Open-Loop Control Design of Shape Memory Alloys and Polymers through Tapping Motion †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
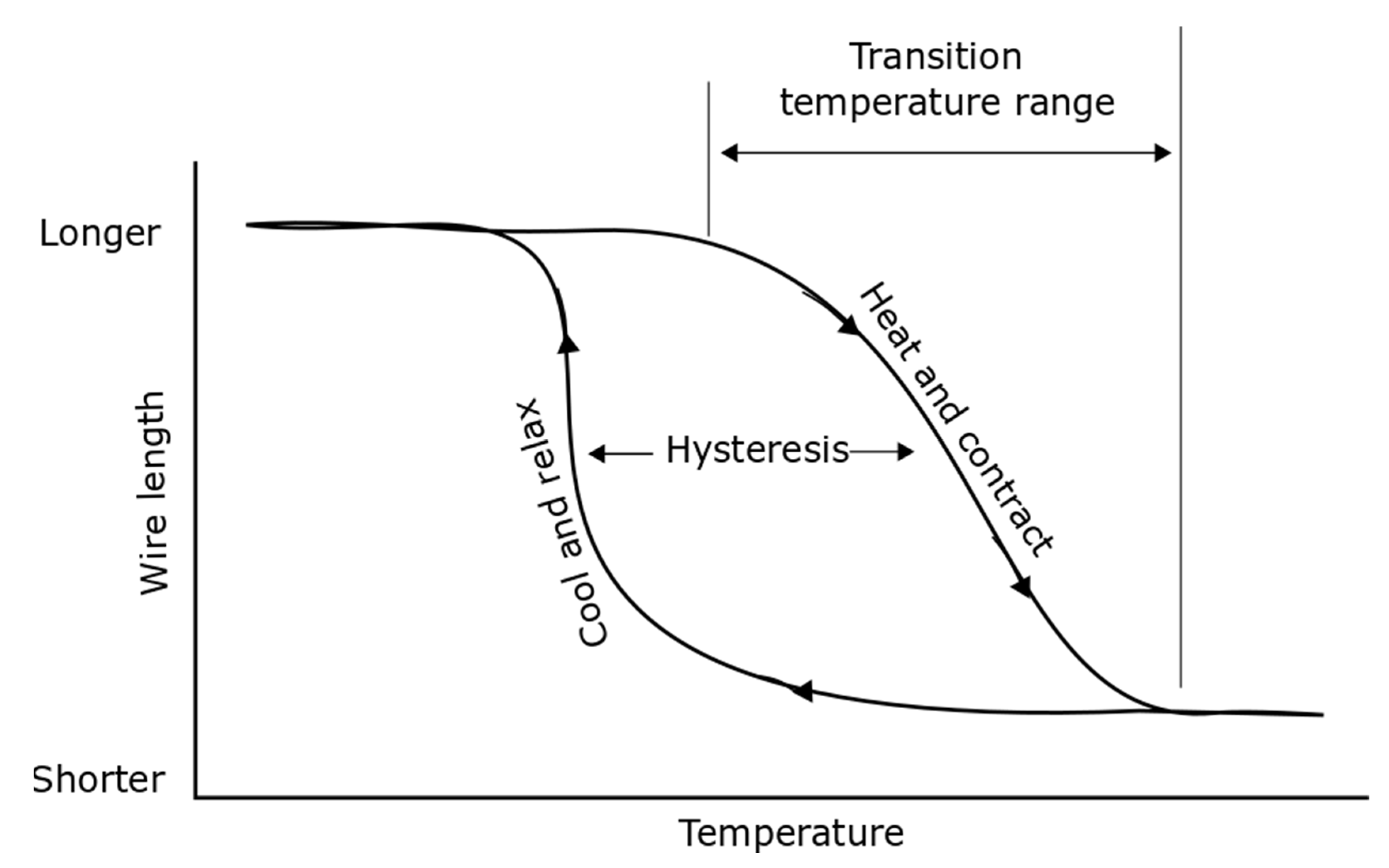
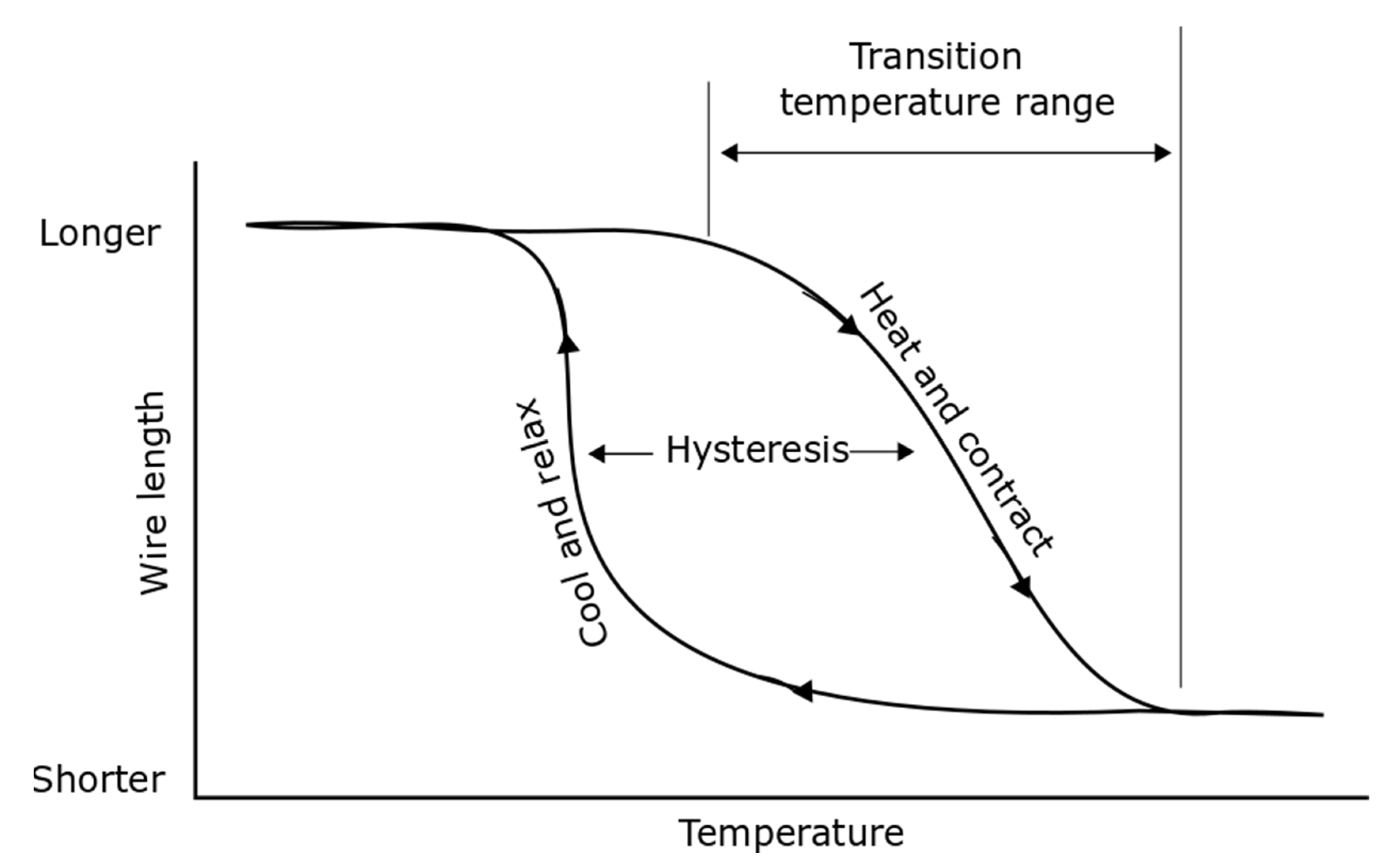
- Low temperature state in which the material has a martensite crystal structure (“relaxed”, extended condition).
- High temperature state in which the material has an austenite crystal structure (“remembered”, shortened condition).
2. Experiments
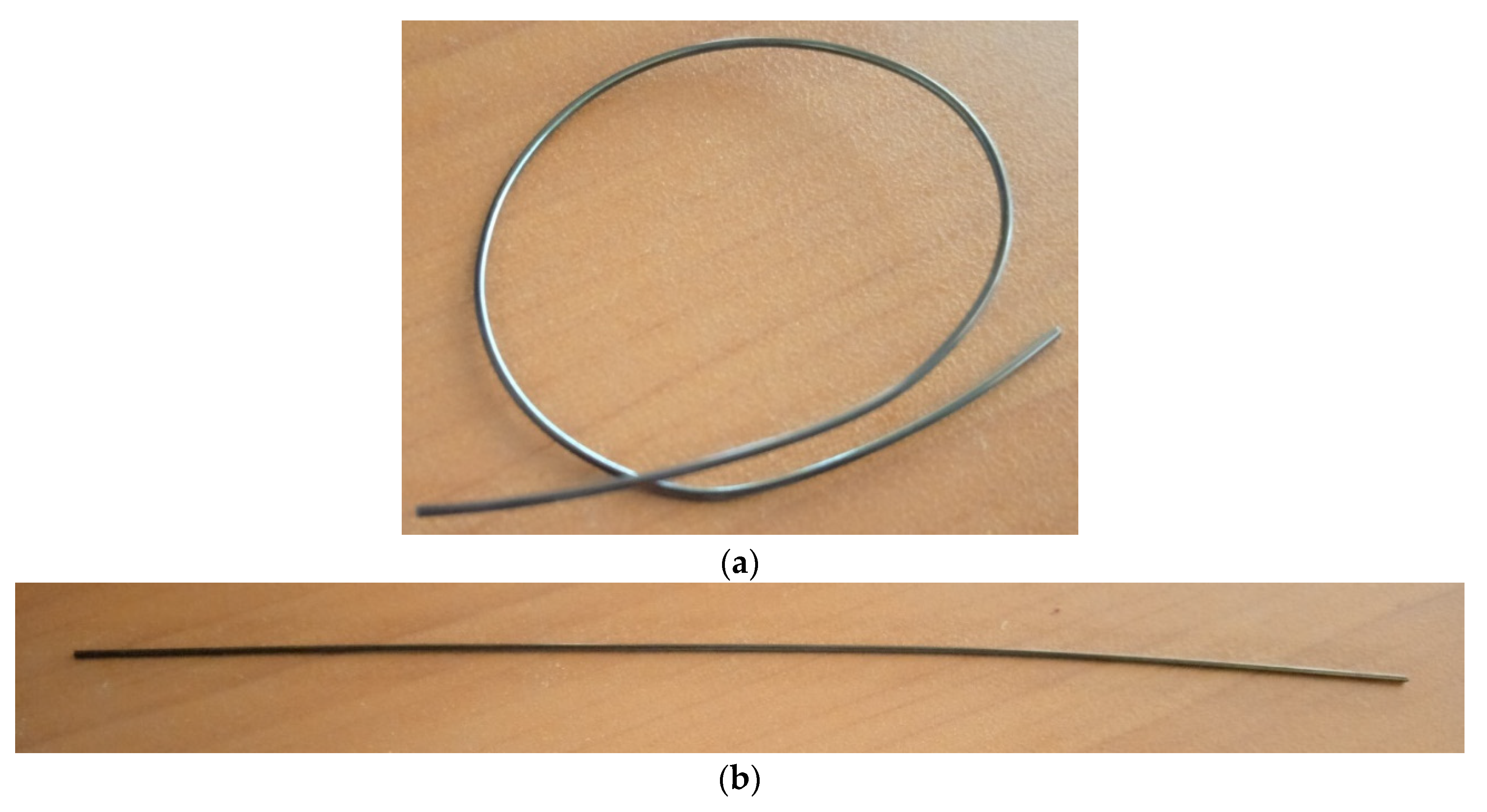
2.1. Shape Memory Wires
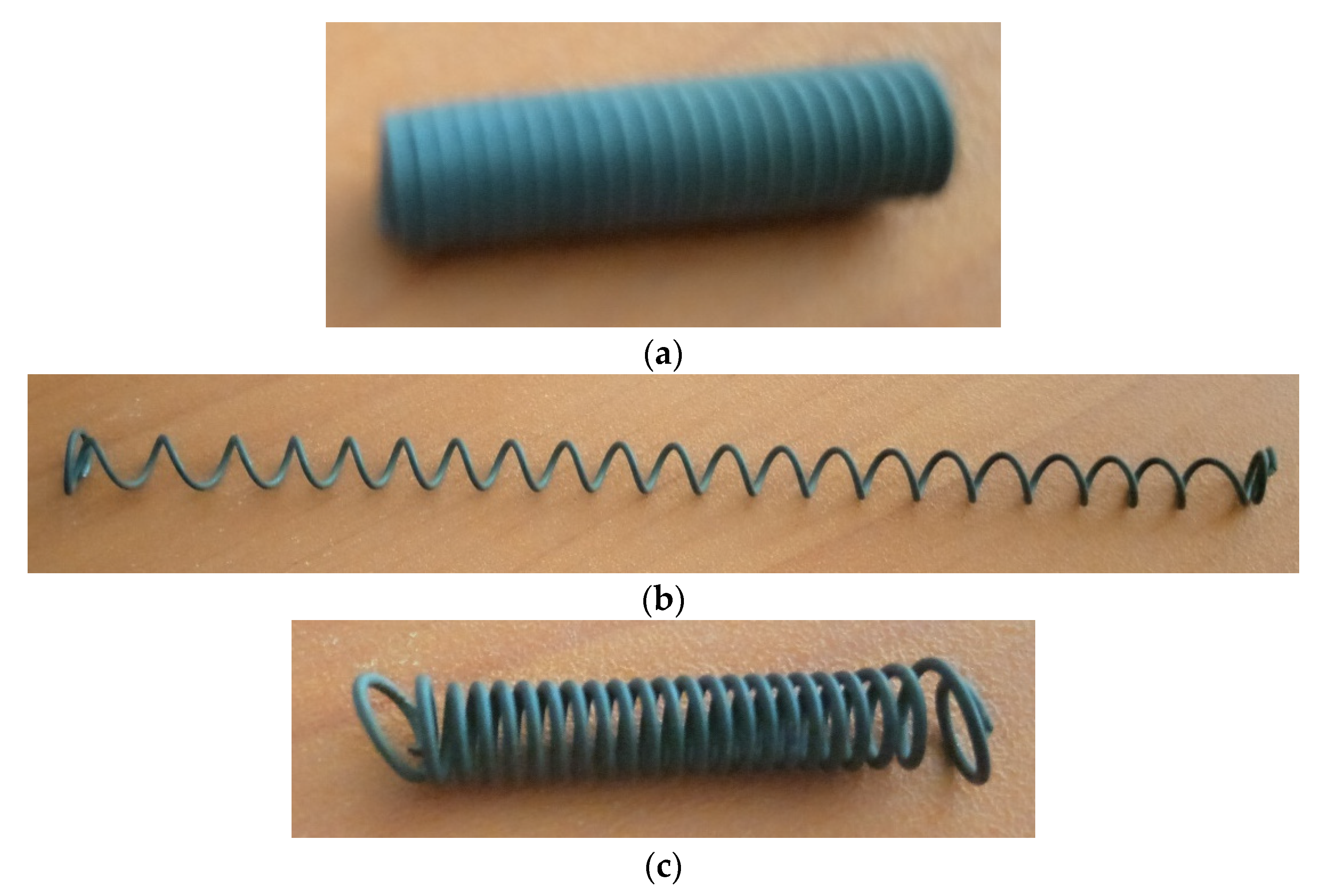
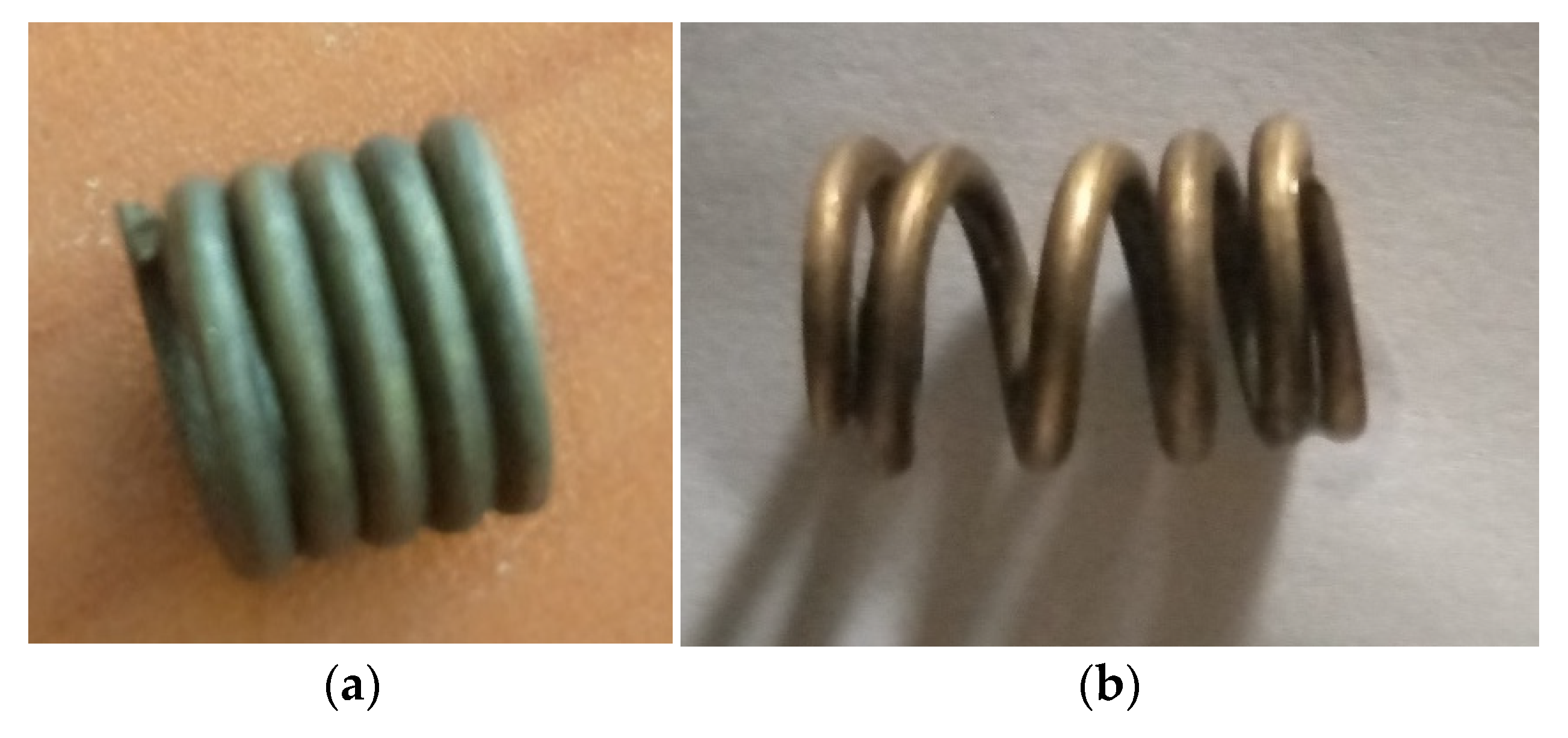
2.2. Shape Memory Springs
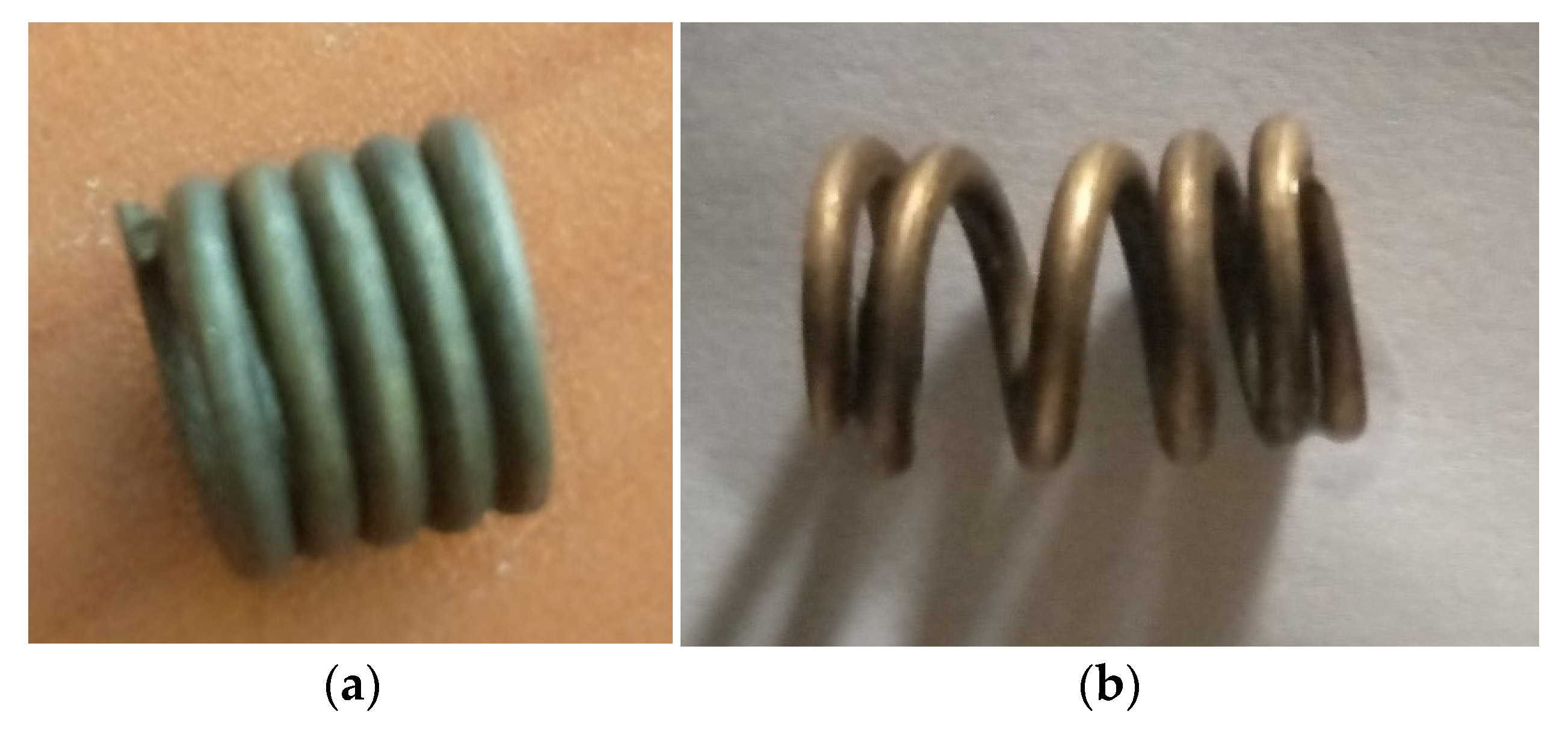
2.3. Two-Way Shape Memory Alloy
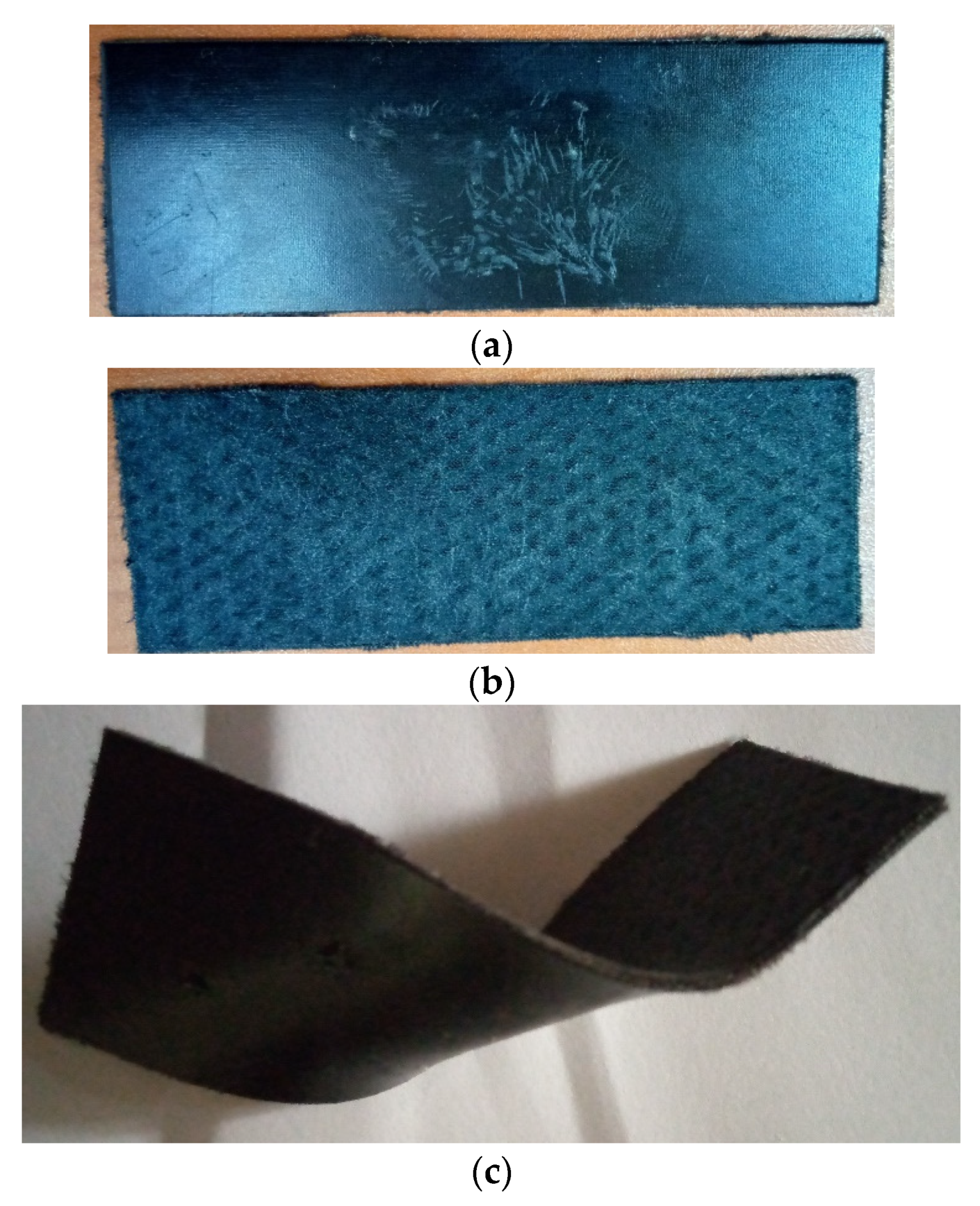
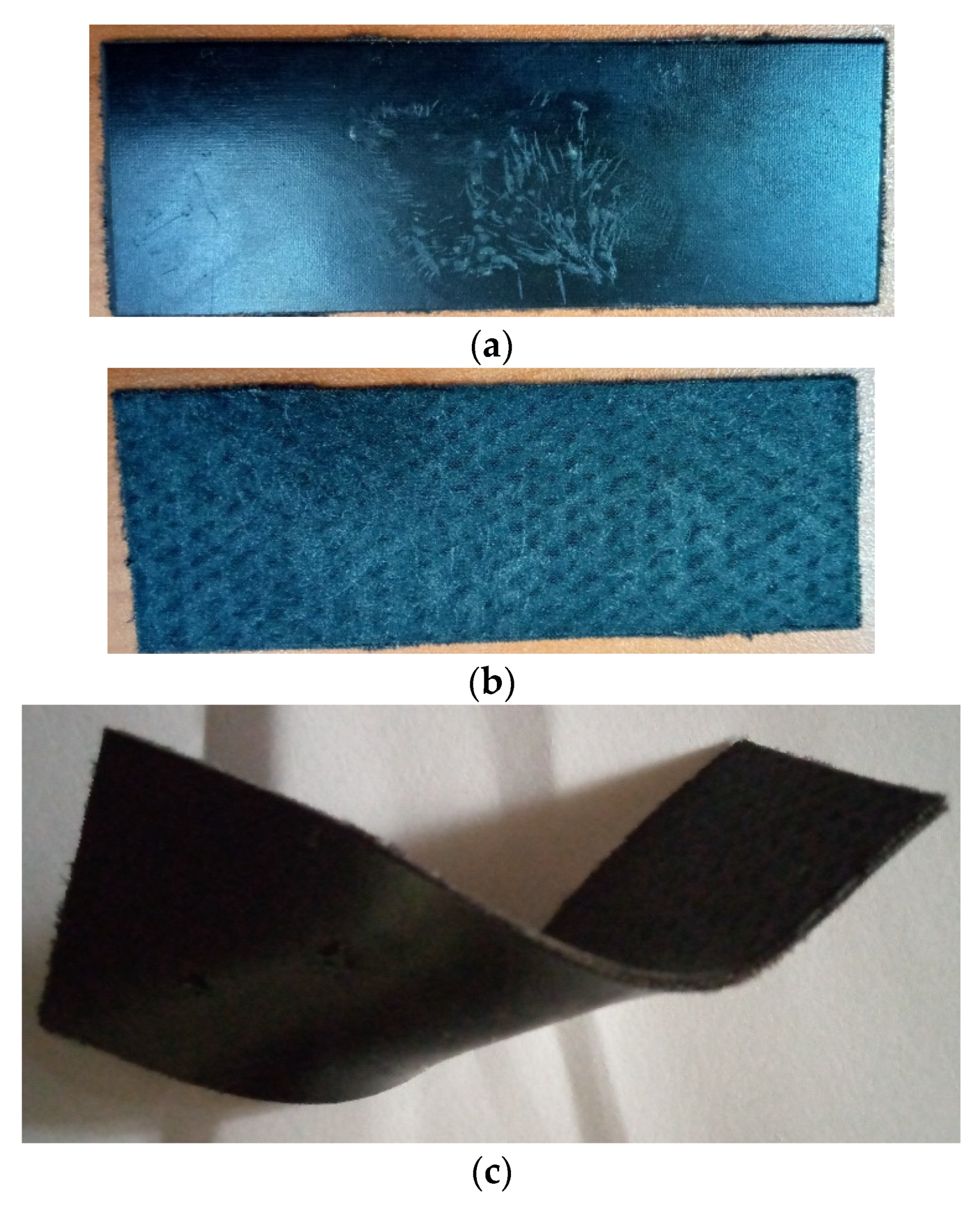
2.4. Shape Memory Polymer (SMP)
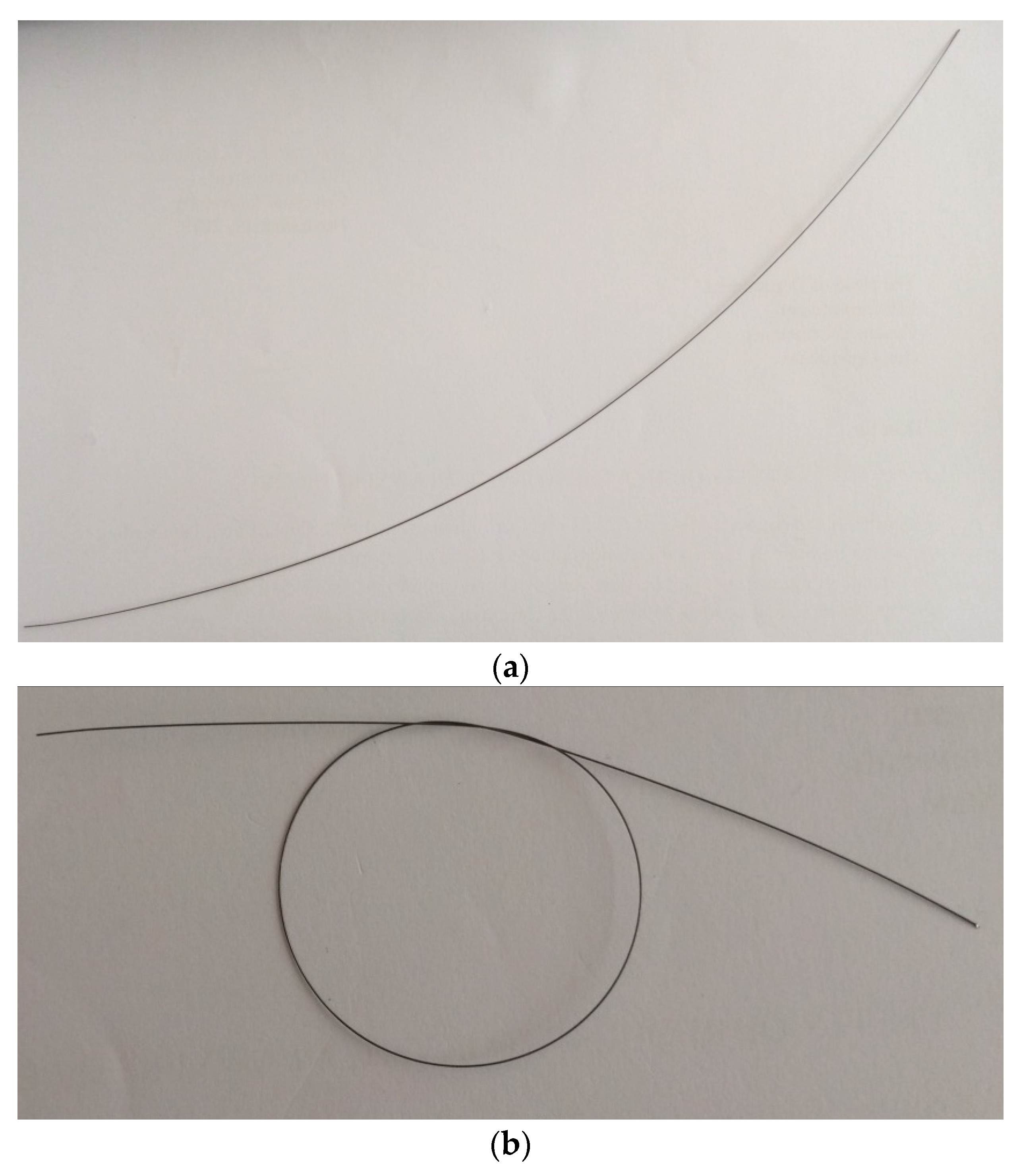
2.5. Superelastic Alloys
3. Results
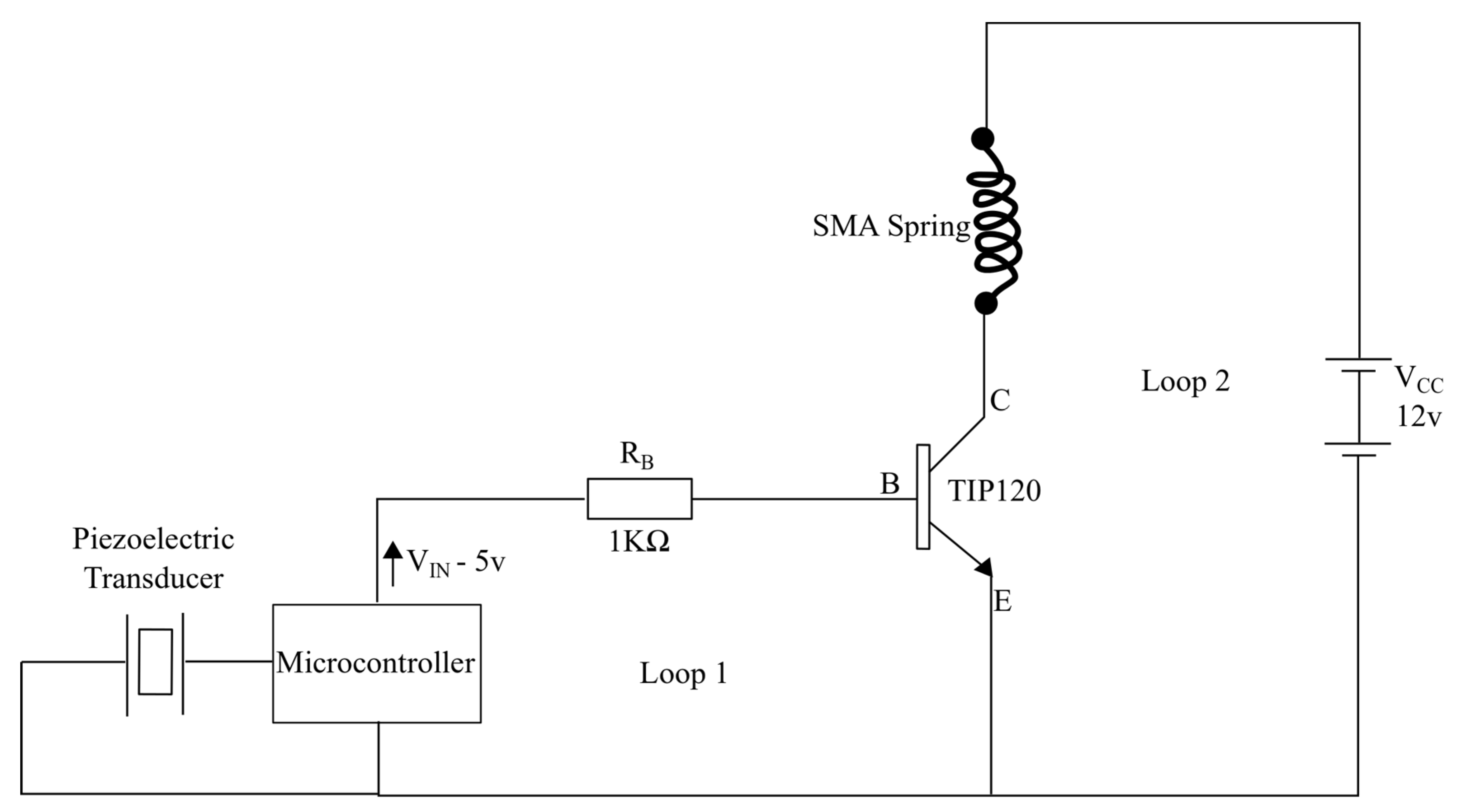
3.1. Open-Loop Nitinol Wire Control Circuit
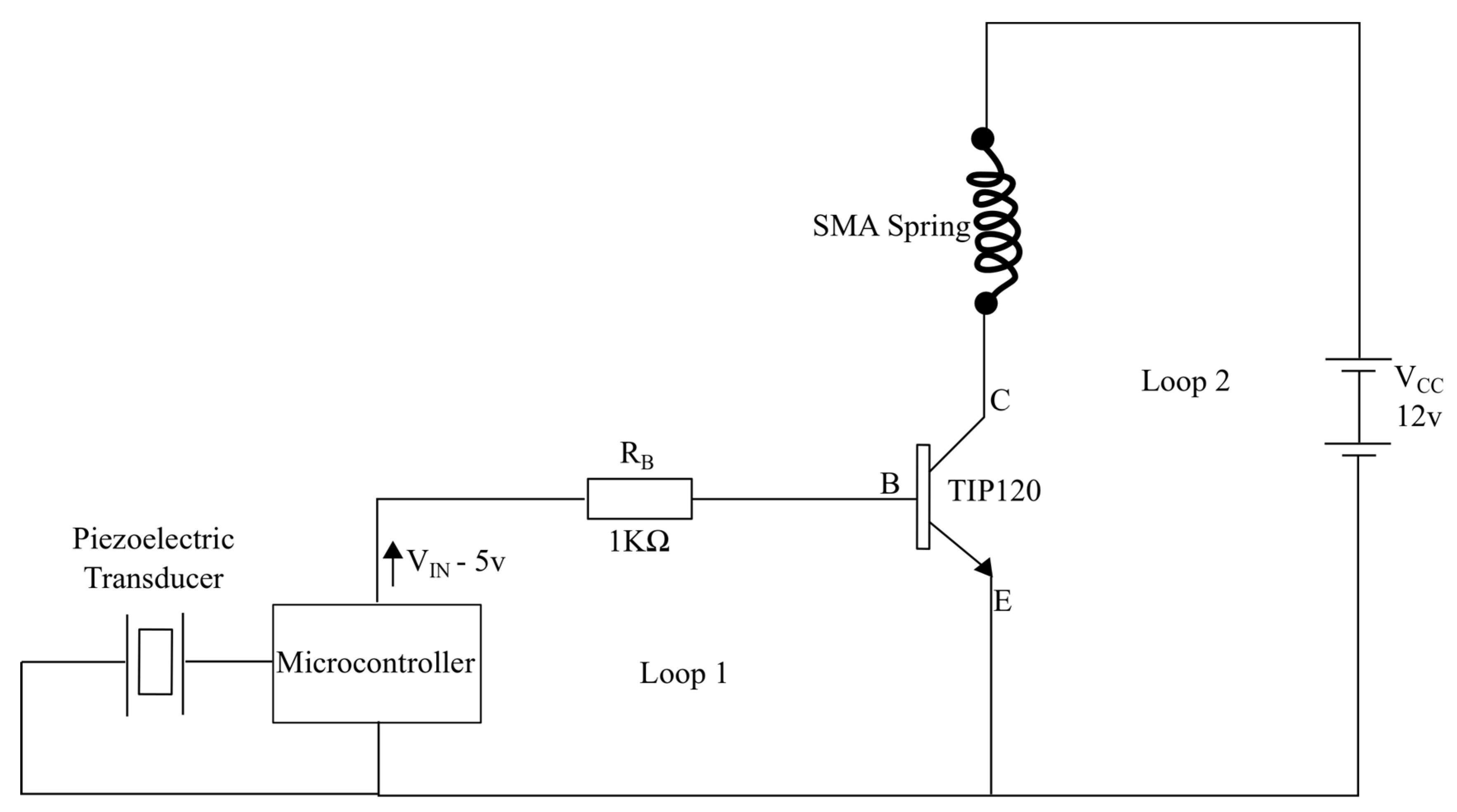
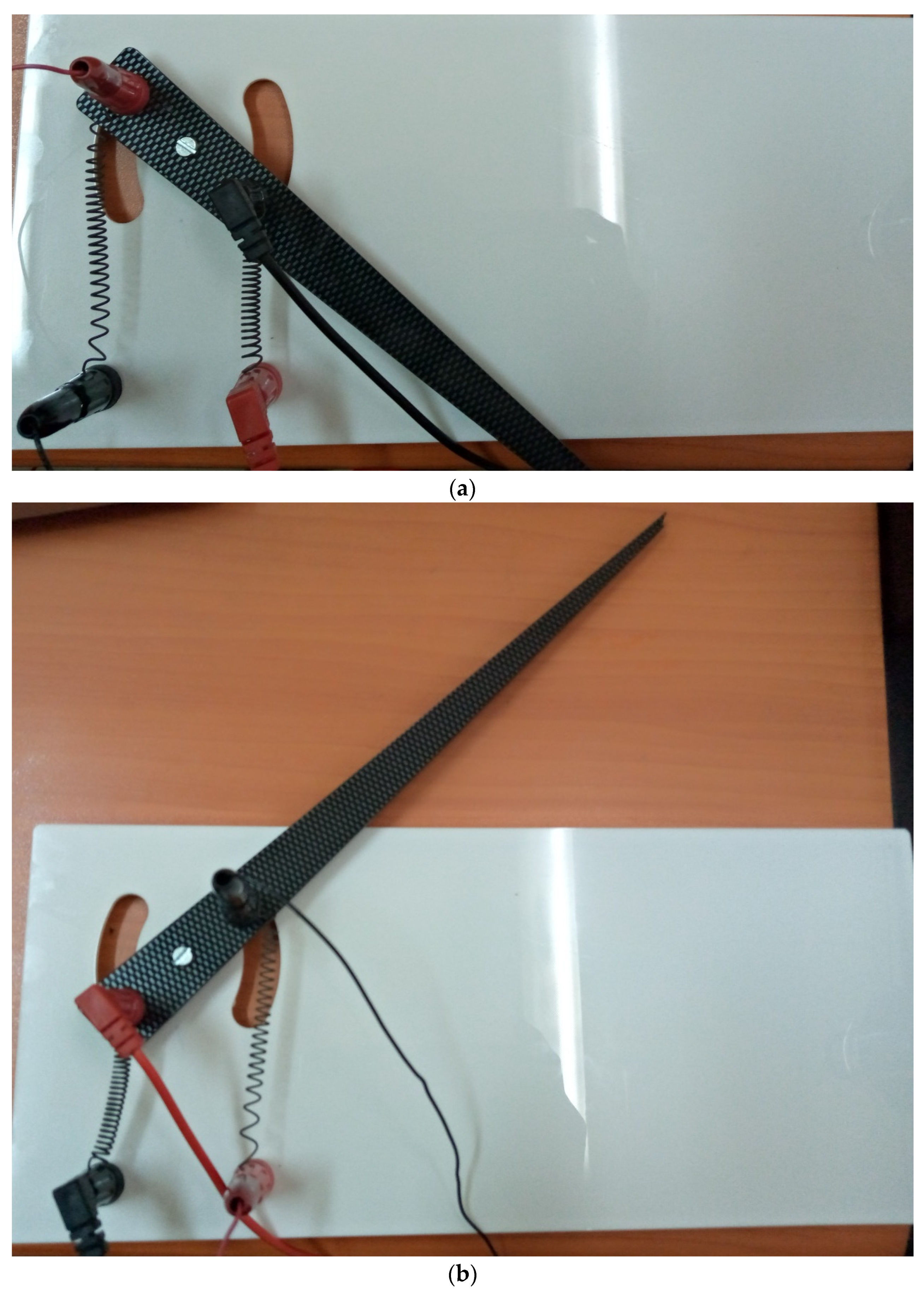
3.2. Electrical Actuation of a Model Robotic Arm with Shape Memory Springs
4. Discussion
5. Conclusions
Conflicts of Interest
References
- Andreasen, G.F.; Morrow, R.E. Laboratory and clinical analyses of nitinol wire. Am. J. Orthod. 1978, 73, 142–151. [Google Scholar] [CrossRef]
- Otsuka, K.; Wayman, C.M. (Eds.) Shape Memory Materials; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Xie, T. Tunable polymer multi-shape memory effect. Nature 2010, 464, 267–270. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, K.; Kobayashi, S.; Sato, Y. Thermomechanics of transformation pseudoelasticity and shape memory effect in alloys. Int. J. Plast. 1986, 2, 59–72. [Google Scholar] [CrossRef]
- Sato, A.; Chishima, E.; Soma, K.; Mori, T. Shape memory effect in γ⇄ ϵ transformation in Fe-30Mn-1Si alloy single crystals. Acta Metall. 1982, 30, 1177–1183. [Google Scholar] [CrossRef]
- Jang, J.H.; Koh, C.Y.; Bertoldi, K.; Boyce, M.C.; Thomas, E.L. Combining pattern instability and shape-memory hysteresis for phononic switching. Nano Lett. 2009, 9, 2113–2119. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Liu, Y.; Van Humbeeck, J. Two-way shape memory effect developed by martensite deformation in NiTi. Acta Mater. 1998, 47, 199–209. [Google Scholar] [CrossRef]
- McClung, A.J.; Tandon, G.P.; Baur, J.W. Strain rate-and temperature-dependent tensile properties of an epoxy-based, thermosetting, shape memory polymer (Veriflex-E). Mech. Time-Depend. Mater. 2012, 16, 205–221. [Google Scholar] [CrossRef]
- Havens, E.; Snyder, E.A.; Tong, T.H. Light-activated shape memory polymers and associated applications. In Smart Structures and Materials 2005: Industrial and Commercial Applications of Smart Structures Technologies; International Society for Optics and Photonics: The Hague, The Netherlands, 2005; Volume 5762, pp. 48–55. [Google Scholar]
- DesRoches, R.; McCormick, J.; Delemont, M. Cyclic properties of superelastic shape memory alloy wires and bars. J. Struct. Eng. 2004, 130, 38–46. [Google Scholar] [CrossRef]
- Brailovski, V.; Trochu, F. Review of shape memory alloys medical applications in Russia. Bio-Med Mater. Eng. 1996, 6, 291–298. [Google Scholar] [CrossRef]
- Machado, L.G.; Savi, M.A. Medical applications of shape memory alloys. Braz. J. Med. Biol. Res. 2003, 36, 683–691. [Google Scholar] [CrossRef] [PubMed]
- Cragg, A.; Lund, G.; Rysavy, J.; Castaneda, F.; Castaneda-Zuniga, W.; Amplatz, K. Nonsurgical placement of arterial endoprostheses: A new technique using nitinol wire. Radiology 1983, 147, 261–263. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Liu, Y. Effect of annealing on the transformation behavior and superelasticity of NiTi shape memory alloy. Scr. Mater. 2001, 45, 153–160. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oguntosin, V. Open-Loop Control Design of Shape Memory Alloys and Polymers through Tapping Motion. Proceedings 2020, 64, 3. https://doi.org/10.3390/IeCAT2020-08512
Oguntosin V. Open-Loop Control Design of Shape Memory Alloys and Polymers through Tapping Motion. Proceedings. 2020; 64(1):3. https://doi.org/10.3390/IeCAT2020-08512
Chicago/Turabian StyleOguntosin, Victoria. 2020. "Open-Loop Control Design of Shape Memory Alloys and Polymers through Tapping Motion" Proceedings 64, no. 1: 3. https://doi.org/10.3390/IeCAT2020-08512
APA StyleOguntosin, V. (2020). Open-Loop Control Design of Shape Memory Alloys and Polymers through Tapping Motion. Proceedings, 64(1), 3. https://doi.org/10.3390/IeCAT2020-08512