A Novel Approach for Brushless DC Motors Characterization in Drones Based on Chaos

 , ,
, , 
Abstract
:1. Introduction
2. Signal Analysis using Chaos based of Density of Maxima (SAC-DM)
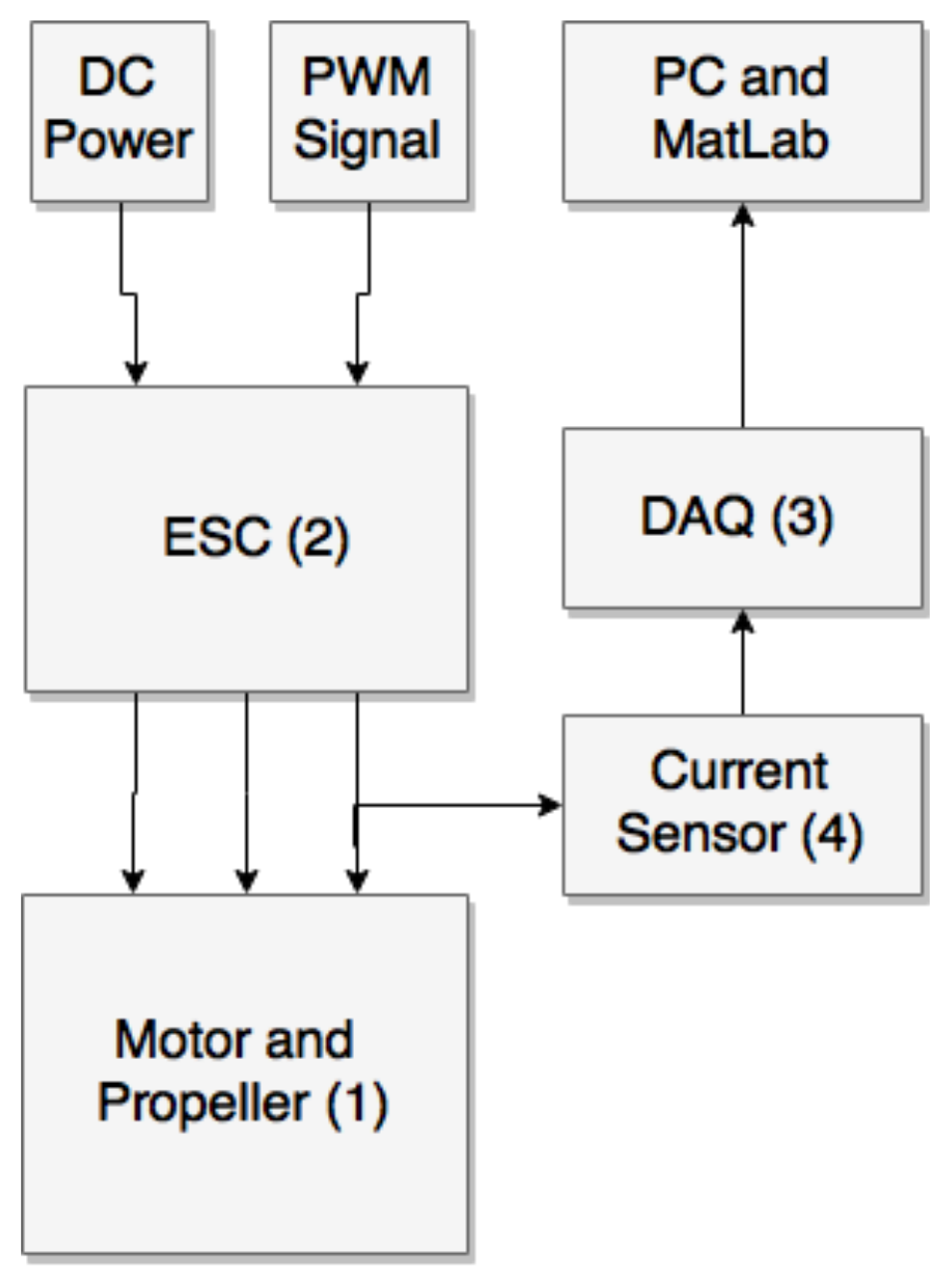
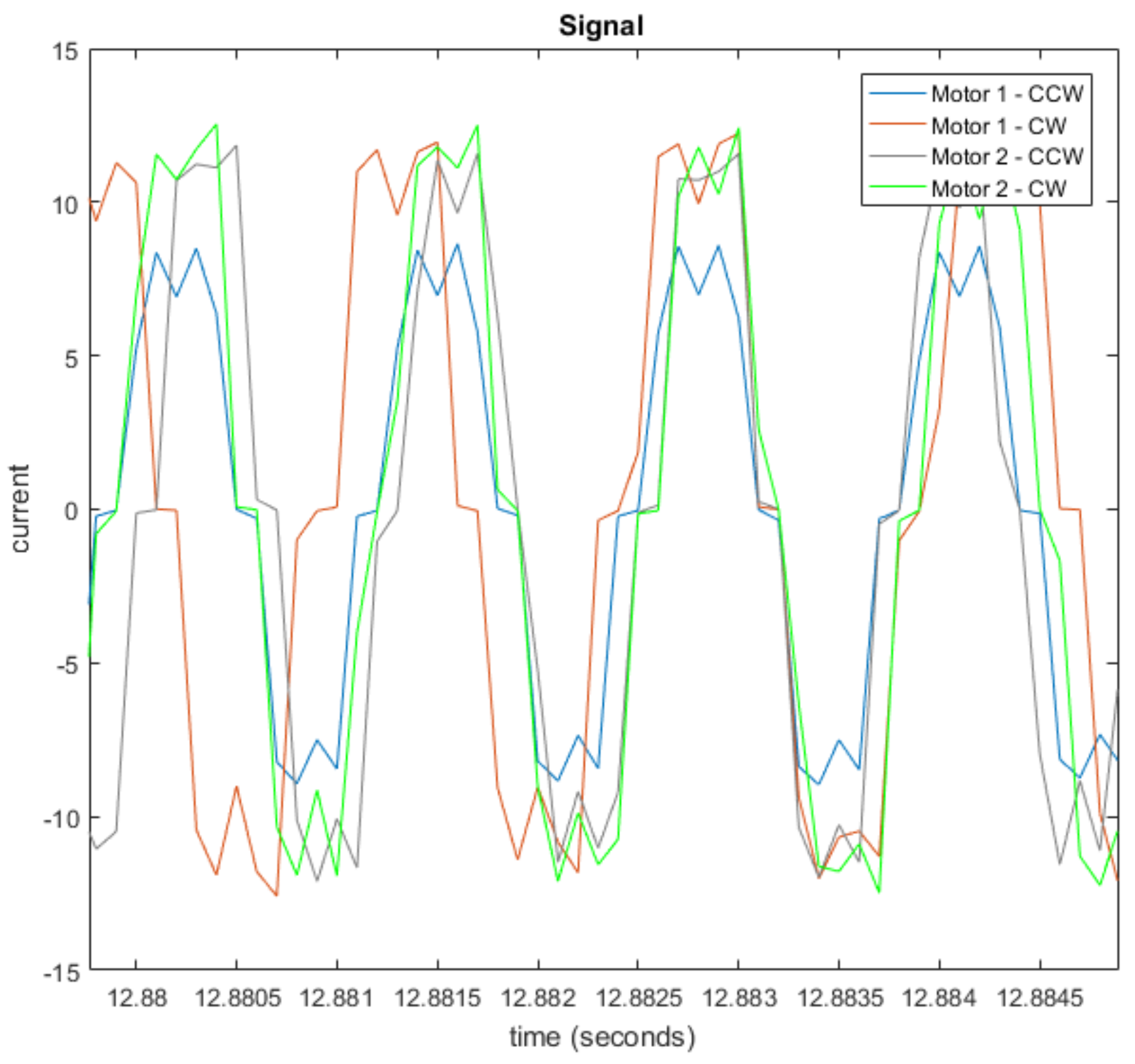
3. Experimental Scenarios
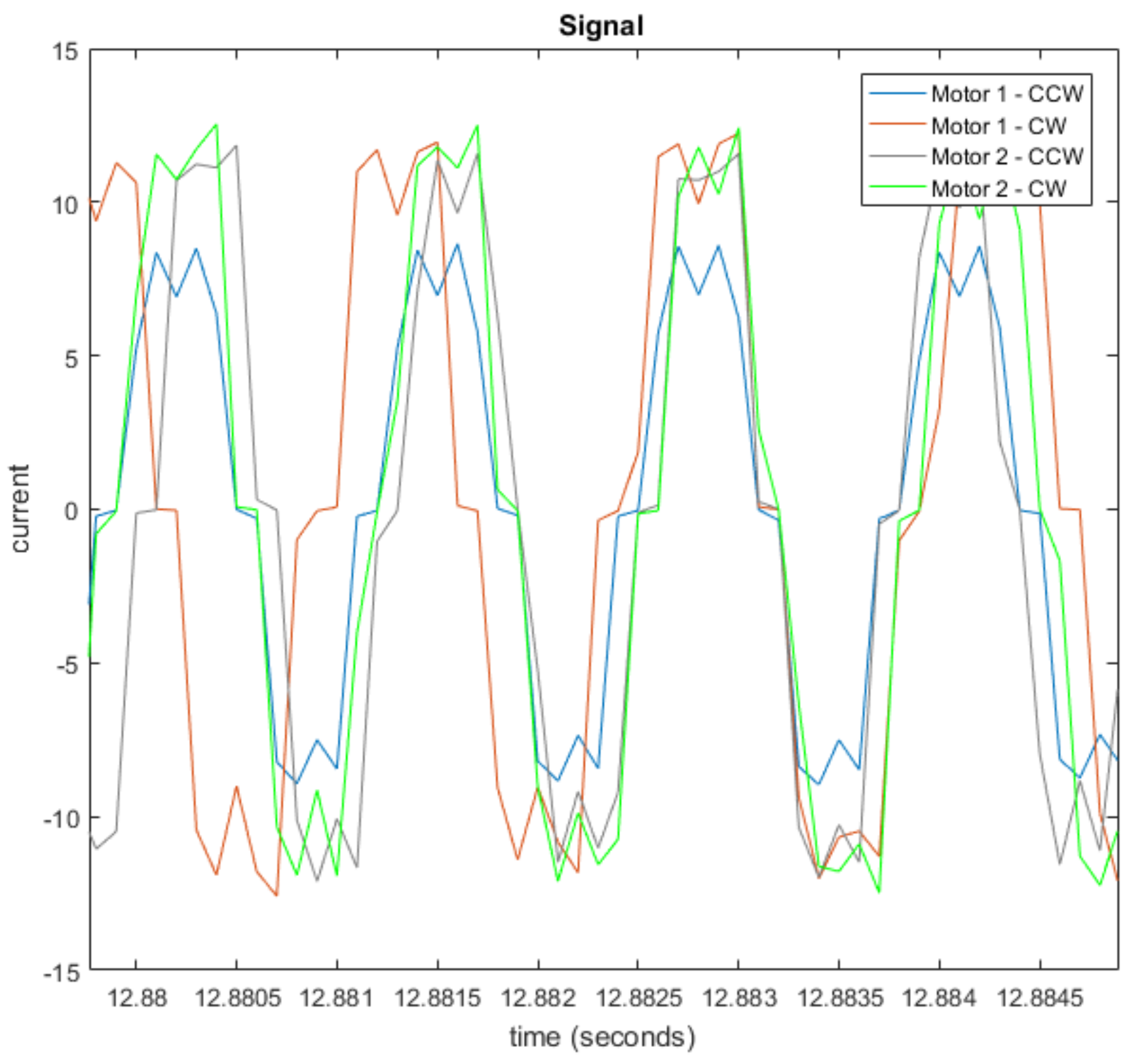
4. Signal Analysis Using Traditional Approaches
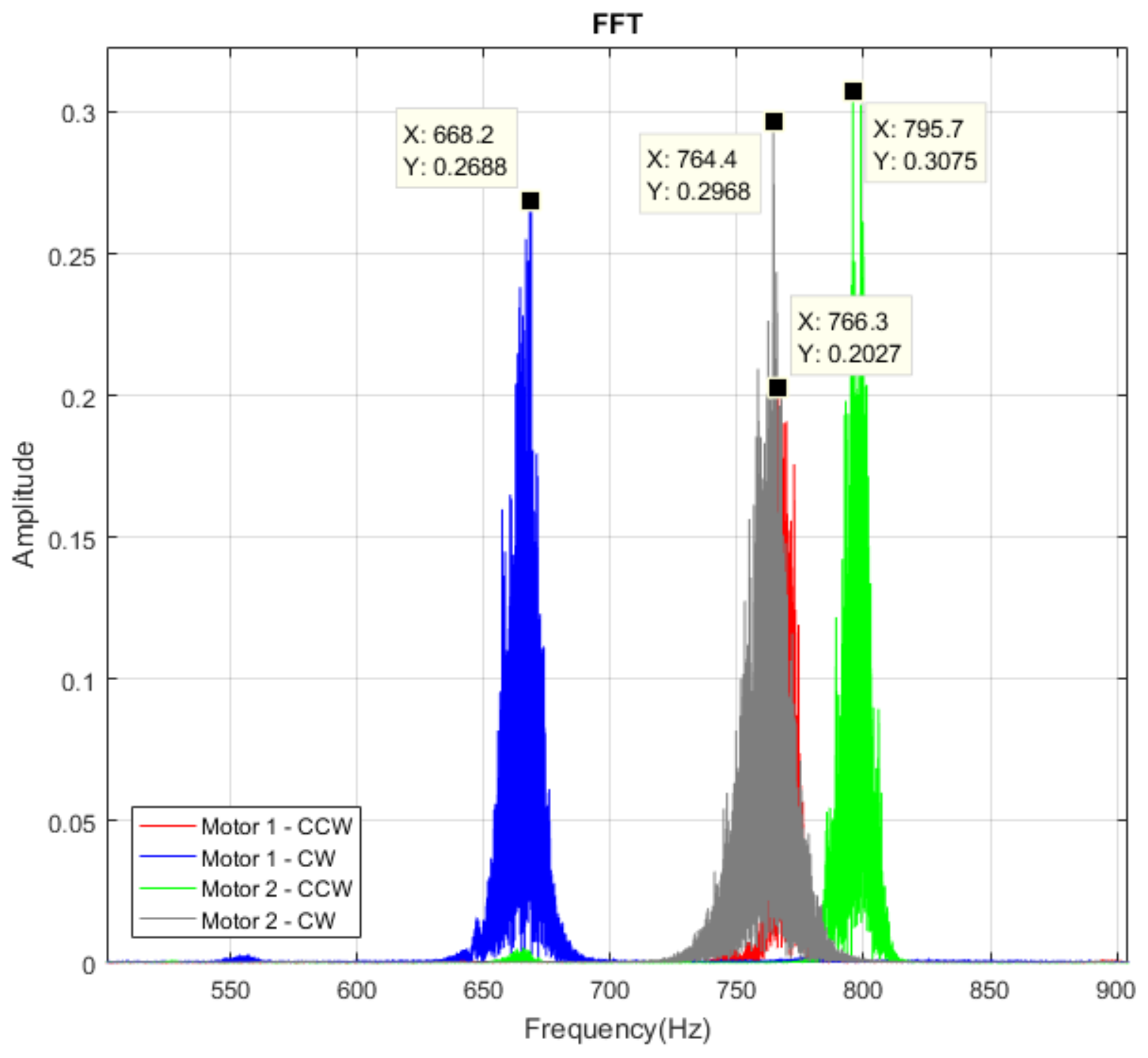
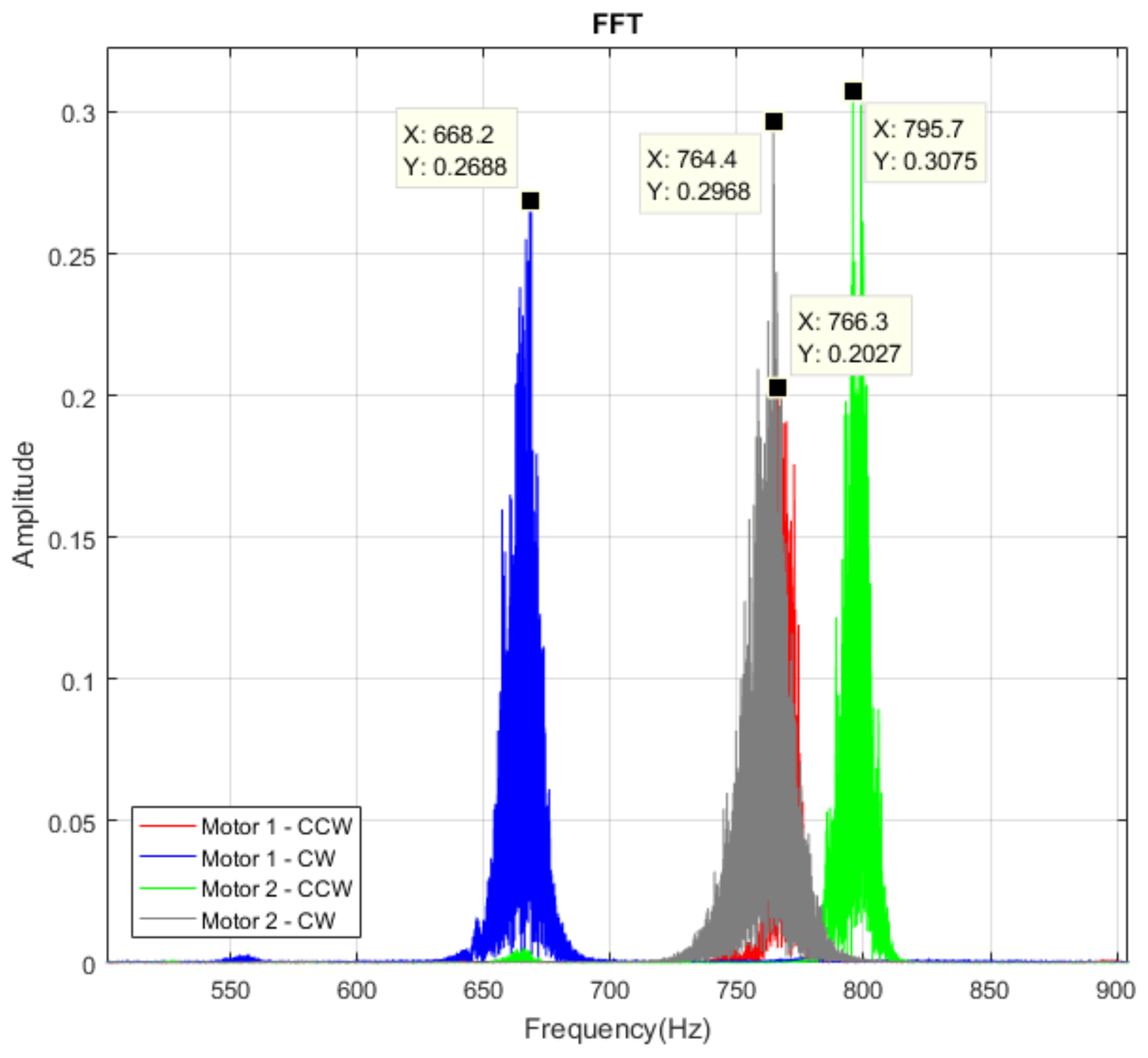
4.1. Fast Fourier Transform (FFT)
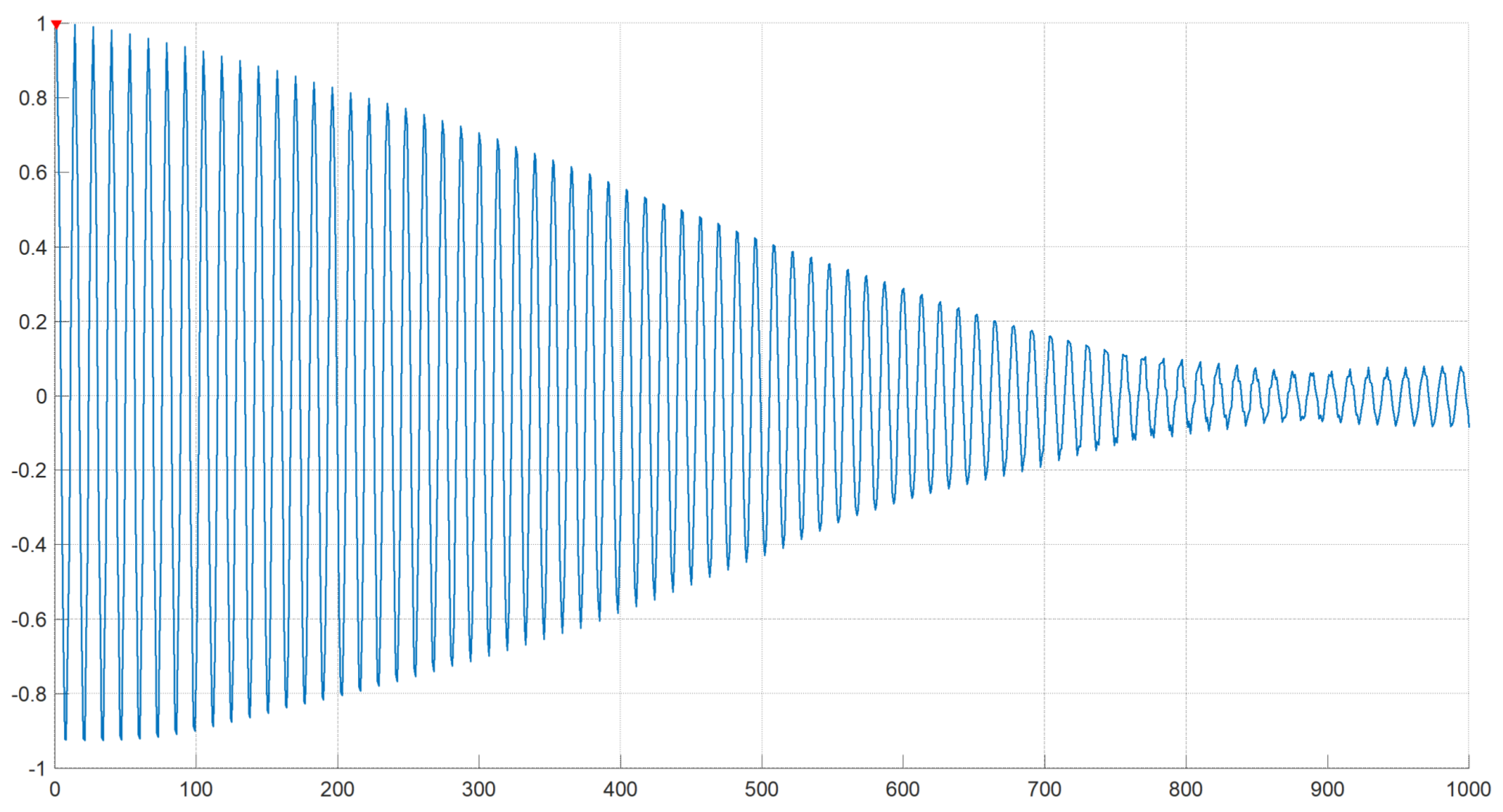
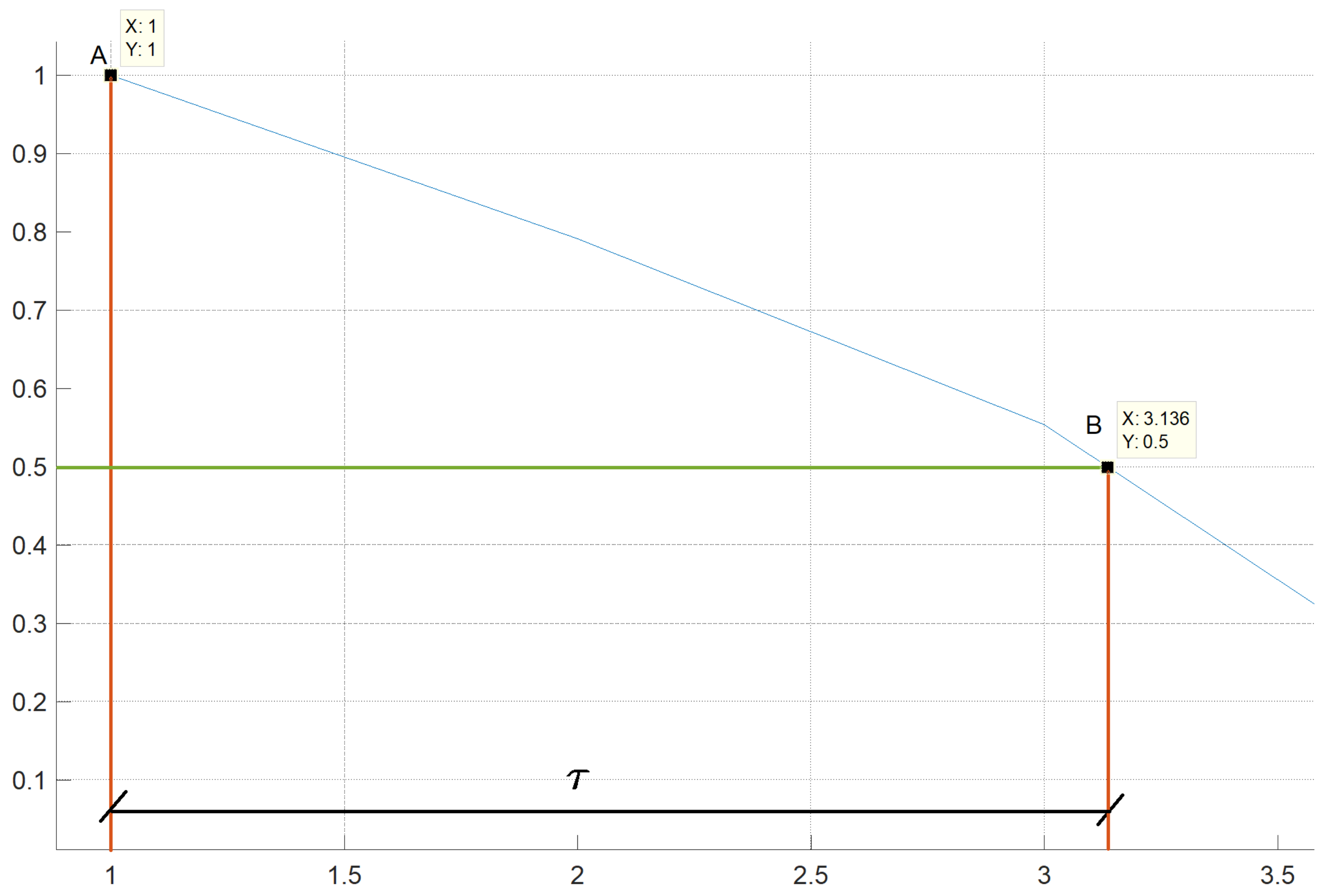
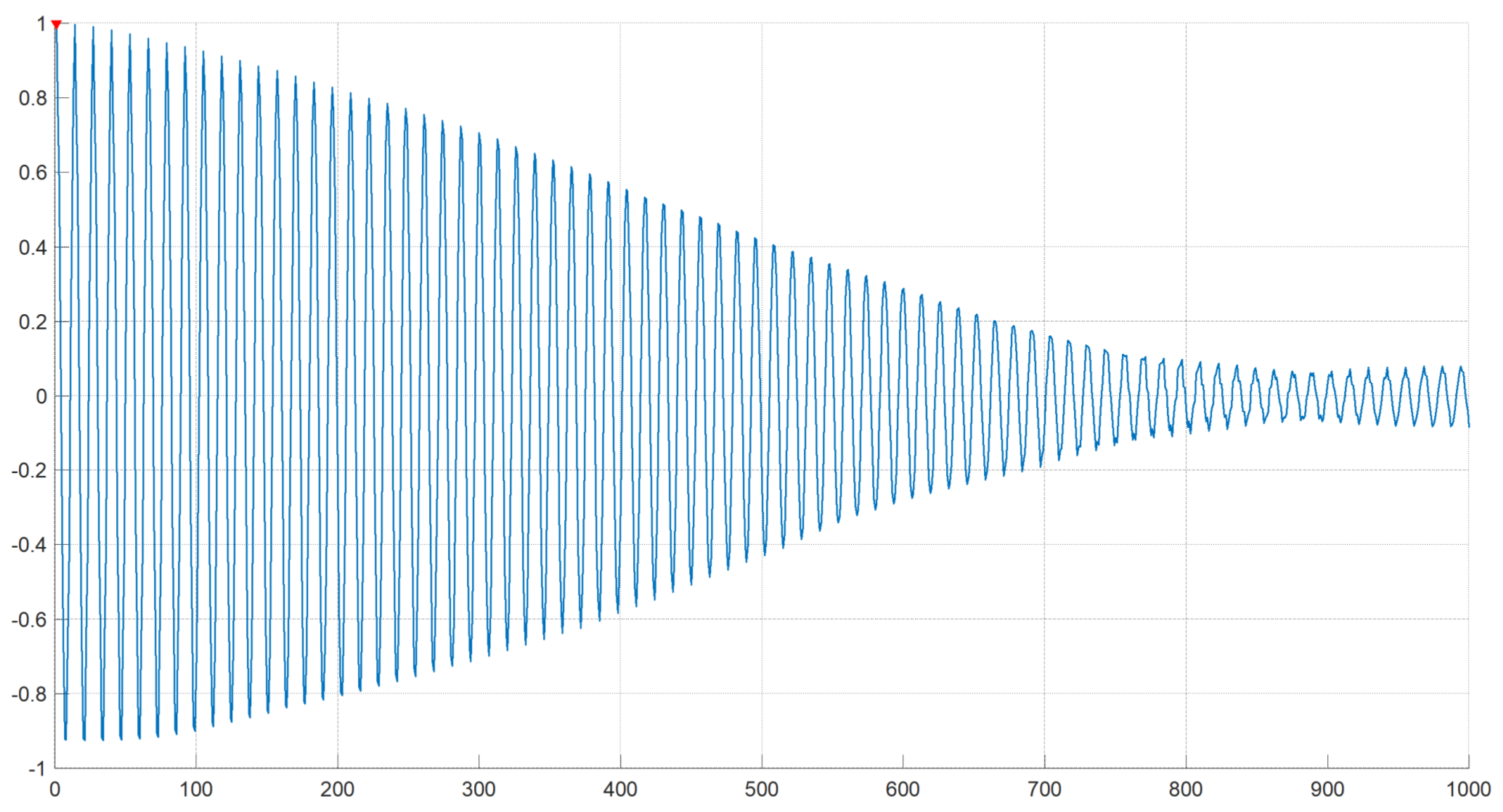
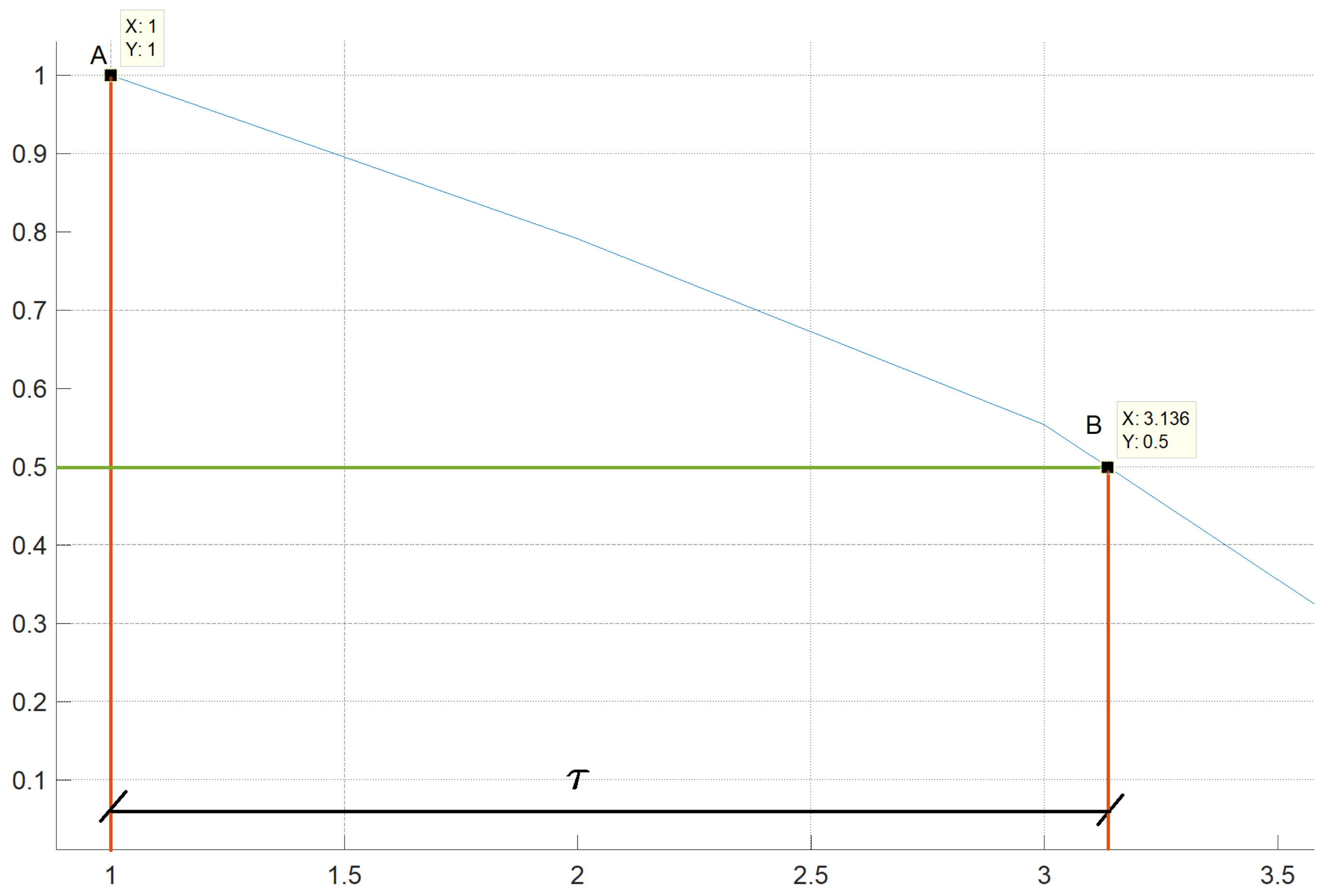
4.2. Correlation Length Coefficient (CLC)
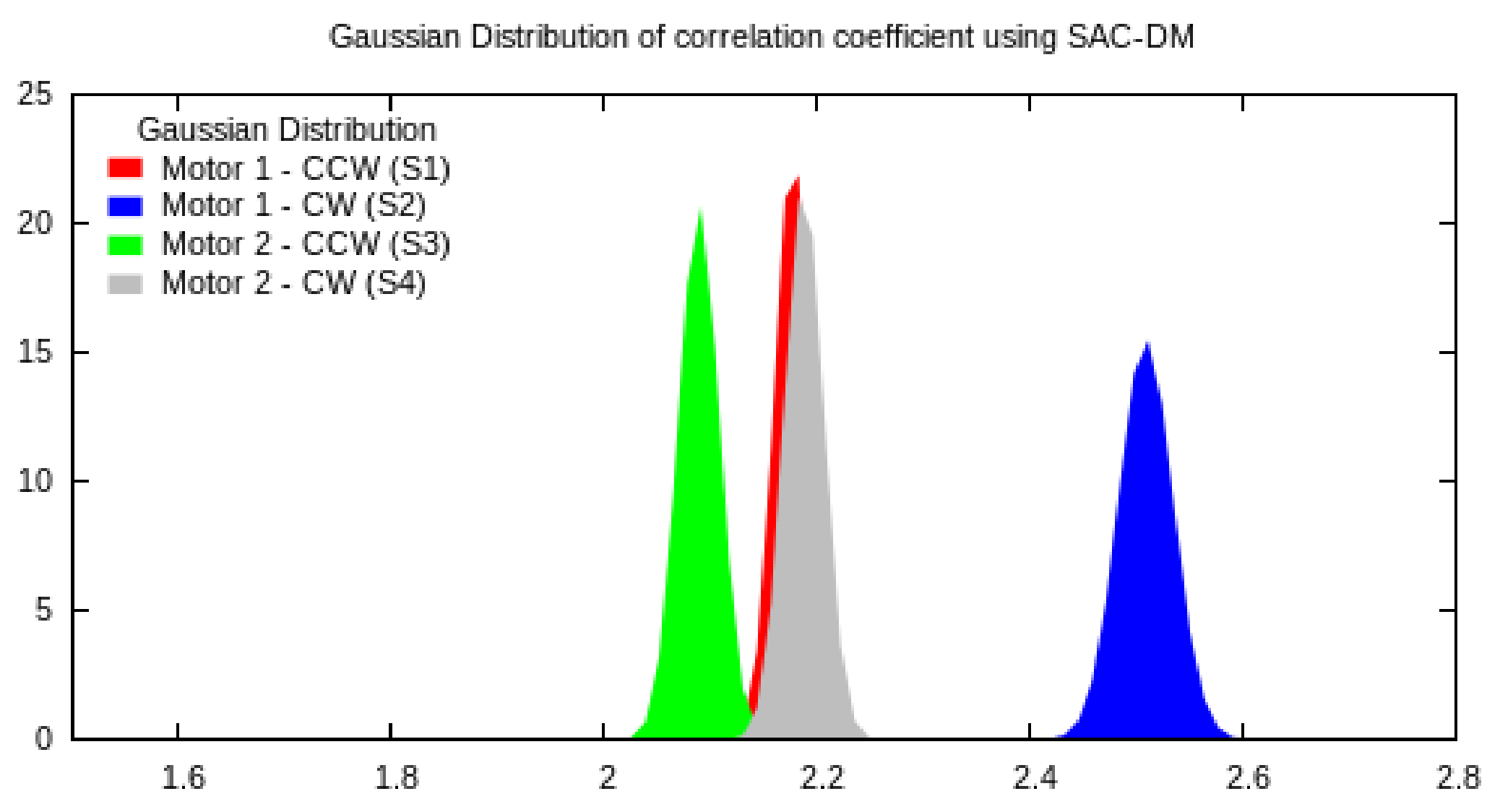
5. Results with SAC-DM
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Kuzma, J.; O’Sullivan, S.; Philippe, T.; Koehler, J.; Coronel, R. Commercialization Strategy in Managing Online Presence in the Unmanned Aerial Vehicle Industry. Int. J. Bus. Strateg. 2017, 17, 59–68. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Mills, M.P. Drone Disruption: The Stakes, The Players, And The Opportunities. 2017. Available online: https://www.forbes.com (accessed on 20 March 2017).
- Yuan, Y.; Yuan, H.; Guo, L.; Yang, H.; Sun, S. Resilient Control of Networked Control System under DoS Attacks: A Unified Game Approach. IEEE Trans. Ind. Inform. 2016, 12, 1786–1794. [Google Scholar] [CrossRef]
- Xiao, B.; Yin, S. A New Disturbance Attenuation Control Scheme for Quadrotor Unmanned Aerial Vehicles. IEEE Trans. Ind. Inform. 2017, 13, 2922–2932. [Google Scholar] [CrossRef]
- Lopatinsky, E.; Schaefer, D.; Rosenfeld, S.; Fedoseyev, L. Brushless DC Electric Motor. U.S. Patent 7,112,910, 26 September 2006. [Google Scholar]
- Park, B.G.; Lee, K.J.; Kim, R.Y.; Kim, T.S.; Ryu, J.S.; Hyun, D.S. Simple Fault Diagnosis Based on Operating Characteristic of Brushless Direct-Current Motor Drives. IEEE Trans. Ind. Electron. 2011, 58, 1586–1593. [Google Scholar] [CrossRef]
- Tefay, B.; Eizad, B.; Crosthwaite, P.; Singh, S.; Postula, A. Design of an integrated electronic speed controller for agile robotic vehicles. In Proceedings of the Australasian Conference on Robotics and Automation (ACRA 2011), Melbourne, Australia, 7–9 December 2011. [Google Scholar]
- Solomon, O. Model Reference Adaptive Control of a Permanent Magnet Brushless DC Motor for UAV Electric Propulsion System. In Proceedings of the IECON 33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 1186–1191. [Google Scholar]
- Koteich, M.; Moing, T.L.; Janot, A.; Defay, F. A real-time observer for UAV’s brushless motors. In Proceedings of the IEEE 11th International Workshop of Electronics, Control, Measurement, Signals and their application to Mechatronics, Toulouse, France, 24–26 June 2013; pp. 1–5. [Google Scholar]
- Baek, G.; Kim, Y.; Kim, S. Fault diagnosis of identical brushless DC motors under patterns of state change. In Proceedings of the IEEE International Conference on Fuzzy Systems (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; pp. 2083–2088. [Google Scholar]
- Hou, W.; Zhang, Y.; Sun, J. A fault detection method for motors based on Local Polynomial Fourier Transform. In Proceedings of the Prognostics and System Health Management Conference (PHM), Beijing, China, 21–23 October 2015; pp. 1–5. [Google Scholar]
- Bazeia, D.; Pereira, M.; Brito, A.; de Oliveira, B.; Ramos, J. A novel procedure for the identification of chaos in complex biological systems. Sci. Rep. 2017, 7, 44900. [Google Scholar] [CrossRef] [PubMed]
- Dietz, B.; Richter, A.; Samajdar, R. Cross-section fluctuations in open microwave billiards and quantum graphs: The counting-of-maxima method revisited. Phys. Rev. E 2015, 92, 22904. [Google Scholar] [CrossRef] [PubMed]
- Wei, W.W.S. Time Series Analysis: Univariate and Multivariate Methods; Pearson: London, UK, 2006. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | Unit |
|---|---|---|
| DC Voltage | 12 | V |
| Rated Speed | 930 | RPM |
| Poles | 12 | - |
| Scenario | Motor | Direction | Direction Status |
|---|---|---|---|
| S1 | 1 | counterclockwise | Right |
| S2 | 1 | clockwise | Wrong |
| S3 | 2 | counterclockwise | Right |
| S4 | 2 | clockwise | Wrong |
| E1 | E2 | E3 | E4 | ||||
|---|---|---|---|---|---|---|---|
| S1 | 2.136 | 2.080 | 2.076 | 2.096 | 2.097 | 0.0274 | |
| S2 | 2.413 | 2.452 | 2.306 | 2.312 | 2.371 | 0.0731 | |
| S3 | 1.988 | 2.033 | 2.040 | 2.083 | 2.036 | 0.0389 | |
| S4 | 2.125 | 2.106 | 2.093 | 2.121 | 2.111 | 0.0147 |
| E1 | E2 | E3 | E4 | ||||
|---|---|---|---|---|---|---|---|
| S1 | 2.168 | 2.180 | 2.177 | 2.184 | 2.177 | 0.0065 | |
| S2 | 2.502 | 2.499 | 2.502 | 2.521 | 2.506 | 0.0105 | |
| S3 | 2.079 | 2.098 | 2.089 | 2.089 | 2.089 | 0.0077 | |
| S4 | 2.189 | 2.186 | 2.187 | 2.190 | 2.188 | 0.0020 |
| Scenario | FFT | CLC | SAC-DM |
|---|---|---|---|
| (Si) | (Si/S2) | (S2/Si) | (S2/Si) |
| S1 | 1.1468 | 1.1466 | 1.1529 |
| S2 | 1 | 1 | 1 |
| S3 | 1.1908 | 1.1702 | 1.2018 |
| S4 | 1.1440 | 1.1309 | 1.1473 |
| Mode | ||||
|---|---|---|---|---|
| S1 | 2.1645 | 2.1772 | 0.0173 | |
| S2 | 2.5253 | 2.5089 | 0.0257 | |
| S3 | 2.0833 | 2.0887 | 0.0192 | |
| S4 | 2.1930 | 2.1875 | 0.0184 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
V. Medeiros, R.L.; G. S. Ramos, J.G.; Nascimento, T.P.; C. Lima Filho, A.; Brito, A.V. A Novel Approach for Brushless DC Motors Characterization in Drones Based on Chaos. Drones 2018, 2, 14. https://doi.org/10.3390/drones2020014
V. Medeiros RL, G. S. Ramos JG, Nascimento TP, C. Lima Filho A, Brito AV. A Novel Approach for Brushless DC Motors Characterization in Drones Based on Chaos. Drones. 2018; 2(2):14. https://doi.org/10.3390/drones2020014
Chicago/Turabian StyleV. Medeiros, Ramon L., Jorge Gabriel G. S. Ramos, Tiago P. Nascimento, Abel C. Lima Filho, and Alisson V. Brito. 2018. "A Novel Approach for Brushless DC Motors Characterization in Drones Based on Chaos" Drones 2, no. 2: 14. https://doi.org/10.3390/drones2020014
APA StyleV. Medeiros, R. L., G. S. Ramos, J. G., Nascimento, T. P., C. Lima Filho, A., & Brito, A. V. (2018). A Novel Approach for Brushless DC Motors Characterization in Drones Based on Chaos. Drones, 2(2), 14. https://doi.org/10.3390/drones2020014