Multi-Sensor UAV Tracking of Individual Seedlings and Seedling Communities at Millimetre Accuracy


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Site
2.2. Flights and Image Capture
2.3. Image Analysis
2.4. Monitoring of Plant Response to Water Stress
2.5. Tracking of Specific Individuals
2.6. Statistics
3. Results
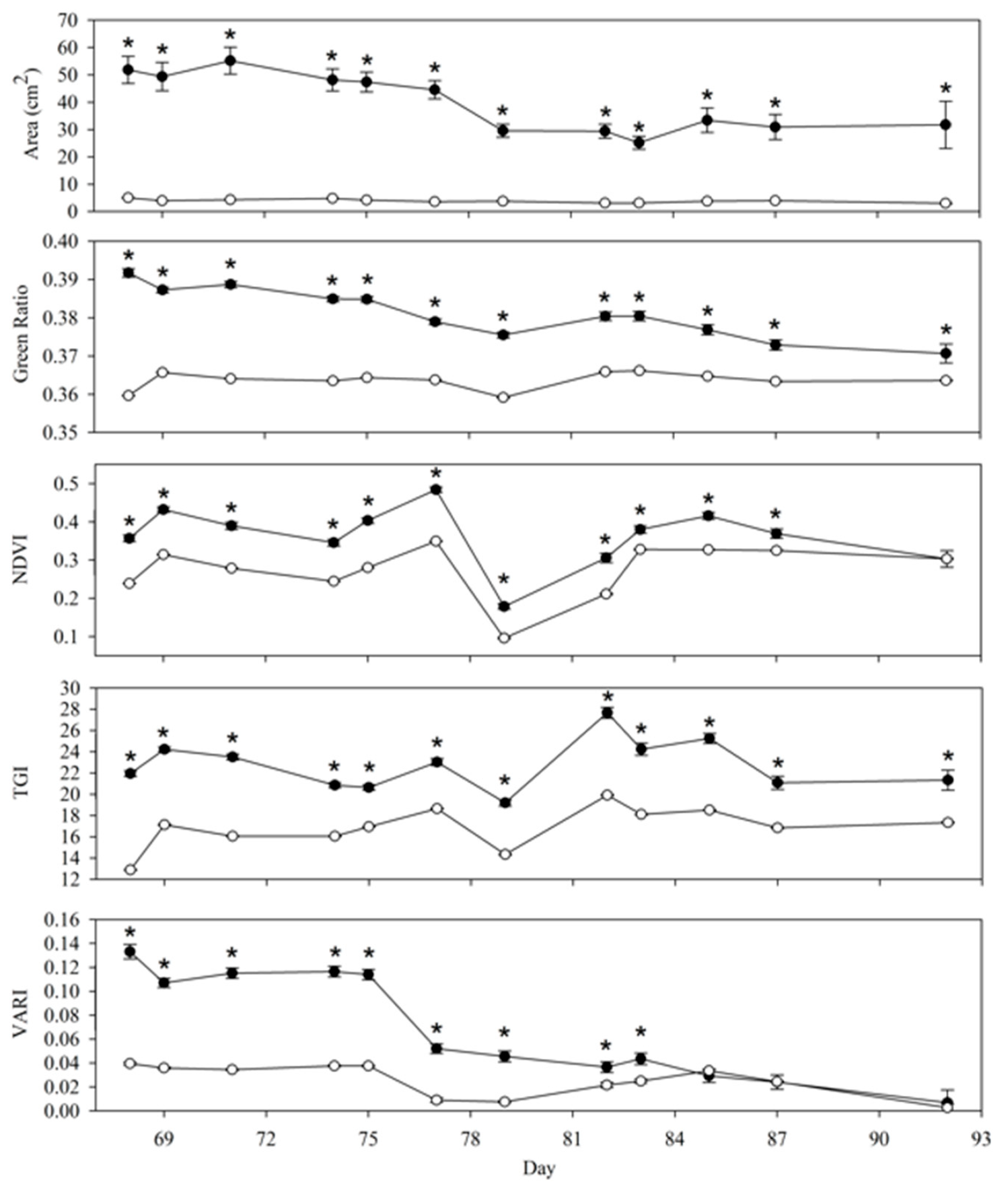
3.1. Response of Spectral Signature to Climatic Conditions
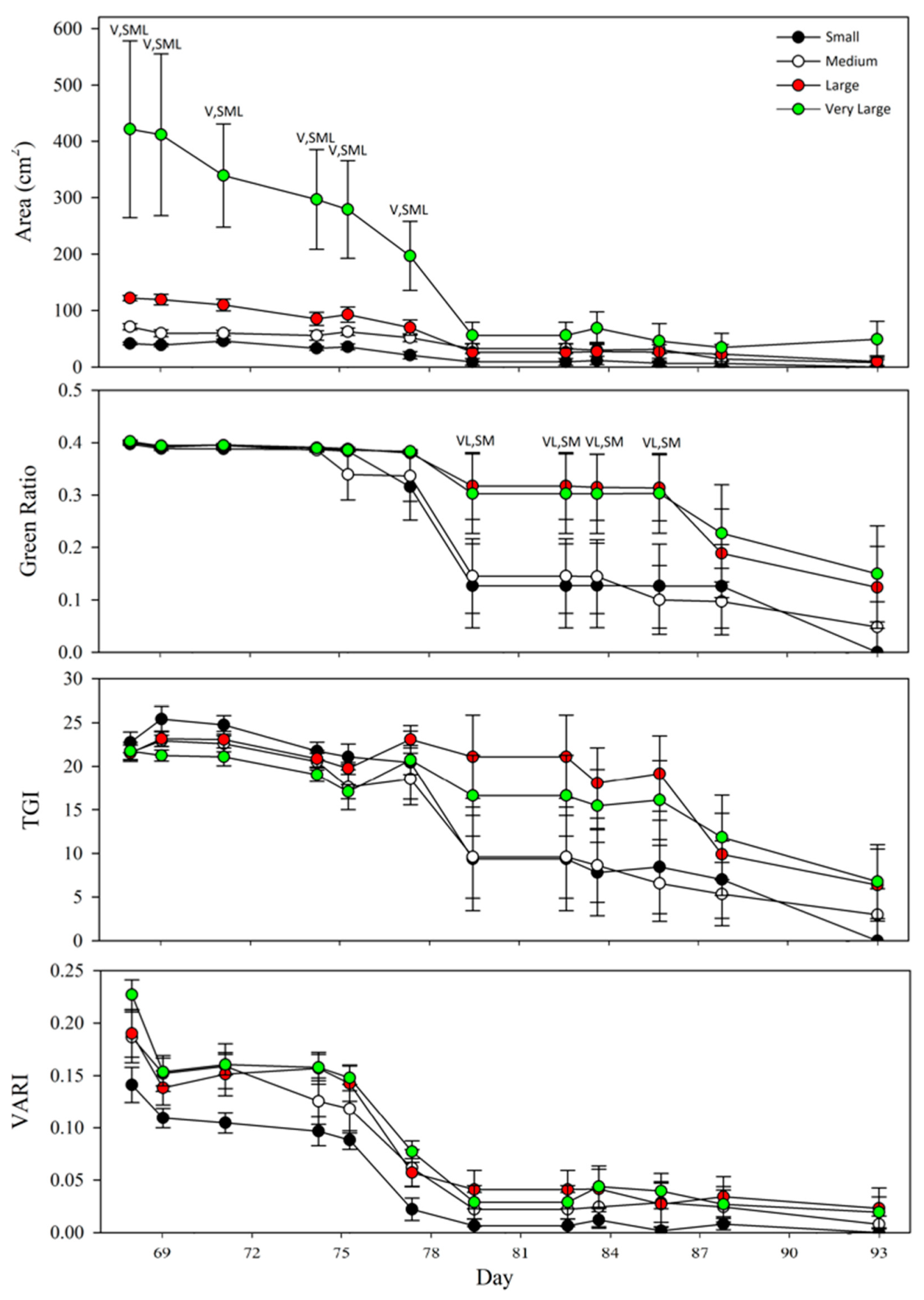
3.2. Plant Performance Monitoring for Target and Non-Target Seedling Communities
3.3. Monitoring Individual Target Seedling Objects through Time
4. Discussion
4.1. The Effect of Daily Climatic Conditions on Spectral Indices
4.2. Classification and Tracking of Seedling Communities
4.3. Classification and Tracking of Individual Seedlings
4.4. Sensor Misalignment
4.5. Avian Interactions with the UAV
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chazdon, R.L.; Brancalion, P.H.S.; Lamb, D.; Laestadius, L.; Calmon, M.; Kumar, C. A Policy-Driven Knowledge Agenda for Global Forest and Landscape Restoration. Conserv. Lett. 2017, 10, 125–132. [Google Scholar] [CrossRef]
- Hobbs, R.J. Setting Effective and Realistic Restoration Goals: Key Directions for Research. Restor. Ecol. 2007, 15, 354–357. [Google Scholar] [CrossRef]
- Li, M.S. Ecological restoration of mineland with particular reference to the metalliferous mine wasteland in China: A review of research and practice. Sci. Total Environ. 2006, 357, 38–53. [Google Scholar] [CrossRef] [PubMed]
- McDonald, T.; Jonson, J.; Dixon, K.W. National standards for the practice of ecological restoration in Australia. Restor. Ecol. 2016, 24, S4–S32. [Google Scholar] [CrossRef]
- Cross, A.T.; Nevill, P.G.; Dixon, K.W.; Aronson, J. Time for a paradigm shift toward a restorative culture. Restor. Ecol. 2019. [Google Scholar] [CrossRef]
- Cordell, S.; Questad, E.J.; Asner, G.P.; Kinney, K.M.; Thaxton, J.M.; Uowolo, A.; Brooks, S.; Chynoweth, M.W. Remote sensing for restoration planning: How the big picture can inform stakeholders. Restor. Ecol. 2017, 25, S147–S154. [Google Scholar] [CrossRef]
- Reis, B.P.; Martins, S.V.; Fernandes Filho, E.I.; Sarcinelli, T.S.; Gleriani, J.M.; Leite, H.G.; Halassy, M. Forest restoration monitoring through digital processing of high resolution images. Ecol. Eng. 2019, 127, 178–186. [Google Scholar] [CrossRef]
- Cooke, J.A.; Johnson, M.S. Ecological restoration of land with particular reference to the mining of metals and industrial minerals: A review of theory and practice. Environ. Rev. 2002, 10, 41–71. [Google Scholar] [CrossRef]
- González, E.; Rochefort, L.; Boudreau, S.; Poulin, M. Combining indicator species and key environmental and management factors to predict restoration success of degraded ecosystems. Ecol. Indic. 2014, 46, 156–166. [Google Scholar] [CrossRef]
- Herrick, J.E.; Schuman, G.E.; Rango, A. Monitoring ecological processes for restoration projects. J. Nat. Conserv. 2006, 14, 161–171. [Google Scholar] [CrossRef]
- Cross, S.C.; Bateman, P.W.; Cross, A.T. Restoration goals: Recovering a functioning ecosystem means considering fauna too. Ecol. Manag. Restor. 2019, in press. [Google Scholar]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Lehmann, J.R.K.; Prinz, T.; Ziller, S.R.; Thiele, J.; Heringer, G.; Meira-Neto, J.A.A.; Buttschardt, T.K. Open-Source Processing and Analysis of Aerial Imagery Acquired with a Low-Cost Unmanned Aerial System to Support Invasive Plant Management. Front. Environ. Sci. 2017, 5. [Google Scholar] [CrossRef]
- Buters, T.M.; Bateman, P.W.; Robinson, T.; Belton, D.; Dixon, K.W.; Cross, A.T. Methodological Ambiguity and Inconsistency Constrain Unmanned Aerial Vehicles as A Silver Bullet for Monitoring Ecological Restoration. Remote Sens. 2019, 11, 1180. [Google Scholar] [CrossRef]
- Cross, A.T.; Lambers, H. Young calcareous soil chronosequences as a model for ecological restoration on alkaline mine tailings. Sci. Total Environ. 2017, 607–608, 168–175. [Google Scholar] [CrossRef]
- Stevens, J.; Rokich, D.; Newton, V.; Barrett, R.; Dixon, K. Banksia Woodlands: A Restoration Guide for the Swan Coastal Plain; UWA Publishing: Perth, Australia, 2016. [Google Scholar]
- Ventura, D.; Bruno, M.; Jona Lasinio, G.; Belluscio, A.; Ardizzone, G. A low-cost drone based application for identifying and mapping of coastal fish nursery grounds. Estuar. Coast. Shelf Sci. 2016, 171, 85–98. [Google Scholar] [CrossRef]
- Colquhoun, I.J.; Hardy, G. Managing the Risks of Phytophthora Root and Collar Rot during Bauxite Mining in the Eucalyptus marginata (Jarrah) Forest of Western Australia. Plant Dis. 2000, 84, 116–127. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Baena, S.; Moat, J.; Whaley, O.; Boyd, D.S. Identifying species from the air: UAVs and the very high resolution challenge for plant conservation. PLoS ONE 2017, 12, e0188714. [Google Scholar] [CrossRef]
- Cruzan, M.B.; Weinstein, B.G.; Grasty, M.R.; Kohrn, B.F.; Hendrickson, E.C.; Arredondo, T.M.; Thompson, P.G. Small unmanned aerial vehicles (micro-UAVs, drones) in plant ecology. Appl. Plant Sci. 2016, 4. [Google Scholar] [CrossRef]
- Shahbazi, M.; Théau, J.; Ménard, P. Recent applications of unmanned aerial imagery in natural resource management. Gisci. Remote Sens. 2014, 51, 339–365. [Google Scholar] [CrossRef]
- Gann, G.D.; McDonald, T.; Walder, B.; Aronson, J.; Nelson, C.R.; Jonson, J.; Hallett, J.G.; Eisenberg, C.; Guariguata, M.R.; Liu, J.; et al. International principles and standards for the practice of ecological restoration. Second edition. Restor. Ecol. 2019, 27. [Google Scholar] [CrossRef]
- Cooke, S.J.; Suski, C.D. Ecological Restoration and Physiology: An Overdue Integration. BioScience 2008, 58, 957–968. [Google Scholar] [CrossRef]
- Ehleringer, J.R.; Sandquist, D.R.; Falk, D.A.; Palmer, M.; Zedler, J.B. Ecophysiological constraints on plant responses in a restoration setting. Found. Restor. Ecol. 2006, 42, 957–968. [Google Scholar]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Tripicchio, P.; Satler, M.; Dabisias, G.; Ruffaldi, E.; Avizzano, C.A. Towards Smart Farming and Sustainable Agriculture with Drones. In Proceedings of the 2015 International Conference on Intelligent Environments, Prague, Czech Republic, 15–17 July 2015; pp. 140–143. [Google Scholar]
- Zarco-Tejada, P.J.; Guillén-Climent, M.L.; Hernández-Clemente, R.; Catalina, A.; González, M.R.; Martín, P. Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric. For. Meteorol. 2013, 171–172, 281–294. [Google Scholar] [CrossRef]
- Zaman-Allah, M.; Vergara, O.; Araus, J.L.; Tarekegne, A.; Magorokosho, C.; Zarco-Tejada, P.J.; Hornero, A.; Alba, A.H.; Das, B.; Craufurd, P.; et al. Unmanned aerial platform-based multi-spectral imaging for field phenotyping of maize. Plant Methods 2015, 11, 35. [Google Scholar] [CrossRef]
- Yue, J.; Lei, T.; Li, C.; Zhu, J. The Application of Unmanned Aerial Vehicle Remote Sensing in Quickly Monitoring Crop Pests. Intell. Autom. Soft Comput. 2012, 18, 1043–1052. [Google Scholar] [CrossRef]
- Hunt, E.R.; Hively, W.D.; Fujikawa, S.; Linden, D.; Daughtry, C.S.; McCarty, G. Acquisition of NIR-Green-Blue Digital Photographs from Unmanned Aircraft for Crop Monitoring. Remote Sens. 2010, 2, 290–305. [Google Scholar] [CrossRef]
- Zhang, D.; Zhou, X.; Zhang, J.; Lan, Y.; Xu, C.; Liang, D. Detection of rice sheath blight using an unmanned aerial system with high-resolution color and multispectral imaging. PLoS ONE 2018, 13, e0187470. [Google Scholar] [CrossRef]
- Hoffmann, H.; Jensen, R.; Thomsen, A.; Nieto, H.; Rasmussen, J.; Friborg, T. Crop water stress maps for an entire growing season from visible and thermal UAV imagery. Biogeosciences 2016, 13, 6545–6563. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Sepulcre-Cantó, G.; Fereres, E.; Villalobos, F. Mapping canopy conductance and CWSI in olive orchards using high resolution thermal remote sensing imagery. Remote Sens. Environ. 2009, 113, 2380–2388. [Google Scholar] [CrossRef]
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, sensors, and data processing in agroforestry: A review towards practical applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Peñuelas, J.; Filella, I. Visible and near-infrared reflectance techniques for diagnosing plant physiological status. Trends Plant Sci. 1998, 3, 151–156. [Google Scholar] [CrossRef]
- Knoth, C.; Klein, B.; Prinz, T.; Kleinebecker, T. Unmanned aerial vehicles as innovative remote sensing platforms for high-resolution infrared imagery to support restoration monitoring in cut-over bogs. Appl. Veg. Sci. 2013, 16, 509–517. [Google Scholar] [CrossRef]
- Dash, J.P.; Watt, M.S.; Pearse, G.D.; Heaphy, M.; Dungey, H.S. Assessing very high resolution UAV imagery for monitoring forest health during a simulated disease outbreak. ISPRS J. Photogramm. Remote Sens. 2017, 131, 1–14. [Google Scholar] [CrossRef]
- Mahlein, A.K.; Rumpf, T.; Welke, P.; Dehne, H.W.; Plümer, L.; Steiner, U.; Oerke, E.C. Development of spectral indices for detecting and identifying plant diseases. Remote Sens. Environ. 2013, 128, 21–30. [Google Scholar] [CrossRef]
- Mahlein, A.-K.; Steiner, U.; Hillnhütter, C.; Dehne, H.-W.; Oerke, E.-C. Hyperspectral imaging for small-scale analysis of symptoms caused by different sugar beet diseases. Plant Methods 2012, 8, 3. [Google Scholar] [CrossRef]
- Bauriegel, E.; Herppich, W. Hyperspectral and Chlorophyll Fluorescence Imaging for Early Detection of Plant Diseases, with Special Reference to Fusarium spec. Infections on Wheat. Agriculture 2014, 4, 32–57. [Google Scholar] [CrossRef]
- Berni, J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring from an Unmanned Aerial Vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Gago, J.; Douthe, C.; Coopman, R.E.; Gallego, P.P.; Ribas-Carbo, M.; Flexas, J.; Escalona, J.; Medrano, H. UAVs challenge to assess water stress for sustainable agriculture. Agric. Water Manag. 2015, 153, 9–19. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J. Fluorescence, temperature and narrow-band indices acquired from a UAV platform for water stress detection using a micro-hyperspectral imager and a thermal camera. Remote Sens. Environ. 2012, 117, 322–337. [Google Scholar] [CrossRef]
- Chrétien, L.-P.; Théau, J.; Ménard, P. Visible and thermal infrared remote sensing for the detection of white-tailed deer using an unmanned aerial system. Wildl. Soc. Bull. 2016, 40, 181–191. [Google Scholar] [CrossRef]
- Gauthreaux, S.A.; Livingston, J.W. Monitoring bird migration with a fixed-beam radar and a thermal-imaging camera. J. Field Ornithol. 2006, 77, 319–328. [Google Scholar] [CrossRef]
- Verfuss, U.K.; Aniceto, A.S.; Harris, D.V.; Gillespie, D.; Fielding, S.; Jiménez, G.; Johnston, P.; Sinclair, R.R.; Sivertsen, A.; Solbø, S.A.; et al. A review of unmanned vehicles for the detection and monitoring of marine fauna. Mar. Pollut. Bull. 2019, 140, 17–29. [Google Scholar] [CrossRef]
- Whiteside, T.G.; Bartolo, R.E. A robust object-based woody cover extraction technique for monitoring mine site revegetation at scale in the monsoonal tropics using multispectral RPAS imagery from different sensors. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 300–312. [Google Scholar] [CrossRef]
- Long, R.L.; Gorecki, M.J.; Renton, M.; Scott, J.K.; Colville, L.; Goggin, D.E.; Commander, L.E.; Westcott, D.A.; Cherry, H.; Finch-Savage, W.E. The ecophysiology of seed persistence: A mechanistic view of the journey to germination or demise. Biol. Rev. Camb. Philos. Soc. 2015, 90, 31–59. [Google Scholar] [CrossRef]
- Buters, T.; Belton, D.; Cross, A. Seed and Seedling Detection Using Unmanned Aerial Vehicles and Automated Image Classification in the Monitoring of Ecological Recovery. Drones 2019, 3, 53. [Google Scholar] [CrossRef]
- Cross, A.T.; Stevens, J.C.; Sadler, R.; Moreira-Grez, B.; Ivanov, D.; Zhong, H.; Dixon, K.W.; Lambers, H. Compromised root development constrains the establishment potential of native plants in unamended alkaline post-mining substrates. Plant Soil 2018. [Google Scholar] [CrossRef]
- Cross, A.T.; Ivanov, D.; Stevens, J.C.; Sadler, R.; Zhong, H.; Lambers, H.; Dixon, K.W. Nitrogen limitation and calcifuge plant strategies constrain the establishment of native vegetation on magnetite mine tailings. Plant Soil 2019. [Google Scholar] [CrossRef]
- Turner, S.R.; Pearce, B.; Rokich, D.P.; Dunn, R.R.; Merritt, D.J.; Majer, J.D.; Dixon, K.W. Influence of Polymer Seed Coatings, Soil Raking, and Time of Sowing on Seedling Performance in Post-Mining Restoration. Restor. Ecol. 2006, 14, 267–277. [Google Scholar] [CrossRef]
- Trimble. eCognition User Guide; Trimble: Sunnyvale, CA, USA, 2019. [Google Scholar]
- McKinnon, T.; Hoff, P. Comparing RGB-based vegetation indices with NDVI for drone based agricultural sensing. AgribotixLlcAgbx021-17 2017, 1–8. [Google Scholar]
- Gitelson, A.A.; Stark, R.; Grits, U.; Rundquist, D.; Kaufman, Y.; Derry, D. Vegetation and soil lines in visible spectral space: A concept and technique for remote estimation of vegetation fraction. Int. J. Remote Sens. 2010, 23, 2537–2562. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.; Schell, J.; Deering, D. Monitoring Vegetation Systems in the Great Plains with ERTS. In Proceedings of the third Earth Resources Technology Satellite-1 Symposium, Washington, DC, USA, 10–14 December 1974; p. 309. [Google Scholar]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Liu, X. Analyses of the spring dust storm frequency of northern China in relation to antecedent and concurrent wind, precipitation, vegetation, and soil moisture conditions. J. Geophys. Res. 2004, 109. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; De Colstoun, E.B.; McMurtrey, J.E., III. Estimating Corn Leaf Chlorophyll Concentration from Leaf and Canopy Reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Sarker, A.M.; Rahman, M.S.; Paul, N.K. Effect of Soil Moisture on Relative Leaf Water Content, Chlorophyll, Proline and Sugar Accumulation in Wheat. J. Agron. Crop. Sci. 1999, 183, 225–229. [Google Scholar] [CrossRef]
- Schlemmer, M.R.; Francis, D.D.; Shanahan, J.F.; Schepers, J.S. Remotely Measuring Chlorophyll Content in Corn Leaves with Differing Nitrogen Levels and Relative Water Content. Agron. J. 2005, 97. [Google Scholar] [CrossRef]
- Pearcy, R.W.; Ehleringer, J.R.; Mooney, H.; Rundel, P.W. Plant Physiological Ecology: Field Methods and Instrumentation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Baluja, J.; Diago, M.P.; Balda, P.; Zorer, R.; Meggio, F.; Morales, F.; Tardaguila, J. Assessment of vineyard water status variability by thermal and multispectral imagery using an unmanned aerial vehicle (UAV). Irrig. Sci. 2012, 30, 511–522. [Google Scholar] [CrossRef]
- Bellvert, J.; Zarco-Tejada, P.J.; Girona, J.; Fereres, E. Mapping crop water stress index in a ‘Pinot-noir’ vineyard: Comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle. Precis. Agric. 2013, 15, 361–376. [Google Scholar] [CrossRef]
- Akiyama, T.; Kawamura, K. Grassland degradation in China: Methods of monitoring, management and restoration. Grassl. Sci. 2007, 53, 1–17. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Vautherin, J.; Rutishauser, S.; Schneider-Zapp, K.; Choi, H.F.; Chovancova, V.; Glass, A.; Strecha, C. Photogrammetric Accuracy and Modeling of Rolling Shutter Cameras. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-3, 139–146. [Google Scholar] [CrossRef]
- Zimmermann, F.; Eling, C.; Klingbeil, L.; Kuhlmann, H. Precise Positioning of UAVs—Dealing with Challenging RTK-GPS Measurement Conditions during Automated UAV Flights. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, IV-2/W3, 95–102. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Equation | Sensor Used | Rationale for Inclusion | Reference |
|---|---|---|---|---|
| Green ratio | Green/(Green + red + blue) | RGB | Used for initial target seedling identification | |
| TGI | Green − 0.39 × Red − 0.61 × Blue | RGB | Provides an estimate of chlorophyll content | [55] |
| VARI | (Green − Red)/(Green + Red − Blue) | RGB | Reduces atmospheric effects | [56] |
| NDVI | (NIR − Red)/(NIR + Red) | Multispectral | Most widely employed vegetation index in the literature | [57] |
| SAVI | ((1 + L)(NIR − Red))/(NIR + Red + L) | Multispectral | Variant of NDVI intended to be less influenced by soil induced variation | [58] |
| Factor | F (df, n) | P | Adj. R2 | Variables Statistically Significantly Adding to the Prediction (P < 0.05) |
|---|---|---|---|---|
| Object area | 42.302 (4, 109, 123) | <0.001 | 0.002 | Rainfall Solar exposure Maximum temperature Minimum temperature |
| NDVI | 5628.883 (4, 109, 099) | <0.001 | 0.17 | Rainfall Solar exposure Maximum temperature Minimum temperature |
| SAVI | 5643.055 (4, 109, 123) | <0.001 | 0.17 | Rainfall Solar exposure Maximum temperature Minimum temperature |
| TGI | 4770.678 (4, 109, 123) | <0.001 | 0.15 | Rainfall Solar exposure Maximum temperature Minimum temperature |
| VARI | 95.538 (4, 109, 123) | <0.001 | 0.003 | Rainfall Minimum temperature |
| Green Ratio | 1112.903 (4, 109, 123) | <0.001 | 0.04 | Rainfall Solar exposure Maximum temperature Minimum temperature |
| Factor | Variable | B | SEB | β |
|---|---|---|---|---|
| Object area | Intercept | 19.961 | 1.485 | |
| Rainfall * | 0.016 | 0.014 | 0.004 | |
| Solar Exposure * | −0.391 | 0.039 | 0.044 | |
| Minimum temperature * | −0.157 | 0.015 | −0.038 | |
| Maximum temperature * | −0.023 | 0.008 | −0.011 | |
| NDVI | Intercept | −1.776 | 0.016 | |
| Rainfall * | 0.002 | <0.001 | 0.037 | |
| Solar Exposure * | 0.058 | <0.001 | 0.542 | |
| Minimum temperature * | 0.006 | <0.001 | 0.129 | |
| Maximum temperature * | 0.006 | <0.001 | 0.232 | |
| SAVI | Intercept | −2.662 | 0.024 | |
| Rainfall * | 0.002 | <0.001 | 0.037 | |
| Solar Exposure * | 0.086 | 0.001 | 0.542 | |
| Minimum temperature * | 0.009 | <0.001 | 0.129 | |
| Maximum temperature * | 0.009 | <0.001 | 0.232 | |
| TGI | Intercept | 1.258 | 0.654 | |
| Rainfall * | 0.499 | 0.006 | 0.277 | |
| Solar Exposure * | −0.658 | 0.017 | −0.153 | |
| Minimum temperature * | −0.108 | 0.007 | −0.055 | |
| Maximum temperature * | −0.089 | 0.004 | −0.089 | |
| VARI | Intercept | −0.001 | 0.021 | |
| Rainfall * | 0.001 | <0.001 | 0.019 | |
| Solar Exposure | −0.001 | 0.001 | −0.006 | |
| Minimum temperature * | −0.003 | <0.001 | −0.047 | |
| Maximum temperature | 0 | <0.001 | −0.008 | |
| Green Ratio | Intercept | 0.353 | 0.001 | |
| Rainfall * | 0.001 | <0.001 | 0.149 | |
| Solar Exposure * | −0.001 | <0.001 | −0.061 | |
| Minimum temperature * | 0 | <0.001 | −0.052 | |
| Maximum temperature * | −0.001 | <0.001 | −0.011 |
| Index | F | P | Partial η2 | E |
|---|---|---|---|---|
| Area | 1054.134 (8.092, 108,141.318) | <0.001 | 0.073 | 0.736 |
| Green Ratio | 68.479 (2.161, 28,878.153) | <0.001 | 0.005 | 0.196 |
| NDVI | 167.570 (6.414, 85,717.123) | <0.001 | 0.012 | 0.583 |
| SAVI | 167.137 (6.420, 85,800.860) | <0.001 | 0.012 | 0.584 |
| TGI | 220.636 (4.965, 66,357.318) | <0.001 | 0.016 | 0.451 |
| VARI | 24.311 (6.135, 81,994.764) | <0.001 | 0.002 | 0.558 |
| Index | Object Area | Number of Individuals | ||
|---|---|---|---|---|
| Pearson Correlation | Significance | Pearson Correlation | Significance | |
| Green Ratio | 0.435 | <0.001 | 0.412 | <0.001 |
| NDVI | 0.408 | <0.001 | 0.120 | <0.001 |
| SAVI | 0.408 | <0.001 | 0.120 | <0.001 |
| TGI | −0.046 | 0.12 | −0.098 | 0.001 |
| VARI | 0.470 | <0.001 | 0.517 | <0.001 |
| Individual | Area at Day 68 | X-Displacement (mm) | Y-Displacement (mm) |
|---|---|---|---|
| 1 | 170 | 15 ± 3.3 (4–37) | 19 ± 5.1 (2–45) |
| 2 | 551 | 3 ± 2.1 (0–9) | 14 ± 5.6 (0–25) |
| 3 | 144 | 0 ± 0 (0–0) | 0 ± 0 (0–0) |
| 4 | 135 | 12 ± 6.2 (0–28) | 15 ± 7.6 (1–40) |
| 5 | 109 | 4 ± 1.1 (0–10) | 3 ± 1.0 (0–10) |
| 6 | 43 | 12 ± 4.5 (0–23) | 30 ± 8.2 (9–57) |
| 7 | 186 | 11 ± 3.5 (2–21) | 16 ± 7.8 (0–46) |
| 8 | 63 | 8 ± 2.1 (2–21) | 10 ± 3.5 (1–34) |
| 9 | 218 | 8 ± 5.6 (2–13) | 19 ± 14.4 (4–33) |
| 10 | 79 | 7 ± 1.8 (3–19) | 13 ± 3.0 (2–26) |
| 11 | 125 | 9 ± 4.2 (1–23) | 28 ± 5.7 (16–50) |
| 12 | 982 | 15 ± 11.2 (0–47) | 18 ± 12.1 (0–51) |
| 13 | 73 | 10 ± 2.8 (3–18) | 12 ± 3.0 (1–18) |
| 14 | 92 | 7 ± 1.9 (2–10) | 20 ± 4.8 (10–37) |
| 15 | 127 | 34 ± 6.5 (22–44) | 17 ± 4.6 (9–25) |
| 16 | 42 | 14 ± 3.4 (2–30) | 11 ± 3.7 (1–34) |
| 17 | 70 | 12 ± 5.9 (1–50) | 9 ± 2.3 (3–20) |
| 18 | 107 | 11 ± 2.7 (0–25) | 17 ± 4.9 (1–45) |
| 19 | 49 | 8 ± 2.7 (3–17) | 28 ± 6.3 (6–44) |
| 20 | 119 | 4 ± 1.4 (0–7) | 10 ± 2.5 (3–15) |
| 21 | 111 | 3 ± 1.3 (0–6) | 5 ± 2.9 (0–17) |
| 22 | 36 | 8 ± 8.0 (0–32) | 12 ± 11.0 (0–45) |
| 23 | 33 | 5 ± 2.7 (0–15) | 8 ± 3.0 (1–18) |
| 24 | 46 | 10 ± 2.8 (0–26) | 15 ± 2.9 (4–28) |
| 25 | 52 | 23 ± 9.3 (0–66) | 10 ± 2.7 (2–25) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buters, T.M.; Belton, D.; Cross, A.T. Multi-Sensor UAV Tracking of Individual Seedlings and Seedling Communities at Millimetre Accuracy. Drones 2019, 3, 81. https://doi.org/10.3390/drones3040081
Buters TM, Belton D, Cross AT. Multi-Sensor UAV Tracking of Individual Seedlings and Seedling Communities at Millimetre Accuracy. Drones. 2019; 3(4):81. https://doi.org/10.3390/drones3040081
Chicago/Turabian StyleButers, Todd M., David Belton, and Adam T. Cross. 2019. "Multi-Sensor UAV Tracking of Individual Seedlings and Seedling Communities at Millimetre Accuracy" Drones 3, no. 4: 81. https://doi.org/10.3390/drones3040081
APA StyleButers, T. M., Belton, D., & Cross, A. T. (2019). Multi-Sensor UAV Tracking of Individual Seedlings and Seedling Communities at Millimetre Accuracy. Drones, 3(4), 81. https://doi.org/10.3390/drones3040081