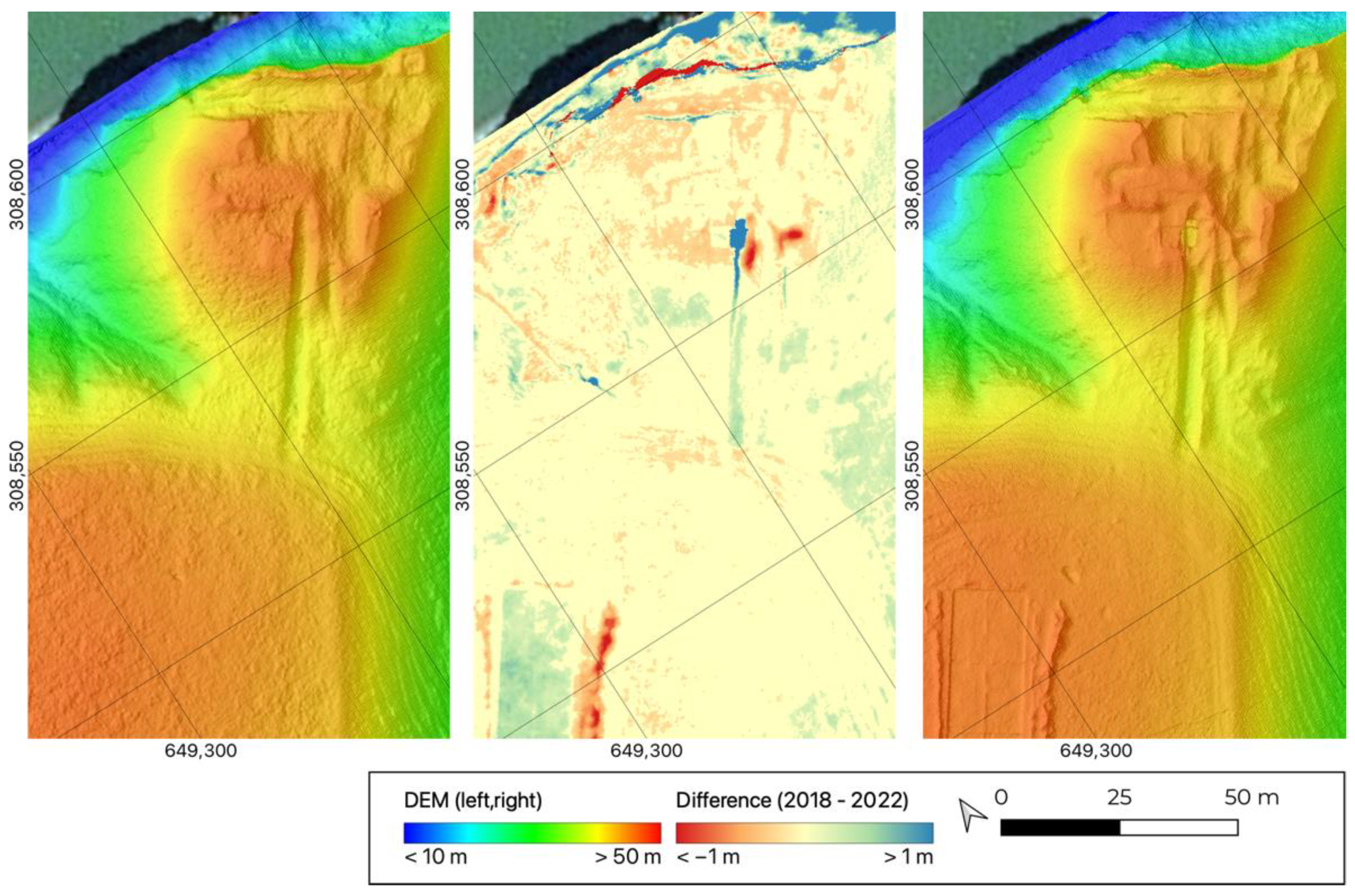
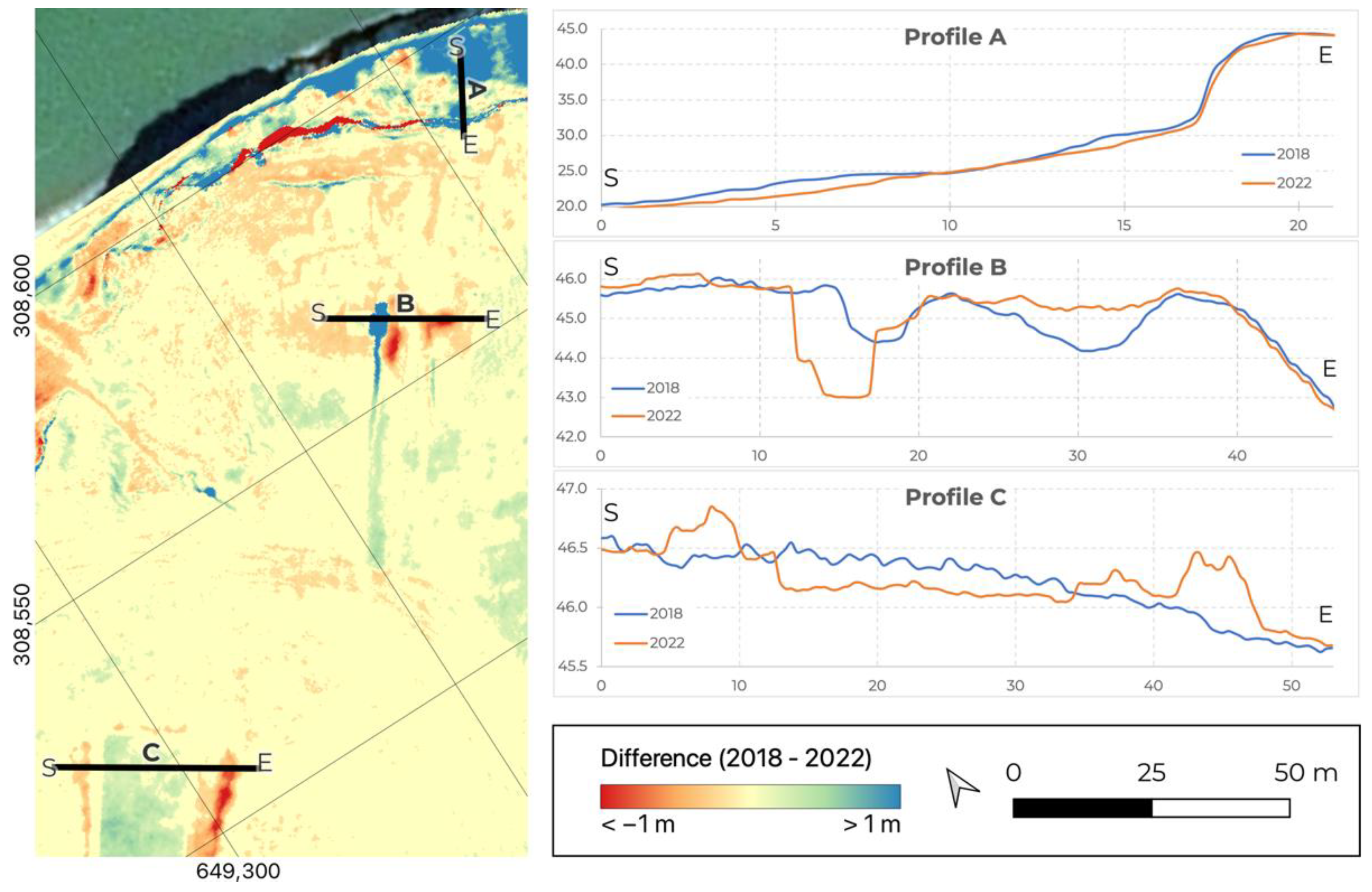
5.4.2. Qualitative Comparative Analysis of DEMs and Time Series Analysis
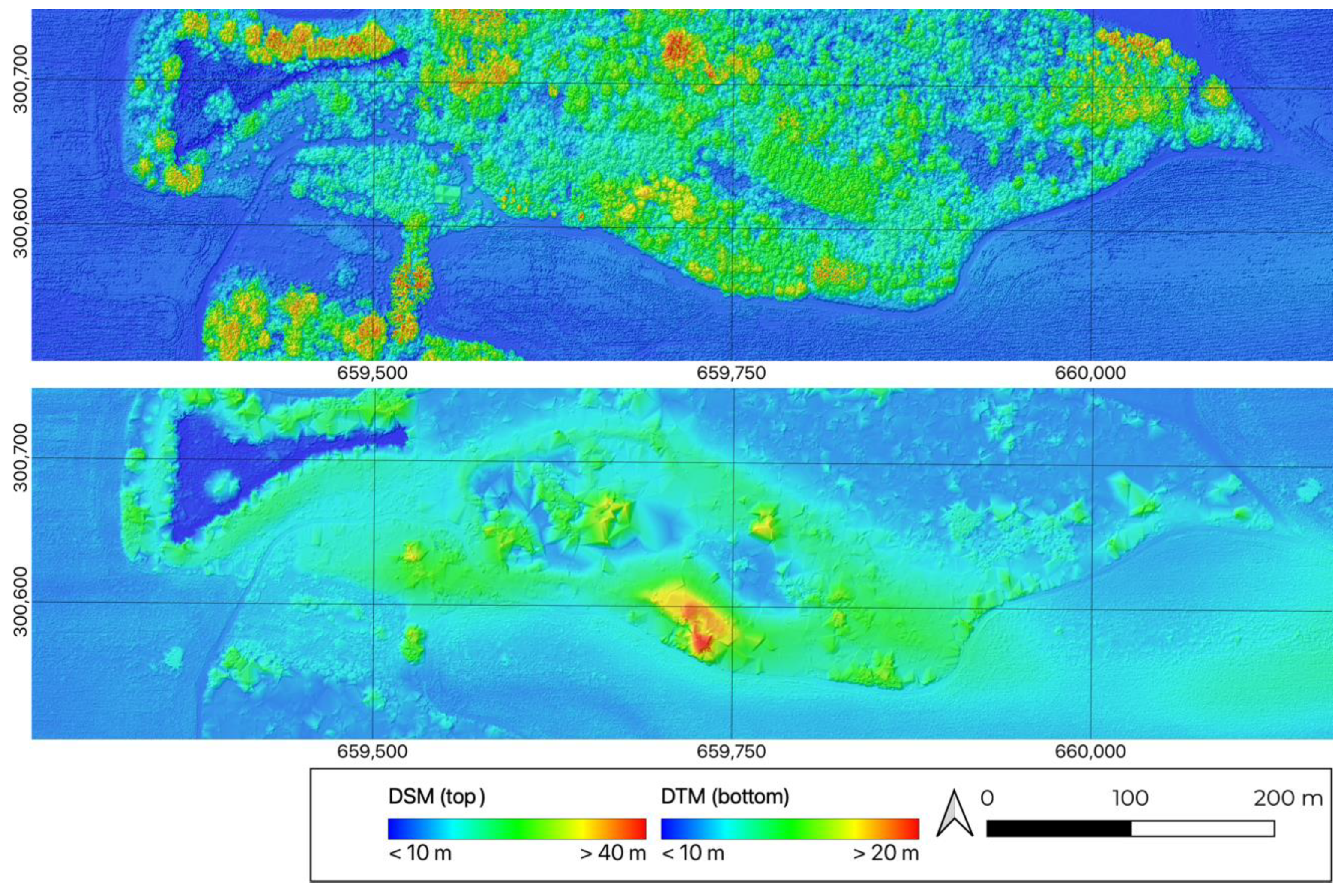
5.4.3. Evaluating Point Clouds of Vegetated Sites
5.5. Data Publication
6. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Haala, N.; Alshawabkeh, Y. Combining Laser Scanning and Photogrammetry: A Hybrid Approach for Heritage Documentation. In Proceedings of the 7th International Symposium on Virtual Reality, Archeology and Cultural Heritage, Nicosia, Cyprus, 30 October–4 November 2006; pp. 163–170. [Google Scholar]
- Remondino, F. Heritage Recording and 3D Modeling with Photogrammetry and 3D Scanning. Remote Sens. 2011, 3, 1104–1138. [Google Scholar] [CrossRef]
- Stal, C.; Bourgeois, J.; de Maeyer, P.; de Mulder, G.; de Wulf, A.; Goossens, R.; Hendrickx, M.; Nuttens, T.; Stichelbout, B. Quality Analysis of Structure from Motion in Archaeological Airborne Applications. In Proceedings of the 32nd EARSeL Symposium on Advances in Geosciences, Mykonos, Greece, 21–24 May 2012; pp. 1–11. [Google Scholar]
- Verhoeven, G.; Doneus, M.; Briese, C.; Vermeulen, F. Mapping by Matching: A Computer Vision-Based Approach to Fast and Accurate Georeferencing of Archaeological Aerial Photographs. J. Archaeol. Sci. 2012, 39, 2060–2070. [Google Scholar] [CrossRef]
- Ferdani, D.; Demetrescu, E.; Cavalieri, M.; Pace, G.; Lenzi, S. 3D Modelling and Visualization in Field Archaeology. From Survey to Interpretation of the Past Using Digital Technologies. Groma. Doc. Archaeol. 2020, 4, 1–21. [Google Scholar] [CrossRef]
- Lucas, G. Destruction and the Rhetoric of Excavation. Nor. Archaeol. Rev. 2001, 34, 35–46. [Google Scholar] [CrossRef]
- Stal, C.; van Liefferinge, K.; de Reu, J.; Docter, R.; Dierkens, G.; de Maeyer, P.; Mortier, S.; Nuttens, T.; Pieters, T.; van den Eijnde, F.; et al. Integrating Geomatics in Archaeological Research at the Site of Thorikos (Greece). J. Archaeol. Sci. 2014, 45, 112–125. [Google Scholar] [CrossRef]
- Hendrickx, M.; Gheyle, W.; Bonne, J.; Bourgeois, J.; de Wulf, A.; Goossens, R. The Use of Stereoscopic Images Taken from a Microdrone for the Documentation of Heritage: An Example from the Tuekta Burial Mounds in the Russian Altay. J. Archaeol. Sci. 2011, 38, 2968–2978. [Google Scholar] [CrossRef]
- Field, S.; Waite, M.; Wandsnider, L. The Utility of UAVs for Archaeological Surface Survey: A Comparative Study. J. Archaeol. Sci. Rep. 2017, 13, 577–582. [Google Scholar] [CrossRef]
- Wyard, C.; Beaumont, B.; Grippa, T.; Georganos, S.; Hallot, E. UAVs for Fine-Scale Open-Source Landfill Mapping. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 8217–8220. [Google Scholar]
- Roman, A.; Ursu, T.M.; Lăzărescu, V.A.; Opreanu, C.H.; Fărcaş, S. Visualization Techniques for an Airborne Laser Scanning-Derived Digital Terrain Model in Forested Steep Terrain: Detecting Archaeological Remains in the Subsurface. Geoarchaeology 2017, 32, 549–562. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppa, J.; Jaakkola, A. Mini-UAV-Borne LIDAR for Fine-Scale Mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Dominika, S.; Bartłomiej, Ć.; Krzysztof, W.; Dąbek, P.B.; Bastante, J.M.; Izabela, W. Inca Water Channel Flow Analysis Based on 3D Models from Terrestrial and UAV Laser Scanning at the Chachabamba Archaeological Site (Machu Picchu National Archaeological Park, Peru). J. Archaeol. Sci. 2022, 137, 105515. [Google Scholar] [CrossRef]
- Andreescu, R.R.; Lazăr, C. Valea Mostiștei. Așezarea Gumelnițeană de la Sultana Malu Roșu. Cercet. Arheol. 2008, 15, 55–76. [Google Scholar] [CrossRef]
- Covataru, C.; Stal, C.; Florea, M.; Opriș, I.; Simon, C.; Radulescu, I.; Călin, R.; Ignat, T.; Ghiță, C.; Lazăr, C. Human Impact Scale on the Preservation of the Archaeological Sites from Mostiștea Valley (Romania). Front. Environ. Sci. 2022, 10, 1065. [Google Scholar] [CrossRef]
- Ghiță, C. The Microrelief as Result of Morphohydroclimatic Conditions in Mostistea River Basin. Rev. De Geomorfol. 2008, 10, 103–111. [Google Scholar]
- Buzea, E. Flooded Areas and Their Importance in Maintaining Biodiversity. Meadow Lower Danube. J. Wetl. Biodivers. 2011, 1, 23–46. [Google Scholar]
- Tetecu, C. Lunca Dunării Între Olteniţa Şi Călăraşi: Studiu Privind Calitatea Mediului; University of Bucharest, Department of Geography: Bucharest, Romania, 2008. [Google Scholar]
- Ursulescu, N.; Petrescu Dîmbovița, M.; Mohan, D. Neo-Eneoliticul. In Moştenirea Timpurilor Îndepărtate; Istoria Românilor I; Editura Enciclopedica: Bucharest, Romania, 2001; Volume 1, pp. 111–197. [Google Scholar]
- Todorova, H. The Neolithic, Eneolithic and Transitional Period in Bulgarian Prehistory. In Prehistoric Bulgaria: Monographs in World Archaeology; Bailey, D.W., Panayotov, I., Alexandrov, S., Eds.; Prehistory Press: Madison, WI, USA, 1995; Volume 22, pp. 79–98. [Google Scholar]
- Bailey, D.W.; Tringham, R.; Bass, J.; Stevanović, M.; Hamilton, M.; Neumann, H.; Angelova, I.; Raduncheva, A. Expanding the Dimensions of Early Agricultural Tells: The Podgoritsa Archaeological Project, Bulgaria. J. Field Archaeol. 1998, 25, 373–396. [Google Scholar] [CrossRef]
- Bréhard, S.; Bălăşescu, A. What’s behind the Tell Phenomenon? An Archaeozoological Approach of Eneolithic Sites in Romania. J. Archaeol. Sci. 2012, 39, 3167–3183. [Google Scholar] [CrossRef]
- Chapman, J.; Higham, T.; Slavchev, V.; Gaydarska, B.; Honch, N. The Social Context of the Emergence, Development and Abandonment of the Varna Cemetery, Bulgaria. Eur. J. Archaeol. 2006, 9, 159–183. [Google Scholar] [CrossRef]
- Andrieșescu, I. Les Fouilles de Sultana. Dacia 1924, I, 51–107. [Google Scholar]
- Dumitrescu, H. Rapport Sur Les Sondages de Grădiștea-Fundeasca. Dacia 1927, III–IV, 150–156. [Google Scholar]
- Christescu, V. Les Stations Préhistoriques Du Lac de Boian. Dacia 1925, II, 249–303. [Google Scholar]
- Vlădescu-Vulpe, R. Pentru Harta Arhaeologică a României Ridicată de Direcția Muzeului Național de Antichități I. Regiunea Mostiştea-Călăraşi. Bul. Comisunii Monum. Istor. 1924, 17. [Google Scholar]
- Dumitrescu, V. Découvertes de Gumelnița. Dacia 1924, I, 325–342. [Google Scholar]
- Dumitrescu, V. Oameni și Cioburi. Contribuții La Istoria Contemporană a Arheologiei Românești; Muzeul Dunării de Jos: Călăraşi, Romania, 1993. [Google Scholar]
- Șerbănescu, D.; Șandric, B. Tell-Uri Eneolitice În Regiunea Valea Mostiștei. O Privire Generală. Archaeol. Debates 2012, 2, 103–150. [Google Scholar]
- Bucur, M.; Puda, C.; Morintz, S.; Mateescu, C. Șantierul Spanțov. Stud. Și Cercetări Istor. Veche 1953, 4, 220–239. [Google Scholar]
- Morintz, S.; Preda, C. Săpăturile de La Spanțov (r. Oltenița, Reg. București). Mater. Şi Cercetări Arheol. 1959, 5, 163–173. [Google Scholar] [CrossRef]
- Oberländer-Târnoveanu, I.; Bem, C. România: Un Viitor Pentru Trecut. Fotografiile Aeriene În Repertorierea Siturilor Arheologice”. In Arheologie Aeriană: În România şi în Europa; Palmer, R., Oberländer-Tărnoveanu, I., Eds.; CIMEC, Institutul de Memorie Culturală: Bucharest, Romania, 2009; pp. 62–88. [Google Scholar]
- Palmer, R.; Oberländer-Tărnoveanu, I. Arheologie Aeriană: În România Şi În Europa; CIMEC, Institutul de Memorie Culturală: Bucharest, Romania, 2009. [Google Scholar]
- Oberländer-Târnoveanu, I. Proiecte de Arheologie Aeriană În România. Angvstia 2010, 14, 389–412. [Google Scholar]
- Uren, J.; Price, W.F. Surveying for Engineers; Palgrave Macmillan: Basingstoke, UK, 2010; ISBN 1137052791. [Google Scholar]
- DJI. Available online: www.dji.com (accessed on 10 September 2022).
- Adami, A.; Fregonese, L.; Gallo, M.; Helder, J.; Pepe, M.; Treccani, D. Ultra Light Uav Systems for the Metrical Documentation of Cultural Heritage: Applications for Architecture and Archaeology. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W17, 15–21. [Google Scholar] [CrossRef]
- Bates-Domingo, I.; Gates, A.; Hunter, P.; Neal, B.; Snowden, K.; Webster, D. Unmanned Aircraft Systems for Archaeology Using Photogrammetry and LiDAR in Southwestern United States; Embry-Riddle Aeronautical University: Daytona Beach, FL, USA, 2021. [Google Scholar]
- Agapiou, A.; Hadjimitsis, D.; Alexakis, D. Evaluation of Broadband and Narrowband Vegetation Indices for the Identification of Archaeological Crop Marks. Remote Sens. 2012, 4, 3892–3919. [Google Scholar] [CrossRef]
- Verhoeven, G. Near-Infrared Aerial Crop Mark Archaeology: From Its Historical Use to Current Digital Implementations. J. Archaeol. Method Theory 2012, 19, 132–160. [Google Scholar] [CrossRef]
- Šedina, J.; Housarová, E.; Raeva, P. Using RPAS for the Detection of Archaeological Objects Using Multispectral and Thermal Imaging. Eur. J. Remote Sens. 2019, 52, 182–191. [Google Scholar] [CrossRef]
- Quantum Systems. Available online: https://www.quantum-systems.com (accessed on 10 September 2022).
- Baltsavias, E. A Comparision between Photogrammetry and Laser Scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Puliti, S.; Dash, J.P.; Watt, M.S.; Breidenbach, J.; Pearse, G.D. A Comparison of UAV Laser Scanning, Photogrammetry and Airborne Laser Scanning for Precision Inventory of Small-Forest Properties. For. Int. J. For. Res. 2020, 93, 150–162. [Google Scholar] [CrossRef]
- Pfeifer, N.; Mandlburger, G. LiDAR Data Filtering and DTM Generation. In Topographic Laser Ranging and Scanning: Principles and Processing; Shan, J., Toth, C., Eds.; CRC Press: Boca Raton, Fl, USA, 2018; pp. 307–333. [Google Scholar]
- Trier, Ø.D.; Cowley, D.C.; Waldeland, A.U. Using Deep Neural Networks on Airborne Laser Scanning Data: Results from a Case Study of Semi-automatic Mapping of Archaeological Topography on Arran, Scotland. Archaeol. Prospect. 2019, 26, 165–175. [Google Scholar] [CrossRef]
- de Reu, J.; de Smedt, P.; Herremans, D.; van Meirvenne, M.; Lalooc, P.; de Clercq, W. On Introducing an Image-Based 3D Reconstruction Method in Archaeological Excavation Practice. J. Archaeol. Sci. 2014, 41, 251–262. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Broadcast versus Precise Ephemerides: A Multi-GNSS Perspective. GPS Solut. 2015, 19, 321–333. [Google Scholar] [CrossRef]
- Stal, C.; Poppe, H.; Vandenbulcke, A.; de Wulf, A. Study of Post-Processed GNSS Measurements for Tidal Analysis in the Belgian North Sea. Ocean. Eng. 2016, 118. [Google Scholar] [CrossRef]
- EUREF Permanent GNSS Network. Available online: https://www.epncb.oma.be/ (accessed on 11 September 2022).
- Chambers, D.; Schröter, J. Evaluation of RTKLIB’s Positioning Accuracy Using Low-Cost GNSS Receiver and ASG-EUPOS. J. Geodyn. 2011, 52, 333–343. [Google Scholar] [CrossRef]
- Agisoft Metashape. Available online: www.agisoft.com (accessed on 11 September 2022).
- Donato, E.; Giuffrida, D. Combined Methodologies for the Survey and Documentation of Historical Buildings: The Castle of Scalea (CS, Italy). Heritage 2019, 2, 2384–2397. [Google Scholar] [CrossRef]
- Ilie, D.; Balotă, O.L.; Iordan, D.; Nicoară, P.S. Algorithm and Application Development for Precise and Accurate Transformation of Lidar Point Clouds into National Coordinate Systems of Romania Using Official Equations and Quasigeoid Model. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, V-4-2022, 181–188. [Google Scholar] [CrossRef]
- Girardeau-Montaut, D. CloudCompare. Available online: www.cloudcompare.org (accessed on 11 September 2022).
- Butler, H.; Chambers, B.; Hartzell, P.; Glennie, C. PDAL: An Open Source Library for the Processing and Analysis of Point Clouds. Comput. Geosci. 2021, 148, 104680. [Google Scholar] [CrossRef]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-View Factor as a Relief Visualization Technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef]
- Böhner, J. SAGA: System for Automated Geoscientific Analyses. Available online: https://saga-gis.sourceforge.io (accessed on 11 September 2022).
- Stal, C.; de Wulf, A.; de Maeyer, P.; Goossens, R.; Nuttens, T.; Tack, F. Statistical Comparison of Urban 3D Models from Photo Modeling and Airborne Laser Scanning. In Proceedings of the International Multidisciplinary Scientific GeoConference (SGEM), Albena, Bulgaria, 16–22 June 2012; Volume 2, p. 8, (on CD-ROM). [Google Scholar]
- Wagenmakers, E.; Ly, A.; Boutin, B. JASP. Available online: https://jasp-stats.org (accessed on 11 September 2022).
- QGIS. Available online: www.qgis.org (accessed on 11 September 2022).
- Kutner, M.; Nachtsheim, C.; Neter, J.; Li, W. Applied Linear Statistical Models; McGray-Hill: New York, NY, USA, 2005. [Google Scholar]
- Podobnikar, T.; Vrecko, A. Digital Elevation Model from the Best Results of Different Filtering of a LiDAR Point Cloud. Trans. GIS 2012, 16, 603–617. [Google Scholar] [CrossRef]
- CERN Zenodo. Available online: https://zenodo.org (accessed on 11 September 2022).
- Peters, I.; Kraker, P.; Lex, E.; Gumpenberger, C.; Gorraiz, J.I. Zenodo in the Spotlight of Traditional and New Metrics. Front. Res. Metr. Anal. 2017, 2, 13. [Google Scholar] [CrossRef]
- Potenziani, M.; Callieri, M.; Dellepiane, M.; Corsini, M.; Ponchio, F.; Scopigno, R. 3DHOP: 3D Heritage Online Presenter. Comput. Graph. 2015, 52, 129–141. [Google Scholar] [CrossRef]
- Horbiński, T.; Lorek, D. The Use of Leaflet and GeoJSON Files for Creating the Interactive Web Map of the Preindustrial State of the Natural Environment. J. Spat. Sci. 2022, 67, 61–77. [Google Scholar] [CrossRef]
- Zunino, A.; Velázquez, G.; Celemín, J.; Mateos, C.; Hirsch, M.; Rodriguez, J. Evaluating the Performance of Three Popular Web Mapping Libraries: A Case Study Using Argentina’s Life Quality Index. ISPRS Int. J. Geoinf. 2020, 9, 563. [Google Scholar] [CrossRef]
- Entwine. Available online: https://entwine.io (accessed on 11 September 2022).
- Schutz, M.; Krosl, K.; Wimmer, M. Real-Time Continuous Level of Detail Rendering of Point Clouds. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Osaka, Japan, 23–27 March 2019; pp. 103–110. [Google Scholar]
- Schütz, M. Potree: Rendering Large Point Clouds in Web Browsers; Technische Universität Wien: Vienna, Austria, 2016. [Google Scholar]
- Kakoulaki, G.; Martinez, A.; Florio, P. Non-Commercial Light Detection and Ranging (LiDAR) Data in Europe; Publications Office of the European Union: Luxemburg, 2021. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DJI Phantom 4 | DJI Phantom 4 (MS) | DJI Mavic 2 Pro | DJI Mavic 2 Enterprise | |
|---|---|---|---|---|
| Resolution (px) | 4000 × 3000 | 1600 × 1300 | 5472 × 3078 | 4056 × 3040 |
| Sensor size (mm) | 6.2 × 4.9 | 4.9 × 4.0 | 13.8 × 7.7 | 6.17 × 4.55 |
| Pixel size (μm) | 1.56 | 3.04 | 2.53 | 1.51 |
| Focal length (mm) | 3.6 | 5.7 | 10.0 | 4.5 |
| 1 × 1 km | Trinity 90+ and Qube 240 | DJI Mavic 2 Pro | DJI Phantom 4 MS | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Height AGL(m) | 80 | 100 | 120 | 80 | 100 | 120 | 80 | 100 | 120 |
| Duration (hh:mm:ss) | 00:27:43 | 00:23:26 | 00:20:32 | 03:43:50 | 03:02:37 | 02:36:05 | 06:02:33 | 04:55:31 | 04:08:32 |
| Number of batteries | 1 | 1 | 1 | 9 | 8 | 7 | 15 | 12 | 10 |
| PD/GSD | 118 pts/m2 | 94 pts/m2 | 78 pts/m2 | 2.0 cm | 2.5 cm | 3.0 cm | 4.3 cm | 5.4 cm | 6.5 cm |
| 250 × 250 m | Trinity 90+ and Qube 240 | DJI Mavic 2 Pro | DJI Phantom 4 MS | ||||||
| Height AGL. (m) | 80 | 100 | 120 | 80 | 100 | 120 | 80 | 100 | 120 |
| Duration (hh:mm:ss) | 00:05:32 | 00:05:14 | 00:06:00 | 00:17:21 | 00:15:55 | 00:14:20 | 00:29:28 | 00:24:11 | 00:22:56 |
| Number of batteries | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 1 | 1 |
| PD/GSD | 118 pts/m2 | 94 pts/m2 | 78 pts/m2 | 2.0 cm | 2.5 cm | 3.0 cm | 4.3 cm | 5.4 cm | 6.5 cm |
| Location | Year | Technique | GSD/Resolution | Area (Ha) | Registration Error (3D, cm) |
|---|---|---|---|---|---|
| Sultana | 2018 | RGB | 2.3 cm | 9 | 7.4 |
| 2019 | RGB | 2.7 cm | 3 | 2.7 | |
| 2021 | RGB | 2.5 cm | 10 | 3.1 | |
| 2022 | MS | 27.5 cm | 219 | 9.5 | |
| 2022 | ALS | 104 pts/m2 | 577 | 5.0 | |
| Chiselet | 2019 | RGB | 2.7 cm | 3 | 2.7 |
| 2021 | RGB | 2.5 cm | 10 | 3.1 | |
| 2022 | MS | 27.5 cm | 219 | 9.5 | |
| 2022 | ALS | 93 pts/m2 | 577 | 5 | |
| Valea Orbului | 2022 | MS | 27.5 cm | 219 | 9.5 |
| 2022 | ALS | 93 pts/m2 | 520 | 6.2 | |
| Măriuța | 2022 | MS | 27.5 cm | 219 | 9.5 |
| 2022 | ALS | 93 pts/m2 | 577 | 5 | |
| Gumelnița | 2018 | RGB | 2.3 cm | 9 | 7.4 |
| 2019 | RGB | 2.7 cm | 3 | 2.7 | |
| 2021 | RGB | 2.5 cm | 10 | 3.1 | |
| 2022 | MS | 27.5 cm | 219 | 9.5 | |
| 2022 | ALS | 93 pts/m2 | 577 | 5 |
| Source of Variation | SS | df | MS | F | p | Fcritical |
|---|---|---|---|---|---|---|
| Between groups | 1.116 | 3 | 0.372 | 0.047 | 0.987 | 2.628 |
| Within groups | 3017.451 | 380 | 7.941 | |||
| Total | 3018.667 | 383 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stal, C.; Covataru, C.; Müller, J.; Parnic, V.; Ignat, T.; Hofmann, R.; Lazar, C. Supporting Long-Term Archaeological Research in Southern Romania Chalcolithic Sites Using Multi-Platform UAV Mapping. Drones 2022, 6, 277. https://doi.org/10.3390/drones6100277
Stal C, Covataru C, Müller J, Parnic V, Ignat T, Hofmann R, Lazar C. Supporting Long-Term Archaeological Research in Southern Romania Chalcolithic Sites Using Multi-Platform UAV Mapping. Drones. 2022; 6(10):277. https://doi.org/10.3390/drones6100277
Chicago/Turabian StyleStal, Cornelis, Cristina Covataru, Johannes Müller, Valentin Parnic, Theodor Ignat, Robert Hofmann, and Catalin Lazar. 2022. "Supporting Long-Term Archaeological Research in Southern Romania Chalcolithic Sites Using Multi-Platform UAV Mapping" Drones 6, no. 10: 277. https://doi.org/10.3390/drones6100277
APA StyleStal, C., Covataru, C., Müller, J., Parnic, V., Ignat, T., Hofmann, R., & Lazar, C. (2022). Supporting Long-Term Archaeological Research in Southern Romania Chalcolithic Sites Using Multi-Platform UAV Mapping. Drones, 6(10), 277. https://doi.org/10.3390/drones6100277