
SORA Methodology for Multi-UAS Airframe Inspections in an Airport

 , ,
, ,
Abstract
:1. Introduction
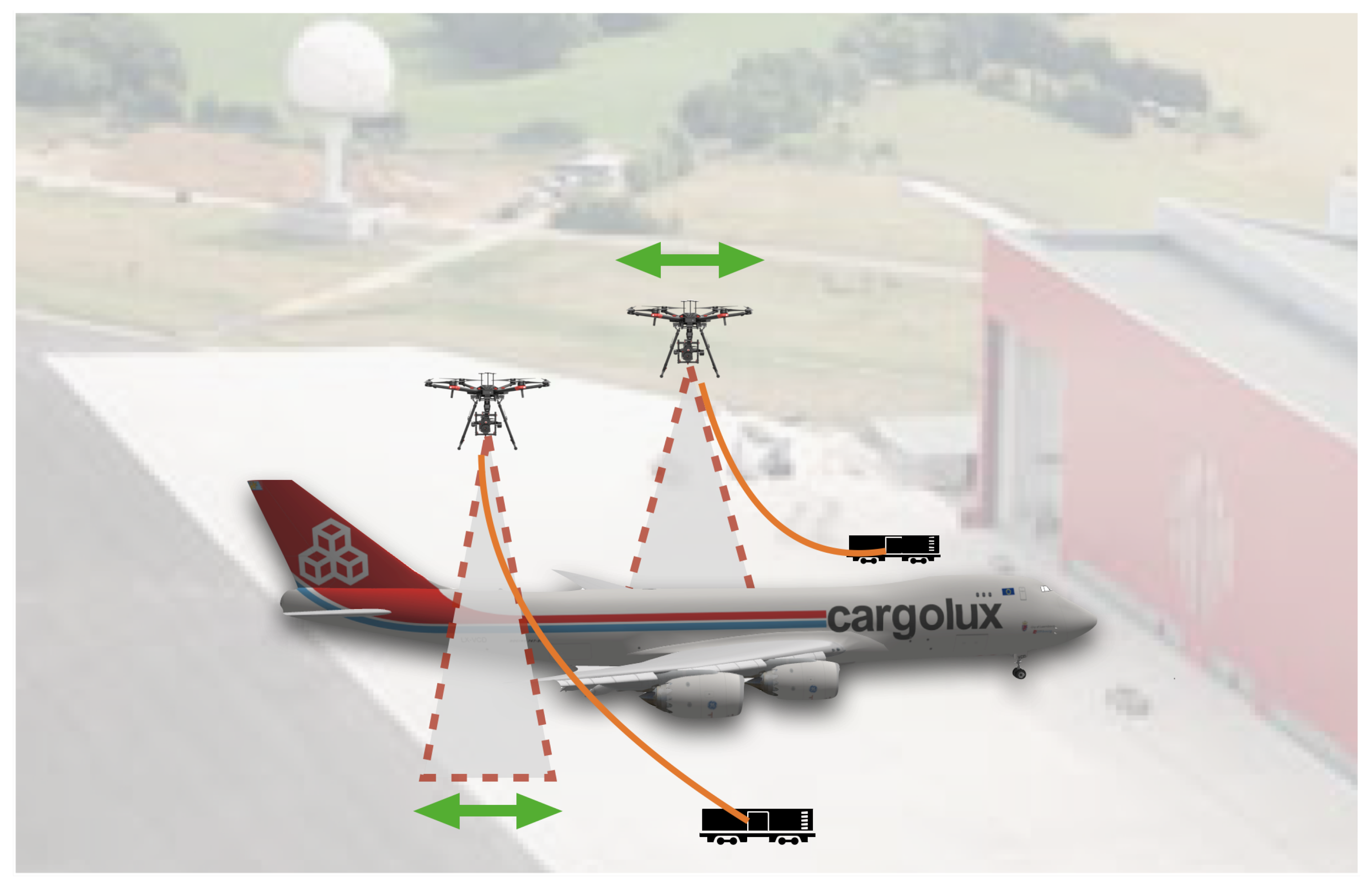
- Primarily, SORA mentioned three types of risks during a UAS-assisted mission, (A) injuries to third parties on the ground, (B) injuries to third parties in the air, and (C) damage to critical infrastructure [15]. To deal with the aforementioned risks, we adopted three safety measures during the airframe inspection. First, we created a restricted operational area so that any non-participant could not enter. This approach substantially reduces the risk associated with type A. In addition to this, we also created a restricted operational area for each UAS, a tethered system, and a shared information system to share the UAS location to avoid inter-UAS collisions. As a result, the risk associated with type B is reduced. Finally, we created a no-fly zone around the airframe to avoid collisions, thus mitigating type C risks.
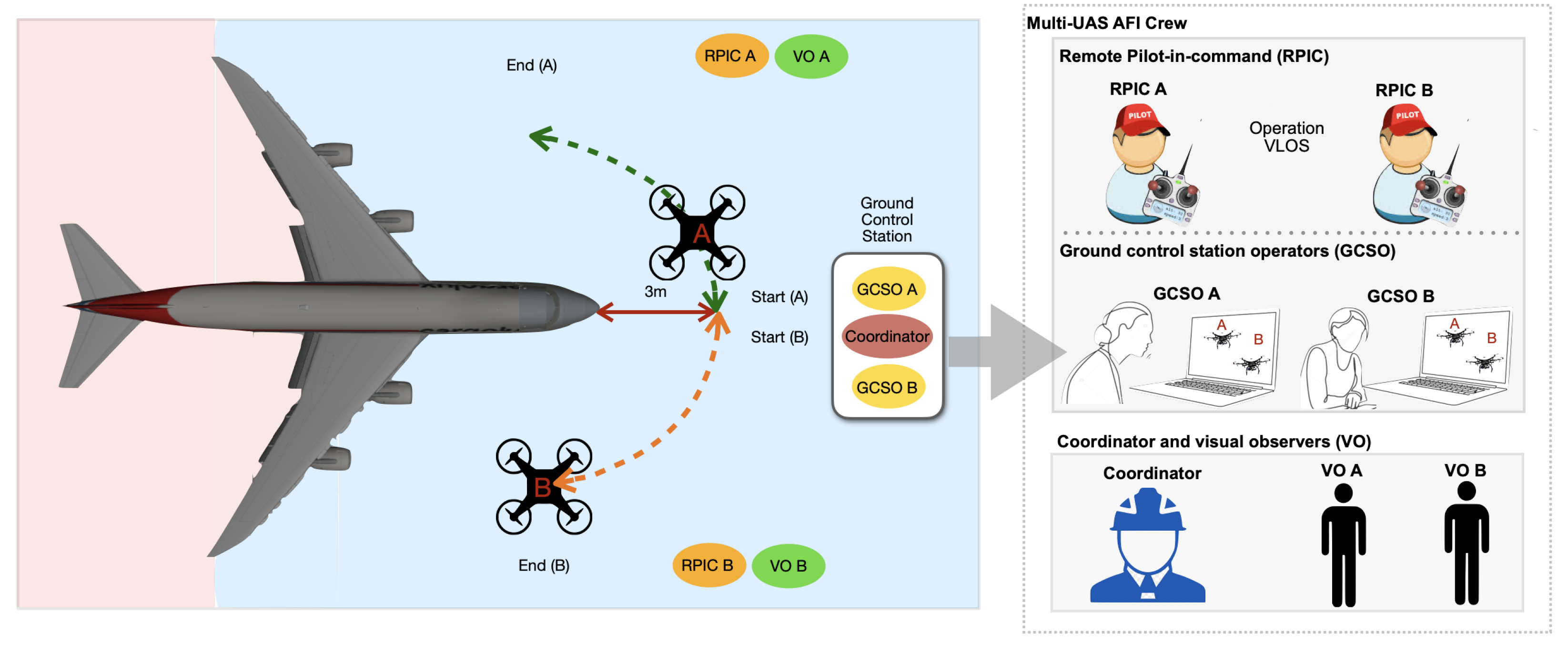
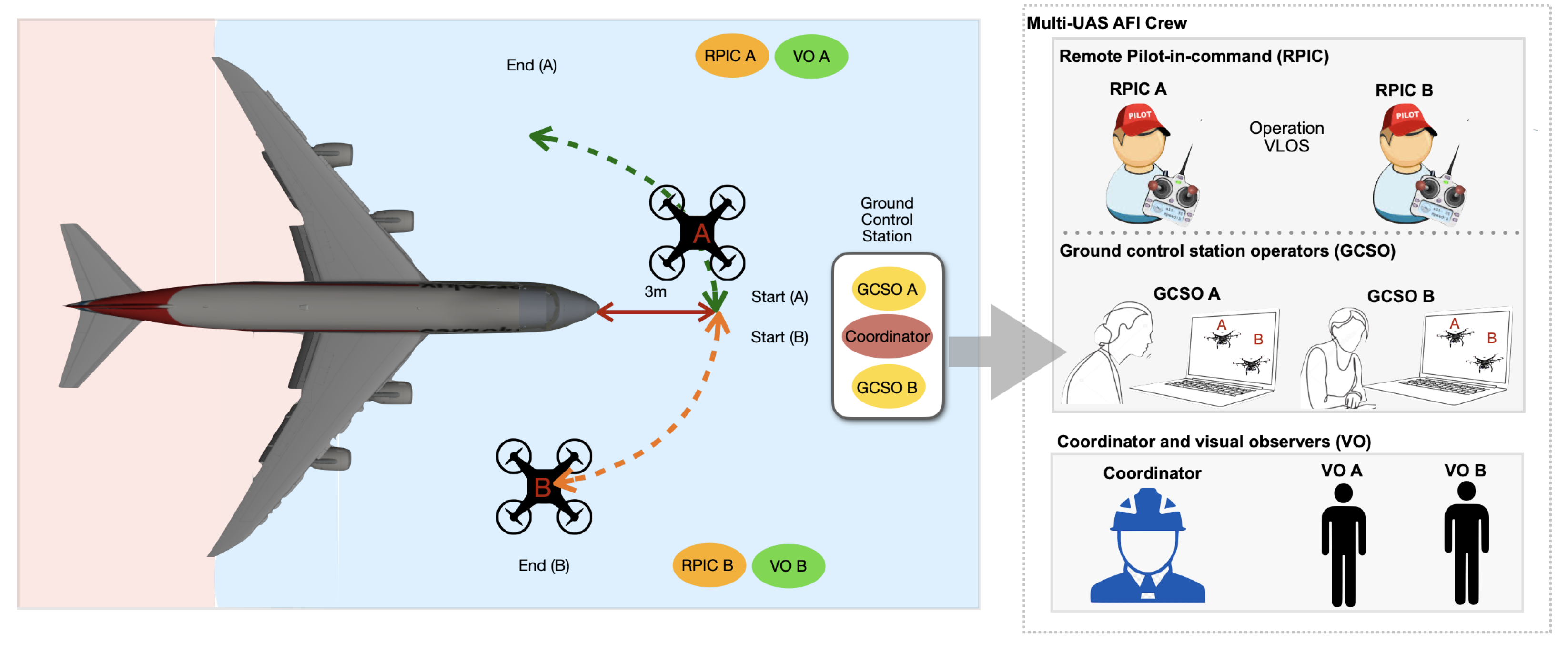
- Multi-UAS AFI operation introduces a three layer crew architecture in order to conduct a successful mission, (a) Remote Pilot-in-Command (RPIC), (b) Ground Control Station Operator (GCSO), and (c) coordinator and visual observer (VO) to enhance the mission and flight safety. VOs are in charge of detecting the aircraft using visual observations (conducting the “see” strategy). On the other hand, the RPIC or the GCSO is responsible for conducting the “avoid” strategy.
- The proposed Multi-UAS AFI operation is conducted a using behavior-based approach. To switch among the different behaviors (takeoff, landing, free-motion, and inspect), the GCSO must select the desired behavior of the UAS using the ground control station (GCS) during the operation, i.e., we embedded a human in the loop to enhance the mission safety.
2. Related Work
2.1. SORA-Based Applications
2.2. UAV-Assisted Airframe Inspection
2.3. Synthesis
3. Multi-UAS Airframe Inspection
Mission Overview
- During the preflight phase, the environmental conditions and the UAS state were verified. A briefing led by the Coordinator was used to make the crew aware of the operation, roles, responsibilities, communication means, and procedures to follow during the operation, revision of emergency procedures, and other topics. An essential part of the briefing was to conduct the preflight checklist with the crew, which allowed the team to identify hazards.
- Once the appropriate conditions to fly were verified, the crew conducted a calibration routine where the location of the airframe was automatically identified and stored. Given this information and the area of the airframe to inspect, a trajectory planning algorithm automatically calculated the trajectories of each UAS. These trajectories were stored in a configuration file and sent to each UAS.
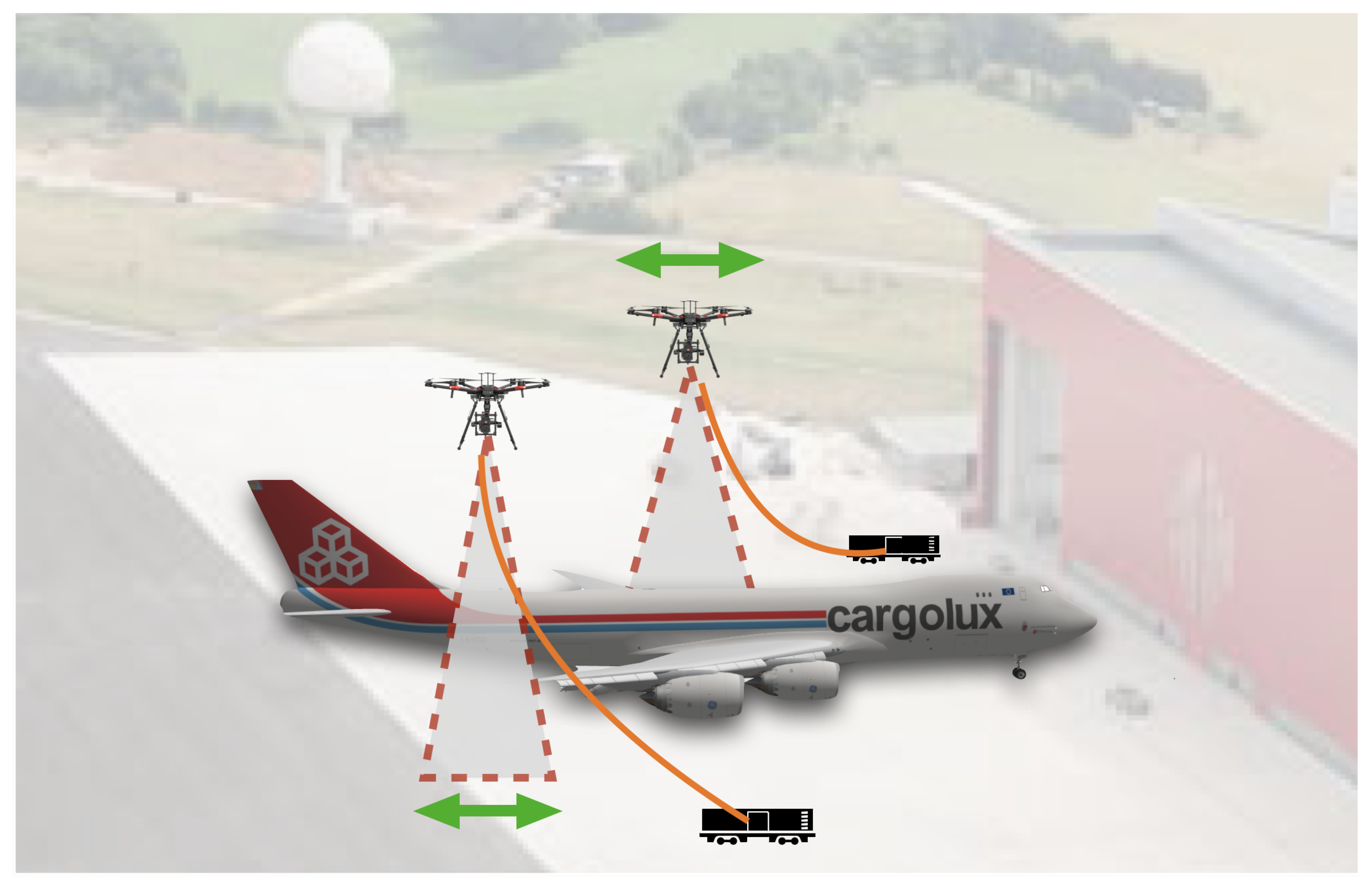
- After the crew and the equipment were in position, the Coordinator approved the starting of the operation, and the GCSOs commanded each UAS to take off. As described in Figure 3, as a risk mitigation strategy, each UAS started the operation in opposite directions.
- When both UASs reached the desired starting position, the GCSOs activated the inspection behavior. The UASs autonomously followed the pre-planned trajectories automatically and captured the image data.
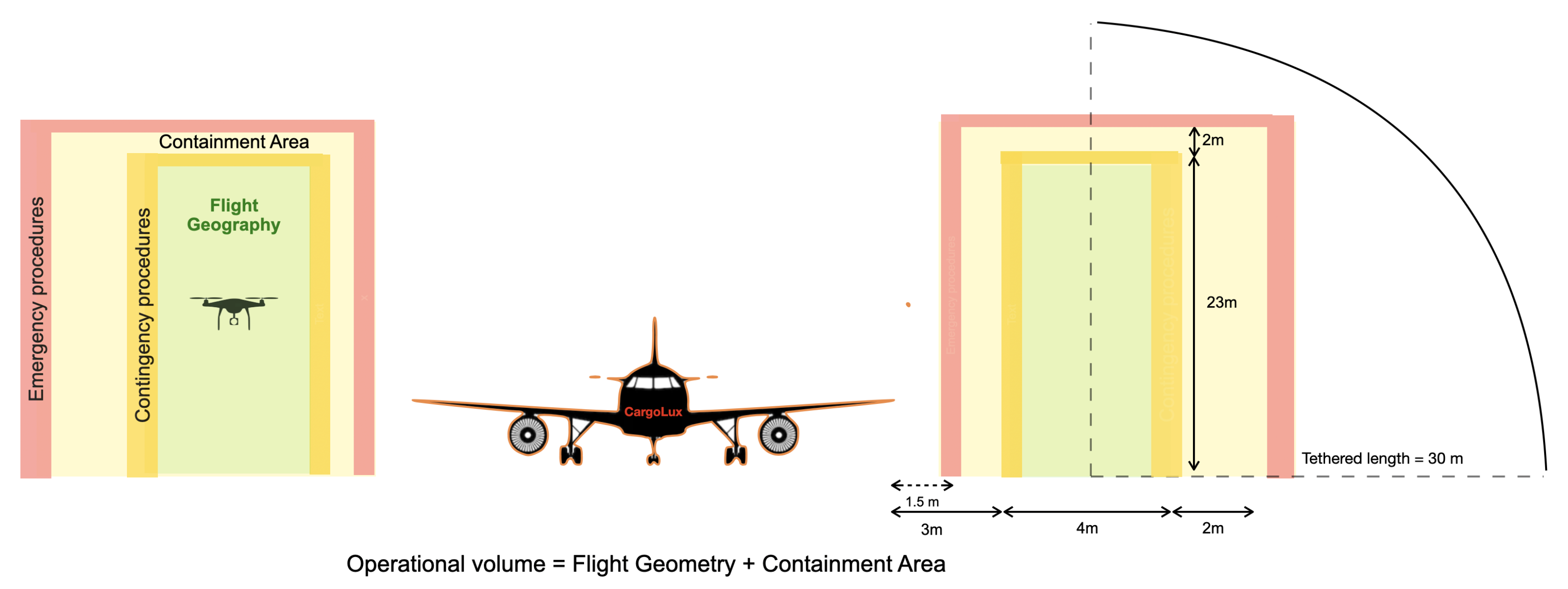
- Each UAS inspected one of the sides of the airframe. During the operation, both UASs shared information about their position. In the event of having trajectories toward each other, exceeding the flight geography described in Figure 2, contingency and emergency procedures would be activated.
- The mission was monitored at all times. An onboard monitoring system controlled the execution of the path. Additionally, the Coordinator, the VOs, the RPIC, and the GCSO monitored the mission visually. The RPIC followed the UAS at VLOS at a safe distance, ready to control the UAS if required. The GCSO received telemetry data to monitor the state of the UAS. The mission could be cancelled at any time by the RPIC or the GCSO.
- The UAS used a tethered system [26] to reduce battery restrictions during the operation and to act as an anchor in case of emergency.
- Once the airframe inspection operation finished, the GCSO activated the landing behavior to finish the mission.
- The Coordinator verified that the mission objectives were achieved. The GCSO transmitted the visual collected data to the GCS or a backup storage device. The crew entered logbook entries recording flight time and other flight details.
4. SORA for Multi-UAS Inspection
4.1. Pre-Application Evaluation
- STS-01: it covers operations in visual line of sight (VLOS), at a maximum height of 120 m, ground speed less than 5 m/s, over controlled ground areas, using a CE class C5 UAS, MTOM <25 kg.
- STS-02: it covers operations beyond visual line of sight (BVLOS), at a maximum height of 120 m, ground speed less than 5 m/s, 2 km max distance from the UAS and visual observers, over controlled ground areas in sparsely populated environments, MTOM <25 kg, using a CE class C6 UAS.
- The operation is conducted in Semi-Autonomous mode, which requires human intervention to activate different behaviors, and autonomous execution of each behavior.
- The operation includes the use of more than one UAS simultaneously.
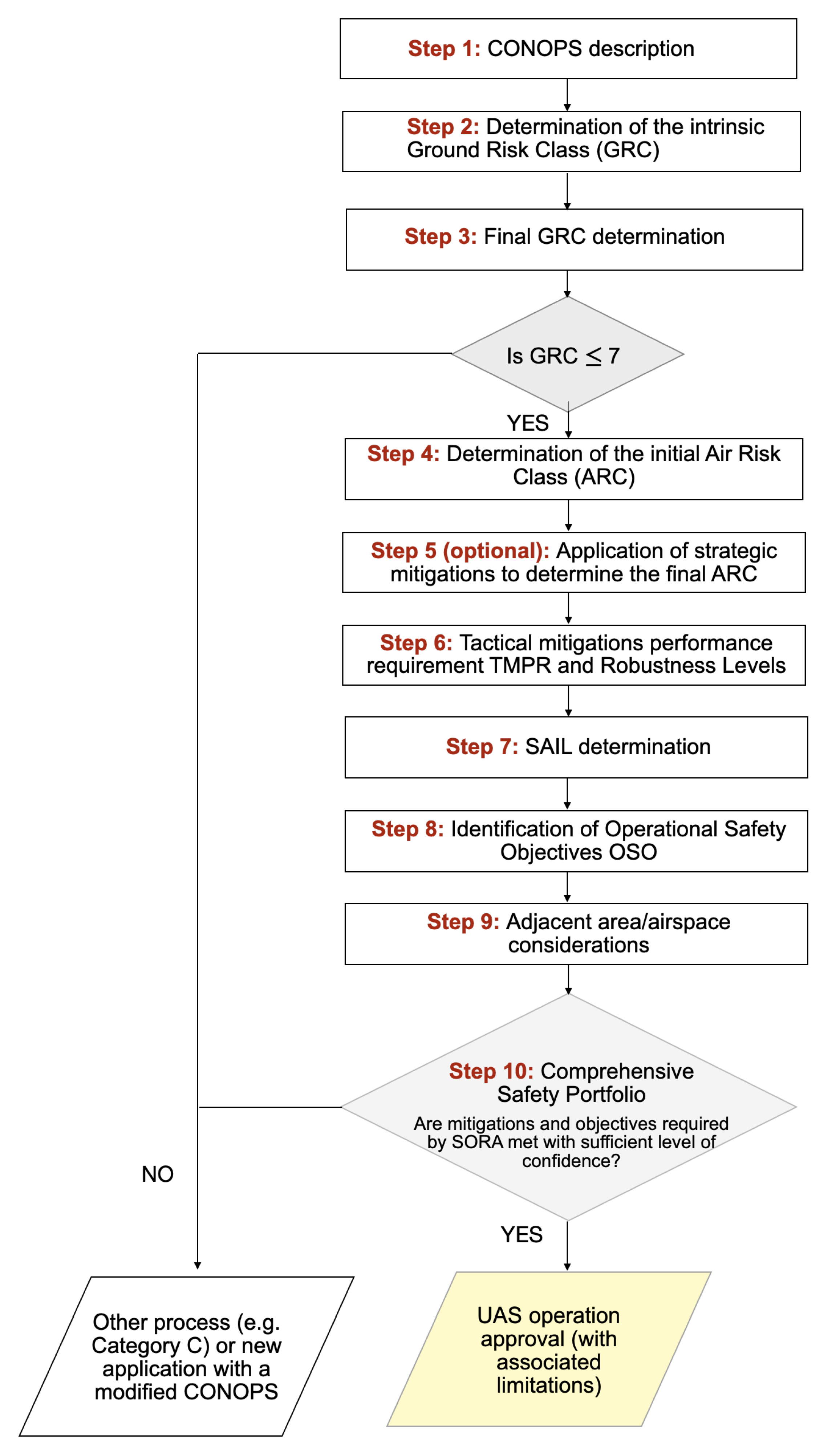
4.2. Step 1: CONOPS Description
4.3. Step 2: Determination of the Intrinsic Ground Risk Class
- The intended operation will be conducted at VLOS.
- The dimension of the UAS is in the range of 1–3 m.
- The kinetic energy is 3.4 KJ.
4.4. Step 3: Final Ground Risk Determination
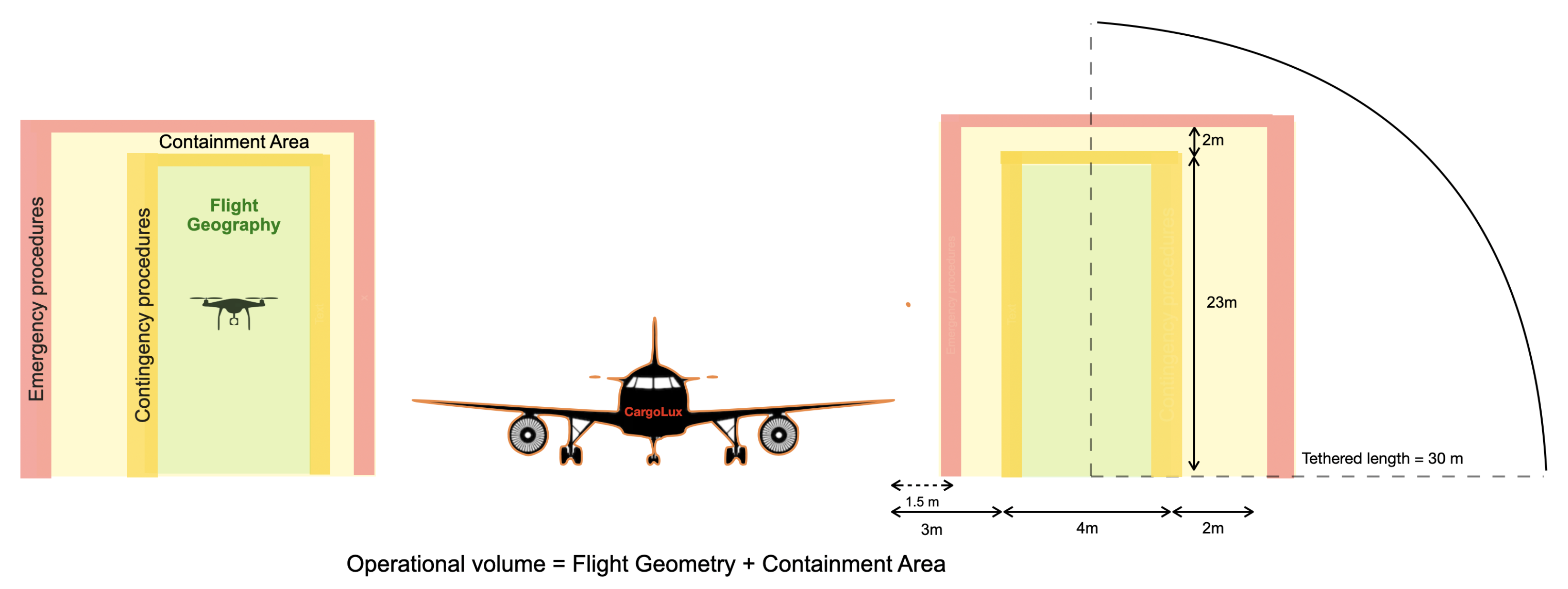
- The length of the tethered system is 60 m which is adequate to contain the operational volume (described in Figure 2). During the operation, the length will be limited to 30 m.
- The specifications of the tethered system shows that the strength of the line is 150 kg of traction, which is adequate to contain the UAS load. The strength of the attachment points is compatible with ultimate loads, and it cannot be cut by rotating propellers. Performance tests of the system are available.
- The tether system corresponds to the one offered by a well-known manufacturer (SAFE-T system from Ellistar [26]), with experience in applying its system to several UAS-based applications in different countries (Sweden, France, Austria, among others).
- The Multi-UAS operation ensures a ground risk buffer with a 1 to 1 rule (if the UAS operates at 23 m, the ground risk buffer is minimum 23 m).
- To reduce the risk of collision with the airframe, the UAS uses calibration and pre-planning strategies that identify the location of the airframe and plans the trajectories, ensuring the airframe is considered a NO-FLY zone.
- The operation will be conducted in a controlled ground area, ensuring that there will be zero non-active participants in the area; participants will be only those in charge of the operation.
- The operation will be conducted at a low speed below 3 m/s. This value is set internally and used so that the calculated trajectories do not exceed this value.
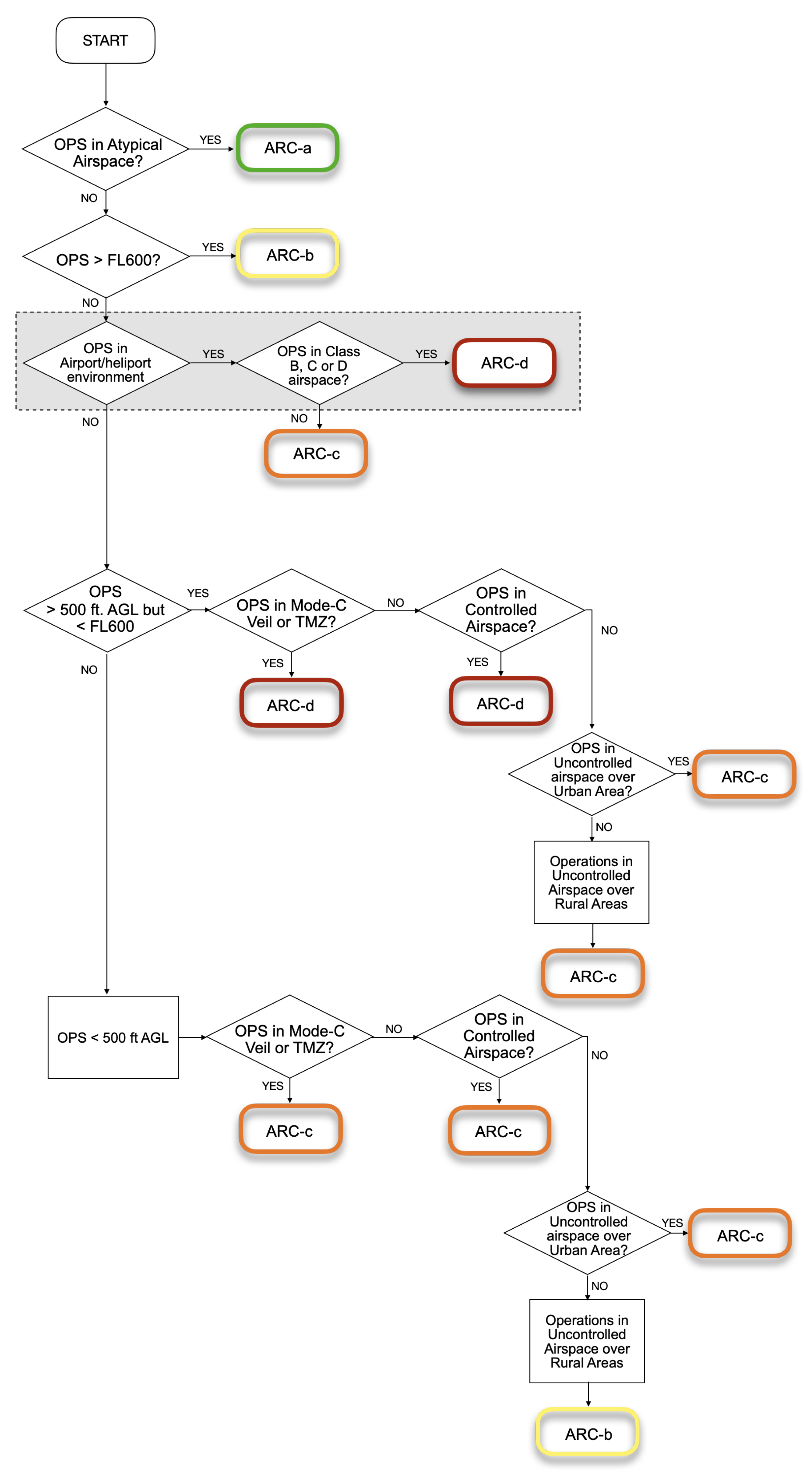
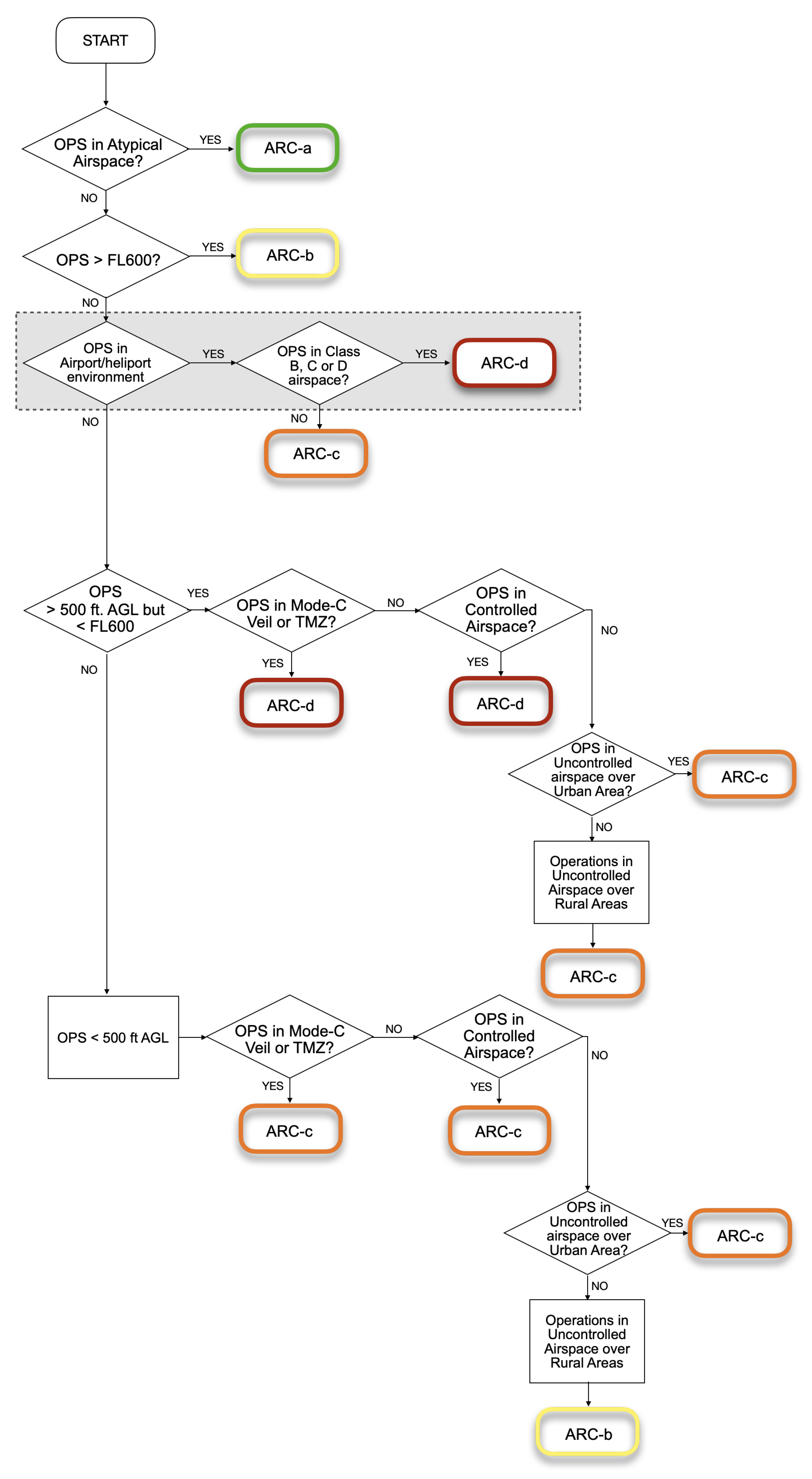
4.5. Step 4: Initial Air Risk Class ARC
4.6. Step 5: Strategic Mitigations to Determine Residual ARC
- The operational volume of each UAS will be restricted, see Figure 2. Apart from the tethered system, each UAS operates on a different side of the airframe at VLL airspace.
- Each UAS will share its current position with the other UAS. During the execution of the different behaviors, this information will be used to monitor the mission (if their relative position corresponds to the one planned). It will also be used to cancel the execution of a specific trajectory if the UASs approach each other beyond the thresholds defined for the mission.
- The density rating of manned aircraft at Luxembourg airport is low [31]. Additionally, The operation will be conducted at VLL (Very Low Level) airspace (max 30 m).
4.7. Step 6: Tactical Mitigation Performance Requirement TMPR and Robustness Levels
- Operating at VLOS is by itself considered acceptable tactical mitigation. According to Section 2.4.4.1, paragraph b (Page 24) from [10]: “Flights under VLOS do not need to meet the tactical mitigations performance requirements nor the tactical mitigation robustness requirements”.
- The crew always includes the Coordinator, the RPIC, the GCSO, and the VOs, which will keep the operation always at VLOS. The Coordinator, the RPIC and/or the VOs are in charge of detecting the aircraft using visual observations (conducting the “see” strategy). On the other hand, the RPIC or the GCSO are responsible for conducting the “avoid” strategy.
4.8. Step 7: SAIL Determination
4.9. Step 8: Identification of Operational Safety Objectives (OSO)
4.10. Step 9: Adjacent Area/Airspace Considerations
- Both UAS are tethered.
- By default, the software running the UAS limits the operational volume that each UAS can fly over, by defining NO-FLY zones.
- The safety features of the UAS from factory ensures the UAS does not leave the operational volume by using flight limits and flight restriction areas, and failsafe functions.
- The operation is conducted at VLOS at VLL airspace.
4.11. Step 10: Comprehensive Safety Portfolio
- OSO #01 (L) The concept of operation developed in the Multi-UAS AFI project included the description of the operational procedures, checklists, maintenance guidelines, training, and responsibilities and duties of the operator (CONOPS Sections 2.1 and 3.3 [25])
- OSO #02, #04, #05 (O according to SORA, but we reached M for Multi-UAS AFI The UAV used in the operation corresponded to a well-known manufacturer (DJI), which demonstrates compliance with different standards and/or regulations [34]. Safety analyses were conducted during preflight and post-flight inspections (CONOPS Sections 3 and 4 [25])
- OSO #03, #07 (L according to SORA, but we reached M for Multi-UAS AFI) Members of the control team have experience to conduct maintenance on the UAS. The Control Team has been trained to perform the UAS inspection following manufacturer procedures. (CONOPS Sections 2 and 4 [25])
- OSO #06, #13 (L) The UAS allowed the control team to monitor the performance of the UAS, GPS signal strength, flying mode, UAS altitude, battery levels, C2 link signal strength, among others. Additionally, the UAS generated different alerts when signals became low. (CONOPS Section 4 [25]).
- OSO #08, #11, #14, #21 (M) Operational procedures were defined for the operation. The Multi-UAS AFI CONOPS compiled preflight, inflight and post-flight procedures (UAS inspections, evaluation of environmental condition, emergency management), normal procedures, and contingency and emergency procedures. Contingency and emergency procedures required the RPIC to take control of the UAS when it was in automatic or autonomous mode. The CONOPS also included information of the limitations of the external systems supporting the operation. The different checklists of the procedures mitigated the risk of potential human errors. Emergency procedures were designed and tested by the manufacturer [35]. Contingency procedures were tested and validated with the PX4 SITL (Software In The Loop) (PX4 Gazebo simulator https://dev.px4.io/v1.9.0_noredirect/en/simulation/ (accessed on 7 October 2021)), CONOPS Sections 3 and 4 [25].
- OSO #09, #15, #22 (L) The crew was made up of people with more than eight years of experience in the operation of UAS from different manufacturers, trained to identify and react to abnormal situations. The crew training program was documented in the CONOPS (Section 2.2 in [35]). It included training in the operational, emergency, and contingency procedures. The RPIC was a certified pilot, whose training included knowledge in UAS regulation, aviation safety, meteorology, among other aspects.
- OSO #10, #12 (L) The autopilot included a module for autonomous emergency management which would guide the UAS to a safe landing point [35].
- OSO#16 (L) The roles and responsibilities of each member of the crew and their role in the procedures were clearly defined. The flight team used communication devices (when required) that enabled active communication of the team during the operation. Remote Crew training covered multi-crew coordination (CONOPS Section 2 [25]).
- OSO#17 (L) The Mission Coordinator ensured the crew was fit to operate before and during the operation.
- OSO#18 (O according to SORA, but we reached L for Multi-UAS AFI) The flight control system incorporated functions that provided automatic protection of the flight envelop. Flying boundaries were specified taking into account the airframe location to define no-fly zones. This information was used by the trajectory planner to plan trajectories only in the allowed areas (CONOPS Section 5 [25]).
- OSO #19 (O according to SORA, but we reach considered L for Multi-UAS AFI) The roles of each member of the crew were clearly defined in the CONOPS. Different checklists mitigated the risk of potential human errors. The crew was trained to follow the procedures and to conduct the checklists (Multi-UAS CONOPS [25]).
- OSO #20 (O according to SORA, but considered L for Multi-UAS AFI) The operation considered the use of a Ground Control Station per UAS with its specific operator. It reduced the operator workload and facilitated the monitoring of the operation. The HMI was used in different flight tests and it was found to be appropriate for the operation, it enabled monitoring of the performance of the UAS and receiving different alerts from the UAS.
- OSO #23 (L) Environmental conditions for safe operation were specified in the CONOPS and the preflight checklist included the evaluation of the conditions.
- OSO#24 (O according to SORA, but considered L for Multi-UAS AFI) The UAS used in the operation was from a well-known manufacturer. The environmental conditions defined in the CONOPS followed the UAS manufacturer (CONOPS Sections 3 and 4 [25]).
5. Discussion
- A critical component for succeeding in applying SORA is the definition of the operation, which requires a balance between succeeding with the mission’s objectives and succeeding in mitigating its risks. When we started analyzing the risk of the operation, we started to distinguish between flying one UAS at a time (relay scenario) or flying two UAS simultaneously (concurrent scenario). After analyzing the SORA for each scenario individually, we found that both strategies resulted in a low-risk operation, and therefore, in this paper, we focused on the concurrent scenario. In light of the new regulatory framework, operators should focus on designing operations from the application and the regulation point of view. Adopting this safety-focused practice will facilitate the approval process and will ensure that the operation is conducted safely.
- The SORA methodology offers standard scenarios for the Open and Specific categories to facilitate the approval process of UAS operations. These are scenarios with precise safety requirements that are difficult to comply with for many operations (e.g., required air and ground risk buffers), and additional efforts are required to justify the pertinence of applying to those scenarios by claiming specific mitigation strategies. The Multi-UAS AFI operation could not use the available standard scenarios mainly because they do not support autonomous or Multi-UAS operations.
- After applying SORA, it was found that the most critical aspect, in terms of risk, of the Multi-UAS AFI operation is related to the place of the operation. The Multi-UAS AFI operation would be conducted in an airport, which corresponds to a high Air Risk Collision class ARC-D (the number of UASs does not affect this classification). However, as suggested by the SORA methodology, it is possible to claim to the competent authorities strategic mitigations to reduce the ARC. For the Multi-UAS AFI operation, the tethered system and the strategic separation of the operational volume of each UAS helped to reduce the risks of the operation. Nevertheless, for Multi-UAS scenarios, SORA should be extended to include the risk of collision among UAS and not solely the ones related to manned aircraft.
- After following the SORA methodology, it was found that the required level of robustness in OSOs related to the UAS and the crew, was lower than the one reached by our operation. It is important to remember that SORA was not explicitly designed for multi-UAS operations. Therefore, the results of SORA should be carefully analyzed and used as a starting point to ensure safety in the operation, especially for the Multi-UAS scenario.
- A drawback found when exploring the SORA methodology was the limited information related to automatic and or autonomous operations with UASs. Most of the available UASs now allow this kind of operation. In this regard, the SORA methodology should be more detailed and provide additional guidance on the safety-related considerations associated with these capabilities.
- The analysis conducted of the new European regulatory framework [9] showed that the Multi-UAS AFI operation fell under the Specific category due to the use of more than one UAS simultaneously with autonomous features. Therefore, a specific operation risk assessment was required for this operation. Following the SORA process recommended by EASA, it was found that the Multi-UAS AFI operation could be conducted, ensuring safety. The final GRC was 2, the final ARC was ARC-b, and the determined SAIL was II, which correspond to low-risk operations. Although the SORA methodology does not explicitly address the operation of multiple UAS, we have found that if it is carefully applied, it can bound the risk of these types of operations.
- This study reveals that the SORA methodology can significantly constrain a multi-robot operation. For the Multi-UAS AFI operation, it was mandatory to segregate the airspace, include physical mechanisms such as the tethering system and reduce the autonomous behaviors of the UAS to keep the risk levels low. Because of this, urgent actions are needed to extend SORA to autonomous Multi-UAS scenarios.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SORA | Specific Operation Risk Assessment |
| OSO | Operational Safety Objectives |
| GRC | Ground Risk Class |
| ARC | Air Risk Class |
| STS | Standard Scenario |
| ERP | Emergency Response Plan |
| AFI | Air Frame Inspeciton |
| ANA | Air Navigation Administration |
| VLL | Very Low Level |
| TMPR | Tactical Mitigation Performance Requirement |
| SAIL | Specific Assurance and Integrity Level |
| CONOPS | Concept of Operations |
| EASA | European Aviation Safety Agency |
| UAV | Unmanned Aerial Vehicle |
| IMU | Inertial Measurement Unit |
| GPS | Global Positioning System |
| RTH | Return to Home |
| GCSO | Ground Control Station Operator |
| VO | Visual Observer |
| VLOS | Visual Line-of-Sight |
| BVLOS | Beyond Visual Line-of-Sight |
| JARUS | Joint Authorities for Rulemaking on Unmanned Systems |
| MTOM | Maximum Takeoff Mass |
| ANSP | Air Navigation Services Provider |
| GCS | Ground Control Station |
| RPIC | Remote Pilot-in-Command |
References
- Robotics 2020. Multi-Annual Roadmap for Robotics in Europe. Horizon 2020 Call ICT-2016. Available online: https://www.eu-robotics.net/sparc/upload/about/files/H2020-Robotics-Multi-Annual-Roadmap-ICT-2016.pdf (accessed on 12 December 2020).
- Jing, W.; Deng, D.; Wu, Y.; Shimada, K. Multi-UAV Coverage Path Planning for the Inspection of Large and Complex Structures. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 1480–1486. [Google Scholar] [CrossRef]
- Schmuck, P.; Chli, M. Multi-UAV collaborative monocular SLAM. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3863–3870. [Google Scholar] [CrossRef] [Green Version]
- Potena, C.; Khanna, R.; Nieto, J.; Siegwart, R.; Nardi, D.; Pretto, A. AgriColMap: Aerial-Ground Collaborative 3D Mapping for Precision Farming. IEEE Robot. Autom. Lett. 2019, 4, 1085–1092. [Google Scholar] [CrossRef] [Green Version]
- Abdelkader, M.; Shaqura, M.; Claudel, C.G.; Gueaieb, W. A UAV based system for real time flash flood monitoring in desert environments using Lagrangian microsensors. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 25–34. [Google Scholar] [CrossRef]
- Bailon-Ruiz, R.; Lacroix, S.; Bit-Monnot, A. Planning to Monitor Wildfires with a Fleet of UAVs. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4729–4734. [Google Scholar] [CrossRef] [Green Version]
- Alotaibi, E.T.; Alqefari, S.S.; Koubaa, A. LSAR: Multi-UAV Collaboration for Search and Rescue Missions. IEEE Access 2019, 7, 55817–55832. [Google Scholar] [CrossRef]
- Scherer, J.; Rinner, B. Multi-UAV Surveillance With Minimum Information Idleness and Latency Constraints. IEEE Robot. Autom. Lett. 2020, 5, 4812–4819. [Google Scholar] [CrossRef]
- EASA. Easy Access Rules for Unmanned Aircraft Systems (Regulations (EU) 2019/947 and (EU) 2019/945). In European Union Easa E-Rules. Available online: https://www.easa.europa.eu/document-library/easy-access-rules/easy-access-rules-unmanned-aircraft-systems-regulation-eu#group-publications (accessed on 10 January 2020).
- JARUS. JARUS Guidelines on Specific Operations Risk Assessment (SORA) V2.0. Available online: http://jarus-rpas.org/sites/jarus-rpas.org/files/jar_doc_06_jarus_sora_v2.0.pdf (accessed on 10 July 2021).
- University of York, Safe Airframe Inspection using Multiple UAVs (SAFEMUV). Available online: https://www.york.ac.uk/assuring-autonomy/projects/unmanned-aerial-vehicles-safety/ (accessed on 3 October 2020).
- Capitán, C.; Capitán, J.; Castano, A.R.; Ollero, A. Risk Assessment based on SORA Methodology for a UAS Media Production Application. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 451–459. [Google Scholar] [CrossRef]
- Miles, T.; Suarez, B.; Kunzi, F.; Jackson, R. SORA Application to Large RPAS Flight Plans. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Terkildsen, K.H.; Jensen, K. Towards a Tool for Assessing UAS Compliance with the JARUS SORA Guidelines. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 460–466. [Google Scholar] [CrossRef]
- JARUS. JARUS Guidelines on Specific Operations Risk Assessment (SORA) V1.0. Available online: https://rpas-regulations.com/wp-content/uploads/2017/07/170626_JARUS_SORA_Annex-1_Glossary_v1.0.pdf (accessed on 10 August 2020).
- Denney, E.; Pai, G.; Johnson, M. Towards a Rigorous Basis for Specific Operations Risk Assessment of UAS. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Janik, P.; Zawistowski, M.; Fellner, R.; Zawistowski, G. Unmanned Aircraft Systems Risk Assessment Based on SORA for First Responders and Disaster Management. Appl. Sci. 2021, 11, 5364. [Google Scholar] [CrossRef]
- European Union Aviation Safety Agency. IP 122 Clarification of Definitions for General Visual (GVI), Detailed (DET), and Special Detailed (SDI) Inspections. Available online: https://www.easa.europa.eu/document-library/imrbpb-issue-papers/ip-122 (accessed on 3 October 2020).
- Vora, J.; Nair, S.; Gramopadhye, A.K.; Duchowski, A.T.; Melloy, B.J.; Kanki, B. Using virtual reality technology for aircraft visual inspection training: Presence and comparison studies. Appl. Ergon. 2002, 33, 559–570. [Google Scholar] [CrossRef]
- Malandrakis, K.; Savvaris, A.; Domingo, J.A.G.; Avdelidis, N.; Tsilivis, P.; Plumacker, F.; Fragonara, L.Z.; Tsourdos, A. Inspection of Aircraft Wing Panels Using Unmanned Aerial Vehicles. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018; pp. 56–61. [Google Scholar] [CrossRef] [Green Version]
- Hrúz, M.; Bugaj, M.; Novák, A.; Kandera, B.; Badánik, B. The Use of UAV with Infrared Camera and RFID for Airframe Condition Monitoring. Appl. Sci. 2021, 11, 3737. [Google Scholar] [CrossRef]
- Interdisciplinary Centre for Security, Reliability and Trust. Airframe Inspection (AFI) Project; University of Luxembourg: Luxembourg, 2018. [Google Scholar]
- Dentler, J.; Kannan, S.; Bezzaoucha Rebaï, S.; Olivares-Mendez, M.; Voos, H. Model predictive cooperative localization control of multiple UAVs using potential function sensor constraints. Auton. Robot. 2018. [Google Scholar] [CrossRef] [Green Version]
- Donecle. Available online: https://www.donecle.com/ (accessed on 3 July 2021).
- Deliverable D1.1 of SAFEMUV Project. Concept of Operations; Assuring Autonomy International Programme (AAIP). Available online: https://drive.google.com/file/d/1z6d0PhiVUYv6qvdAbwE13CYtwTknUDgD/view (accessed on 23 November 2021).
- Elistair. ELISTAIR, The Tethered Drone Company. Available online: https://elistair.com/safe-t-tethered-drone-station/ (accessed on 20 October 2020).
- DJI. Matrice 600 User Manual. Available online: https://dl.djicdn.com/downloads/m600/20170717/Matrice_600_User_Manual_v1.0_EN.pdf (accessed on 15 October 2020).
- DJI. DJI Ronin-MX Gimbal. Available online: https://www.dji.com/lu/ronin-mx (accessed on 15 October 2020).
- EASA Opinion 05/2019. Standard scenarios for UAS operations in the specific category. In European Union EASA E-Rules; EASA: Cologne, Germany, 2020. [Google Scholar]
- JARUS. Annex B: Integrity and Assurance Levels for the Mitigations Used to Reduce the Intrinsic Ground Risk Class. Available online: http://jarus-rpas.org/sites/jarus-rpas.org/files/jar_doc_06_jarus_sora_annex_b_v1.0.pdf (accessed on 25 January 2021).
- LSSIP 2019 Luxembourg. Local Single Sky Implementation. Available online: https://www.eurocontrol.int/sites/default/files/2020-04/eurocontrol-lssip-2019-luxembourg-level1.pdf (accessed on 12 December 2020).
- JARUS. Annex C: Strategic Mitigation Collision Risk Assessment. Available online: http://jarus-rpas.org/sites/jarus-rpas.org/files/jar_doc_06_jarus_sora_annex_c_v1.0.pdf (accessed on 25 January 2021).
- JARUS. Annex E: Integrity and Assurance Levels for the Operation Safety Objectives (OSO). Available online: http://jarus-rpas.org/sites/jarus-rpas.org/files/jar_doc_06_jarus_sora_annex_e_v1.0_.pdf (accessed on 15 February 2021).
- DJI Matrice 600 Declaration of Conformity. Available online: https://d15bfve0bne4ko.cloudfront.net/Industrial/M600.pdf (accessed on 10 December 2020).
- DJI. Matrice 600 Safety Guidelines. Available online: https://dl.djicdn.com/downloads/m600/20170717/Matrice_600_Disclaimer_and_Safety_Guidelines_v1.2_EN.pdf (accessed on 5 October 2020).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | DJI Matrice 600 |
| Size | 1668 mm × 1518 mm × 759 mm (unfolded) |
| MTOM | 15.1 kg |
| Mx up-speed | 5 m/s |
| Mx down-speed | 3 m/s |
| Mx cruise speed | 18 m/s (without wind) |
| Max wind speed | 8 m/s |
| GPS RTK | Yes |
| RC and communication | Lightbridge 2 |
| FCU | DJI A3 |
| Tethered system | Elistair SAFE-T |
| Camera | Canon EOS 5DS R high resolution camera 50.6 Megapixel MP |
| Gimbal | DJI Ronin-MX gimbal [28] |
| Computer 1 | Raspberry Pi for medium level control system |
| Computer 2 | Nvidia Jetson for image acquisition. |
| Computer 3 | Intel NUC computer dedicated to High Level tasks such as path, trajectory planning, and collision avoidance |
| Operation | Airframe inspection |
| Category (EASA) | Specific |
| Location | Luxembourg airport |
| Type of airspace | Controlled |
| Type of operation | VLOS over controlled ground area |
| Flight conditions | Daytime and good weather conditions. |
| Max MTOM | 15.1 kg |
| Kinetic energy | 3.4 KJ |
| UAS category | C3 |
| UAS dimension | 1668 mm × 1518 mm × 759 mm |
| Max speed | 1 m/s |
| Flight geography limits | 3 m wrt airframe, 23 m above ground |
| Mode of operation | semi-autonomous |
| Use of visual observers | Yes |
| Number of UAS | 2 |
| Number of RPIC | 2 |
| Tethered | Yes |
| Min image resolution | 2 Megapixel |
| Min image overlap | 35% overlap |
| Min number of images acquired per point | 3 images |
| Mitigations for Ground Risk | Robustness | ||
|---|---|---|---|
| Low/None | Medium | High | |
| M1—Strategic mitigations for ground risk | 0: None −1: Low | −2 | −4 |
| M2—Effects of ground impact are reduced | 0 | −1 | −2 |
| M3—An Emergency Response Plan (ERP) is in place, operator validated and effective | 1 | 0 | −1 |
| Initial Generalized Density Rating for the Environment | Initial ARC | If the Local Density Can Be Demonstrated to Be Similar to | New Lowered Residual ARC |
|---|---|---|---|
| 5 | ARC-d | 4 or 3 | ARC-c |
| 2 or 1 | ARC-b | ||
| 4 | ARC-d | 3 or 2 | ARC-c |
| 1 | ARC-b | ||
| 3 | ARC-c | 1 | ARC-b |
| 2 | ARC-c | 1 | ARC-b |
| 3 | ARC-c | 1 | ARC-b |
| 2 | ARC-c | 1 | ARC-b |
| Residual ARC | ||||
|---|---|---|---|---|
| Final GRC | a | b | c | d |
| ≤2 | I | II | IV | VI |
| 3 | II | II | IV | VI |
| 4 | III | III | IV | VI |
| 5 | IV | IV | IV | VI |
| 6 | V | V | V | VI |
| 7 | VI | VI | VI | VI |
| >7 | Category C operation | |||
| OSO ID | Description | SAIL | |||||
|---|---|---|---|---|---|---|---|
| I | II | III | IV | V | VI | ||
| Technical Issue with the UAS | |||||||
| OSO#01 | Ensure the operator is competent and/or proven | O | L | M | H | H | H |
| OSO#02 | UAS manufactured by competent and/or proven entity | O | O | L | M | H | H |
| OSO#03 | UAS maintained by competent and/or proven entity | L | L | M | M | H | H |
| OSO#04 | UAS developed to authority recognized design standards | O | O | O | L | M | H |
| OSO#05 | UAS is designed considering system safety and reliability | O | O | L | M | H | H |
| OSO#06 | C3 link performance is appropriate for the operation | O | L | L | M | H | H |
| OSO#07 | Inspection of the UAS (product inspection) to ensure consistency to the ConOps | L | L | M | M | H | H |
| OSO#08 | Operational procedures are defined, validated, and adhered to | L | M | H | H | H | H |
| OSO#09 | Remote crew trained and current and able to control the abnormal situation | L | L | M | M | H | H |
| OSO#10 | Safe recovery from technical issue | L | L | M | M | H | H |
| Deterioration of external systems supporting UAS operation | |||||||
| OSO#11 | Procedures are in place to handle the deterioration of external systems supporting UAS operation | L | M | H | H | H | H |
| OSO#12 | The UAS is designed to manage the deterioration of external systems supporting UAS operation | L | L | M | M | H | H |
| OSO#13 | External services supporting UAS operations are adequate to the operation | L | L | M | H | H | H |
| Human Error | |||||||
| OSO#14 | Operational procedures are defined, validated, and adhered to | L | M | H | H | H | H |
| OSO#15 | Remote crew trained and current and able to control the abnormal situation | L | L | M | M | H | H |
| OSO#16 | Multi crew coordination | L | L | M | M | H | H |
| OSO#17 | Remote crew is fit to operate | L | L | M | M | H | H |
| OSO#18 | Automatic protection of the flight envelope from Human Error | O | O | L | M | H | H |
| OSO#19 | Safe recovery from Human Error | O | O | L | M | M | H |
| OSO#20 | A Human Factors evaluation has been performed and the HMI found appropriate for the mission | O | L | L | M | M | H |
| Adverse operating conditions | |||||||
| OSO#21 | Operational procedures are defined, validated, and adhered to | L | M | H | H | H | H |
| OSO#22 | The remote crew is trained to identify critical environmental conditions and to avoid them | L | L | M | M | M | H |
| OSO#23 | Environmental conditions for safe operations defined, measurable, and adhered to | L | L | M | M | M | H |
| OSO#24 | UAS designed and qualified for adverse environmental conditions | O | O | M | H | H | H |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinez, C.; Sanchez-Cuevas, P.J.; Gerasimou, S.; Bera, A.; Olivares-Mendez, M.A. SORA Methodology for Multi-UAS Airframe Inspections in an Airport. Drones 2021, 5, 141. https://doi.org/10.3390/drones5040141
Martinez C, Sanchez-Cuevas PJ, Gerasimou S, Bera A, Olivares-Mendez MA. SORA Methodology for Multi-UAS Airframe Inspections in an Airport. Drones. 2021; 5(4):141. https://doi.org/10.3390/drones5040141
Chicago/Turabian StyleMartinez, Carol, Pedro J. Sanchez-Cuevas, Simos Gerasimou, Abhishek Bera, and Miguel A. Olivares-Mendez. 2021. "SORA Methodology for Multi-UAS Airframe Inspections in an Airport" Drones 5, no. 4: 141. https://doi.org/10.3390/drones5040141
APA StyleMartinez, C., Sanchez-Cuevas, P. J., Gerasimou, S., Bera, A., & Olivares-Mendez, M. A. (2021). SORA Methodology for Multi-UAS Airframe Inspections in an Airport. Drones, 5(4), 141. https://doi.org/10.3390/drones5040141