2.1. Fixed-Wing UAVs for Magnetic Surveys
Anderson and Pita [
55] introduced the fixed-wing UAV GeoRanger which was designed by Fugro for the petroleum and mining industries. The GeoRanger has an endurance of over 10 h and a cruising speed of 75 km/h, which can be operated from undeveloped sites near survey areas using the launch and recovery systems. The GeoRanger was the first deployment of UAVs to map the magnetic field fluctuations of the southwestern Pacific Ocean [
56], the results demonstrated that it could provide a valuable complement to marine magnetic surveys with higher data coverage. At the same time, a British company, Magsurvey Ltd., launched the Prion, which was targeted for use in oil, gas, and mineral exploration, as noted in [
57].
Several UAVs have been developed by Carleton University cooperated with Sander Geophysics Ltd., since 2009, such as the Corvus and GeoSurv II, both were designed to be simple, robust, easy to assemble, and low cost. Surveys were carried out by Wells [
58], Forrester [
59], and Caron et al. [
60], and results showed that data obtained by this UAV magnetic system have a higher resolution than the conventional fixed-wing data and a similar resolution to that of the ground survey data.
Funaki et al. [
61,
62] developed six types of UAVs from 2008 to 2014 as part of the Ant-Plane project for scientific research in the coastal region of Antarctica; an onboard 3-axis magneto-resistant magnetometer was used to record variations in the magnetic field with an accuracy of 10 nT, a continuous flight of 500 km was achieved by Ant-Plane 4-1, with a maximum flight altitude of 5690 m. A magnetic anomaly map of Deception Island displayed higher resolution than the marine anomaly maps, which proved to be feasible and cost-effective for Antarctic research.
Glen et al. [
63] tested a new system to collect magnetic data using NASA’s SIERRA UAV. This system was deployed in Surprise Valley, CA, to perform a reconnaissance survey of the entire valley as well as detailed surveys in key transition zones. A cesium vapor magnetometer was installed on the wingtip to situate it far from the fuselage which contained the most magnetic components of the aircraft. Ground magnetic surveys were performed first using both handheld and vehicle-based systems; a total of 960 km-line ground magnetic data were collected over 60 days, and the results showed a narrow magnetic high extending for several tens of kilometers that reflects the presence of a buried intra-basin structure with no surface expression. However, gaps in ground data coverage, particularly around the hot springs, make it difficult to determine the characteristics of the structure. Over 1390 km-line data were collected using NASA’s SIERRA UAV with a flight altitude of 150 m, several detailed surveys were conducted with a line spacing of 200 m. Detailed features of the intra-basin high, particularly near the hot springs, can be obtained by combining the ground and the UAV magnetic surveys. The hot springs closely correspond to major breaks or bends in the anomaly, suggesting that the feature is integral to the plumbing of the hydrothermal system.
Li et al. [
64] described a middle-size fixed-wing UAV modified by the Institute of Geophysical and Geochemical Exploration (IGGE) as an integrated geophysical survey system equipped with a cesium vapor magnetometer and a gamma-ray spectrometer. A 3000 km-line survey of Treasure Mountain mine area in northwestern Heilongjiang, China, was carried out and the data quality of the field survey was comparable to the traditional manned airborne surveys. The dynamic noise level of the magnetic data was less than 0.065 nT, and the residual peak position was less than 1%. Results showed that the CH-3 UAV integrated geophysical survey system has more high-quality data than the traditional survey systems.
Wood et al. [
65] conducted an experimental survey in southern Alberta, Canada, using a large fixed-wing UAV, the Venturer, which was manufactured by Stratus Aeronautics for aeromagnetic surveying. The survey lines were pre-programmed, and the flight was stable, only requiring operator intervention for takeoff and landing. The noise envelope for the magnetic data acquired during the survey was approximately ±0.05 nT, allowing a high-quality total magnetic intensity (TMI) map to be created.
Jackisch et al. [
66] used a composite material fixed-wing UAV equipped with a fluxgate magnetometer to conduct magnetic surveys. With 2.5 m wingspan and flight endurance of roughly 3 h, this fixed-wing UAV magnetic system can easily cover outcrops at square kilometer scales. The northern extension of the Siilinjärvi apatite mine in Finland in a brownfield exploration setting with plenty of ground truth data available was chosen as a case study site. The subsurface geometry of the mine can be investigated through modeling based on UAV-magnetic data interpretation, meanwhile increasing efficiency, maximizing the safety of the resource extraction process, and reducing expenses and incidental wastes.
Ju et al. [
67] analyzed the flight safety and data acquisition effect of the CH-4 UAV, which is a long-endurance UAV developed based on the CH-3, experimental results showed that the CH-4 can perform aeromagnetic survey tasks safely and effectively after reformation.
Several fixed-wing UAVs have been launched by Mobile Geophysical Technologies (MGT) and GEM Systems to fulfill the requirement of higher measurement accuracy as well as sufficient proximity of surveys to the ground. The “Fixed Wing Mag System” developed by MGT is based on a fixed-wing UAV equipped with a sensitive fluxgate magnetometer which is ideal for geomagnetic measurements [
68]. The MONARCH fixed-wing gradiometer utilizes 2 GSMP-35U/25U high sensitivity optically pumped magnetometers (OPMs) to provide gradient survey capability, as noted in [
69], this system requires a short take-off and landing area, and can fly at a speed of 70 km/h for 1 h.
Table 1 summarizes the reviewed literature on fixed-wing UAV applications to magnetic surveys. Among the 15 papers and online websites examined, 6 applied a scalar total field magnetometer, 2 applied two scalar magnetometers, 3 applied a vector magnetometer, the other applied both scalar and vector magnetometers.
2.2. Unmanned Helicopters for Magnetic Surveys
Versteeg et al. [
70] proposed a feasibility study for an autonomous UAV-magnetometer system, components of a helicopter UAV-magnetometer system were investigated, and several commercially available helicopters were introduced for selection. Magnetic signature associated with UAV helicopters was analyzed and compensation of moving platform was carried out. The Yamaha RMAX and the Autocopter were selected to conduct UAV magnetic surveys. McKay et al. [
71] then chose a modular approach for which only the availability of remote-control rotorcraft needs to be required, i.e., the Maxi-Jocker and the Mongoose. Several field tests were undertaken to access both the feasibility of modular component integration into a system and the performance of different aspects of autonomous unmanned helicopters. First, the feasibility of an autonomous unmanned helicopter to perform terrain following and support magnetometer integration was assessed. Second, the determination of the flight controller’s performance to a boom structure mounted on the unmanned helicopter was evaluated. Lastly, collection of high-quality magnetic data from modular “Helimag” system was completed. Field tests were conducted to evaluate the detection ability of the proposed “Helimag” system. Results showed that the “Helimag” system was able to detect all targets, and the data quality was comparable to that of the manually collected ground data.
Eck and Imbach [
72] described the sensor integration, automatic mission planning, and data analysis of a high-resolution helicopter UAV magnetic system. An autonomous Scout B1-100 helicopter equipped with a fluxgate magnetometer was designed, and the mission planning was described in detail with the goal to automatically generate an appropriate mission profile. The initial flight tests were performed in Switzerland and Germany; besides, a real-world field experiment was carried out under challenging weather conditions (e.g., wind gusts, snow fall) in an open mining in Turkey where landslides occurred with various cars and vans having been buried. The results of magnetic maps indicated the possible locations of ferromagnetic objects.
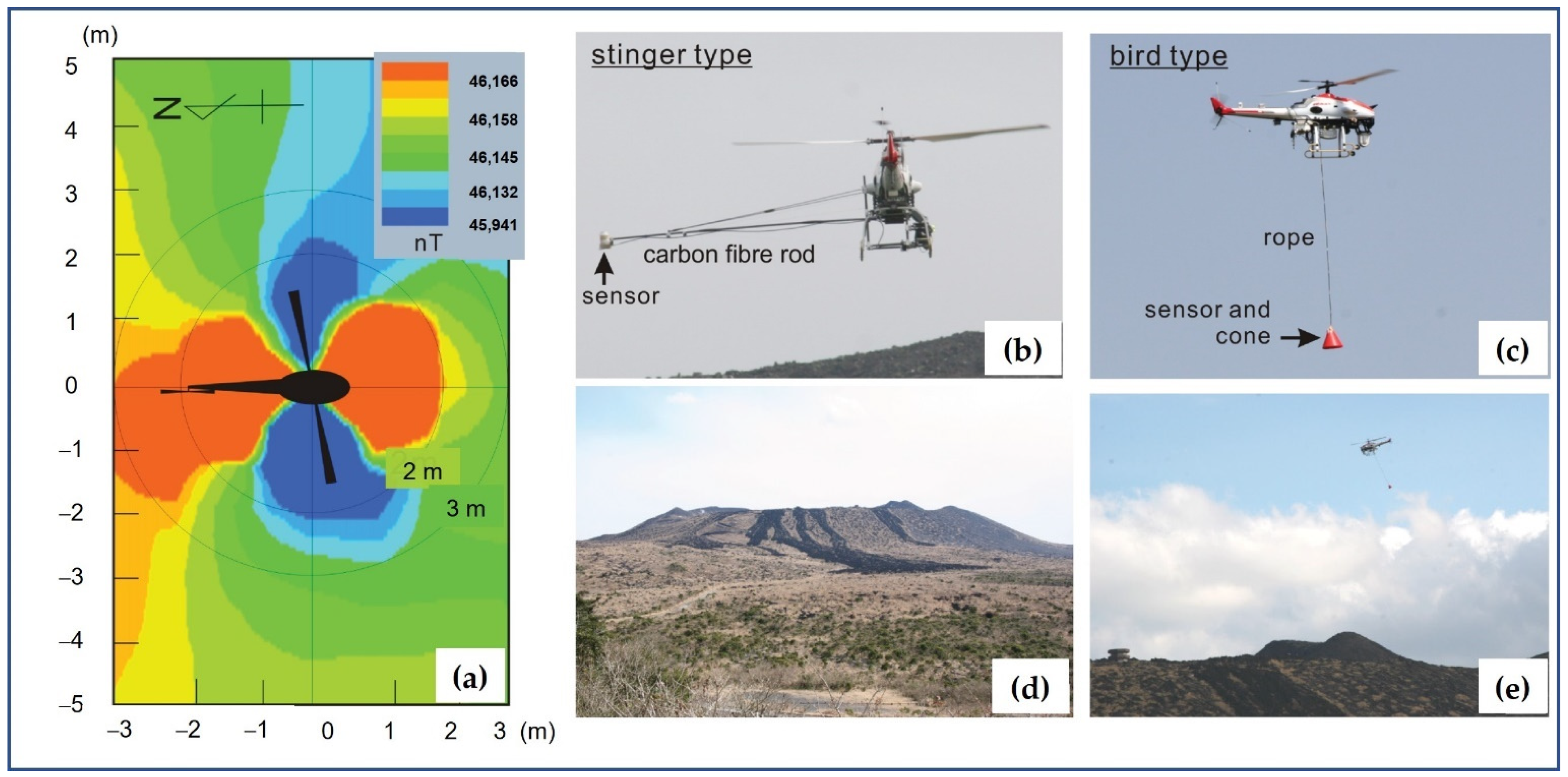
Koyama et al. [
40] conducted magnetic surveys using an autonomous helicopter over the Shinmoe-dake summit crater to investigate the magnetization of that area and changes in the magnetic field associated with an eruption. A commercial UAV, RMAX-G1 developed by Yamaha-Motor Co., Ltd., was adopted as the platform. A cesium OPM was connected to the helicopter with a 4.5 m-long cable to avoid magnetic interference as much as possible. The average magnetization intensity around Shinmoe-dake is 1.5 A/m, suggesting that the volcanic edifice is covered with relatively new volcanic material, the differences in the TMI observed between two experiments show positive and negative magnetic anomalies in the south and north of the Shinmoe-dake edifice, respectively. This helicopter UAV magnetic system was also used by Hashimoto et al. [
73] to conduct surveys over Tarumae Volcano, northern Japan. Results suggested that an order of 10 nT temporal changes can be detected through a direct comparison between separate surveys by means of such a system rather than by upward continuation to a common surface.
Stoll [
74] analyzed some of the UAV options that a magnetometer sensor system can be used in conducting rapid near-surface geophysical measurements. A UAV-based magnetic survey was carried out to detect the locations of electric engines and mass debris buried due to landslides, the effectiveness was demonstrated through case study results.
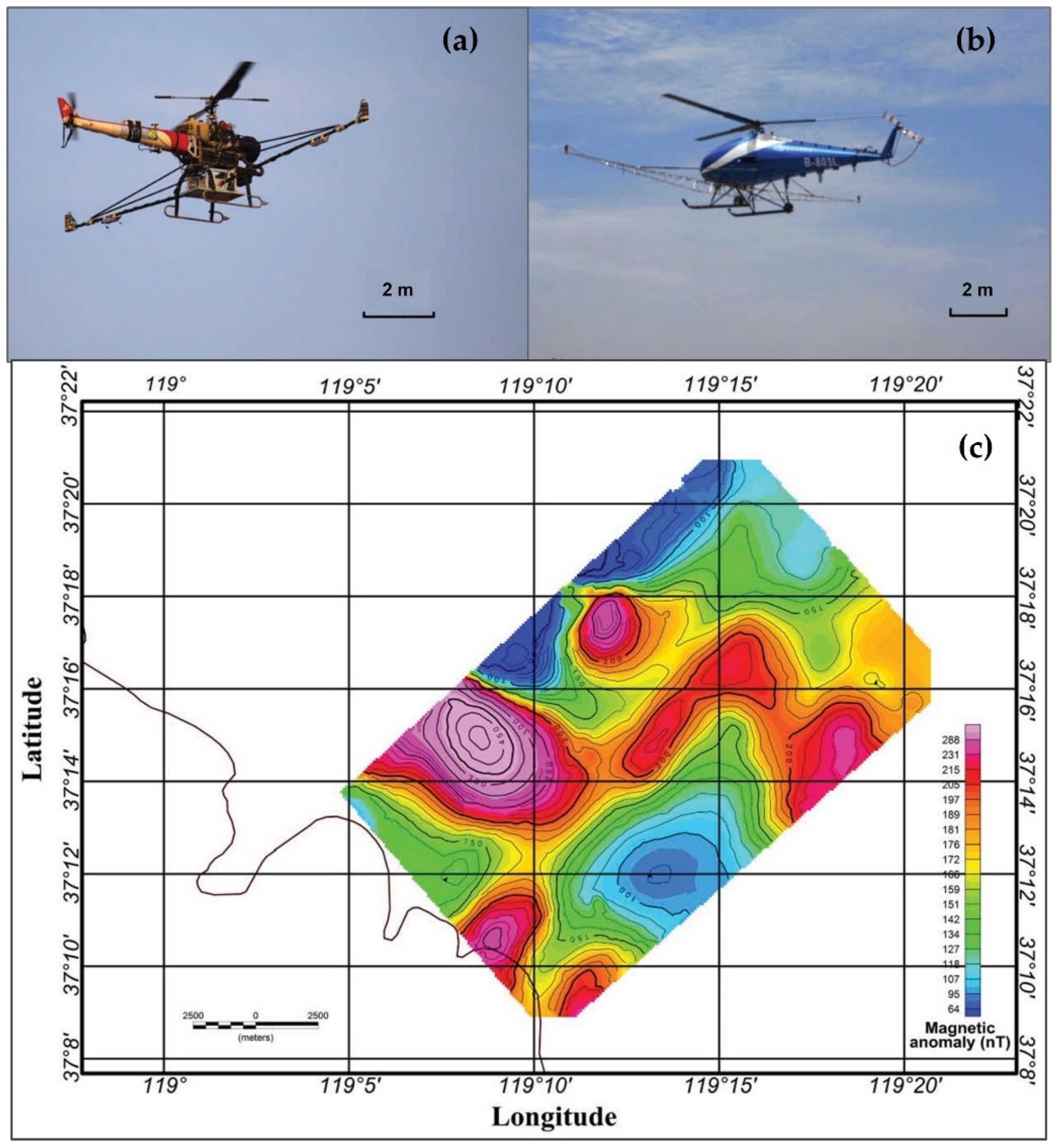
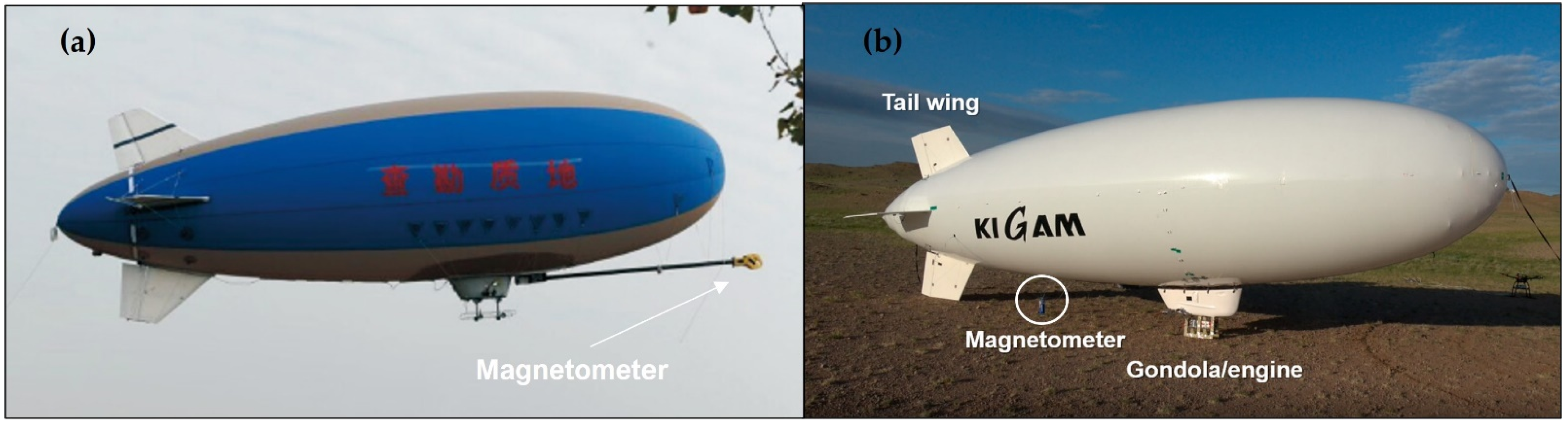
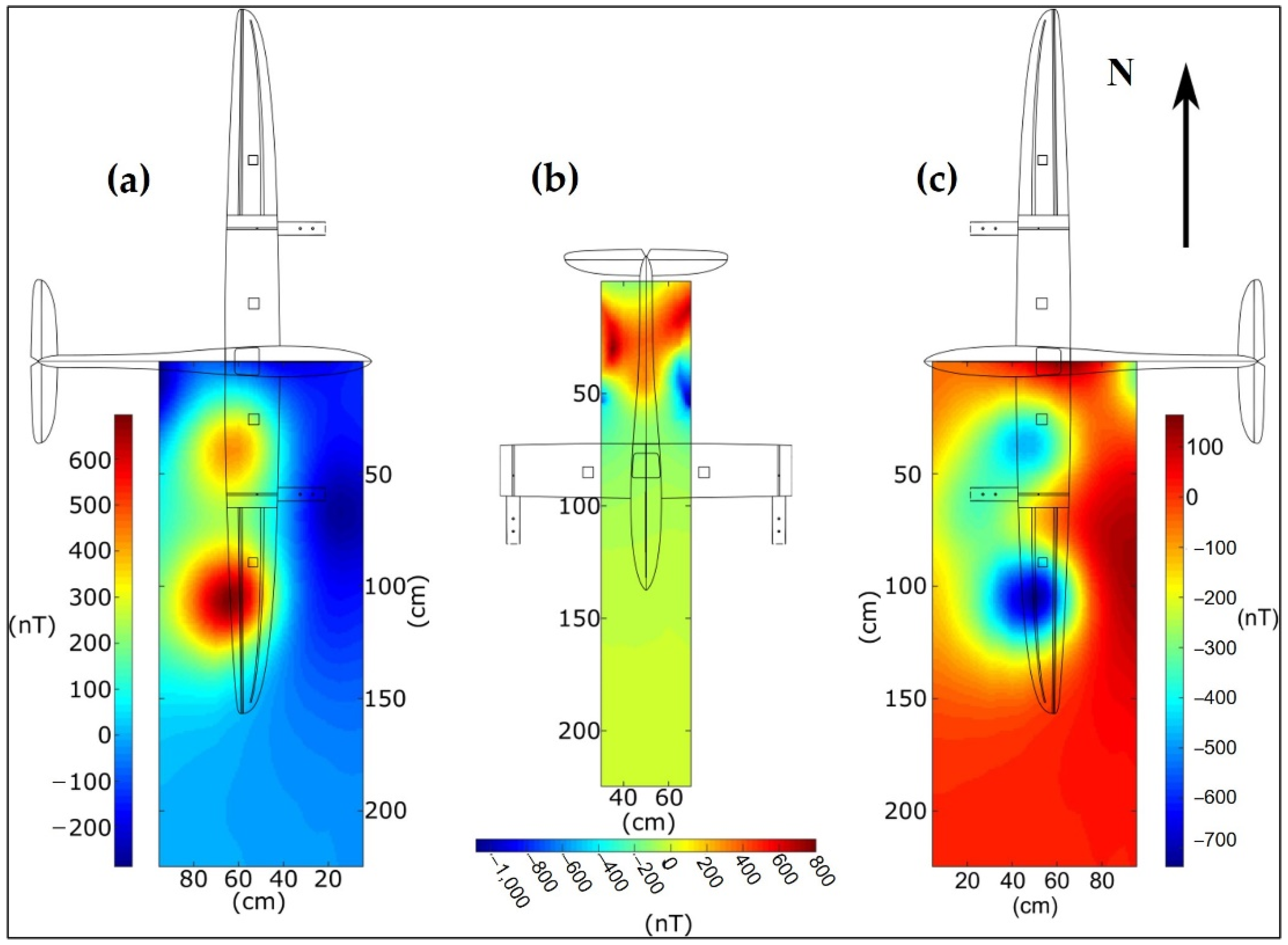
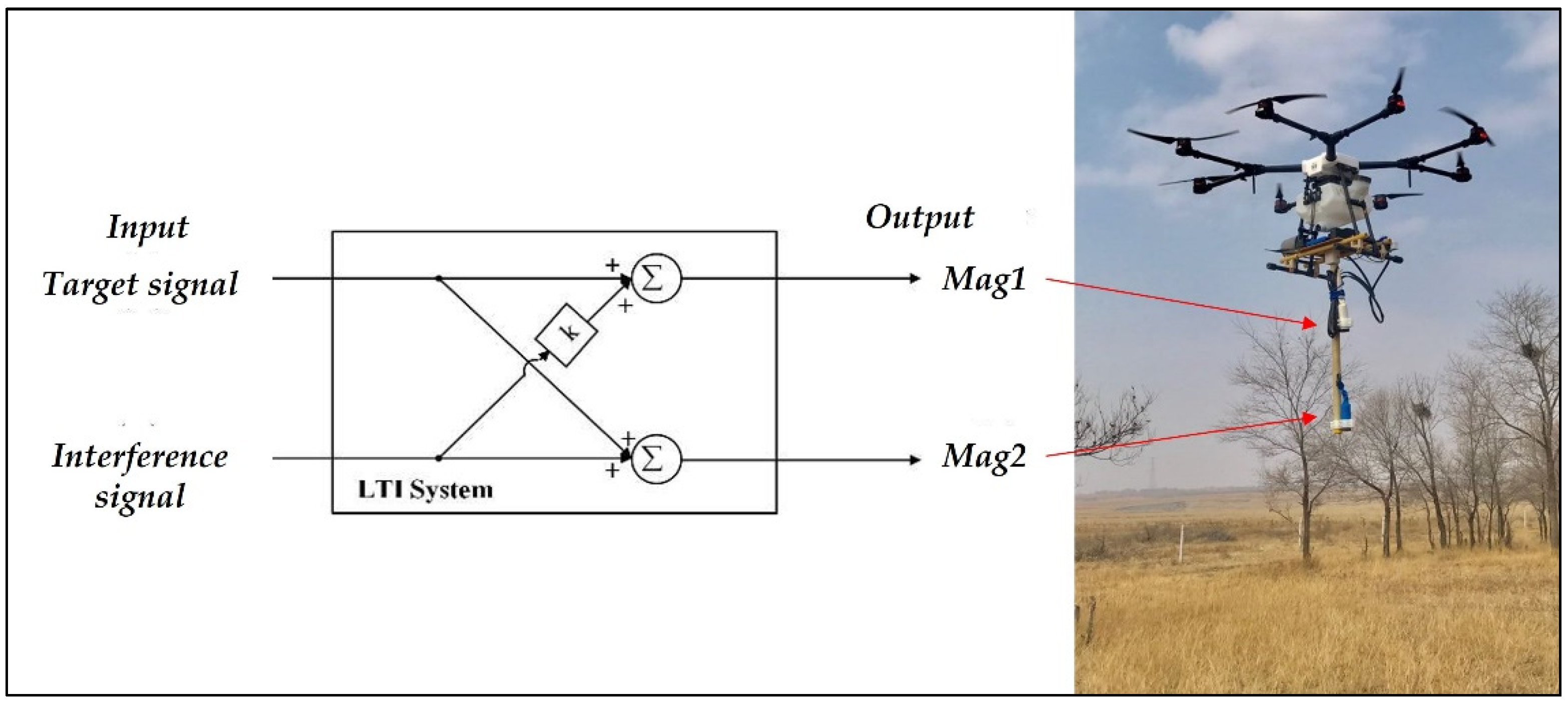
Pei et al. [
75] developed a UAV magnetic survey system based on two kinds of unmanned helicopters with strong wind resistance and long endurance. An OPM and a vector magnetometer for magnetic compensation are horizontally mounted on two sides of the unmanned helicopter in axial symmetry, both magnetometers are connected to the UAV with magnetic stingers made of carbon fiber material, as shown in
Figure 3. A beach–shallow sea transition zone, for which it is relatively difficult to perform land and marine geomagnetic surveys, in the west of Bohai Sea was selected, experiments were conducted in June 2013, with an airspeed of 90 km/h and a flight altitude about 300 m AGL. Data of 27 survey lines with length and line-spacing of 20 km and 600 m, respectively, were obtained. Magnetic compensation and diurnal variation correction were carried out as part of the data processing program. A two-dimensional contour plot can be obtained after gridding using the Kriging method (see
Figure 3); the most pronounced magnetic anomaly feature in the area is an approximately SN-trending anomaly zone twisting and dislocating the anomaly area, which is a typical magnetic anomaly response to faulting. Results of data accuracy and resolution were shown to be comparable to that of marine geomagnetic survey data, thus proving that this system is suitable for magnetic surveying over beach–shallow sea transition areas.
Zhang et al. [
76] adopted a WH-110A equipped with a cesium OPM, a fluxgate magnetometer, and an AARC51 compensator to form a helicopter-magnetic system. Several experiments were conducted to test the capacity of the probe, magnetic interference of the helicopter, and compensation flight. Results obtained by the helicopter UAV system were highly consistent with the ground magnetic surveys, which proved that the helicopter UAV magnetic system can be widely used in large-scale geophysical explorations. Several experiments were also carried out using similar systems by Xi et al. [
77] and Xu et al. [
78], and the results showed that this helicopter UAV magnetic system can provide a flexible and efficient means for large-scale and high-precision aeromagnetic surveys.
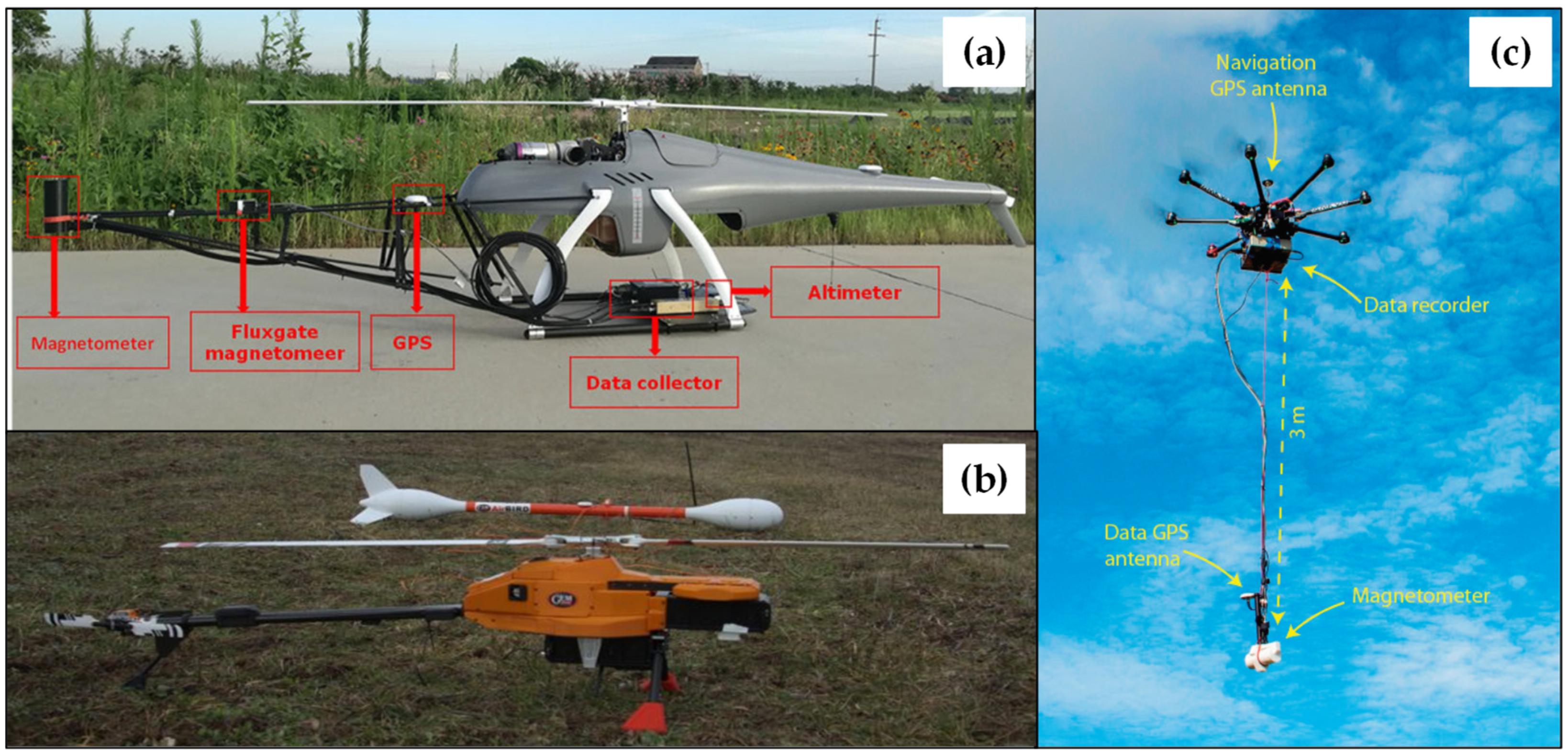
Jiang et al. [
79] integrated a helicopter UAV magnetic survey system which consisted of a helicopter, a high-precision potassium OPM, a fluxgate magnetometer, and a data recorder to obtain large-scale data with high efficiency in regions with complex conditions. The deviation, after compensation, is ±0.052 nT, which meets the high-resolution aeromagnetic survey specifications proposed by the Geological Survey of the Ministry of Natural Resources of China [
80]. Approximately 111.9 km-line magnetic data were collected in Ma ‘anshan crisis mine region, China. Three-dimensional magnetic inversion was applied, and the spatial distribution characteristics of the underground orebody was obtained, which demonstrated the potential of the developed UAV magnetic system in the exploration over the areas with complex terrain.
Table 2 summarizes the reviewed literature on helicopter UAV applications to magnetic surveys. Among the 11 papers examined, 4 applied a scalar total field magnetometer, 2 applied a vector magnetometer, 5 applied both scalar and vector magnetometers.
2.3. Multi-Rotor UAVs for Magnetic Surveys
In the past decade, a substantial body of research has accumulated on multi-rotor UAV magnetic surveys. Stoll [
74] introduced a small electric-powered UAV, which has a 1-h endurance with a 1 kg load in conducting rapid near-surface geophysical measurements. A lightweight data acquisition system was developed including a three-axis fluxgate magnetometer in combination with an inertial measuring unit (IMU). The effectiveness in finding ferrous objects (e.g., UXO, landslides) was demonstrated through two case studies.
MGT has developed several industry-specific solutions for mining and near-surface applications, i.e., the Single Mag System [
81] which is based on a six-rotor UAV equipped with a fluxgate magnetometer, and the Dual Mag System [
82] which is equipped with 2 fluxgate magnetometers. Both are ideal for many fields of applications, e.g., UXO detection, archeology, pipeline detection, allowing for cost-effective wide area scanning and dense data collecting.
Parvar et al. [
83] carried out magnetic surveys to determine the feasibility of UAV magnetometry for chromite detection; two surveys were conducted at altitudes of 20 m and 60 m with a line spacing of 30 m. The results revealed the location of the known chromite deposit and potentially another deposit in observations acquired at 20 m altitude, as shown in
Figure 4, however, localizing the deposit was difficult when the survey was performed at 60 m altitude. In addition, the feasibility of using a UAV magnetometry system for mineral exploration has been verified. Thus, it can be concluded that using a multi-rotor UAV could fill the gap between ground-based surveys and manned airborne magnetic surveys.
Macharet et al. [
84] proposed a novel magnetic survey pipeline that aims to increase versatility, speed, and robustness by using UAVs; a 3DR X8+ UAV was proposed equipped with a lightweight, low-power fluxgate magnetometer, and mission planning algorithm, which is based on the lawnmower coverage pattern was modified to subdivide the path into several small size segments. Through an extensive set of experiments performed to determine the mapping profile parameters and map generation methodology, several meaningful magnetic maps can be obtained.
Malehmir et al. [
85] have tested the potential of rotary-wing UAV systems, given their flight flexibility and robustness for direct targeting of iron-oxide deposits in central Sweden. An eight-rotor UAV was used for the experiment, a high precision Overhauser magnetometer equipped with a GPS antenna and data recorder was reassembled so that it could be lifted by the drone. Approximately 20 km-line total field magnetic data were collected covering an area of about 2 km
2 within 3 h. Historical low altitude fixed-wing aeromagnetic data from the study area are compared with the UAV data. Both data sets are consistent in delineating the mineralization, therefore demonstrating the potential of UAV-based surveys for mineral exploration in geologically and logistically challenging areas.
Cunningham et al. [
86] performed co-located ground magnetic and aeromagnetic surveys outside Nash Creek, Canada, over a known deposit. SkyLance, developed by Stratus Aeronautics, was used to perform high-resolution aeromagnetic surveys for mineral exploration; the payload consists of a fluxgate magnetometer used to record aircraft attitude and a cesium vapor magnetometer used to record aeromagnetic data. Magnetic data acquired at 80 m AGL captured three anomalies which had been previously identified on the ground magnetic data.
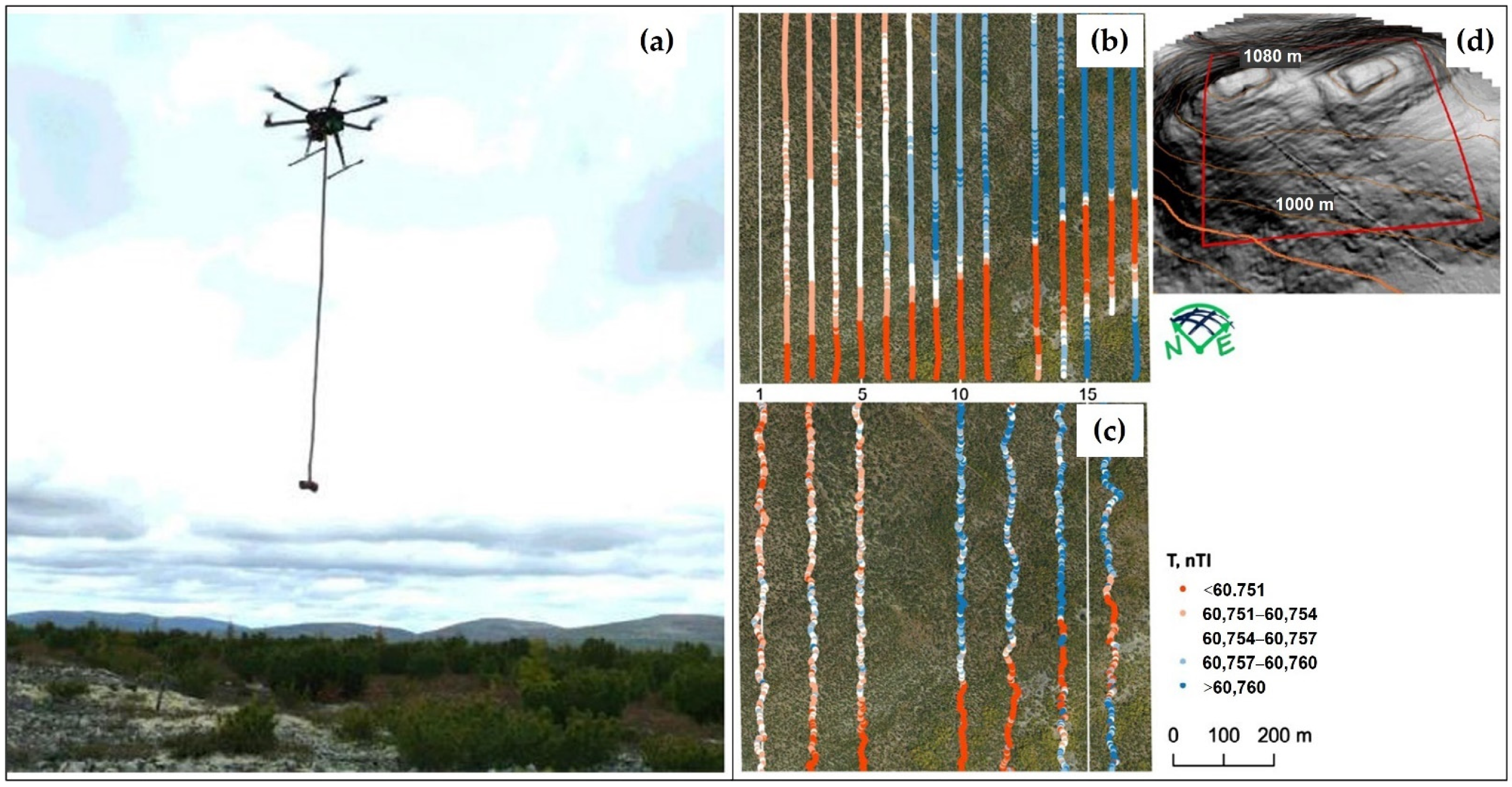
Parshin et al. [
87] have conducted several magnetic surveys in the mountainous regions of East Siberia since 2014, using the “Heavyweight” UAV which was initially designed for the replacement of traditional ground surveys in the scales of 1:10,000–1:1000 under complex natural and landscape conditions, as shown in
Figure 5. The flight missions were generated based on the digital elevation models. The results of the comparison between UAV and ground magnetic surveys for site N2 are presented (see
Figure 5b,c), and it can be clearly seen that the UAV magnetic survey obtained a more intensive data coverage than the ground survey. In addition, it is worth noting that the increased dispersion in ground survey data, which in this case is not indicative of greater detail of the survey but is because the ground survey operators have been forced to literally forge through dense thickets and wet bushes, which affects the accuracy of measurements.
Li et al. [
88] proposed an aeromagnetic survey method based on a six-rotor UAV and a fluxgate magnetometer to deal with the problem of large-scale surveys in areas difficult to reach by personnel; field tests were conducted in Heizhugou, Sichuan, China, over various units, e.g., gullies, canyons, and lakes. Results showed that UAV magnetic surveys contain more detailed magnetic field distribution information than traditional aeromagnetic surveys.
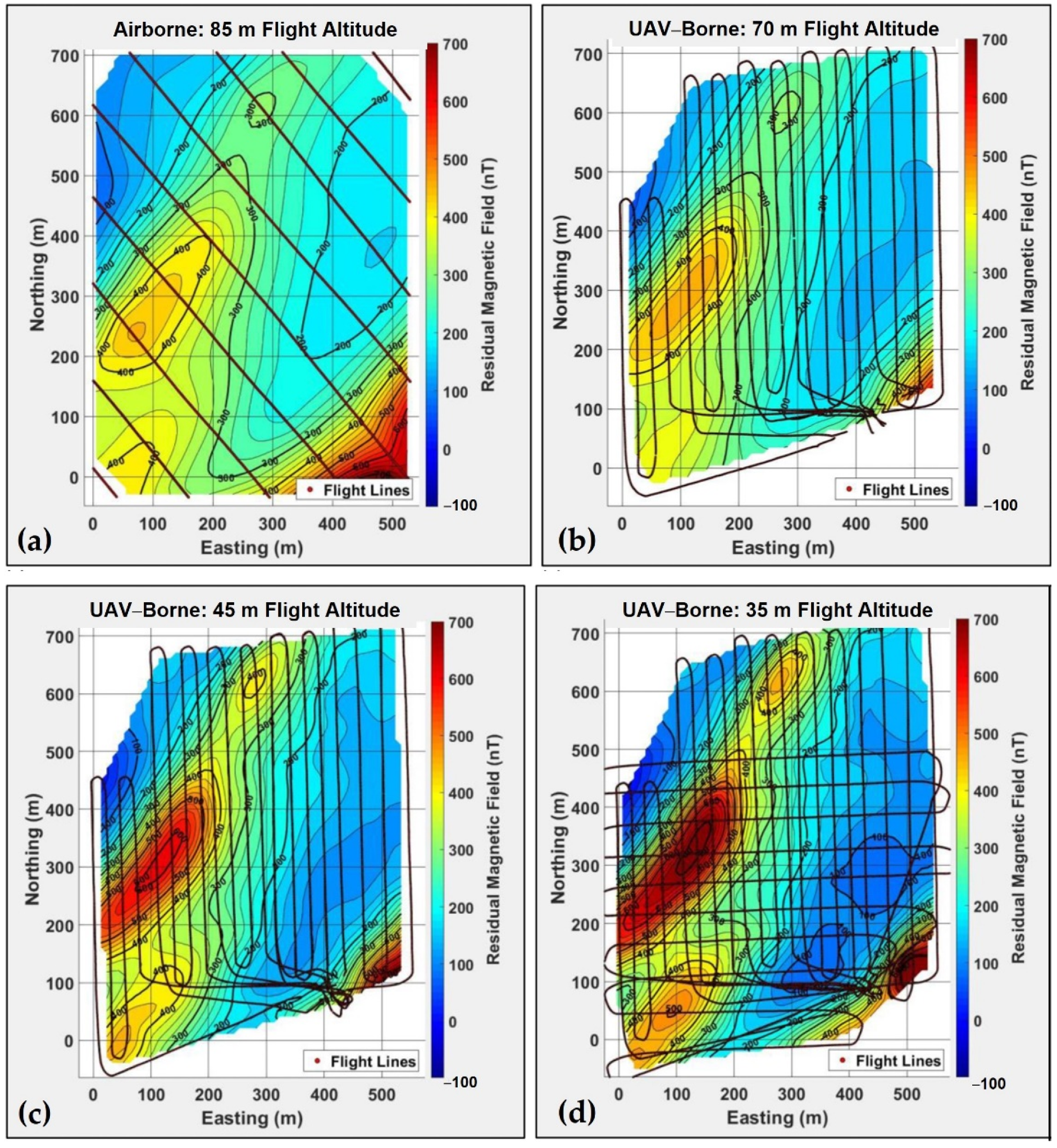
Walter et al. [
42] conducted a three-dimensional UAV magnetic survey in Ontario, Canada, using a DJI S900 and a potassium vapor magnetometer; over 48 km-line total field magnetic data were collected with a line spacing of 25 m. The collected data were compared to a regional heliborne aeromagnetic survey, as well as a follow-up terrestrial magnetic survey. Results showed that low flight elevation UAV magnetic surveys can reliably collect industry standard total magnetic field measurements at an increased resolution when compared to manned airborne magnetic surveys, as shown in
Figure 6. The enhanced interpretation potential further demonstrated the utility of applying UAV magnetic surveys to high-resolution mineral explorations.
Nikulin and de Smet [
89] present results of a proof-of-concept study focused on developing and testing a UAV-based magnetometer system to detect and identify abandoned and unmarked oil and gas wells in an area of historical hydrocarbon exploration and development in New York State. Aerial magnetic data were collected with the Geometrics microfabricated atomic magnetometer (MFAM) attached to a DJI Matrice 600 platform at altitudes of 10 m, 20 m, and 40 m, respectively. Results suggested that anomalies created by metallic well casings are nearly 400 nT at 40 m AGL, much greater than background geology and appeared as bull’s eye responses in interpolated magnetic maps, thus provide accurate location information to help plug orphaned and abandoned oil and gas wells.
Schmidt et al. [
41] used an eight-rotor UAV equipped with a cesium vapor magnetometer to conduct archaeological surveys of a Celtic burial site. A differential GPS antenna was integrated so that the UAV could follow a predefined route with centimeter-accuracy. The magnetometer combined with a GPS antenna, a compass, and an IMU were enclosed in a carbon fiber bird. The survey area was mapped with the bird at different altitudes of about 0.5 m, 1.3 m, and 2.2 m AGL, enabling deriving of gradient maps which usually show archaeological features most clearly. The results showed that UAV magnetic surveys for near-surface exploration can compete with ground surveys.
Mu et al. [
90] developed a novel UAV magnetic system for near-surface target detection which consisted of two magnetometers, radar altimeter, differential GPS, data recording, and power module. An eight-rotor UAV, DJI MG-1P, was used as the platform, two cesium OPMs were mounted on the center of the UAV by a vertical boom. The complete workflow was proposed, and field experiments were carried out in Hebei, China. Approximately 1.86 km-line total field magnetic data were collected with a line spacing of 0.5 m, five targets can be clearly identified from magnetic mapping results.
Luoma and Zhou [
91] integrated a UAV magnetic gradiometer that allows for geophysical exploration of magnetic subsurface features, e.g., geologic structures, metal detection, or locating UXO. The magnetic gradiometer was composed of two fluxgate magnetometers, two GPS receivers, and a microcontroller-based controlling and data-logging system. The components of the magnetic gradiometer system are light-weight and inexpensive, ideal for use with a UAV. Design improvements were made to the magnetic gradiometer to create a better instrument for magnetic remote sensing using the initial results.
Qiao et al. [
92] developed a UAV magnetic system based on a quadrotor platform, MAG-DN20G4, launched by Zhejiang Danian Technology Co., Ltd., and a fluxgate magnetometer to conduct large-scale mineral exploration. Field experiments were carried out in Liaoning, China, and the result was consistent with the ground magnetic data, which verified the effectiveness and practicability of the UAV magnetic system.
De Smit et al. [
93] carried out several field experiments to locate legacy oil and gas wells in Cattaraugus County, New York, as a follow-up study of the former research noted in [
89]; a gas-electric hybrid six-rotor UAV equipped with the Geometrics MFAM development kit sensors was used to overcome the limits of short endurance. The results demonstrated that hybrid UAV magnetic surveys were more operationally efficient than terrestrial or manned aeromagnetic surveys to detect and map orphaned and abandoned oil and gas wells, as well as many other fields.
Cunningham et al. [
94] performed a field experiment for gold exploration using The SkyLance 6200, an updated version of the original SkyLance, both developed by Stratus Aeronautics Inc. The main payload is a Geometrics G-823A cesium vapor magnetometer, which records scalar magnetic data at a frequency of 10 Hz. A total of 319.7 km-line total field magnetic data were collected with a line spacing of 50 m and a nominal altitude of 50 m AGL, the total magnetic intensity map revealed the structural framework of the banded iron formations present in the survey area, a realistic and detailed model of the subsurface can be yielded through unconstrained inversion.
Romero et al. [
95] described the accommodation of a UAV-vector magnetometry system with the function of terrain-following. Related work consists of the design, development and implementation of a solidary payload system anchored to the platform to determine the vector magnetic field. The details of the system were described, and the performance characteristics were obtained, the effectiveness of the system was demonstrated via a field campaign in the spatter deposits of Cerro Gordo volcano in Campos de Calatrava volcanic province in Spain.
Le Maire et al. [
96] tested the contributions of the magnetic measurements at different altitudes to the UAV results over an area of 1 km² in the Northern Vosges Mountains, France. Three magnetic surveys of the same area were obtained at different altitudes: 100, 30, and 1 m AGL, respectively. Magnetic data at different altitudes showed very different magnetic anomaly patterns, thus improving the understanding of the geology from local to more general scales.
Gailler et al. [
97] focused on UAV magnetic survey for volcanological applications, the QuSpin total field magnetometer (QTFM), which is particularly relevant for highly magnetized volcanic environments, being highly compact and sensitive, as well as easy and fast to deploy in the field was installed in a small size UAV, DJI Mavic 2, to carry out surveys. Several flight results were presented to discuss any artifacts of the UAV or environmental conditions in the magnetic surveys, as well as the comparison between simultaneous UAV and ground surveys. Results demonstrated that low altitude surveys are particularly relevant to well-imaged magnetic anomalies and their variation through time in a volcanic context.
Pisciotta et al. [
98] discussed the realization and functioning of a UAV-borne magnetometer prototype, tests for the validation of the experimental setup for some applications were reported. The UAV platform employed is a DJI Phantom 4 which provides power to the device at the same time; a lightweight fluxgate magnetometer was adopted as the sensing unit. The system was tested in Sicily, Italy, and results indicated that it is a reliable system capable of performing magnetic surveys for different applications.
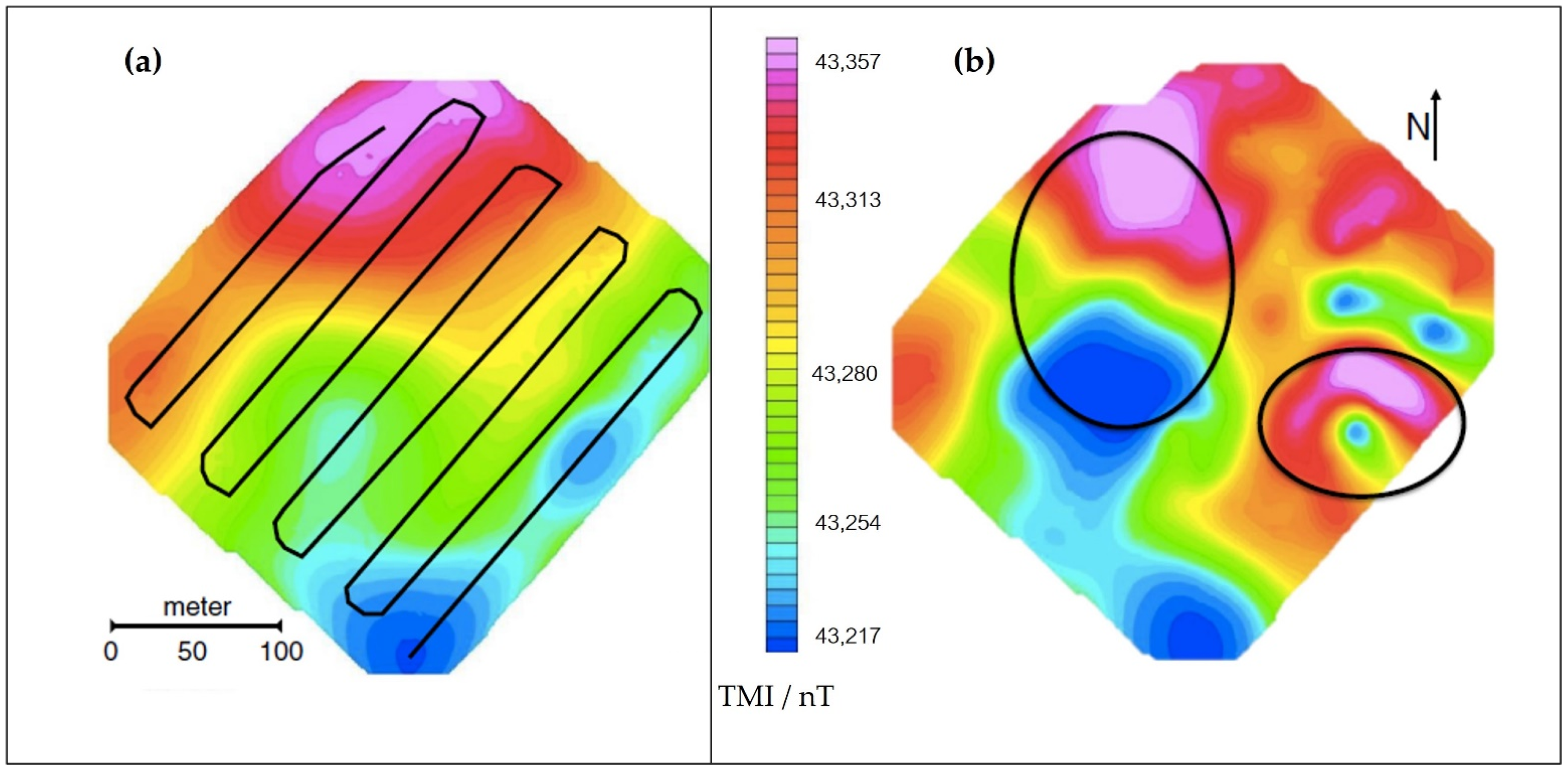
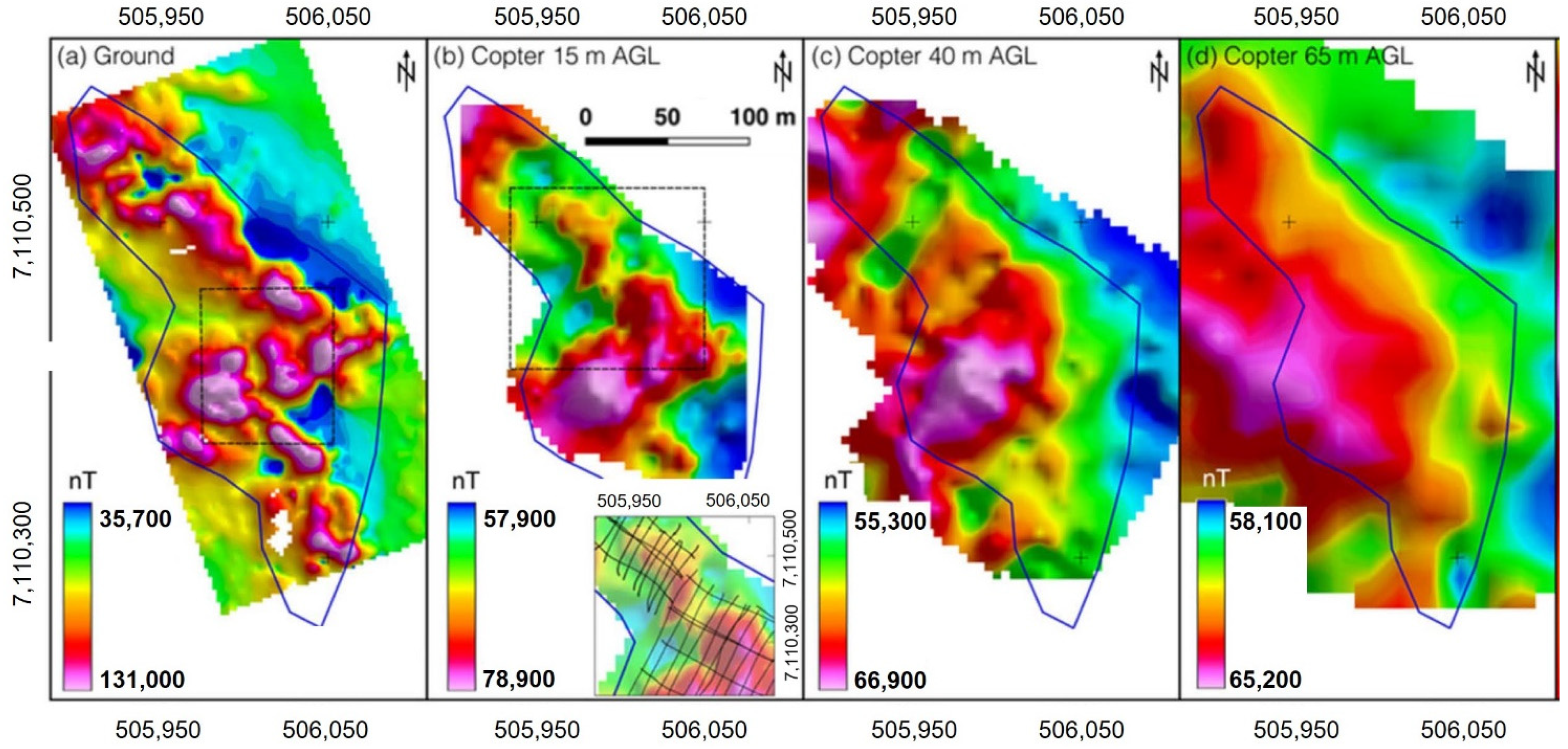
Jackisch et al. [
99] introduced an integrated acquisition and processing strategy for drone-borne multi-sensor surveys combining optical remote sensing and magnetic data. A calibrated fluxgate magnetometer was rigidly attached below the UAV center within 50 cm to the engines, with a range of ±75,000 nT and a sampling frequency of 200 Hz. Surveys at different flight altitudes were performed to investigate the following purposes: (1) To collect a magnetic dataset close to surface but within acceptable flight safety margins, for dense spatial coverage approaching the resolution of ground magnetics; and (2) to examine the regional behavior of the anomaly and to have a dataset that can serve as a reference for upward continuations of the other datasets. A systematic ground survey was performed to obtain a reference dataset for the UAV-based surveys. The magnetic measurements with different flight altitudes, as well as the ground surveys, are presented in
Figure 7. The 15 m flight captured similar locations of the anomalies as seen in the ground data, however, the actual shape of anomalies differs quite a bit from mapped ore lenses at the surface, due to the reduced resolution and the larger impact of deeper ore bodies with larger distance to the surface. With further increasing altitudes of the surveys at 40 and 65 m AGL, the more regional field with broader wavelengths and impact from deeper sources gradually becomes more dominant. In addition, the coarser line spacing of surveys made at 40 m and 60 m altitude further lowers the resolution and prohibits resolving the details observed in the ground based and 15 m altitude survey.
Yoo Lee-Sun et al. [
100] proposed a UAV-magnetometer system and a data-processing method for detecting metal antipersonnel landmines in the demilitarized zone in Korea. The eight-rotor UAV used a Pixhawk flight controller enabling accurate flight along a survey line, a fluxgate magnetometer was installed in a pendulum manner, hanging about 50 cm below the landing pole, which allows a reduced distance between the land surface and the magnetometer. Magnetic exploration was conducted in an actual mine-removal area, with nine magnetic anomalies of more than 5 nT detected and a variety of metallic substances found within a 1 m radius of each detection site. The proposed UAV-based landmine detection system is expected to reduce risk to detection personnel and shorten the landmine-detection period by providing accurate scientific information about the detection area prior to military landmine-detection efforts.
Shahsavani [
101] investigated the integration of the UAV with a magneto-inductive sensor which was suspended from the UAV by two ropes with a length of 3 m. A small iron ore deposit located in Kurdistan province on the west of Iran was selected as the survey area, aeromagnetic surveys were performed along with six profiles, each profile’s length was around 300 m, with a line spacing around 50 m. A terrestrial survey was also performed by a walking mode proton magnetometer along with the same profiles that the UAV flew to appraise the UAV magnetic survey results. Results showed the promising potential of using the UAV equipped with the magneto-inductive sensor to prospect the magnetic ore deposits.
Kim et al. [
102] presented their aeromagnetic survey results from an investigation of the iron ore mineral distribution in Pocheon, Korea. A manned aeromagnetic system using a helicopter for regional exploration and an unmanned aeromagnetic system using a multi-rotor for high-resolution exploration were used for the survey. The DJI M210 was selected as the platform, equipped with a scalar magnetometer which was hung 3 m below the UAV to reduce the interference. The flight altitude was set to 60 m for stable flight, with a line spacing of 50 m, an area of 25 km
2 data was collected within 8 h. The inversion results of the magnetic data confirmed the possibility of the existence of a new iron ore body. Based on inversion results, drilling was carried out and amphibolite including iron ore was revealed. The position and depth of the iron ore were consistent with the interpretation results of the magnetic data.
In addition to the systems mentioned in the above literature, many institutions have developed related systems based on state-of-the-art platforms. For example, ISS Aerospace developed a UAV equipped with an array of 7 magnetometers [
103] which was designed for UXO detection. However, more detailed information about this system cannot be found. The aeromagnetic system Geoscan 401 [
104], combining the benefits of industrial quadcopter and quantum magnetometer, allows operation at low altitude in flat terrain and complicated landscape conditions. A multi-elevation survey can be conducted by Geoscan 401, and this system is profitable and efficient if compared with manned aeromagnetic surveys.
Table 3 summarizes the reviewed literature and online websites on multi-rotor UAV applications for magnetic surveys. Among the 27 papers and online websites examined, 13 applied a scalar total field magnetometer, 10 applied a vector magnetometer, 2 applied two vector magnetometers, 1 applied two scalar magnetometers, 1 applied an array of seven magnetometers.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}