
Appropriate Drone Flight Altitude for Horse Behavioral Observation

Abstract
1. Introduction
2. Materials and Methods
2.1. Drone and Camera
2.2. Horses, Paddock, and Pasture
2.3. Drone Operation
2.4. Direct and Drone Video Observations
2.5. Statistical Analysis
3. Results
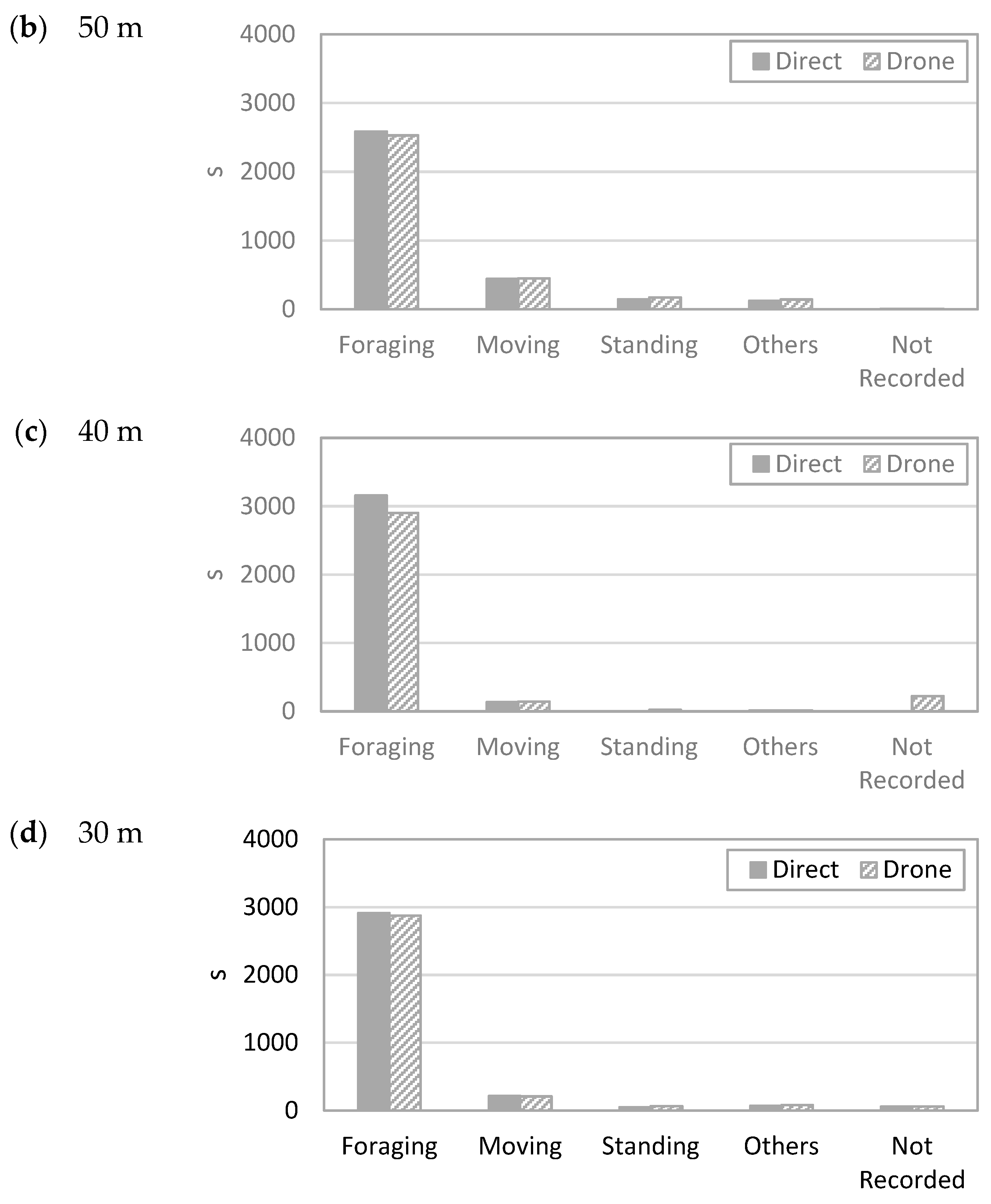
3.1. Recorded Behaviors
3.2. Behavior Details
4. Discussion
4.1. Impact of Drone Flight
4.2. Drone Position
4.3. Possibility of Behavioral Observations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hodgson, A.; Kelly, N.; Peel, D. Unmanned aerial vehicles (UAVs) for surveying marine fauna: A dugong case study. PLoS ONE 2013, 8, e79556. [Google Scholar] [CrossRef] [PubMed]
- Vermeulen, C.; Lejeune, P.; Lisein, J.; Sawadogo, P.; Bouché, P. Unmanned aerial survey of elephants. PLoS ONE 2013, 8, e54700. [Google Scholar] [CrossRef] [PubMed]
- Uehara, H.; Hashimoto, K.; Yoshida, R.; Yoshino, T.; Matsumoto, F.; Yoshida, T. A report on Red-crowned crane monitoring by unmanned aerial vehicle at Japanese crane reserve in Kushiro City. J. Rakuno Gakuen Univ. 2016, 41, 93–96. (In Japanese) [Google Scholar]
- Ratcliffe, N.; Guihen, D.; Robst, J.; Crofts, S.; Stanworth, A.; Enderlein, P. A protocol for the aerial survey of penguin colonies using UAVs. J. Unmanned Veh. Sys. 2015, 3, 95–101. [Google Scholar] [CrossRef]
- Pfeifer, C.; Rümmler, M.; Mustafa, O. Assessing colonies of Antarctic shags by unmanned aerial vehicle (UAV) at South Shetland Islands, Antarctica. Antarct. Sci. 2021, 33, 133–149. [Google Scholar] [CrossRef]
- Fudala, K.; Bialik, R.J. Breeding Colony Dynamics of Southern Elephant Seals at Patelnia Point, King George Island, Antarctica. Remote Sens. 2020, 12, 2964. [Google Scholar] [CrossRef]
- Shingu, Y.; Kondo, S.; Hata, H. Differences in grazing behavior of horses and cattle at the feeding station scale on woodland pasture. Anim. Sci. J. 2010, 81, 384–392. [Google Scholar] [CrossRef] [PubMed]
- Souris, A.; Kaczensky, P.; Julliard, R.; Walzer, C. Time budget-, behavioral synchrony- and body score development of a newly released Przewalski’s horse group Equus ferus przewalskii, in the Great Gobi B strictly protected area in SW Mongolia. Appl. Anim. Behav. Sci. 2007, 107, 307–321. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Rivera, E.; Benjamin, S.; Nielsen, B.; Shelle, J.; Zanella, A.J. Behavioral and physiological responses of horses to initial training: The comparison between pastured versus stalled horses. Appl. Anim. Behav. Sci. 2002, 78, 235–252. [Google Scholar] [CrossRef]
- Merkies, K.; Franzin, O. Enhanced Understanding of Horse-Human Interactions to Optimize Welfare. Animals 2021, 11, 1347. [Google Scholar] [CrossRef] [PubMed]
- Inoue, S.; Yamamoto, S.; Ringhofer, M.; Mendonça, R.S.; Pereira, C.; Hirata, S. Spatial positioning of individuals in a group of feral horses: A case study using drone technology. Mamm. Res. 2019, 64, 249–259. [Google Scholar] [CrossRef]
- Inoue, S.; Yamamoto, S.; Ringhofer, M.; Mendonça, R.S.; Hirata, S. Lateral position preference in grazing feral horses. Ethology 2020, 126, 111–119. [Google Scholar] [CrossRef]
- Ringhofer, M.; Go, C.K.; Inoue, S.; Mendonça, R.S.; Hirata, S.; Kubo, T.; Ikeda, K.; Yamamoto, S. Herding mechanisms to maintain the cohesion of a harem group: Two interaction phases during herding. J. Ethol. 2020, 38, 71–77. [Google Scholar] [CrossRef]
- McDonnell, S.; Torcivia, C. Preliminary Proof of the Concept of Wild (Feral) Horses Following Light Aircraft into a Trap. Animals 2020, 10, 80. [Google Scholar] [CrossRef] [PubMed]
- Rivas, A.; Chamoso, P.; González-Briones, A.; Corchado, J.M. Detection of cattle using drones and convolutional neural networks. Sensors 2018, 18, 2048. [Google Scholar] [CrossRef] [PubMed]
- Vayssade, J.A.; Arquet, R.; Bonneau, M. Automatic activity tracking of goats using drone camera. Comput. Electron. Agric. 2019, 162, 767–772. [Google Scholar] [CrossRef]
- Ministry of Land, Infrastructure, Transport and Tourism. Civil Aeronaut. Act. 2006.
- Ditmer, M.A.; Vincent, J.B.; Werden, L.K.; Tanner, J.C.; Laske, T.G.; Iaizzo, P.A.; Garshelis, D.L.; Fieberg, J.R. Bears show a physiological but limited behavioral response to unmanned aerial vehicles. Curr. Biol. 2015, 25, 2278–2283. [Google Scholar] [CrossRef] [PubMed]
- Martinson, K.L.; Siciliano, P.D.; Sheaffer, C.C.; McIntosh, B.J.; Swinker, A.M.; Williams, C.A. A review of equine grazing research methodologies. J. Equine Vet. Sci. 2017, 51, 92–104. [Google Scholar] [CrossRef]
- Sato, F.; Tanabe, T.; Murase, H.; Tominari, M.; Kawai, M. Application of a wearable GPS unit for examining interindividual distances in a herd of thoroughbred dams and their foals. J. Equine Sci. 2017, 28, 13–17. [Google Scholar] [CrossRef] [PubMed][Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiments in the paddock | |||||||
| Pair No. | I | II | III | ||||
| Horse | A | B | C | D | E | ||
| Breeds | Hokkaido native | Hokkaido native | Hokkaido native | Hokkaido native | Mixed pony | ||
| Age | 8 years | 5 months | 7 years | 6 months | 11 years | ||
| Flight start | 2017/9/21 10:29 | 2017/9/21 10:29 | 2017/10/21 11:57 | 2017/10/21 11:57 | 2017/9/24 10:27 | ||
| Experiments in the pasture | |||||||
| Pair No. | IV | V | VI | ||||
| Horse | F | G | H | I | J | K | |
| Breeds | Mixed | Mixed | Mixed | Thoroughbred | Mixed | Hokkaido native | |
| Age | 2 years | 8 years | 18 years | 23 years | 6 years | 23 years | |
| Flight start | 2017/9/5 13:55 | 2017/9/26 14:19 | 2017/9/13 13:55 | 2017/9/27 11:37 | 2017/9/22 14:46 | 2017/9/27 14:41 | |
| Behavior | Observation |
|---|---|
| Foraging | Muzzle lowered to the ground, grasping grass or hay with lips and tongue, chewing and swallowing grass. Moving less than three consecutive steps in 1 min while eating was not recorded as a movement. |
| Moving | Walking more than one step without eating. |
| Standing | Standing still without grazing, moving, or suckling. |
| Recumbency | Lying down on the ground |
| Avoidance | Horses seem to try to escape from the drone. |
| Others | Behaviors not described above (e.g., self/mutual grooming, defecation, |
| urination). |
| Altitude | Coefficient |
|---|---|
| 60 m | 0.60 *** |
| 50 m | 0.76 *** |
| 40 m | 0.47 *** |
| 30 m | 0.71 *** |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saitoh, T.; Kobayashi, M. Appropriate Drone Flight Altitude for Horse Behavioral Observation. Drones 2021, 5, 71. https://doi.org/10.3390/drones5030071
Saitoh T, Kobayashi M. Appropriate Drone Flight Altitude for Horse Behavioral Observation. Drones. 2021; 5(3):71. https://doi.org/10.3390/drones5030071
Chicago/Turabian StyleSaitoh, Tomoko, and Moyu Kobayashi. 2021. "Appropriate Drone Flight Altitude for Horse Behavioral Observation" Drones 5, no. 3: 71. https://doi.org/10.3390/drones5030071
APA StyleSaitoh, T., & Kobayashi, M. (2021). Appropriate Drone Flight Altitude for Horse Behavioral Observation. Drones, 5(3), 71. https://doi.org/10.3390/drones5030071