
Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South

 ,
,  , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
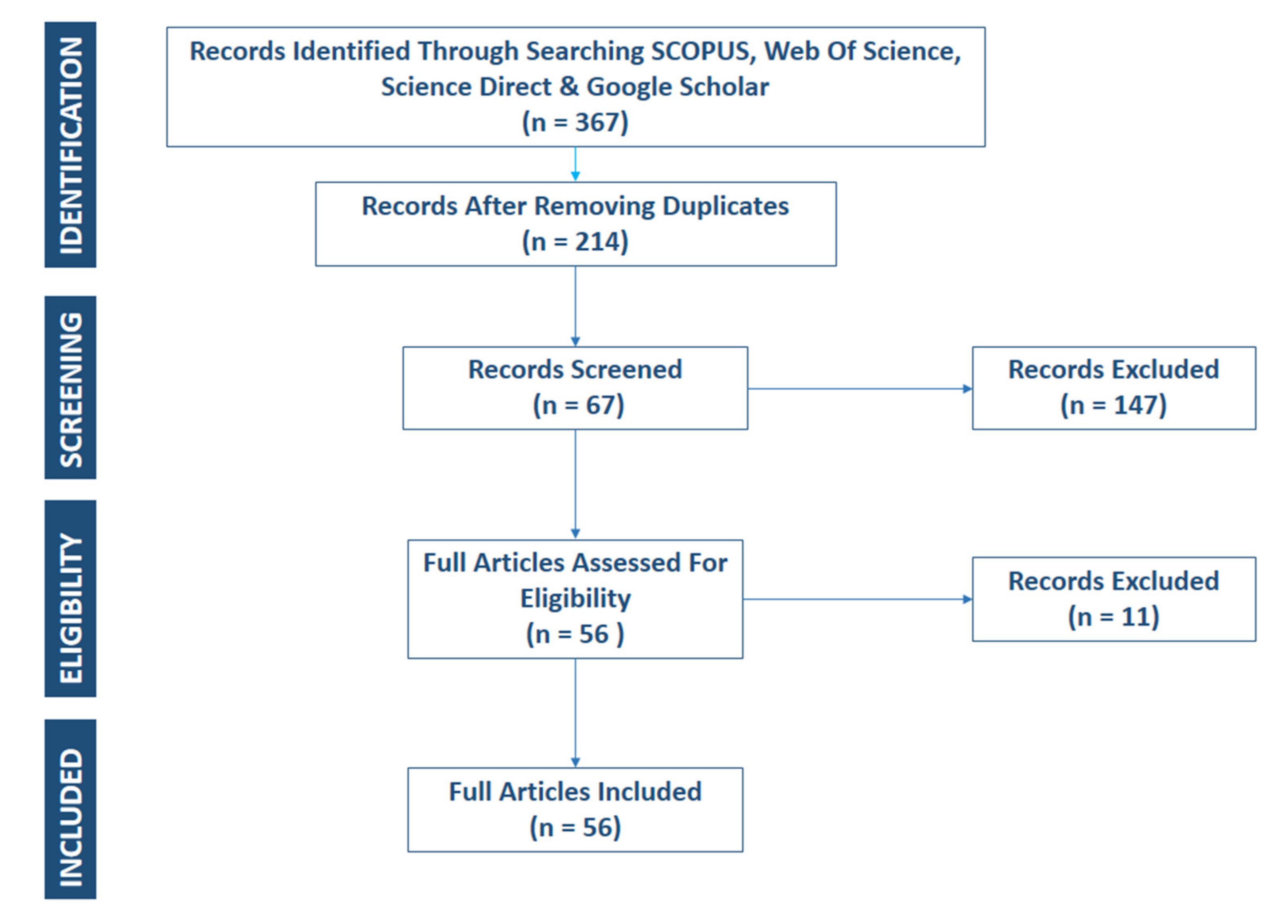
2.1. Phase 1: Literature Search
2.2. Phase 2: Data Extraction
2.3. Phase 3: Data Analysis
3. Results
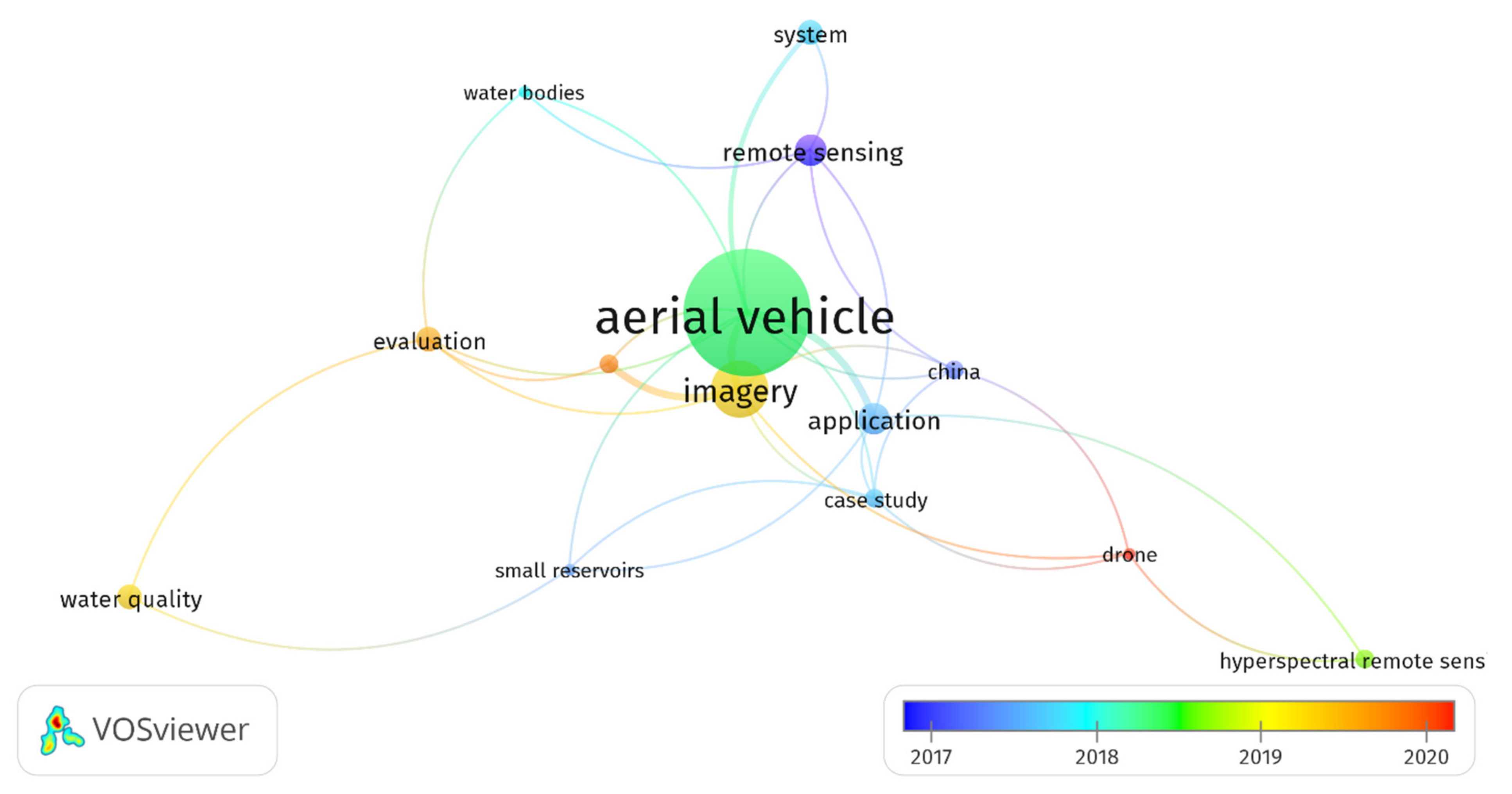
3.1. Searched Literature Characteristics
3.2. Progress in Modelling Water Quality and Quantity
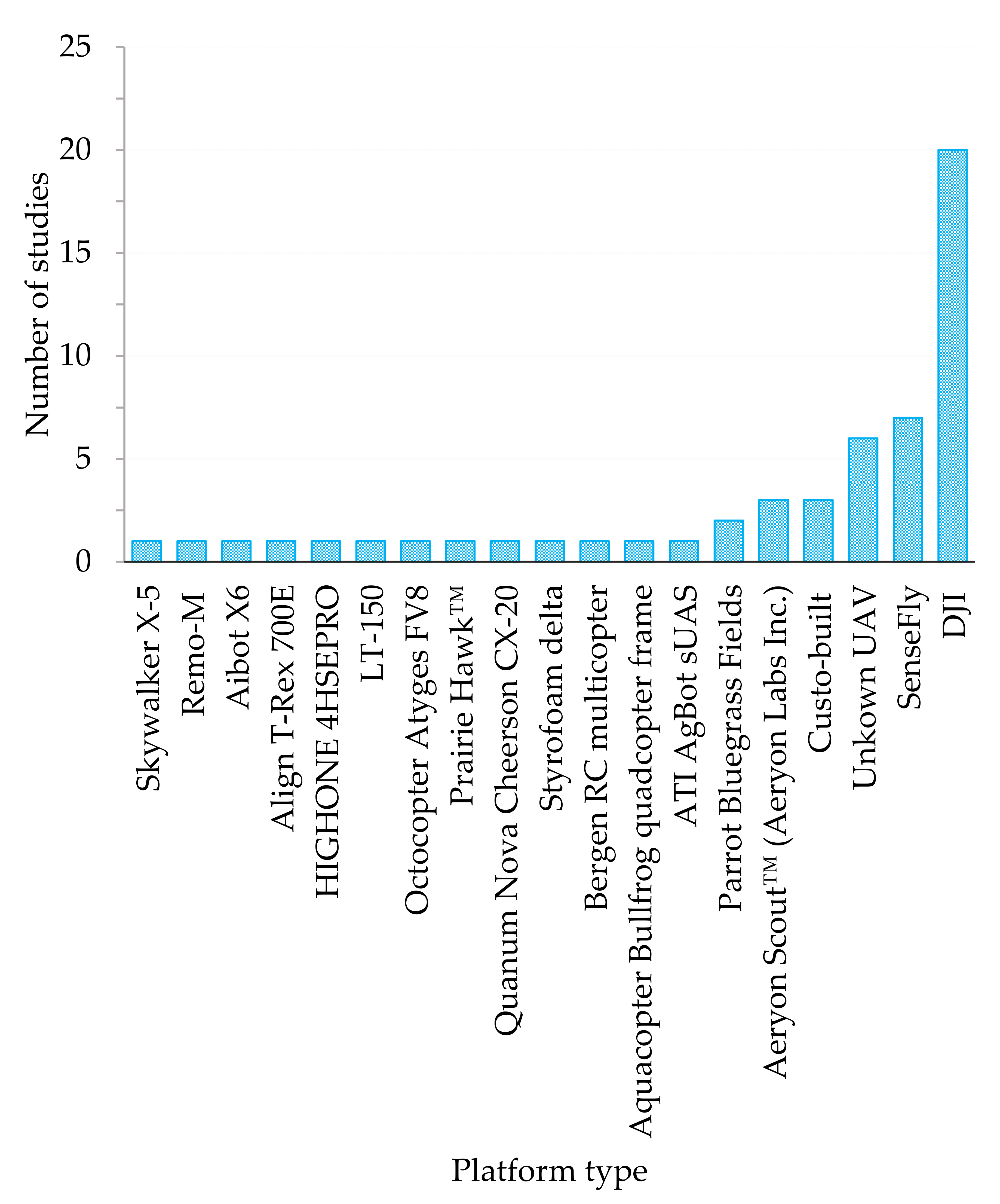
3.3. Types of Sensor Platforms
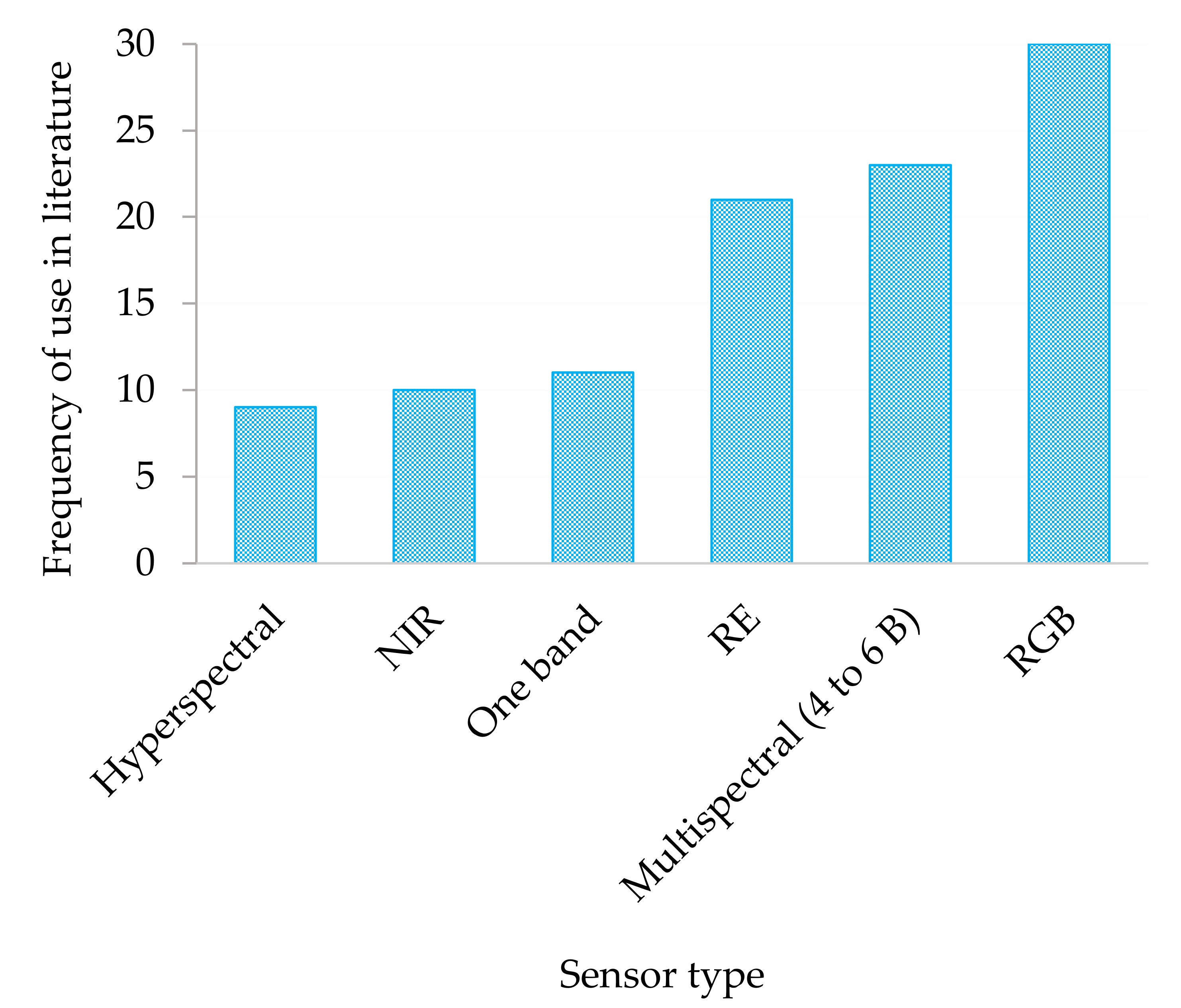
3.4. Sensors and Spectral Wavebands
3.5. The Role of Drone Data Derived Vegetation Indices and Machine Algorithms in Remote Sensing Water Quality and Quantity
4. Discussion
4.1. Evolution of Drone Technology Applications in Remote Sensing Water Quality and Quantity
4.2. Challenges in the Application of Drone Technologies with Special Reference to the Global South
“2.3 …the SACAA acknowledges that many entrepreneurs interested in obtaining a Remotely Piloted Aircraft Systems Operator Certificate (ROC) to provide aerial services, for example, real estate photography, academia etc. are not aviation professionals. As such, they have limited aviation backgrounds, and a lack knowledge about existing flight and airspace regulations. To protect the safety of the public and for these individuals to become viable UAS operators, they need to be aware of the requirements and the process. UAS operators, in turn, must be informed on the current regulations, policies and procedures to develop safe business practices in a similar fashion to professional “manned” aviation companies” (source: http://www.caa.co.za/RPAS%20AICs/AIC%20007-2015.pdf, accessed on 19 July 2021).
4.3. Research Gaps and Opportunities
- There are a limited number of studies that have sought to evaluate the utility of drone remotely sensed data in the global south;
- The assessment of water quality using multispectral and hyperspectral drone sensors has not attracted much attention from the research community;
- There are very few studies that have assessed the utility of robust nonparametric machine learning algorithms for water;
- Few studies have sought to evaluate and exploit the possible synergies between drone and satellite bone datasets, especially since the launch of Sentinel 2 MSI, which is freely available;
- Limited research attention has been given towards mapping water quality and quantity in open water reservoirs supplying smallholder farms;
- Furthermore, as noted in the literature (Lally et al., 2019; Koparan et al., 2018a), there is still a gap in the real-time use of drone-mounted monitoring probes in testing and monitoring water quality parameters.
4.4. Way Forward: Closing the Gaps in the Utilisation of Drone Technology in Mapping Water Quality and Quantity
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Stephens, G.L.; Slingo, J.M.; Rignot, E.; Reager, J.T.; Hakuba, M.Z.; Durack, P.J.; Worden, J.; Rocca, R. Earth’s water reservoirs in a changing climate. Proc. R. Soc. A 2020, 476, 20190458. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- FAO. World Food and Agriculture—Statistical Pocketbook; FAO: Rome, Italy, 2018. [Google Scholar]
- Finley, J.W.; Seiber, J.N. The nexus of food, energy, and water. J. Agric. Food Chem. 2014, 62, 6255–6262. [Google Scholar] [CrossRef]
- Fischer, G. World food and agriculture to 2030/50. In Technical Paper for the Expert Meeting on “How to Feed the World”; FAO: Rome, Italy, 2009; pp. 24–26. [Google Scholar]
- Bronkhorst, S.; Pengelly, C.; Seyler, H. Water 2017 Market Intelligence Report; Greencape: Cape Town, South Africa, 2017. [Google Scholar]
- Von Bormann, T.; Gulati, M. The Food Energy Water Nexus: Understanding South Africa’s Most Urgent Sustainability Challenge; WWF-SA: Western Cape, South Africa, 2014; pp. 1–35. [Google Scholar]
- Gholizadeh, M.H.; Melesse, A.M.; Reddi, L. A comprehensive review on water quality parameters estimation using remote sensing techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef] [Green Version]
- Palmer, K.F.; Williams, D. Optical properties of water in the near infrared. JOSA 1974, 64, 1107–1110. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Arnone, R.A. Deriving inherent optical properties from water color: A multiband quasi-analytical algorithm for optically deep waters. Appl. Opt. 2002, 41, 5755–5772. [Google Scholar] [CrossRef] [PubMed]
- Ovakoglou, G.; Alexandridis, T.K.; Crisman, T.L.; Skoulikaris, C.; Vergos, G.S. Use of MODIS satellite images for detailed lake morphometry: Application to basins with large water level fluctuations. Int. J. Appl. Earth Obs. Geoinf. 2016, 51, 37–46. [Google Scholar] [CrossRef]
- Dube, T.; Sibanda, M.; Shoko, C. Examining the variability of small-reservoir water levels in semi-arid environments for integrated water management purposes, using remote sensing. Trans. R. Soc. S. Afr. 2016, 71, 115–119. [Google Scholar] [CrossRef]
- Sallam, A.; Alharbi, A.B.; Usman, A.R.; Hussain, Q.; Ok, Y.S.; Alshayaa, M.; Al-Wabel, M. Environmental consequences of dam construction: A case study from Saudi Arabia. Arab. J. Geosci. 2018, 11, 1–12. [Google Scholar] [CrossRef]
- Ismail, M. Remote Sensing as a Tool in Assessing Water Quality. Life Sci. J. 2012, 9, 246–252. [Google Scholar]
- Campbell, G.; Phinn, S.R.; Dekker, A.G.; Brando, V.E. Remote sensing of water quality in an Australian tropical freshwater impoundment using matrix inversion and MERIS images. Remote Sens. Environ. 2011, 115, 2402–2414. [Google Scholar] [CrossRef] [Green Version]
- Xiang, T.-Z.; Xia, G.-S.; Zhang, L. Mini-Unmanned Aerial Vehicle-Based Remote Sensing: Techniques, applications, and prospects. IEEE Geosci. Remote Sens. Mag. 2019, 7, 29–63. [Google Scholar] [CrossRef] [Green Version]
- Lally, H.; O’Connor, I.; Jensen, O.; Graham, C. Can drones be used to conduct water sampling in aquatic environments? A review. Sci. Total Environ. 2019, 670, 569–575. [Google Scholar] [CrossRef] [PubMed]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Cancela, J.J.; González, X.P.; Vilanova, M.; Mirás-Avalos, J.M. Water management using drones and satellites in agriculture. Water 2019, 11, 874. [Google Scholar] [CrossRef] [Green Version]
- Small, H. Co-citation in the scientific literature: A new measure of the relationship between two documents. J. Am. Soc. Inf. Sci. 1973, 24, 265–269. [Google Scholar] [CrossRef]
- Lozano, S.; Calzada-Infante, L.; Adenso-Díaz, B.; García, S. Complex network analysis of keywords co-occurrence in the recent efficiency analysis literature. Scientometrics 2019, 120, 609–629. [Google Scholar] [CrossRef]
- Van Eck, N.J.; Waltman, L. Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef] [Green Version]
- Moher, D.; Shamseer, L.; Clarke, M.; Ghersi, D.; Liberati, A.; Petticrew, M.; Shekelle, P.; Stewart, L.A. Preferred reporting items for systematic review and meta-analysis protocols (PRISMA-P) 2015 statement. Syst. Rev. 2015, 4, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Shamseer, L.; Moher, D.; Clarke, M.; Ghersi, D.; Liberati, A.; Petticrew, M.; Shekelle, P.; Stewart, L.A. Preferred reporting items for systematic review and meta-analysis protocols (PRISMA-P) 2015: Elaboration and explanation. BMJ 2015, 349, g7647. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koparan, C.; Koc, A.; Privette, C.; Sawyer, C.; Sharp, J. Evaluation of a UAV-Assisted Autonomous Water Sampling. Water 2018, 10, 655. [Google Scholar] [CrossRef] [Green Version]
- Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B. In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System. Water 2018, 10, 264. [Google Scholar] [CrossRef] [Green Version]
- Cillero Castro, C.; Dominguez Gomez, J.A.; Delgado Martin, J.; Hinojo Sanchez, B.A.; Cereijo Arango, J.L.; Cheda Tuya, F.A.; Diaz-Varela, R. An UAV and Satellite Multispectral Data Approach to Monitor Water Quality in Small Reservoirs. Remote Sens. 2020, 12, 1514. [Google Scholar] [CrossRef]
- Zeng, C.; Richardson, M.; King, D.J. The impacts of environmental variables on water reflectance measured using a lightweight unmanned aerial vehicle (UAV)-based spectrometer system. ISPRS J. Photogramm. Remote Sens. 2017, 130, 217–230. [Google Scholar] [CrossRef]
- Larson, M.D.; Simic Milas, A.; Vincent, R.K.; Evans, J.E. Multi-depth suspended sediment estimation using high-resolution remote-sensing UAV in Maumee River, Ohio. Int. J. Remote Sens. 2018, 39, 5472–5489. [Google Scholar] [CrossRef]
- Ying, H.; Xia, K.; Huang, X.; Feng, H.; Yang, Y.; Du, X.; Huang, L. Evaluation of water quality based on UAV images and the IMP-MPP algorithm. Ecol. Inform. 2021, 61, 101239. [Google Scholar] [CrossRef]
- Kwon, Y.S.; Pyo, J.; Kwon, Y.-H.; Duan, H.; Cho, K.H.; Park, Y. Drone-based hyperspectral remote sensing of cyanobacteria using vertical cumulative pigment concentration in a deep reservoir. Remote Sens. Environ. 2020, 236, 416. [Google Scholar] [CrossRef]
- Kim, G.; Baek, I.; Stocker, M.D.; Smith, J.E.; Van Tassell, A.L.; Qin, J.; Chan, D.E.; Pachepsky, Y.; Kim, M.S. Hyperspectral Imaging from a Multipurpose Floating Platform to Estimate Chlorophyll-a Concentrations in Irrigation Pond Water. Remote Sens. 2020, 12, 2070. [Google Scholar] [CrossRef]
- Cheng, K.H.; Chan, S.N.; Lee, J.H.W. Remote sensing of coastal algal blooms using unmanned aerial vehicles (UAVs). Mar. Pollut. Bull. 2020, 152, 110889. [Google Scholar] [CrossRef]
- Guimarães, T.; Veronez, M.; Koste, E.; Gonzaga, L.; Bordin, F.; Inocencio, L.; Larocca, A.; de Oliveira, M.; Vitti, D.; Mauad, F. An Alternative Method of Spatial Autocorrelation for Chlorophyll Detection in Water Bodies Using Remote Sensing. Sustainability 2017, 9, 416. [Google Scholar] [CrossRef] [Green Version]
- Su, T.-C.; Chou, H.-T. Application of Multispectral Sensors Carried on Unmanned Aerial Vehicle (UAV) to Trophic State Mapping of Small Reservoirs: A Case Study of Tain-Pu Reservoir in Kinmen, Taiwan. Remote Sens. 2015, 7, 10078–10097. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wu, L.; Ren, H.; Liu, Y.; Zheng, Y.; Liu, Y.; Dong, J. Mapping Water Quality Parameters in Urban Rivers from Hyperspectral Images Using a New Self-Adapting Selection of Multiple Artificial Neural Networks. Remote Sens. 2020, 12, 336. [Google Scholar] [CrossRef] [Green Version]
- Vogt, M.C.; Vogt, M.E. Research Article: Near-Remote Sensing of Water Turbidity Using Small Unmanned Aircraft Systems. Environ. Pract. 2017, 18, 18–31. [Google Scholar] [CrossRef]
- Flynn, K.; Chapra, S. Remote Sensing of Submerged Aquatic Vegetation in a Shallow Non-Turbid River Using an Unmanned Aerial Vehicle. Remote Sens. 2014, 6, 12815–12836. [Google Scholar] [CrossRef] [Green Version]
- McEliece, R.; Hinz, S.; Guarini, J.-M.; Coston-Guarini, J. Evaluation of Nearshore and Offshore Water Quality Assessment Using UAV Multispectral Imagery. Remote Sens. 2020, 12, 2258. [Google Scholar] [CrossRef]
- Malakar, A.; Snow, D.D.; Ray, C. Irrigation Water Quality—A Contemporary Perspective. Water 2019, 11, 1482. [Google Scholar] [CrossRef] [Green Version]
- Frenkel, H. Reassessment of water quality criteria for irrigation. In Ecological Studies: Analysis and Synthesis; Springer-Verlag: New York, NY, USA, 1984. [Google Scholar]
- Bauder, T.A.; Waskom, R.; Sutherland, P.; Davis, J. Irrigation Water Quality Criteria; Colorado State University: Fort Collins, CO, USA, 2011. [Google Scholar]
- Jeong, H.; Kim, H.; Jang, T. Irrigation water quality standards for indirect wastewater reuse in agriculture: A contribution toward sustainable wastewater reuse in South Korea. Water 2016, 8, 169. [Google Scholar] [CrossRef] [Green Version]
- Sengupta, M.E.; Keraita, B.; Olsen, A.; Boateng, O.K.; Thamsborg, S.M.; Pálsdóttir, G.R.; Dalsgaard, A. Use of Moringa oleifera seed extracts to reduce helminth egg numbers and turbidity in irrigation water. Water Res. 2012, 46, 3646–3656. [Google Scholar] [CrossRef]
- Schumann, G.J.-P.; Muhlhausen, J.; Andreadis, K.M. Rapid Mapping of Small-Scale River-Floodplain Environments Using UAV SfM Supports Classical Theory. Remote Sens. 2019, 11, 982. [Google Scholar] [CrossRef] [Green Version]
- Brito, R.C.; Lorencena, M.C.; Loureiro, J.F.; Favarim, F.; Todt, E. A comparative approach on the use of unmanned aerial vehicles kind of fixed-wing and rotative wing applied to the precision agriculture scenario. In Proceedings of the 2019 IEEE 43rd Annual Computer Software and Applications Conference (COMPSAC), Milwaukee, WI, USA, 15–19 July 2019; pp. 522–526. [Google Scholar]
- Zaludin, Z.; Harituddin, A.S.M. Challenges and Trends of Changing from Hover to Forward Flight for a Converted Hybrid Fixed Wing VTOL UAS from Automatic Flight Control System Perspective. In Proceedings of the 2019 IEEE 9th International Conference on System Engineering and Technology (ICSET), Shah Alam, Malaysia, 7 October 2019; pp. 247–252. [Google Scholar]
- Tymków, P.; Jóźków, G.; Walicka, A.; Karpina, M.; Borkowski, A. Identification of Water Body Extent Based on Remote Sensing Data Collected with Unmanned Aerial Vehicle. Water 2019, 11, 338. [Google Scholar] [CrossRef] [Green Version]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Belluscio, A.; Ardizzone, G. Mapping and Classification of Ecologically Sensitive Marine Habitats Using Unmanned Aerial Vehicle (UAV) Imagery and Object-Based Image Analysis (OBIA). Remote Sens. 2018, 10, 1331. [Google Scholar] [CrossRef] [Green Version]
- Lou, H.; Wang, P.; Yang, S.; Hao, F.; Ren, X.; Wang, Y.; Shi, L.; Wang, J.; Gong, T. Combining and Comparing an Unmanned Aerial Vehicle and Multiple Remote Sensing Satellites to Calculate Long-Term River Discharge in an Ungauged Water Source Region on the Tibetan Plateau. Remote Sens. 2020, 12, 2155. [Google Scholar] [CrossRef]
- Olivetti, D.; Roig, H.; Martinez, J.-M.; Borges, H.; Ferreira, A.; Casari, R.; Salles, L.; Malta, E. Low-Cost Unmanned Aerial Multispectral Imagery for Siltation Monitoring in Reservoirs. Remote Sens. 2020, 12, 1855. [Google Scholar] [CrossRef]
- Kim, E.-J.; Nam, S.-H.; Koo, J.-W.; Hwang, T.-M. Hybrid Approach of Unmanned Aerial Vehicle and Unmanned Surface Vehicle for Assessment of Chlorophyll-a Imagery Using Spectral Indices in Stream, South Korea. Water 2021, 13, 1930. [Google Scholar] [CrossRef]
- Brinkhoff, J.; Hornbuckle, J.; Barton, J.L. Assessment of Aquatic Weed in Irrigation Channels Using UAV and Satellite Imagery. Water 2018, 10, 1497. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Hawthorne, T.L.; Torres, H.; Feinman, M. Using object-oriented classification for coastal management in the east central coast of Florida: A quantitative comparison between UAV, satellite, and aerial data. Drones 2019, 3, 60. [Google Scholar] [CrossRef] [Green Version]
- Freitas, P.; Vieira, G.; Canário, J.; Folhas, D.; Vincent, W.F. Identification of a threshold minimum area for reflectance retrieval from thermokarst lakes and ponds using full-pixel data from Sentinel-2. Remote Sens. 2019, 11, 657. [Google Scholar] [CrossRef] [Green Version]
- Wojcik, K.A.; Bialik, R.J.; Osinska, M.; Figielski, M. Investigation of Sediment-Rich Glacial Meltwater Plumes Using a High-Resolution Multispectral Sensor Mounted on an Unmanned Aerial Vehicle. Water 2019, 11, 2405. [Google Scholar] [CrossRef] [Green Version]
- Kim, W.; Jung, S.; Moon, Y.; Mangum, S.C. Morphological Band Registration of Multispectral Cameras for Water Quality Analysis with Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 2024. [Google Scholar] [CrossRef]
- Shang, S.; Lee, Z.; Lin, G.; Hu, C.; Shi, L.; Zhang, Y.; Li, X.; Wu, J.; Yan, J. Sensing an intense phytoplankton bloom in the western Taiwan Strait from radiometric measurements on a UAV. Remote Sens. Environ. 2017, 198, 85–94. [Google Scholar] [CrossRef]
- Mutanga, O.; Van Aardt, J.; Kumar, L. Imaging spectroscopy (hyperspectral remote sensing) in southern Africa: An overview. S. Afr. J. Sci. 2009, 105, 193–198. [Google Scholar] [CrossRef]
- Khan, M.J.; Khan, H.S.; Yousaf, A.; Khurshid, K.; Abbas, A. Modern trends in hyperspectral image analysis: A review. IEEE Access 2018, 6, 14118–14129. [Google Scholar] [CrossRef]
- Alawadi, F. Detection of surface algal blooms using the newly developed algorithm surface algal bloom index (SABI). In Remote Sensing of the Ocean, Sea Ice, and Large Water Regions 2010; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; p. 782506. [Google Scholar]
- Harrington, J.A., Jr.; Schiebe, F.R.; Nix, J.F. Remote sensing of Lake Chicot, Arkansas: Monitoring suspended sediments, turbidity, and Secchi depth with Landsat MSS data. Remote Sens. Environ. 1992, 39, 15–27. [Google Scholar] [CrossRef]
- Templin, T.; Popielarczyk, D.; Kosecki, R. Application of low-cost fixed-wing UAV for inland lakes shoreline investigation. Pure Appl. Geophys. 2018, 175, 3263–3283. [Google Scholar] [CrossRef] [Green Version]
- Ridolfi, E.; Manciola, P. Water Level Measurements from Drones: A Pilot Case Study at a Dam Site. Water 2018, 10, 297. [Google Scholar] [CrossRef] [Green Version]
- Adongo, T.A.; Kyei-Baffour, N.; Abagale, F.K.; Agyare, W.A. Assessment of reservoir sedimentation of irrigation dams in northern Ghana. Lake Reserv. Manag. 2020, 36, 87–105. [Google Scholar] [CrossRef]
- Tamminga, A.; Hugenholtz, C.; Eaton, B.; Lapointe, M. Hyperspatial remote sensing of channel reach morphology and hydraulic fish habitat using an unmanned aerial vehicle (uav): a first assessment in the context of river research and management. River Res. Appl. 2015, 31, 379–391. [Google Scholar] [CrossRef]
- Rahman, M.M.; McDermid, G.J.; Strack, M.; Lovitt, J. A New Method to Map Groundwater Table in Peatlands Using Unmanned Aerial Vehicles. Remote Sens. 2017, 9, 1057. [Google Scholar] [CrossRef] [Green Version]
- Lovitt, J.; Rahman, M.M.; Saraswati, S.; McDermid, G.J.; Strack, M.; Xu, B. UAV Remote Sensing Can Reveal the Effects of Low-Impact Seismic Lines on Surface Morphology, Hydrology, and Methane (CH4) Release in a Boreal Treed Bog. J. Geophys. Res. Biogeosciences 2018, 123, 1117–1129. [Google Scholar] [CrossRef] [Green Version]
- Flener, C.; Vaaja, M.; Jaakkola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppa, H.; Hyyppa, J.; Alho, P. Seamless Mapping of River Channels at High Resolution Using Mobile LiDAR and UAV-Photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef] [Green Version]
- Bandini, F.; Olesen, D.; Jakobsen, J.; Kittel, C.M.M.; Wang, S.; Garcia, M.; Bauer-Gottwein, P. Technical note: Bathymetry observations of inland water bodies using a tethered single-beam sonar controlled by an unmanned aerial vehicle. Hydrol. Earth Syst. Sci. 2018, 22, 4165–4181. [Google Scholar] [CrossRef] [Green Version]
- Gao, A.; Wu, S.; Wang, F.; Wu, X.; Xu, P.; Yu, L.; Zhu, S. A Newly Developed Unmanned Aerial Vehicle (UAV) Imagery Based Technology for Field Measurement of Water Level. Water 2019, 11, 124. [Google Scholar] [CrossRef] [Green Version]
- Feng, Q.; Liu, J.; Gong, J. Urban Flood Mapping Based on Unmanned Aerial Vehicle Remote Sensing and Random Forest Classifier—A Case of Yuyao, China. Water 2015, 7, 1437–1455. [Google Scholar] [CrossRef]
- Rossi, L.; Mammi, I.; Pelliccia, F. UAV-derived multispectral bathymetry. Remote Sens. 2020, 12, 3897. [Google Scholar] [CrossRef]
- Kageyama, Y.; Takahashi, J.; Nishida, M.; Kobori, B.; Nagamoto, D. Analysis of Water Quality in Miharu Dam Reservoir, Japan, using UAV Data. IEEJ Trans. Electr. Electron. Eng. 2016, 11, S183–S185. [Google Scholar] [CrossRef]
- Su, T.-C. A study of a matching pixel by pixel (MPP) algorithm to establish an empirical model of water quality mapping, as based on unmanned aerial vehicle (UAV) images. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 213–224. [Google Scholar] [CrossRef]
- Banerjee, B.P.; Raval, S.; Maslin, T.J.; Timms, W. Development of a UAV-mounted system for remotely collecting mine water samples. Int. J. Min. Reclam. Environ. 2018, 34, 385–396. [Google Scholar] [CrossRef]
- Guimarães, T.T.; Veronez, M.R.; Koste, E.C.; Souza, E.M.; Brum, D.; Gonzaga, L.; Mauad, F.F. Evaluation of Regression Analysis and Neural Networks to Predict Total Suspended Solids in Water Bodies from Unmanned Aerial Vehicle Images. Sustainability 2019, 11, 2580. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Yue, X.; Wang, H.; Ling, K.; Liu, Y.; Wang, J.; Hong, J.; Pen, W.; Song, H. Dynamic Inversion of Inland Aquaculture Water Quality Based on UAVs-WSN Spectral Analysis. Remote Sens. 2020, 12, 402. [Google Scholar] [CrossRef] [Green Version]
- Rhee, D.S.; Kim, Y.D.; Kang, B.; Kim, D. Applications of unmanned aerial vehicles in fluvial remote sensing: An overview of recent achievements. KSCE J. Civ. Eng. 2017, 22, 588–602. [Google Scholar] [CrossRef]
- Cracknell, A.P. UAVs: Regulations and law enforcement. Int. J. Remote Sens. 2017, 38, 3054–3067. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Search Platform | Search Criterion | Total Number of Articles | Number of Articles Retained |
|---|---|---|---|
| SCOPUS | (TITLE-ABS-KEY ((“unmanned aerial vehicle” OR “drone*” OR “Remote sensing*” OR “GIS” ) AND ( “crop water use” OR “irrigate*” OR “water productivity” OR “water use efficiency” ) AND ( “water bodies*” OR “dam*” OR “reservoir*” OR “River*” ) AND (“water quality” or “water quantity” or volume or “water volume” or “water reflectance”))) and not (TITLE-ABS-KEY(“groundwater” or “groundwater”)) AND ( LIMIT-TO ( DOCTYPE,”ar” ) ) | 136 | 70 |
| Web of Science | TS= ((“unmanned aerial vehicle” OR “drone*” OR “Remote sensing*” OR “GIS”) AND (“crop water use” OR “irrigate*” OR “water productivity” OR “water use efficiency”) AND (“water bodies*” OR “dam*” OR “reservoir*” OR “River*”) AND (“water quality” or “water quantity” or volume or “water volume” or “water reflectance”)) NOT (“groundwater” or “ground water”)) | 108 | 52 |
| Science Direct | ((“unmanned aerial vehicle” OR “drone” OR “Remote sensing” OR “GIS”) AND (“irrigation canal” OR “Dams) AND (“water quality” OR volume or “water reflectance”) NOT (“groundwater”)) | 73 | 32 |
| Google Scholar | ((“unmanned aerial vehicle” OR “drone” OR “Remote sensing” OR “GIS”) AND (“irrigation canal” OR “Dams) AND (“water quality” OR volume or “water reflectance”) | 63 | 60 |
| Articles considered before screening after removing duplicates | 214 | ||
| Articles on UAV applications in water | 56 |
| UAV_Platform | Platform Type | UAV_Sensor | No Bands | No RGB Bands | No RE Bands | No NIR Bands |
|---|---|---|---|---|---|---|
| custom-built multirotor | Quadcopter | |||||
| quadcopter-UAV | Quadcopter | |||||
| Aeryon Scout™ (Aeryon Labs Inc.) | Quadcopter | 3S™ | 1 | |||
| Aibot X6 | Quadcopter | NIKKOR AF-S 24–85 mm f/3.5–4.5G ED VR | 1 | |||
| Aibot X6 | Quadcopter | Velodyne HDL-32E | 1 | |||
| Styrofoam delta | Fixed-wing | Sony NEX-5N_APS-C CMOS | 1 | |||
| Aeryon SkyRanger | Quadcopter | Aeryon HDZoom31 | 3 | 3 | ||
| Aeryon SkyRanger | Quadcopter | HDZoom30 | 3 | 3 | ||
| Aibot X6 | Quadcopter | Nikon D800 | 3 | 3 | ||
| Align T-Rex 700E | Helicopter | Nikon D5100 | 3 | 3 | ||
| DJI hexacopter Spreading Wings S900 | Quadcopter | SONY RX-100, ARS 30X radar | 3 | 3 | ||
| DJI M 600 Pro | Quadcopter | K4 multi-spectrometer | 3 | 3 | 1 | |
| DJI MAVIC 2 | Quadcopter | HD integrated, L1D-20c model | 3 | 3 | ||
| DJI Phantom | Quadcopter | GoPro Hero 3 | 3 | 3 | ||
| DJI Phantom 3 | Quadcopter | Digital Camera | 3 | 3 | ||
| DJI Phantom 4 | Quadcopter | inBuilt | 3 | 3 | ||
| DJI Phantom 4 | Quadcopter | Sony IMX117 Exmor-R™, CMOS | 3 | 3 | ||
| DJI Phantom-4-pro | Quadcopter | 1”CMOS | 3 | 3 | ||
| DJI S 800 EVO Hexacopter | Quadcopter | Canon EOS 5DS R | 3 | 3 | ||
| Prairie Hawk™ | Fixed-wing | GoPro™ HERO3, | 3 | 3 | ||
| Prairie Hawk™ | Fixed-wing | Sony IMX117 Exmor-R™, CMOS | 3 | 3 | ||
| Quanum Nova Cheerson CX-20 | Quadcopter | GoPro Hero 4 Black Edition, Feiyu Mini 3D Pro | 3 | 3 | ||
| Quanum Nova Cheerson CX-21 | Quadcopter | GoPro Hero 4 Black Edition, Feiyu Mini 3D Pro | 3 | 3 | ||
| senseFly | Fixed-wing | Canon ELPH 110HS | 3 | 3 | ||
| SenseFly Swinglet CAM | Fixed wing | Canon ELPH 110HS | 3 | 3 | ||
| Skywalker X-5 | Quadcopter | Sony RX100 20 MP | 3 | 3 | ||
| ITALDRON HIGHONE 4HSEPRO | Quadcopter | SONY Alpha 7R, | 3 | |||
| senseFly eBee | Fixed-wing | MicaSense Parrot Sequoia | 4 | 2 | 1 | |
| senseFly eBee | Fixed wing | Canon Powershot S110 | 4 | 2 | 1 | |
| senseFly eBee | Fixed wing | Canon Powershot S110 | 4 | 2 | 1 | |
| DJI Phantom 3 Professional | Quadcopter | Sentera | 4 | 3 | ||
| DJI Phantom 3 Professional | Quadcopter | Sentera | 4 | 3 | ||
| DJI Phantom 4 | Quadcopter | Sequoia | 4 | 3 | 1 | 1 |
| Parrot Bluegrass Fields | Quadcopter | Sequoia | 4 | 3 | 1 | 1 |
| Remo-M | Fixed-wing | Sequoia | 4 | 3 | 1 | 1 |
| senseFly eBee | Fixed-wing | Sequoia | 4 | 3 | 1 | 1 |
| senseFly eBee | Fixed-wing | Sequoia | 4 | 3 | 1 | 1 |
| ATI AgBOT sUAS | Quadcopter | MicaSense RedEdge | 5 | 3 | 1 | |
| DJI Inspire 1 v2 | Quadcopter | MicaSense | 5 | 3 | 1 | |
| DJI Inspire-2 | Quadcopter | MicaSense RedEdge-M | 5 | 3 | 1 | 1 |
| DJI M600 multirotor | Quadcopter | MicaSense RedEdge multispectral | 5 | 3 | 1 | 1 |
| Octocopter ATyges FV8 | Octocopter | MicaSense RedEdge-M | 6 | 3 | 1 | 1 |
| DJI | Quadcopter | MAIA WV | 9 | 4 | 1 | |
| Aquacopter Bullfrog quadcopter frame | Quadcopter | Ocean Optics | >200 | 3 | 1 | |
| Bergen RC multi-copter | Quadcopter | Ocean Optics | >200 | 3 | 1 | |
| DJI M600 | Quadcopter | Gaia Sky-mini | >200 | 3 | 1 | |
| DJI Phantom 2 Vision Plus | Quadcopter | Ocean Optics STS-VIS | >200 | 3 | 1 | |
| LT-150 | Fixed wing | AvaSpec-dual | >200 | 3 | ||
| DJI Matrice 600 Pro | Quadcopter | Headwall Nano-Hyperspec | 270 | 3 | 1 | |
| DJI MATRICE M600 Pro | Quadcopter | Headwall Nano-Hyperspec | 270 | 3 | 1 | |
| DJI MATRICE M600 Pro | Quadcopter | Headwall Nano-Hyperspec | 270 | 3 | 1 | |
| DJI S 800 EVO Hexacopter | Quadcopter | Headwall Nano-Hyperspec | 270 | 3 | 1 |
| Spectrometer | Wavelength Range | Optical Resolution (nm) | Signal to Noise | Weight |
|---|---|---|---|---|
| Ocean Insight STS-VIS | 350–800 | 1.5, 12.0, 3.0, 6.0 | >1500 (at max signal) | 60 g |
| AvaSpec-dual | 360–1000 | 1 | ~100–400 (VIS) | 58 g |
| Gaia Sky-mini Hyperspectral | 400–1000 | 3.5nm | 1.5 kg | |
| NANO-HYPERSPEC | 400–1000 | 2.5 | 1.2/0.5 (lb/kg) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sibanda, M.; Mutanga, O.; Chimonyo, V.G.P.; Clulow, A.D.; Shoko, C.; Mazvimavi, D.; Dube, T.; Mabhaudhi, T. Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South. Drones 2021, 5, 84. https://doi.org/10.3390/drones5030084
Sibanda M, Mutanga O, Chimonyo VGP, Clulow AD, Shoko C, Mazvimavi D, Dube T, Mabhaudhi T. Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South. Drones. 2021; 5(3):84. https://doi.org/10.3390/drones5030084
Chicago/Turabian StyleSibanda, Mbulisi, Onisimo Mutanga, Vimbayi G. P. Chimonyo, Alistair D. Clulow, Cletah Shoko, Dominic Mazvimavi, Timothy Dube, and Tafadzwanashe Mabhaudhi. 2021. "Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South" Drones 5, no. 3: 84. https://doi.org/10.3390/drones5030084
APA StyleSibanda, M., Mutanga, O., Chimonyo, V. G. P., Clulow, A. D., Shoko, C., Mazvimavi, D., Dube, T., & Mabhaudhi, T. (2021). Application of Drone Technologies in Surface Water Resources Monitoring and Assessment: A Systematic Review of Progress, Challenges, and Opportunities in the Global South. Drones, 5(3), 84. https://doi.org/10.3390/drones5030084