1. Introduction
Despite the breakthroughs in the locomotion of robots on the macroscale, there is not a counterpart on the miniature scale. A recent review [
1] pointed out the limitations of sub-gram systems. Locomotion based on legs is already well established for robotic platforms and might be a solution for miniaturization. Assuming a back-and-forth motion of the legs, a net displacement can be attained when the forward slip is not equal to the backward slip.
The motion of the legs can be induced by the generation of waves on the platform where the legs are attached. Waves might be either standing waves (SW) or travelling waves (TW). The combination of straight legs and SW was reported for the movement of sliders [
1] or the locomotion of a platform [
2]. Recent publications also demonstrated the use of TW and straight legs for conveyance applications [
3], as well as robotic locomotion [
4].
The use of inclined legs is also a common way of achieving an asymmetric slip. Numerous publications implemented this approach [
5,
6,
7]. In most of these publications, a vertical displacement of the robot platform was required to induce the asymmetry and achieve a net horizontal motion.
Here, we also propose the use of inclined legs, but with a horizontal displacement of the platform. For that, an SW approach is selected: the generation of the first extensional mode of vibration of a free rectangular platform. The material of the platform is piezoelectric polyvinylidene fluoride (PVDF). This polymer allows for actuation, as well as for a low-cost, light-weight approach in the quest of miniaturization. Preliminary results demonstrated a locomotion speed of 42 mm/s for a 15.8 mg PVDF/legs combination.
2. Device Design
The core of our design relies on how to combine the extensional mode of vibration of the platform and the inclined legs.
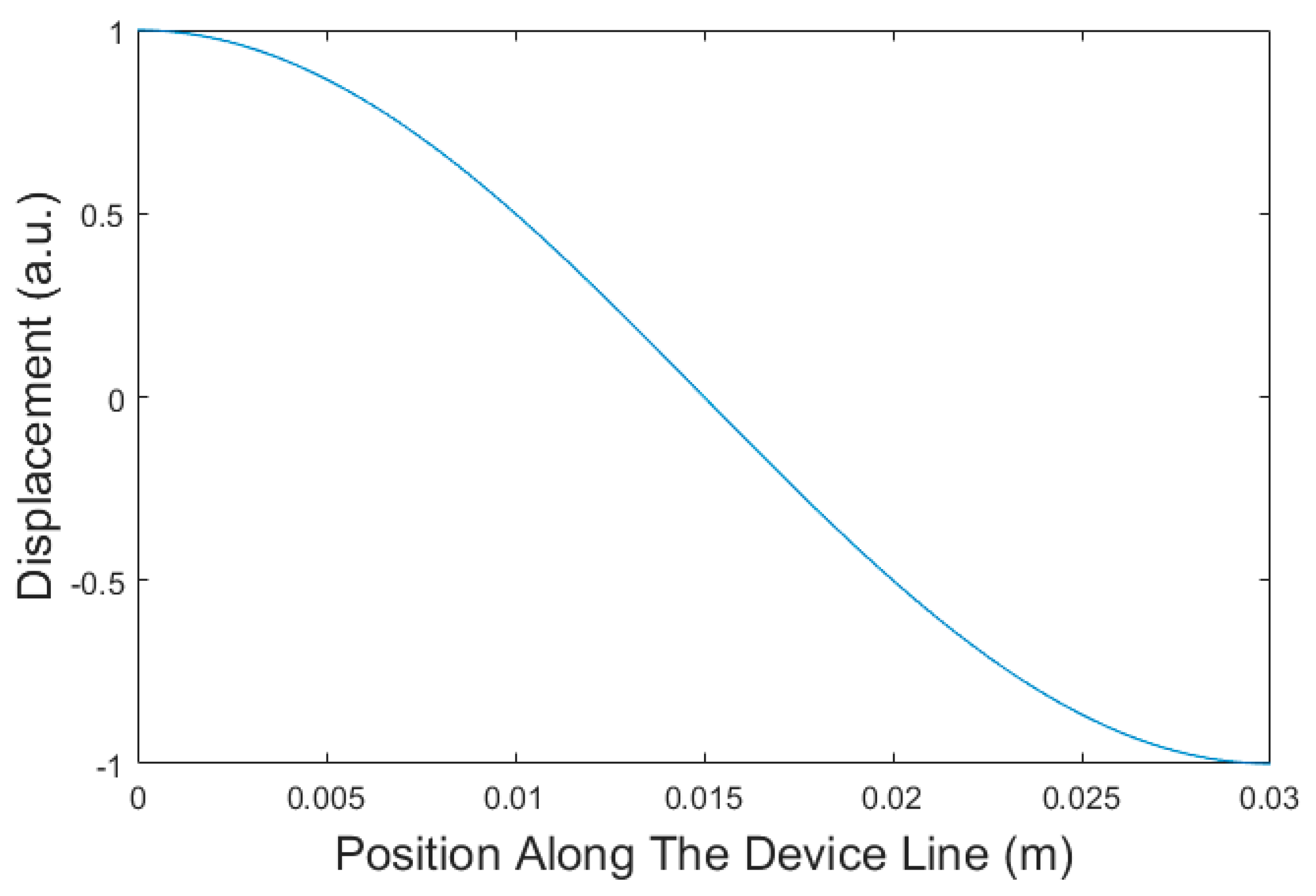
The modal shape of this mode is calculated using Equation (1), where
l is the maximum displacement,
x is the position along the sample with
x = 0 at one of the edges of the sample and
L is the length of the sample. As can be seen in
Figure 1, each side stretches in one direction, reaching its maximum at the edges. Therefore, the legs will be located as close to the edges as possible.
Figure 2 shows the PVDF platform together with the legs. Both the orientation and the location of the legs are important parameters to consider. With the orientation of the figure, the inclined legs show a higher friction when moving to the left than to the right [
8]. Besides, due to their location, each leg moves in an opposing direction, which results in a net movement of the platform to the right.
The frequency of vibration of the extensional mode was obtained by Equation (2) for a free-free beam, as indicated by reference [
9].
where
is the density of the material and
E is Young’s module of the beam.
3. Materials and Methods
The platform of the robot was a 30-µm-thick uniaxially oriented piezoelectric PVDF layer, metalized on both sides with Cu/Ni, commercially available from Goodfellow. A die cut machine (Silver Bullet) was used to define the size of the robot: 30 mm long and 5 mm wide. With these dimensions, the theoretical frequency of the extensional mode was 17.7 kHz, according to Equation (2).
Table 1 shows the PVDF properties used for the calculation.
Figure 3 shows a picture of the fabricated U-shaped legs. A stereolithography (SLA) 3D printer (B9 Core 530) was used for the fabrication. The material was nylon resin. The length and the angle of inclination of the legs were varied; 1-mm- and 2-mm-long legs were fabricated, at two different angles of inclination to the PVDF platform, 45° and 60°. The legs were attached to the platform by means of epoxy resin, an elastic adhesive that prevented stiffening the joint. For electrical access to the metallizations of the PVDF layer, 25-µm-thick aluminium wire was used, to minimize loading effects. The connection between the aluminium wire and the PVDF metallizations was made by electric paint (Bare Conductive), coated with a layer of silver paint to improve conductance.
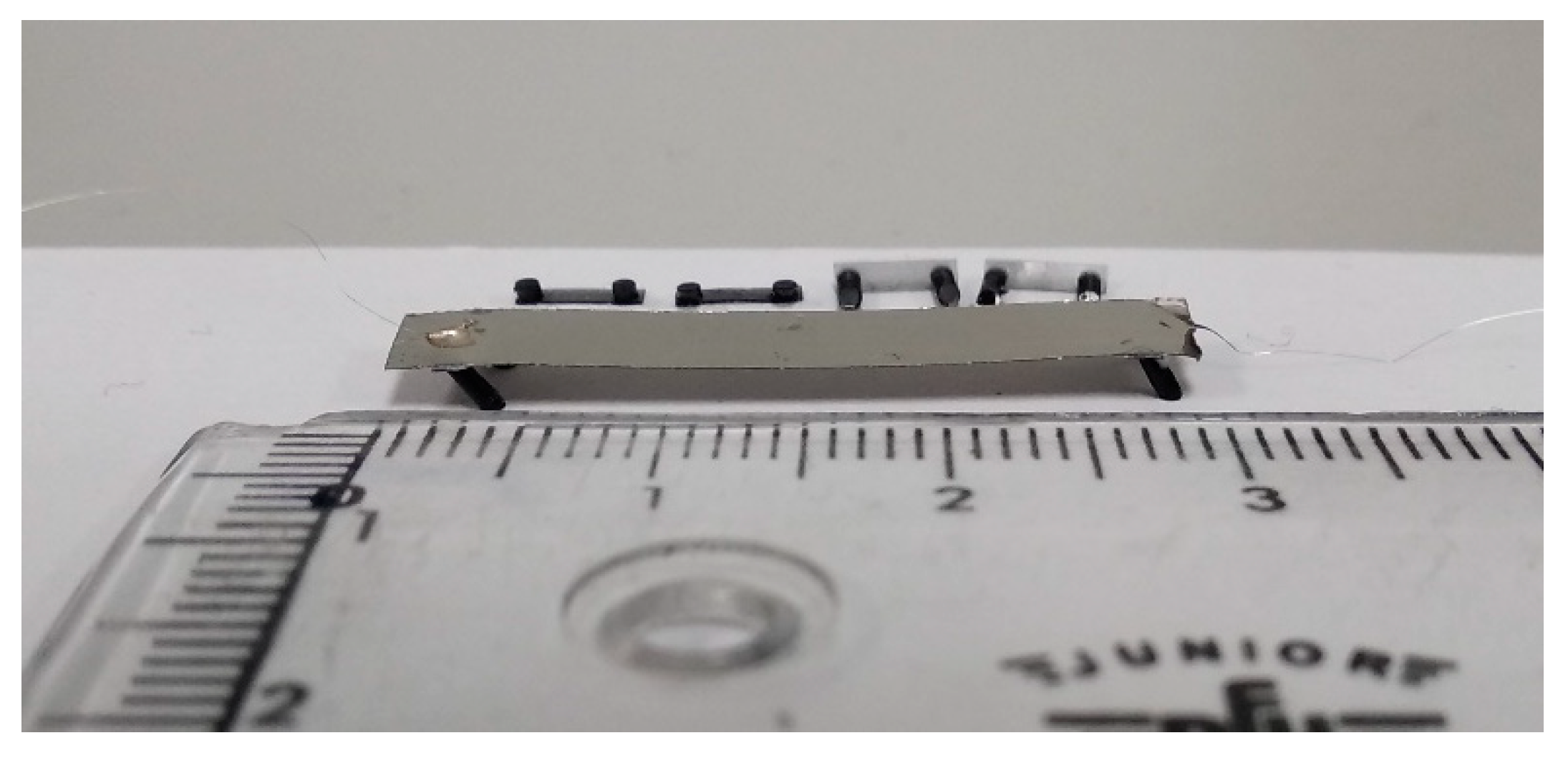
Figure 4 shows a picture of the whole system, PVDF plus legs and electrical connections.
The presence of the extensional mode was detected with the help of an impedance analyzer (4294A Agilent). Additionally, for the speed characterization of the robot, a set-up was mounted with two infrared LEDs, separated 10 cm and connected to a frequency counter to detect the pass of the robot.
4. Results
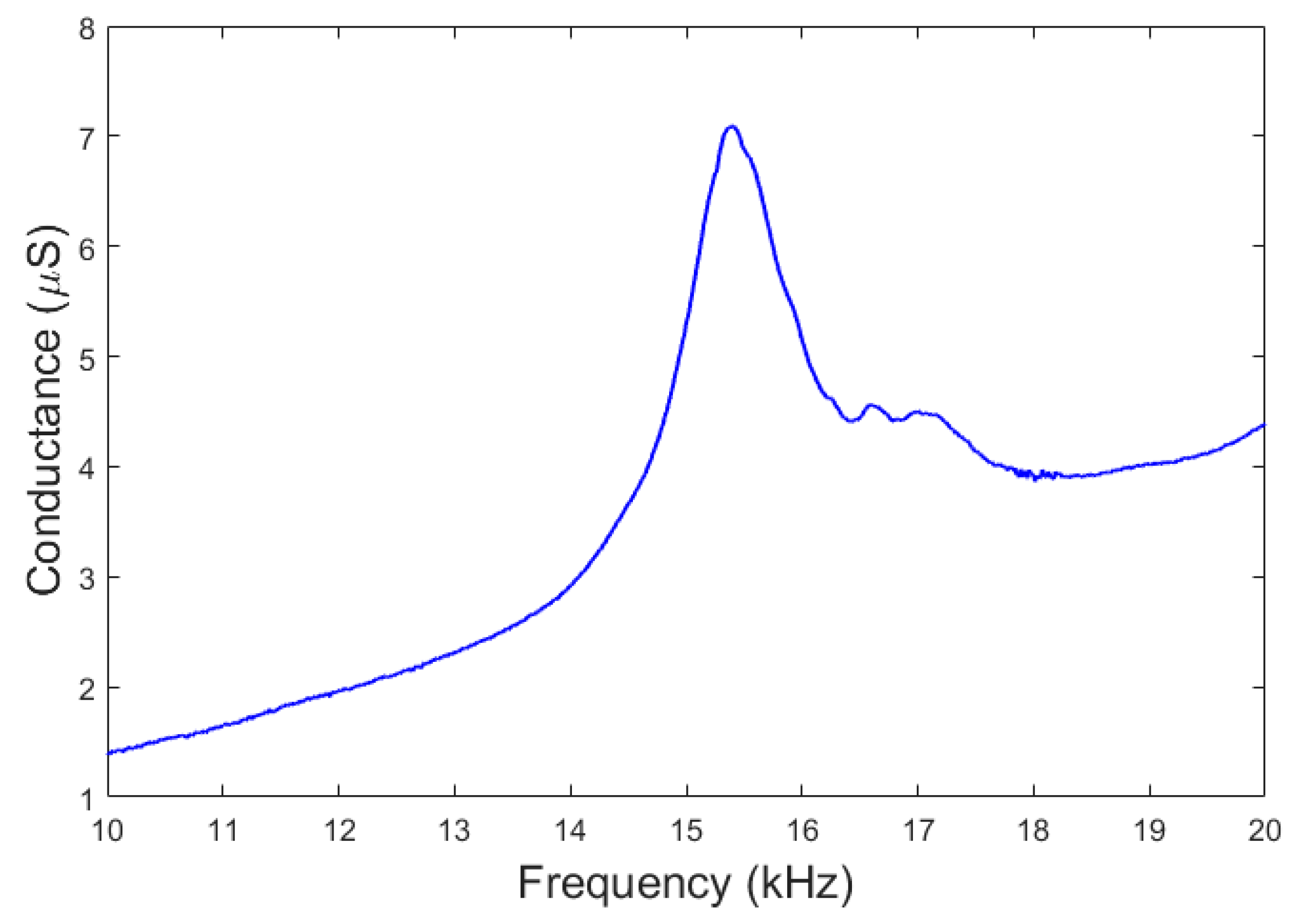
Figure 5 shows the electrical conductance of a sample with 2-mm-long legs at an angle of 45°. The maximum response corresponding to the extensional mode was located at about 15.5 kHz. This would be the frequency of actuation of the robot. For all the samples under study, the frequency of the maximum conductance of the extensional mode was in the range between 15 and 17 kHz. The difference between the theoretical frequency and the measurements might be related to the mass added by the legs and manufacturing defects.
Figure 6 shows the speed of the different samples versus applied voltage. No results were obtained for the robot with 1-mm-long legs at an angle of 45°, mainly due to contact problems between the legs and the floor. A speed as high as 40 mm/s was obtained for a voltage of 25 V.
5. Conclusions
This work demonstrates the achievement of locomotion by the combination of an extensional mode of vibration and inclined legs. The use of flexible materials resulted in a sub-gram system with a speed of about 1 BL/s (body-lengths per second) at a voltage of 25 V.
Author Contributions
J.H.-G. and J.L.S.-R. conceived and designed the experiments; D.R-C. and V.R.-D. performed the experiments and analyzed the data; D.R.-C. and J.H.-G. wrote the paper. All authors have read and agreed to the published version of the manuscript.
Acknowledgments
This work was supported by the European Regional Development Fund, the Spanish Ministerio de Ciencia, Innovación y Tecnología project (RTI2018-094960-B-100), and the regional government (JCCLM) project (SBPLY/17/180501/000139).
Conflicts of Interest
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| PVDF | Polyvinylidene fluoride |
| SLA | Stereolithography |
| SW | Standing waves |
| TW | Travelling waves |
References
- He, S.; Chen, W.; Tao, X.; Chen, Z. Standing wave bi-directional linearly moving ultrasonic motor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 1133–1139. [Google Scholar] [CrossRef] [PubMed]
- Son, K.J.; Kartik, V.; Wickert, J.A.; Sitti, M. An Ultrasonic Standing-wave-actuated Nano-positioning Walking Robot: Piezoelectric-metal Composite Beam Modeling. J. Vib. Control 2016. [Google Scholar] [CrossRef]
- Ruiz-Díez, V.; Hernando-García, J.; Toledo, J.; Ababneh, A.; Seidel, H.; Sánchez-Rojas, J.L. Bidirectional Linear Motion by Travelling Waves on Legged Piezoelectric Microfabricated Plates. Micromachines 2020, 11, 517. [Google Scholar] [CrossRef] [PubMed]
- Hernando-García, J.; García-Caraballo, J.L.; Ruiz-Díez, V.; Sánchez-Rojas, J.L. Motion of a Legged Bidirectional Miniature Piezoelectric Robot Based on Traveling Wave Generation. Micromachines 2020, 11, 321. [Google Scholar] [CrossRef] [PubMed]
- Aoshima, S.; Tsujimura, T.; Yabuta, T. A Miniature Mobile Robot Using Piezo Vibration for Mobility in a Thin Tube. J. Dyn. Syst. Meas. Control 1993, 115, 270–278. [Google Scholar] [CrossRef]
- Giomi, L.; Hawley-Weld, N.; Mahadevan, L. Swarming, swirling and stasis in sequestered bristle-bots. Proc. R. Soc. Math. Phys. Eng. Sci. 2013, 469, 20120637. [Google Scholar] [CrossRef]
- Shen, Z.; Liu, Y.; Zhao, J.; Tang, X.; Chen, W. Design and Experiment of a Small Legged Robot Operated by the Resonant Vibrations of Cantilever Beams. IEEE Access 2017, 5, 8451–8458. [Google Scholar] [CrossRef]
- Becker, F.; Börner, S.; Lysenko, V.; Zeidis, I.; Zimmermann, K. On the Mechanics of Bristle-Bots—Modeling, Simulation and Ex- periments. In Proceedings of the ISR/Robotik 2014: 41st International Symposium on Robotics, Munich, Germany, 2–3 June 2014. [Google Scholar]
- Blevins, R.D. Formulas for Natural Frequency and Mode Shape; Krieger Publishing Company: Malabar, FL, USA, 1979; p. 429. ISBN 978-1-57524-184-5. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}