UAV-Derived Himalayan Topography: Hazard Assessments and Comparison with Global DEM Products


Abstract
1. Introduction
2. Study Sites and Methods
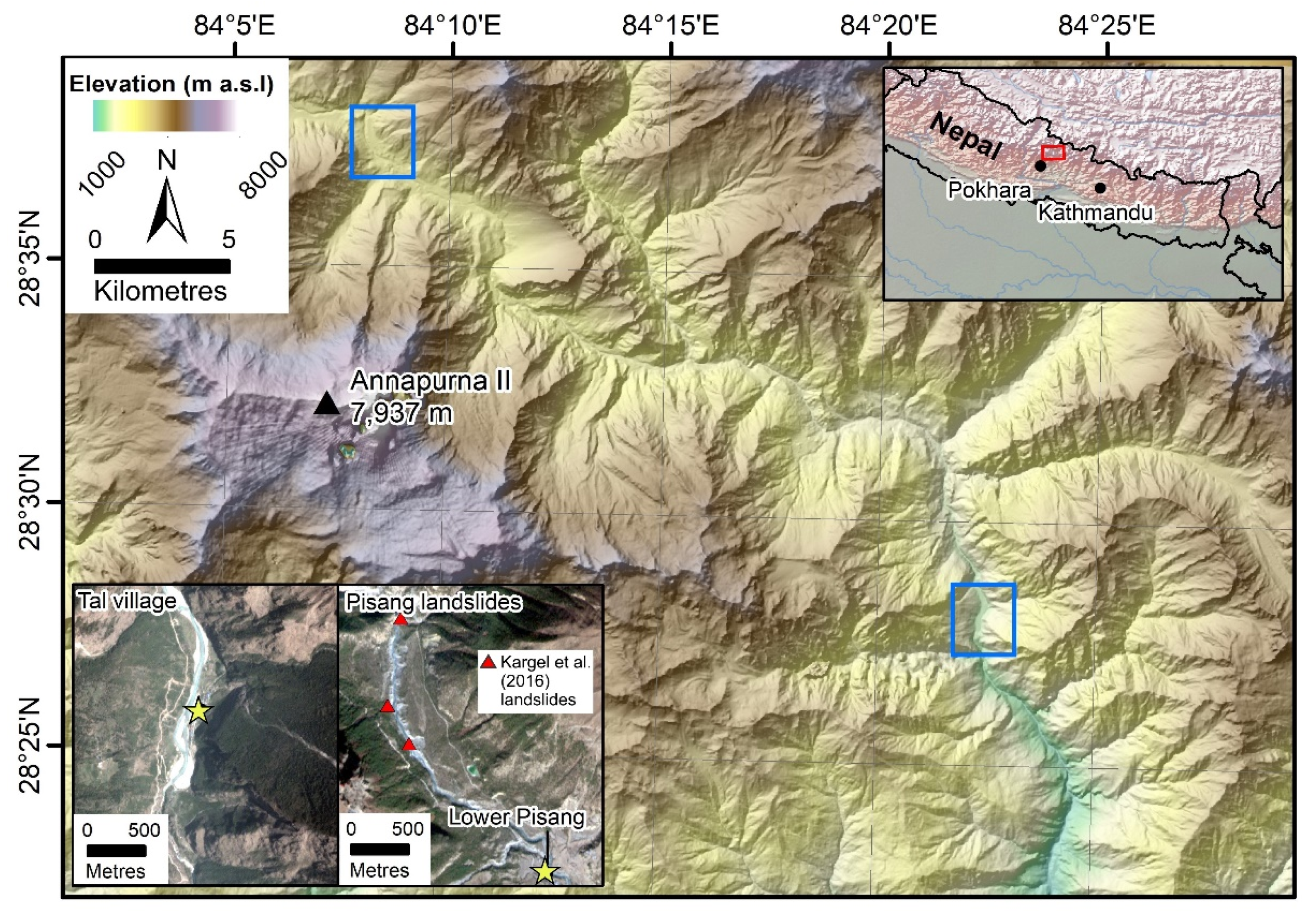
2.1. Study Sites
2.2. UAV Surveys
2.3. DEM Processing
2.4. Applications
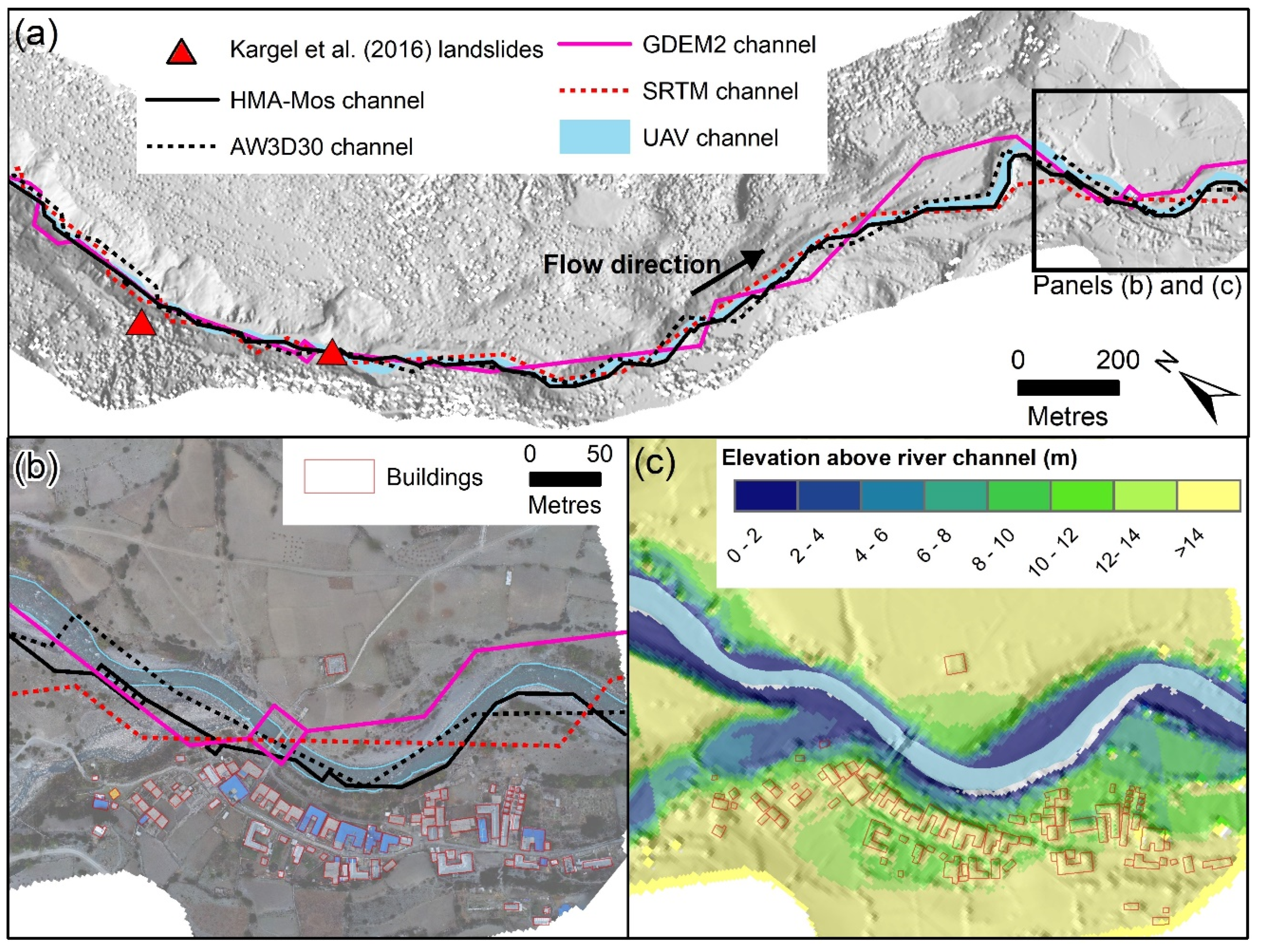
2.4.1. Elevation above the River Channel
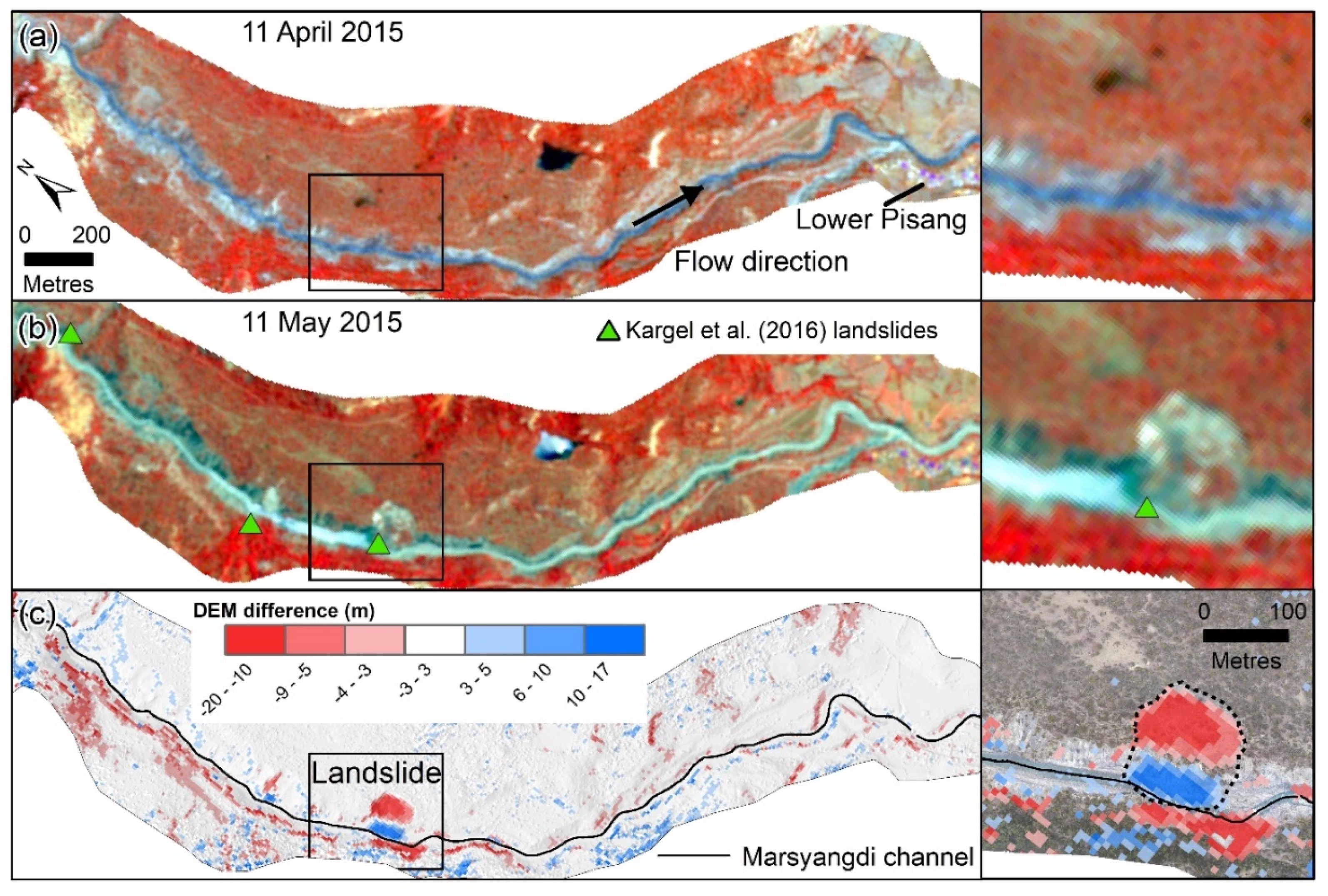
2.4.2. Landslides
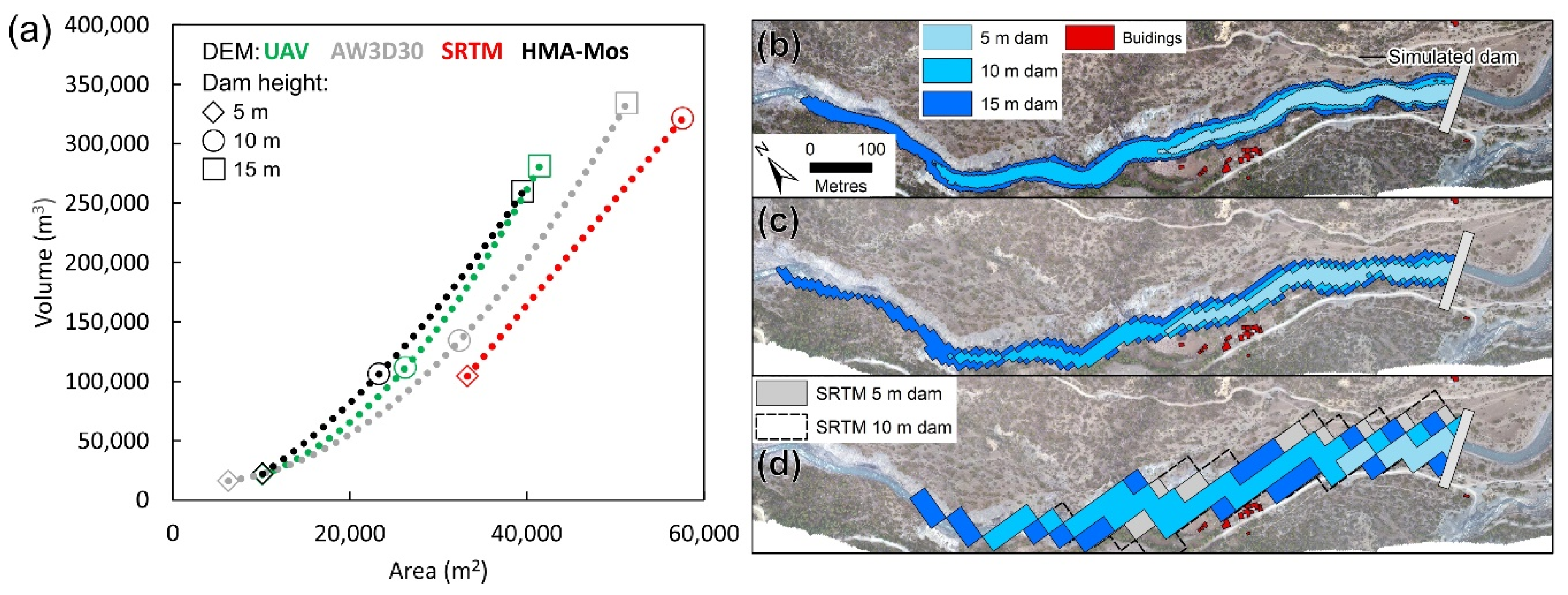
2.4.3. Outburst Flood
2.5. Uncertainties
3. Results
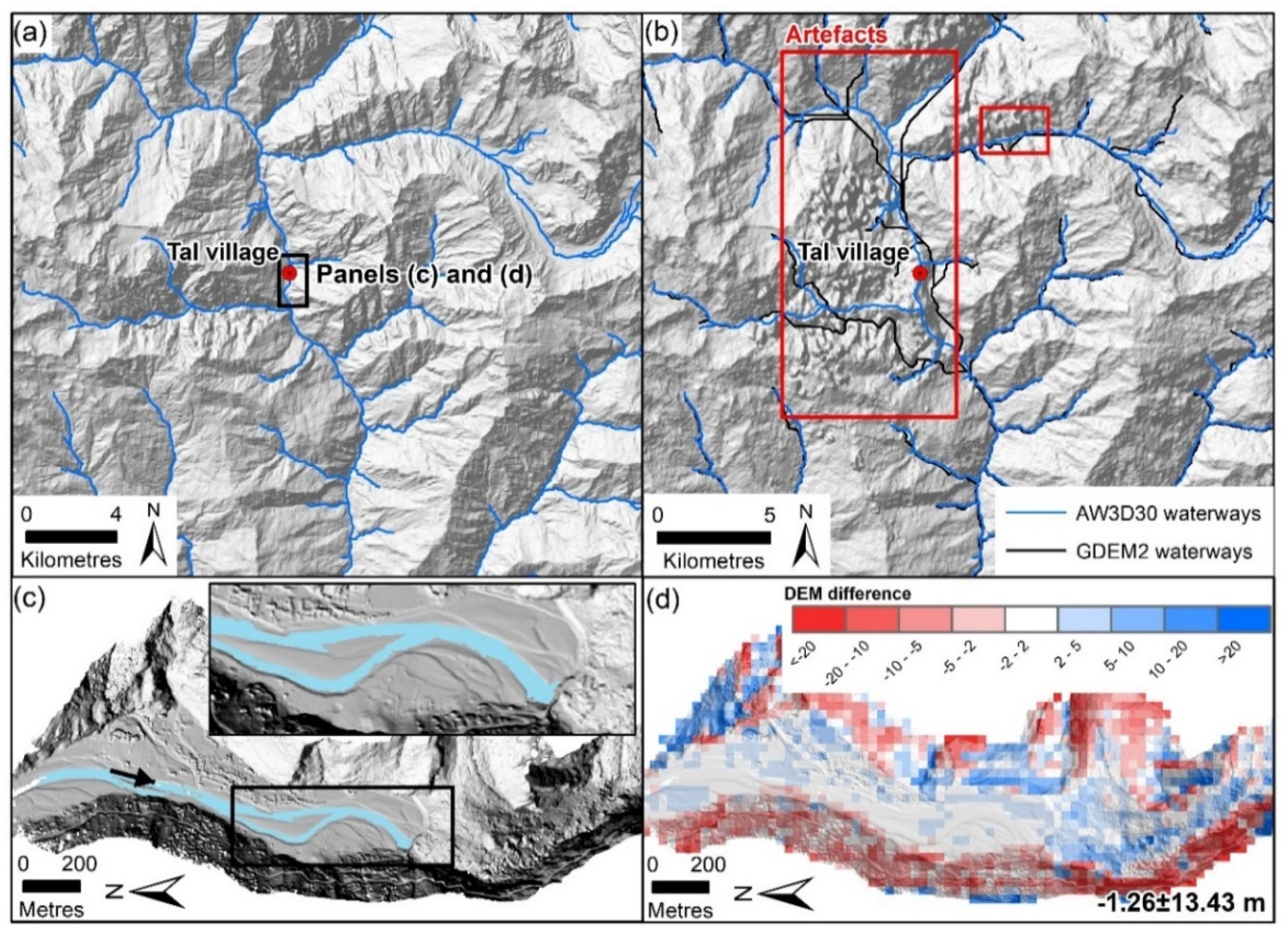
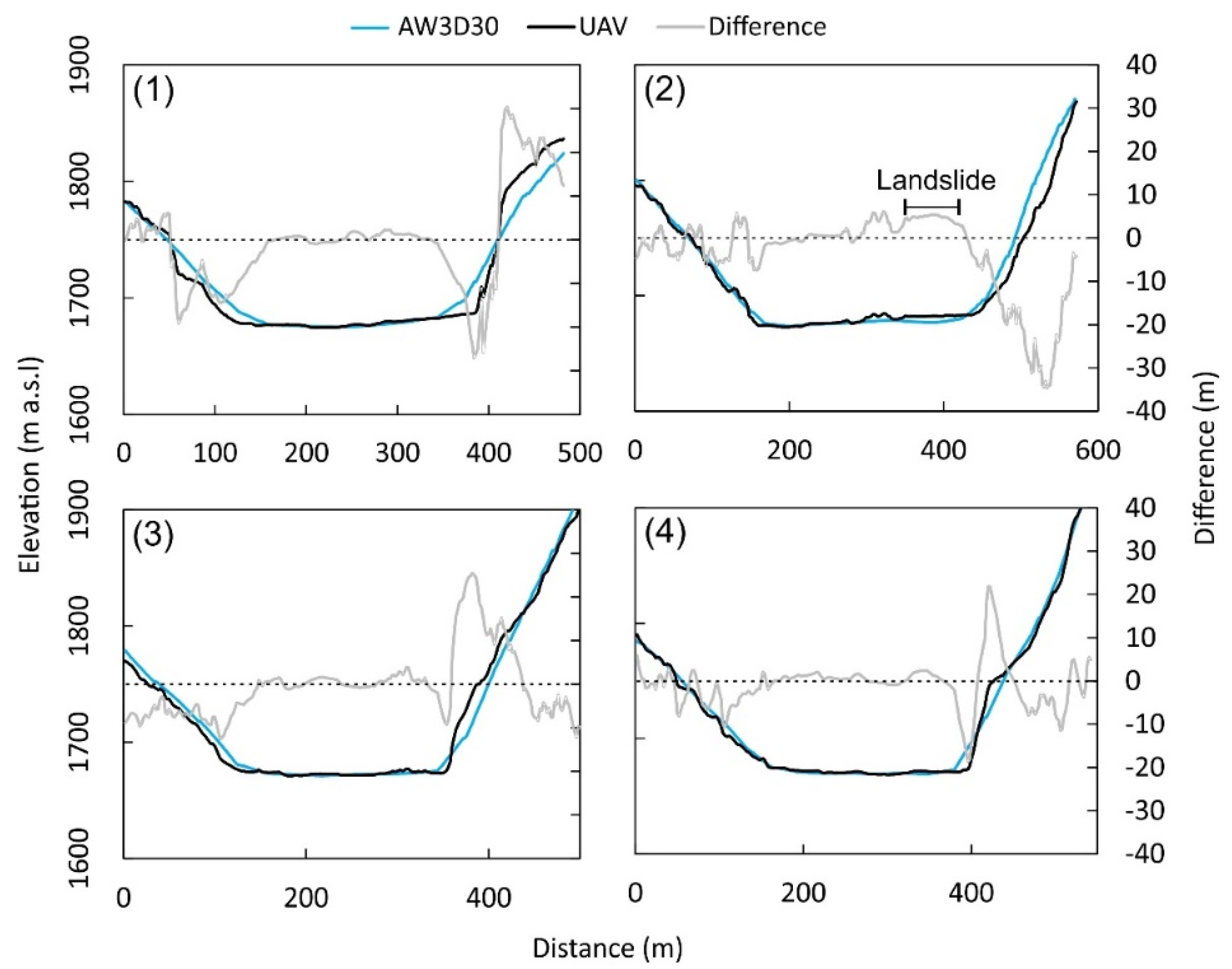
3.1. DEMs of Difference
3.2. Applications
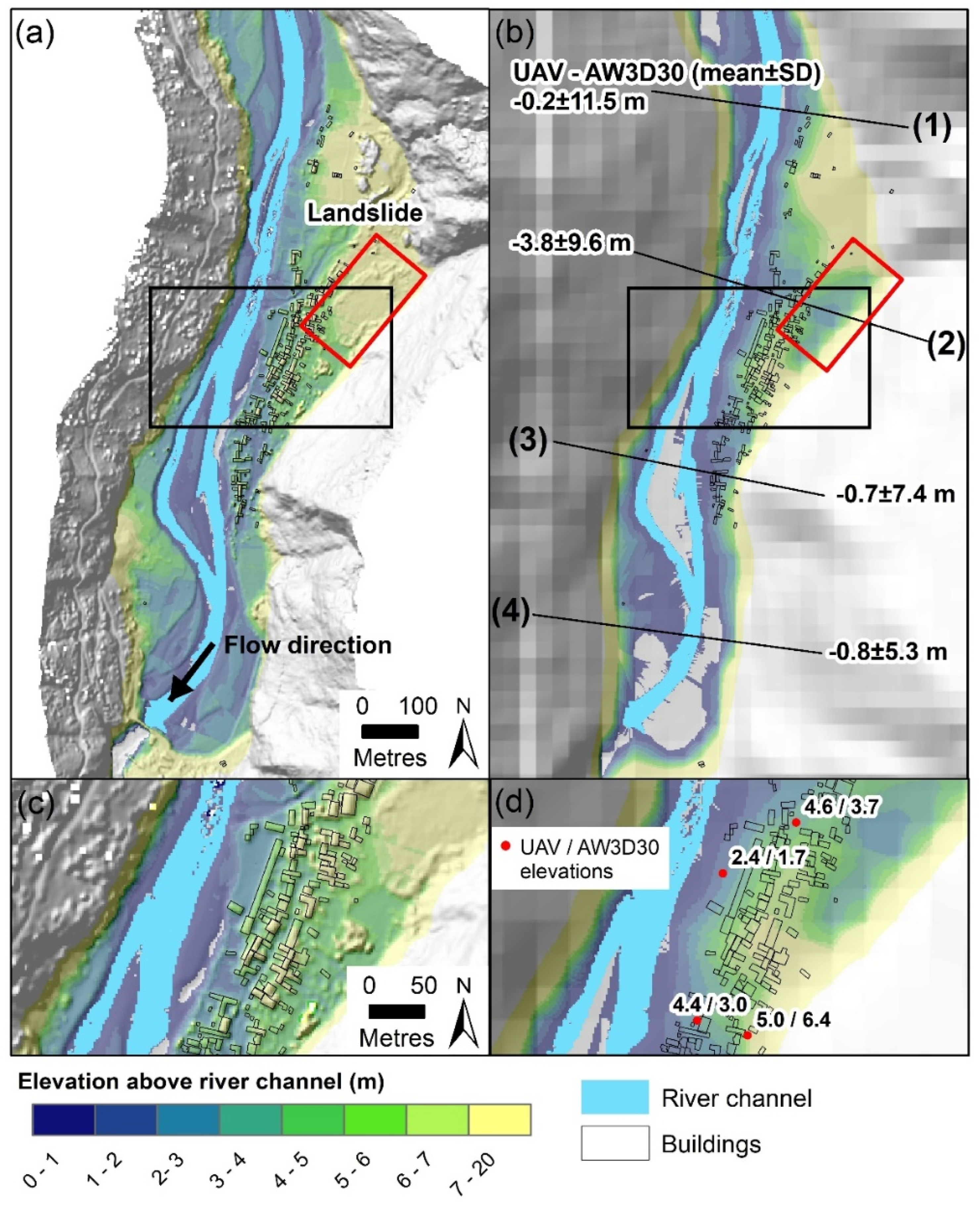
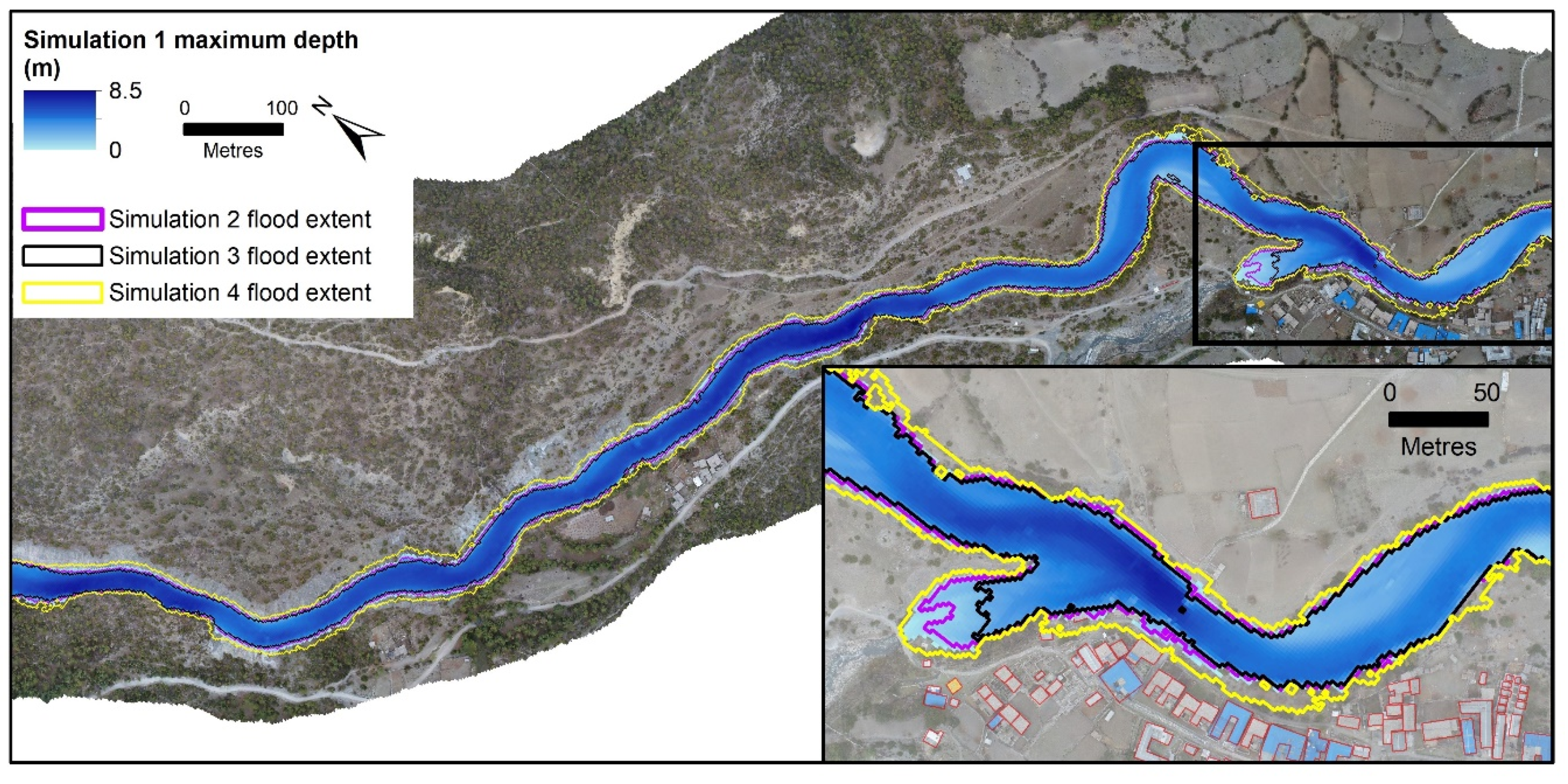
3.2.1. Flood Assessment
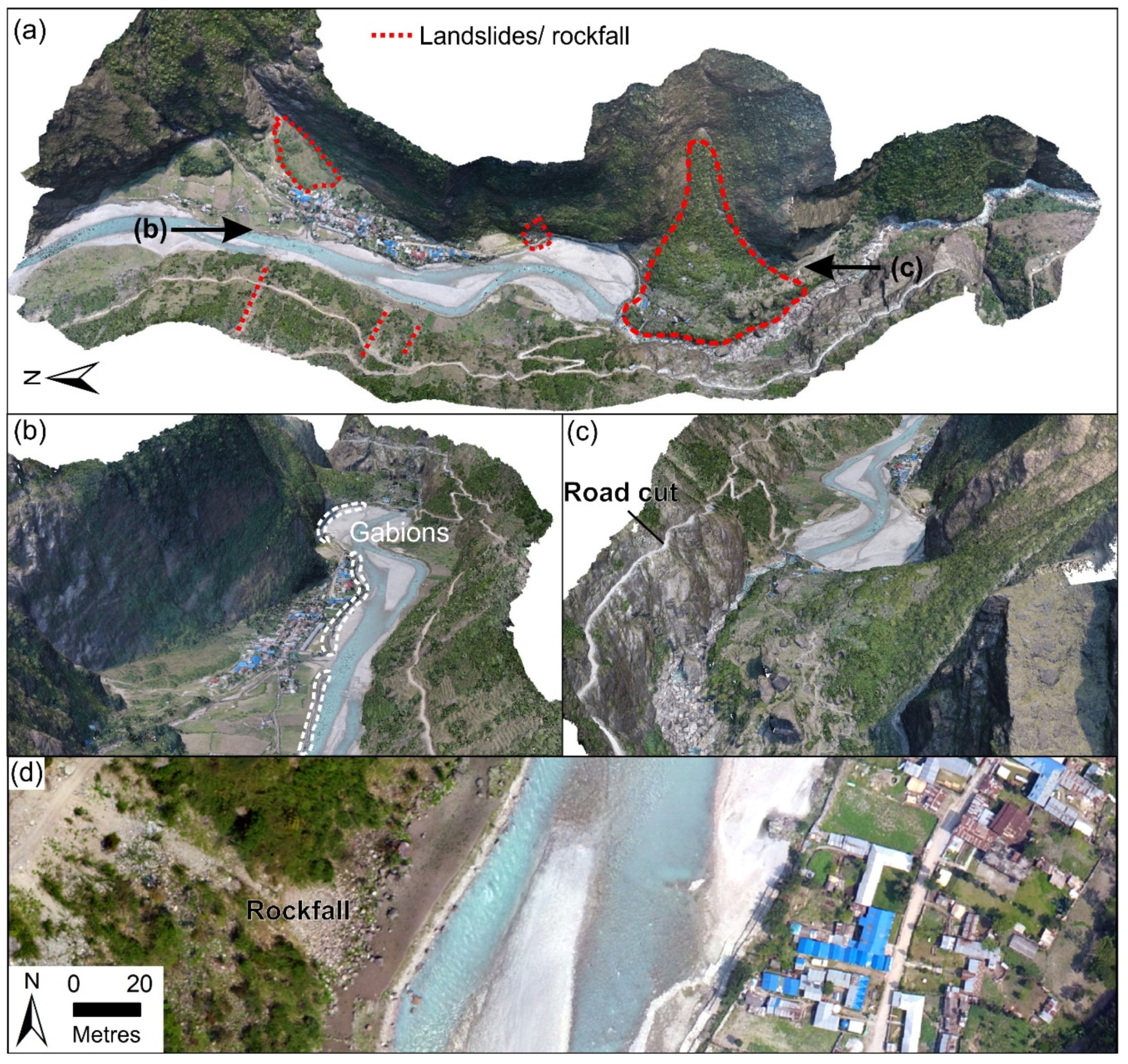
3.2.2. Landslides
3.2.3. Landslide-Dammed Lake
4. Discussion
4.1. DEM Differences
4.2. Landslides
4.3. Flood Assessment and Landslide-Dammed Lakes
4.4. DEMs for Hazard and Disaster Assessments
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fort, M.; Cossart, E.; Arnaud-Fassetta, G. Hillslope-channel coupling in the Nepal Himalayas and threat to man-made structures: The middle Kali Gandaki valley. Geomorphology 2010, 124, 178–199. [Google Scholar] [CrossRef]
- Robinson, T.R.; Rosser, N.J.; Densmore, A.L.; Williams, J.G.; Kincey, M.E.; Benjamin, J.; Bell, H.J.A. Rapid post-earthquake modelling of coseismic landslide intensity and distribution for emergency response decision support. Nat. Hazards Earth Syst. Sci. 2017, 17, 1521–1540. [Google Scholar] [CrossRef]
- Ambrosi, C.; Strozzi, T.; Scapozza, C.; Wegmüller, U. Landslide hazard assessment in the Himalayas (Nepal and Bhutan) based on Earth-Observation data. Eng. Geol. 2018, 237, 217–228. [Google Scholar] [CrossRef]
- Dunning, S.A.; Rosser, N.J.; Petley, D.N.; Massey, C.R. Formation and failure of the Tsatichhu landslide dam, Bhutan. Landslides 2006, 3, 107–113. [Google Scholar] [CrossRef]
- Kargel, J.S.; Leonard, G.J.; Shugar, D.H.; Haritashya, U.K.; Bevington, A.; Fielding, E.J.; Fujita, K.; Geertsema, M.; Miles, E.S.; Steiner, J.; et al. Geomorphic and geologic controls of geohazards induced by Nepal’s 2015 Gorkha earthquake. Science 2016, 351. [Google Scholar] [CrossRef] [PubMed]
- Fujita, K.; Suzuki, R.; Nuimura, T.; Sakai, A. Performance of ASTER and SRTM DEMs, and their potential for assessing glacial lakes in the Lunana Region, Bhutan Himalaya. J. Glaciol. 2008, 54, 220–228. [Google Scholar] [CrossRef]
- Rounce, D.; Watson, C.; McKinney, D. Identification of hazard and risk for glacial lakes in the Nepal Himalaya using satellite imagery from 2000–2015. Remote Sens. 2017, 9, 654. [Google Scholar] [CrossRef]
- Bolch, T.; Buchroithner, M.F.; Peters, J.; Baessler, M.; Bajracharya, S. Identification of glacier motion and potentially dangerous glacial lakes in the Mt. Everest region/Nepal using spaceborne imagery. Nat. Hazards Earth Syst. Sci. 2008, 8, 1329–1340. [Google Scholar] [CrossRef]
- Westoby, M.J.; Glasser, N.F.; Brasington, J.; Hambrey, M.J.; Quincey, D.J.; Reynolds, J.M. Modelling outburst floods from moraine-dammed glacial lakes. Earth-Sci. Rev. 2014, 134, 137–159. [Google Scholar] [CrossRef]
- Westoby, M.J.; Glasser, N.F.; Hambrey, M.J.; Brasington, J.; Reynolds, J.M.; Hassan, M.A.A.M. Reconstructing historic Glacial Lake Outburst Floods through numerical modelling and geomorphological assessment: Extreme events in the Himalaya. Earth Surf. Process. Landf. 2014, 39, 1675–1692. [Google Scholar] [CrossRef]
- Lala, J.M.; Rounce, D.R.; McKinney, D.C. Modeling the glacial lake outburst flood process chain in the Nepal Himalaya: Reassessing Imja Tsho’s hazard. Hydrol. Earth Syst. Sci. 2018, 22, 3721–3737. [Google Scholar] [CrossRef]
- Wang, W.; Yang, X.; Yao, T. Evaluation of ASTER GDEM and SRTM and their suitability in hydraulic modelling of a glacial lake outburst flood in southeast Tibet. Hydrol. Processes 2012, 26, 213–225. [Google Scholar] [CrossRef]
- Neupane, R.P.; White, J.D.; Alexander, S.E. Projected hydrologic changes in monsoon-dominated Himalaya Mountain basins with changing climate and deforestation. J. Hydrol. 2015, 525, 216–230. [Google Scholar] [CrossRef]
- Brun, F.; Berthier, E.; Wagnon, P.; Kaab, A.; Treichler, D. A spatially resolved estimate of High Mountain Asia glacier mass balances from 2000 to 2016. Nat. Geosci. 2017, 10, 668–673. [Google Scholar] [CrossRef] [PubMed]
- Watson, C.S.; Quincey, D.J.; Smith, M.W.; Carrivick, J.L.; Rowan, A.V.; James, M. Quantifying ice cliff evolution with multi-temporal point clouds on the debris-covered Khumbu Glacier, Nepal. J. Glaciol. 2017, 63, 823–837. [Google Scholar] [CrossRef]
- Thompson, S.; Benn, D.; Mertes, J.; Luckman, A. Stagnation and mass loss on a Himalayan debris-covered glacier: Processes, patterns and rates. J. Glaciol. 2016, 62, 467–485. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Kraaijenbrink, P.D.A.; Shea, J.M.; Shrestha, A.B.; Pellicciotti, F.; Bierkens, M.F.P.; de Jong, S.M. High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Tadono, T.; Ishida, H.; Oda, F.; Naito, S.; Minakawa, K.; Iwamoto, H. Precise global DEM generation by ALOS PRISM. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 71. [Google Scholar] [CrossRef]
- Gruber, F.E.; Mergili, M. Regional-scale analysis of high-mountain multi-hazard and risk indicators in the Pamir (Tajikistan) with GRASS GIS. Nat. Hazards Earth Syst. Sci. 2013, 13, 2779–2796. [Google Scholar] [CrossRef]
- Shean, D.E.; Alexandrov, O.; Moratto, Z.M.; Smith, B.E.; Joughin, I.R.; Porter, C.; Morin, P. An automated, open-source pipeline for mass production of digital elevation models (DEMs) from very-high-resolution commercial stereo satellite imagery. ISPRS J. Photogramm. Remote Sens. 2016, 116, 101–117. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117, 1–17. [Google Scholar] [CrossRef]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Progr. Phys. Geogr. 2015, 40, 1–29. [Google Scholar] [CrossRef]
- Zekkos, D.; Clark, M.; Whitworth, M.; Greenwood, W.; West, A.J.; Roback, K.; Li, G.; Chamlagain, D.; Manousakis, J.; Quackenbush, P.; et al. Observations of Landslides Caused by the April 2015 Gorkha, Nepal, Earthquake Based on Land, UAV, and Satellite Reconnaissance. Earthq. Spectra 2017, 33, S95–S114. [Google Scholar] [CrossRef]
- Greenwood, W.; Zekkos, D.; Lynch, J.; Bateman, J.; Clark, M.; Chamlagain, D. UAV-Based 3-D Characterization of Rock Masses and Rock Slides in Nepal. In Proceedings of the 50th U.S. Rock Mechanics/Geomechanics Symposium, Houston, TX, USA, 26–29 June 2016. [Google Scholar]
- Lucieer, A.; de Jong, S.M.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Progr. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Lindner, G.; Schraml, K.; Mansberger, R.; Hübl, J. UAV monitoring and documentation of a large landslide. Appl. Geomat. 2016, 8, 1–11. [Google Scholar] [CrossRef]
- Fernandez Galarreta, J.; Kerle, N.; Gerke, M. UAV-based urban structural damage assessment using object-based image analysis and semantic reasoning. Nat. Hazards Earth Syst. Sci. 2015, 15, 1087–1101. [Google Scholar] [CrossRef]
- Williams, J.G.; Rosser, N.J.; Kincey, M.E.; Benjamin, J.; Oven, K.J.; Densmore, A.L.; Milledge, D.G.; Robinson, T.R.; Jordan, C.A.; Dijkstra, T.A. Satellite-based emergency mapping using optical imagery: Experience and reflections from the 2015 Nepal earthquakes. Nat. Hazards Earth Syst. Sci. 2018, 18, 185–205. [Google Scholar] [CrossRef]
- Waltham, T. Very large landslides in the Himalayas. Geol. Today 1996, 12, 181–185. [Google Scholar] [CrossRef]
- Planet Team. Planet Application Program Interface: In Space for Life on Earth; Planet Team: San Francisco, CA, USA, 2018; Available online: https://api.planet.com (accessed on 8 February 2019).
- Westoby, M.J.; Dunning, S.A.; Woodward, J.; Hein, A.S.; Marrero, S.M.; Winter, K.; Sugden, D.E. Interannual surface evolution of an Antarctic blue-ice moraine using multi-temporal DEMs. Earth Surf. Dyn. 2016, 4, 515–529. [Google Scholar] [CrossRef]
- Ewertowski, M.W.; Tomczyk, A.M.; Evans, D.J.A.; Roberts, D.H.; Ewertowski, W. Operational Framework for Rapid, Very-high Resolution Mapping of Glacial Geomorphology Using Low-cost Unmanned Aerial Vehicles and Structure-from-Motion Approach. Remote Sens. 2019, 11, 65. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Shean, D. High Mountain Asia 8-meter DEM Mosaics Derived from Optical Imagery, Version 1. Tile-641; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2018. Available online: https://doi.org/10.5067/KXOVQ9L172S2 (accessed on 19 July 2018).
- Shean, D. High Mountain Asia 8-meter DEMs Derived from Along-Track Optical Imagery, Version 1. AT_20131120_0508; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2018. Available online: https://doi.org/10.5067/GSACB044M4PK (accessed on 27 July 2018).
- Tachikawa, T.; Hato, M.; Kaku, M.; Iwasaki, A. Characteristics of ASTER GDEM version 2. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 3657–3660. [Google Scholar]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007. [Google Scholar] [CrossRef]
- Nuth, C.; Kääb, A. Co-registration and bias corrections of satellite elevation data sets for quantifying glacier thickness change. The Cryosphere 2011, 5, 271–290. [Google Scholar] [CrossRef]
- OpenStreetMap Contributors. OpenStreetMap. 2019. Available online: https://www.openstreetmap.org (accessed on 23 August 2018).
- Chow, V.T. Open-Channel Hydraulics; McGraw-Hill Book Co.: New York, NY, USA, 1959. [Google Scholar]
- Bolch, T.; Pieczonka, T.; Benn, D.I. Multi-decadal mass loss of glaciers in the Everest area (Nepal Himalaya) derived from stereo imagery. Cryosphere 2011, 5, 349–358. [Google Scholar] [CrossRef]
- King, O.; Quincey, D.J.; Carrivick, J.L.; Rowan, A.V. Spatial variability in mass loss of glaciers in the Everest region, central Himalayas, between 2000 and 2015. Cryosphere 2017, 11, 407–426. [Google Scholar] [CrossRef]
- Weidinger, J. Landslide dams in the high mountains of India, Nepal and China-stability and life span of their dammed lakes. Ital. J. Eng. Geol. Environ. Spec. Issue 1 2006. [Google Scholar] [CrossRef]
- Tachikawa, T.; Kaku, M.; Iwasaki, A.; Gesch, D.; Oimoen, M.; Zhang, Z.; Danielson, J.; Krieger, T.; Curtis, B.; Haase, J. ASTER Global Digital Elevation Model Version 2–Summary of Validation Results; NASA: Pasadena, CA, USA, 2011.
- Purinton, B.; Bookhagen, B. Validation of digital elevation models (DEMs) and comparison of geomorphic metrics on the southern Central Andean Plateau. Earth Surf. Dyn. 2017, 5, 211–237. [Google Scholar] [CrossRef]
- Hayakawa, Y.S.; Oguchi, T.; Lin, Z. Comparison of new and existing global digital elevation models: ASTER G-DEM and SRTM-3. Geophys. Res. Lett. 2008, 35, L17404. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Cella, U.M.d.; Roncella, R.; Santise, M. Quality Assessment of DSMs Produced from UAV Flights Georeferenced with On-Board RTK Positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]
- Fazeli, H.; Samadzadegan, F.; Dadrasjavan, F. Evaluating the potential of RTK-UAV for automatic point cloud generation in 3D rapid mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 221. [Google Scholar] [CrossRef]
- Gichamo, T.Z.; Popescu, I.; Jonoski, A.; Solomatine, D. River cross-section extraction from the ASTER global DEM for flood modeling. Environ. Model. Softw. 2012, 31, 37–46. [Google Scholar] [CrossRef]
- Watson, C.S.; Carrivick, J.; Quincey, D. An improved method to represent DEM uncertainty in glacial lake outburst flood propagation using stochastic simulations. J. Hydrol. 2015, 529, 1373–1389. [Google Scholar] [CrossRef]
- Byers, A.; McKinney, D.; Somos-Valenzuela, M.; Watanabe, T.; Lamsal, D. Glacial lakes of the Hinku and Hongu valleys, Makalu Barun National Park and Buffer Zone, Nepal. Nat. Hazards 2013, 69, 115–139. [Google Scholar] [CrossRef]
- Schwanghart, W.; Scherler, D. Bumps in river profiles: Uncertainty assessment and smoothing using quantile regression techniques. Earth Surf. Dyn. 2017, 5, 821–839. [Google Scholar] [CrossRef]
- Stumpf, A.; Malet, J.P.; Allemand, P.; Pierrot-Deseilligny, M.; Skupinski, G. Ground-based multi-view photogrammetry for the monitoring of landslide deformation and erosion. Geomorphology 2015, 231, 130–145. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- Swiss Foundation for Mine Action. Small-scale Mapping with Consumer Drones in Nepal. 2019. Available online: https://drones.fsd.ch/en/3561/ (accessed on 11 January 2019).
- Inoue, H.; Ohsumi, T.; Fukui, H.; Guragain, R.; Basyal, G.K.; Chaudhary, S.; Adhikari, S.R. Damage Mapping of April 2015 Nepal Earthquake using Small UAV. 2019. Available online: https://www.jst.go.jp/inter/sicp/country/j-rapid/nepal/pdf/j-rapid_nepal_inoue.pdf (accessed on 11 January 2019).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Consideration | Advantages of UAV Surveying Compared to Satellite Imaging | Limitations of UAV Surveying Compared to Satellite Imaging |
|---|---|---|
| Weather | Flying underneath a cloud base Flying during optimum lighting conditions | Maximum wind speed restrictions Reduced battery life and risk of equipment loss in adverse weather conditions |
| Altitude | Variable aboveground flight altitude to determine imagery resolution | Maximum aboveground flight altitude may be fixed in commercial UAVs (e.g., 500 m) or by local/national regulations |
| Topography | Optimise flight time to minimise shadows Improved slope coverage from multiazimuthal look angles and avoidance of layover Ability to resolve overhanging topography | Requirement to navigate complex topography or rely on autonomous navigation |
| Spatial and spectral coverage | Tailored coverage to an area of interest with manual flight control or autonomous route planning software Higher spatial resolution | Limited survey footprint (several square kilometres vs. tens of square kilometres) UAV surveys may need to maintain line of sight to operator for practical reasons or permit compliance Fewer spectral bands Heterogeneous resolution |
| Temporal coverage | Investigator-specified repeat interval and season or time of day, and coordination with other field campaign data acquisitions | Fewer repeat times related to high cost of field deployments compared to continuously operated satellites |
| In situ validation | Simultaneous in situ validation of DEM accuracy and assessment of land cover and material properties is possible | |
| Permissions, cost, and data availability | Potential to crowdsource imagery following a disaster or to generate baseline topography for ongoing monitoring | Transportation costs and import regulations Permit, licensing, and liability insurance requirements Local permissions or objections to flights Higher costs per square kilometre of survey due to fieldwork deployment |
| Site (Date) | Images | GCPs | Dense Cloud Points (×106) | RMS Error (m)/(pix) | Exported DEM Resolution (m) 2 |
|---|---|---|---|---|---|
| Tal village (April 2018) | 449 | 7 | 122.95 | 1.12/0.87 | 2 |
| Pisang landslides (April 2018) | 409 | 0 | 109.44 | 6.54 1/0.69 | 2 |
| Site | DEM Difference | Mean Elevation Difference (m) | Standard Deviation (m) | Uncertainty (m) |
|---|---|---|---|---|
| Tal village | UAV − AW3D30 | −1.26 | 13.43 | 2.38 |
| Pisang landslides | UAV − HMA | −0.11 | 2.61 | 0.22 |
| UAV − GDEM2 | 1.00 | 12.26 | 2.09 | |
| UAV − AW3D30 | −0.13 | 7.88 | 1.19 | |
| UAV − SRTM | 0.06 | 7.74 | 1.16 |
| DEM | Distance between DEM- and UAV-Derived River Channels (m) | Mean Building Elevation above the River Channel (m) | |
|---|---|---|---|
| Mean ± SD | Maximum | ||
| HMA-Mos | 3.1 ± 5.6 | 33.2 | 14.2 ± 5.7 |
| AW3D30 | 6.4 ± 7.3 | 36.8 | 9.2 ± 4.9 |
| GDEM2 | 16.7 ± 19.5 | 97.9 | 13.1 ± 6.5 |
| SRTM | 7.6 ± 9.3 | 47.0 | 6.1 ± 4.9 |
| UAV | - | - | 16.0 ± 5.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Watson, C.S.; Kargel, J.S.; Tiruwa, B. UAV-Derived Himalayan Topography: Hazard Assessments and Comparison with Global DEM Products. Drones 2019, 3, 18. https://doi.org/10.3390/drones3010018
Watson CS, Kargel JS, Tiruwa B. UAV-Derived Himalayan Topography: Hazard Assessments and Comparison with Global DEM Products. Drones. 2019; 3(1):18. https://doi.org/10.3390/drones3010018
Chicago/Turabian StyleWatson, C. Scott, Jeffrey S. Kargel, and Babulal Tiruwa. 2019. "UAV-Derived Himalayan Topography: Hazard Assessments and Comparison with Global DEM Products" Drones 3, no. 1: 18. https://doi.org/10.3390/drones3010018
APA StyleWatson, C. S., Kargel, J. S., & Tiruwa, B. (2019). UAV-Derived Himalayan Topography: Hazard Assessments and Comparison with Global DEM Products. Drones, 3(1), 18. https://doi.org/10.3390/drones3010018