1. Introduction
The electro-hydraulic servo system can be roughly divided into two categories: valve-controlled system and pump-controlled system. The valve-controlled system has the characteristics of a fast dynamic response and high control accuracy, but it has disadvantages, such as significant throttling loss, low system efficiency, and severe heating. Compared with the valve-controlled system, the pump-controlled system basically eliminates the throttling loss. Hence, it significantly improves system efficiency and has the characteristics of compactness and high system integration [
1,
2]. In recent years, machines have to be energy-efficient due to limited and high-priced energy resources together with the increasing sensitivity of environmental issues [
3,
4]. Hence, pump-controlled system techniques have become the centre of focus [
5,
6].
However, in the pump-controlled differential cylinder system, unbalanced flow is caused by the unequal effective cross-section area of the two chambers. Much research has been carried out on this, such as using a pilot-operated check valve or solenoid-operated reversing valve [
7,
8], developing an asymmetric flow distribution pump [
9], and proposing a double-pump or multi-pump compensation circuit [
10,
11,
12] to solve the flow imbalance problem. Among them, the double-pump direct-driven hydraulic (DDH) system can better improve the dynamic performance and stability of the system. Then, when addressing the problem of flow imbalance, the time-varying and nonlinearity of the pump-controlled system also need to be solved. Hence, many control methods were proposed, such as adaptive fuzzy control [
13], control based on disturbance observer [
14,
15], adaptive backstepping control or iterative backstepping control [
16,
17,
18].
As discussed above, the DDH can effectively solve the problem of flow mismatch, but control performance of the system is affected by parameter uncertainty. Therefore, this paper proposed a control method, adopting active disturbance rejection control (ADRC) for DDH. Firstly,
Section 2 introduces the principle of the DDH, establishes the mathematical model of a micro-crane and derives the system state-space equation. Then,
Section 3 gives the design procedure of the proposed ADRC controller based on the system state-space.
Section 4 performs simulation and compares the tracking performance of the ADRC controller with the Proportional–Integral–Differential (PID) controller. Finally,
Section 5 draws some conclusions.
2. Modelling
2.1. Working Principle of DDH
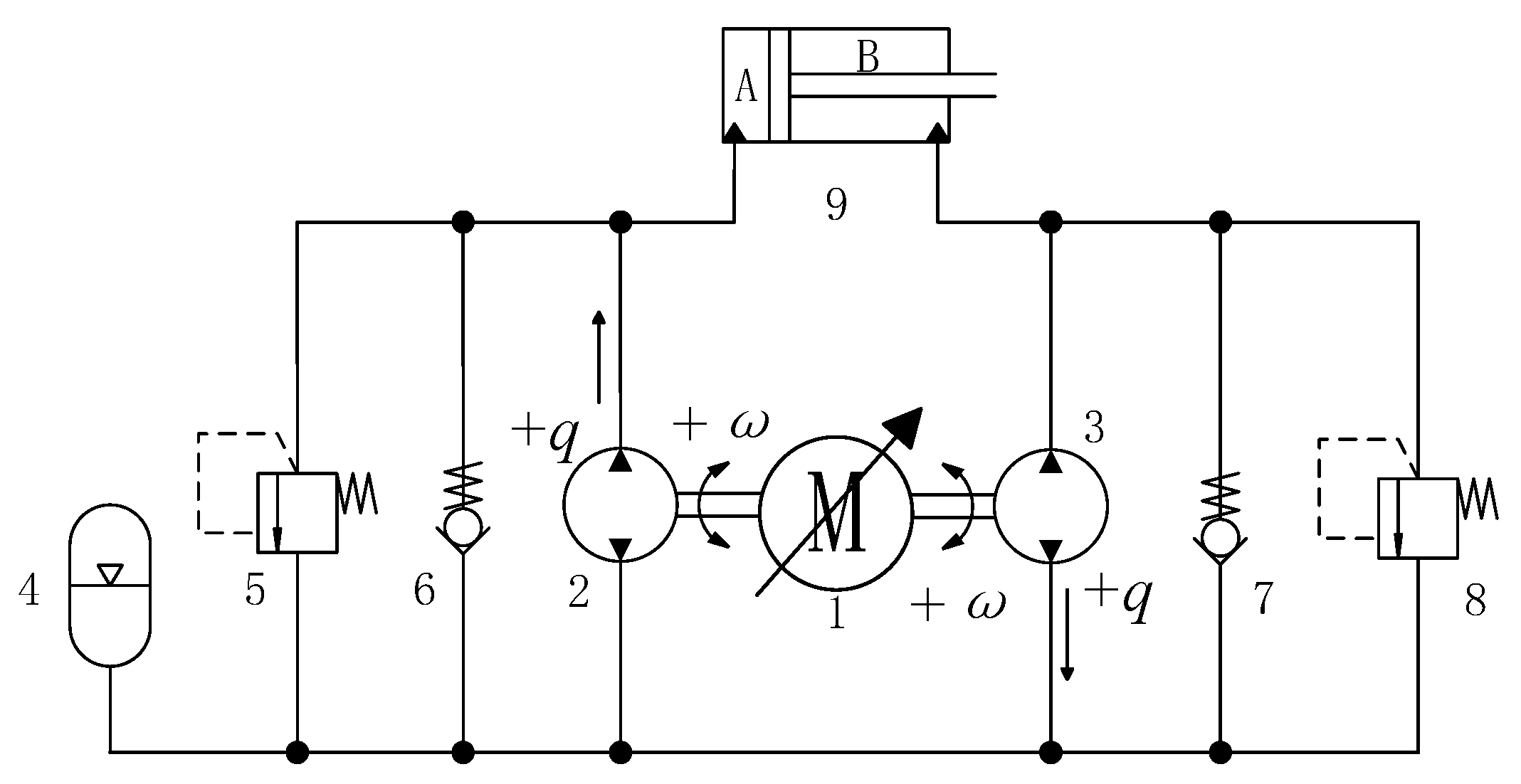
The DDH is mainly composed of a permanent magnet synchronous motor, two bi-directional pumps, a hydraulic accumulator, two check valves, and two pressure relief valves, as shown in
Figure 1 and
Table 1. The two pumps are driven by a permanent magnet synchronous motor, the hydraulic accumulator is installed between the two pumps to make the system more compact, two check valves are used to prevent cavitation, and two pressure relief valves are used for safety purposes.
2.2. DDH Model
The DDH models mainly include the pump and cylinder. In the model, the following assumptions are given: the hydraulic cylinder leakage is zero, the hydraulic cylinder load is an inertial load, and there is no elastic load.
2.2.1. Pump Model
The flow equation of the pump is given by
where
is the volumetric efficiency of the pump, and it is set to be 85%;
is the angular velocity,
is the volumetric displacement.
2.2.2. Cylinder Model
The flow equation of the hydraulic cylinder can be expressed by
where
and
are the flow of the chamber
A and chamber
B,
is the piston area,
is the difference in piston and piston rod area,
x is the absolute position of the piston
and
are the pressures of chamber
A and chamber
B,
is the effective bulk modulus,
and
is the total volume of chamber
A and chamber
B,
and
are”dead volume” of chamber
A and chamber
B.
Hydraulic cylinder force balance equation can be expressed by
where
is damping coefficient,
is the random external load force.
2.2.3. State-Space Equation
Defining the state variables
, based on Equations (1)–(7), the system state-space equations can be represented as
where
2.2.4. Mechanical Model of the Micro-Crane
The schematic diagram of the crane structure is shown in
Figure 2.
The load force acts on the end of the crane structure and generates torque around the joint Θ. The torque balance equation is displayed as follows
where
is the net hydraulic force,
g is the gravitational constant,
α is the angle between the cylinder and the boom,
is a mass,
and
are the distance to the upper fastening point of the cylinder,
are the angles between the centre of mass and the vertical axis.
The angles
,
,
,and
shown in
Figure 2 can be determined by adding the change of
θ to the measured value when the hydraulic cylinder is fully retracted
Use the sine rule given below to obtain the angle
where
is the distance to the fastening point on the cylinder, and
is the length of the cylinder plus the stroke of the piston.
is derived using the cosine rule
According to the derivation of Equation (16), the hydraulic cylinder velocity can be expressed by
2.2.5. Model Validation
This subsection verifies the feasibility of the deduced state-space equation of the DDH. The parameters of the DDH are shown in
Table 2. Firstly, the experimental data from reference [
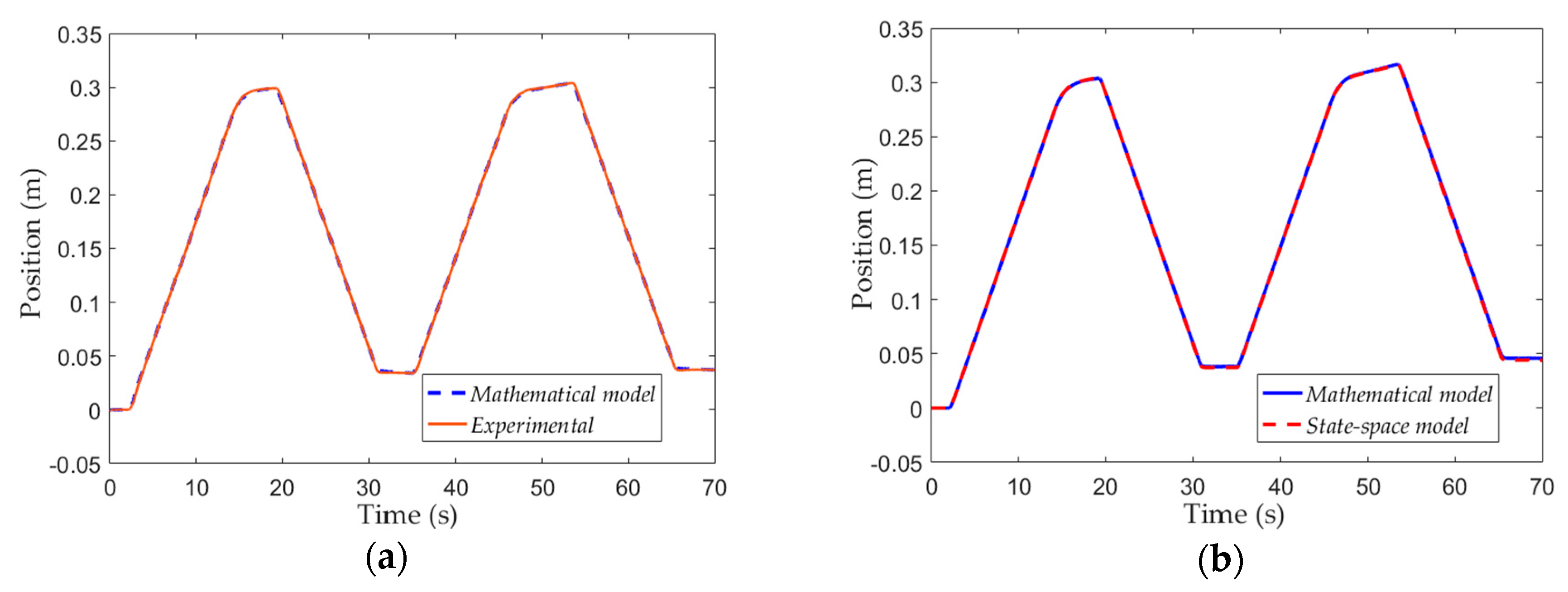
10] is used to verify the accuracy of the mathematical model of DDH. The comparison between the simulation results of the mathematical model and the experimental results show that the position curve is basically consistent, as shown in
Figure 3a. Then, the simulation was performed using the state-space model, and the result is shown in
Figure 3b. The position curve of the state-space model almost overlaps the other (mathematical model), which indicates that the created state-space model has acceptable accuracy for the design of the ADRC controller.
3. Design of ADRC
ADRC is a control algorithm without dependence on the system model. Its basic idea is to consider unmodelled dynamics and unknown external disturbance as “total disturbance” of the system. Further, the total disturbance is estimated and compensated. ADRC is mainly composed of three parts: the tracking differentiator (TD), the extended state observer (ESO), and the nonlinear feedback control law (NFCL) [
20,
21].
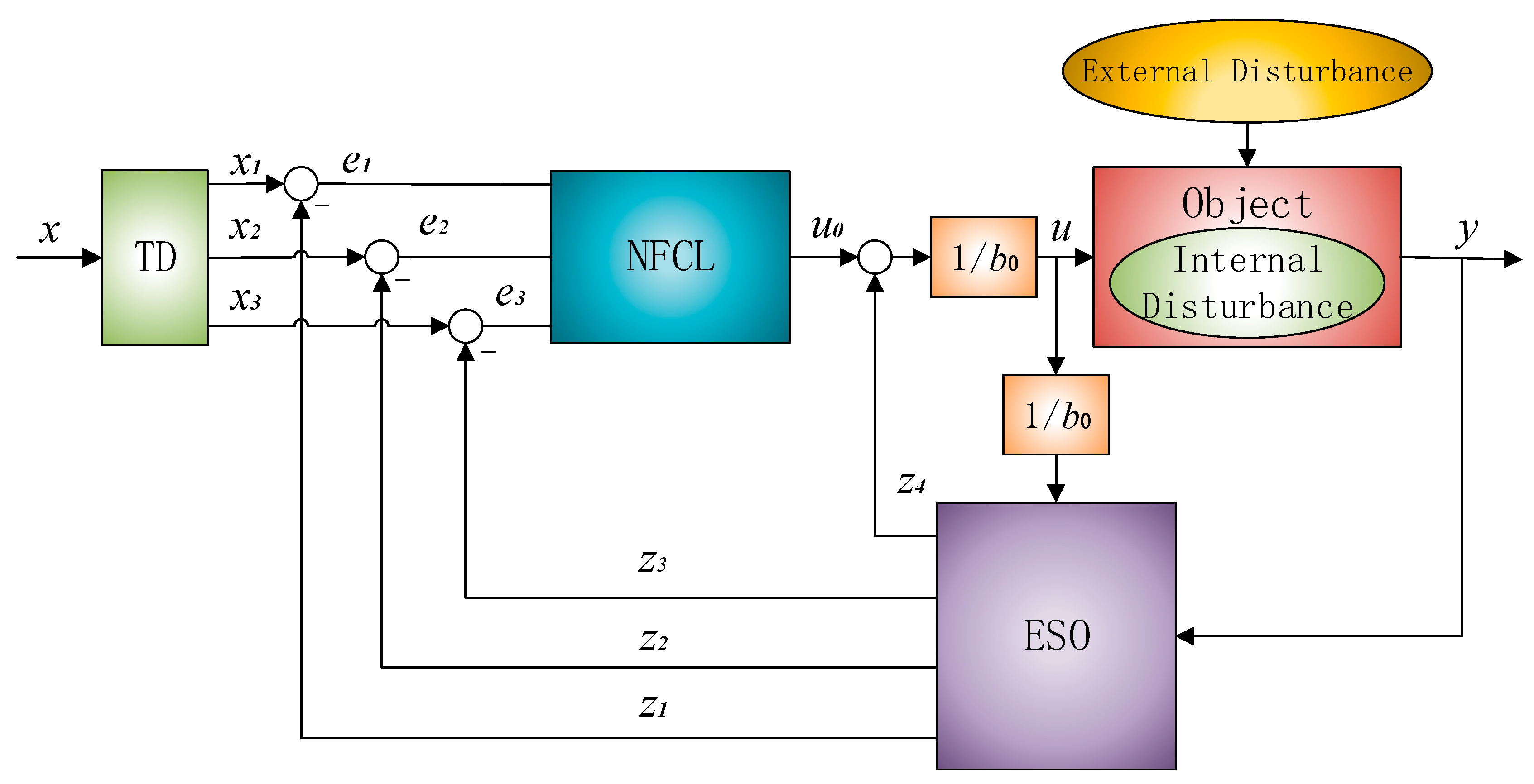
Figure 4 illustrates the structure of ADRC. TD is used to arrange the transition process, and the input signal
x1 passes through the TD to give the differential signals:
x2 and
x3; ESO is used to give the estimated value of the state variables and total disturbance;
z1,
z2,
z3 is the estimated value of the state;
z4 is the estimated value of the total disturbance; NFCL is used to nonlinearly combine the error between the transition process and the estimated state variables to achieve nonlinear control strategy;
e1,
e2,
e3 is the deviation signal;
b0 is the compensation factor;
y is the output signal.
3.1. Design of TD
TD is actually a signal processing; it can closely track the input signal and give the differential signal of the input signal. Thus, it is possible to reduce the initial error of the system and avoid overshooting caused by the sudden change in setting value [
20,
21]. The DDH adopts a three-order TD, and the discrete forms can be represented as follows
where
r is the speed factor,
T is the sampling period,
h is the filtering factor for the input signal;
is the fast optimal control function, and its definition is as follows
3.2. Design of ESO
The ESO is the core part of ADRC, which can track the state variables and estimate the internal and external disturbance of the system without the need for any precise mathematical model. The DDH uses a four-order ESO.
Let
be the nominal values of
, respectively, and then can be expressed by
Let
be the difference between the nominal value and the actual value of the parameter,
, then Equation (8) can be rewritten as
where
represents the total disturbance of the system; in order to estimate the total disturbance, defining
as an extended state variable of the system, and assuming that
is differentiable, the system can be expressed by
where
represents the change rate of
.
Let
be the estimated vector of state
x, then the ESO is designed as
Observer gain is simplified according to the bandwidth concept from reference [
22].
3.3. Design of NFCL
Using the fastest control synthesis function
fhan to perform nonlinear combination of errors, the algorithm can be expressed by
4. Simulation Results and Analysis
This section combines the DDH model, the micro-crane mechanical model, and the designed ADRC method into one model, uses sine signal and actual working position signal as inputs to the system, and compares the position tracking performance with P and PI controller. The simulation parameters of DDH are shown in
Table 2, and the parameters of the micro-crane are shown in
Table 3.
4.1. Sine Signal
In order to test the performance of the adopted control method, the sine position signal was set as Equation (28), and the tracking performance of ARDC was analyzed with or without disturbance. The simulation result without disturbance is shown in
Figure 5.
The working process of the hydraulic system is often accompanied by the disturbance of the external load force. In order to compare the tracking performance and robustness with different control methods, a sudden disturbance force is added. The control tracking effect is shown in
Figure 6.
As shown in
Figure 5 and
Figure 6,
Table 4, without disturbance, the maximum errors of P control and PI control are 5.132 and 2.080 mm. In contrast, the maximum error of ADRC is 1.514 mm. It can be seen that the maximum tracking error is reduced by about 70% and 27%, and the root means that square error is reduced by about 86% and 66%, respectively. With disturbance, the maximum errors of P control and PI control are 5.275 and 2.081 mm. In contrast, the maximum error of ADRC is 1.514 mm. The maximum tracking error is reduced by about 71% and 27%, and the root means that square error is reduced by about 89% and 69%, respectively. It can be seen that, with ADRC, certain fluctuations appear at the beginning, but this will converge quickly. The position tracking error shown in
Figure 5b and
Figure 6c reveals that the ADRC suppresses internal and external disturbances effectively, with high position tracking precision and strong robustness.
4.2. Actual Working Position Signal
The simulation was carried out using the actual working position signal as input, and the simulation result without disturbance is shown in
Figure 7.
Further, the simulation was carried out with disturbance to compare the tracking performance and robustness with varying control methods. The simulation result with disturbance is shown in
Figure 8.
As shown in
Figure 7 and
Figure 8,
Table 5, without disturbance, the maximum errors of P control and PI control are 3.829 and 5.221 mm. In contrast, the maximum error of ADRC is 2.193 mm, the maximum tracking error is reduced by about 43% and 58%, and the root means square error is reduced by about 78% and 73%, respectively. With disturbance, the maximum errors of P control and PI control are 4.189 and 5.221 mm. In contrast, the maximum error of ADRC is 2.183 mm. The maximum tracking error is reduced by about 48% and 58%, and the root means square error is reduced by about 81% and 73%, respectively. The position tracking error shown in
Figure 7b and
Figure 8c reveals that the ADRC suppresses internal and external disturbances effectively, with high position tracking precision and strong robustness.
In summary, the simulation results show that the proposed ADRC control method has better tracking performance and stronger robustness.
5. Conclusions
Aiming towards the problems of uncertain parameters and unknown external disturbances in the DDH, an ADRC controller was designed. The control method can estimate the total disturbance, including parameter uncertainty and unknown disturbance, and provide compensation. A model was built, including the DDH, mechanism of the crane, and ADRC controller. Simulations were performed using two types of reference signal. The simulation results reveal that, without disturbance, compared with the P and PI control, ADRC can reduce the maximum error by about 43% and 58%, and can decrease the root means square error by about 78% and 73%. With disturbance, compared with P and PI control, ADRC reduces the maximum error by about 48% and 58%, and decrease the root means square error by about 81% and 73%. The results show that, compared with PID control, ADRC can suppress internal and external disturbances effectively, has the advantage of robustness, and improves the position tracking precision.
Although the control method ADRC can improve control accuracy on the DDH based on the simulation results, it should be compared with experimental data for validation. Hence, in the near future, a test bench needs to be set up, and experiments should be performed with the proposed control method.
Author Contributions
Conceptualization, S.Z., A.W. and F.D.; methodology, S.Z. and A.W.; software, A.W.; investigation, S.Z. and A.W.; writing—original draft preparation, S.Z. and A.W.; writing—review and editing, F.D.; supervision, S.Z.; project administration, F.D.; funding acquisition, F.D. All authors have read and agreed to the published version of the manuscript.
Acknowledgments
This work was supported by the Science Foundation for Young Scholars of Fujian Province (No. 2018J05099), the Scientific Research Fund (No. GY-Z15096), Fujian Haiyuan Composite Materials Technology Co., Ltd. and the Public Service Platform for Technical Innovation of Machine Tool Industry in Fujian University of Technology.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| DDH | double-pump direct-driven hydraulics |
| ARDC | Active disturbance rejection control |
| PID | Proportional–Integral–Differential |
| P | Proportional |
| PI | Proportional–Integral |
| TD | Tracking differentiator |
| ESO | Extended state observer |
| NFCL | Nonlinear feedback control law |
References
- Quan, L. Current State, Problems and the Innovative Solution of Electro-hydraulic Technology of Pump Controlled Cylinder. Chin. J. Mech. Eng. 2008, 44, 87–92. [Google Scholar] [CrossRef]
- Zhang, S.; Minav, T.; Pietola, M. Performance Comparison between Single and Double Pump Controlled Asymmetric Cylinder under Four-quadrant Operation. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2018, 49, 409–419. [Google Scholar]
- Fu, S.; Wang, L.; Lin, T. Control of electric drive powertrain based on variable speed control in construction machinery. Autom. Constr. 2020, 119, 103281. [Google Scholar] [CrossRef]
- Lin, T.; Lin, Y.; Ren, H.; Chen, H.; Chen, Q.; Li, Z. Development and key technologies of pure electric construction machinery. Renew. Sustain. Energy Rev. 2020, 132, 110080. [Google Scholar] [CrossRef]
- Aliskan, H.; Balkan, T.; Platin, B.E. A Complete Analysis and a Novel Solution for Instability in Pump Controlled Asymmetric Actuators. J. Dyn. Syst. Meas. Control 2015, 137, 091008. [Google Scholar] [CrossRef]
- Quan, Z.; Quan, L.; Zhang, J. Review of energy efficient direct pump controlled cylinder electro-hydraulic technology. Renew. Sustain. Energy Rev. 2014, 35, 336–346. [Google Scholar] [CrossRef]
- Imam, A.; Rafiq, M.; Jalayeri, E.; Sepehri, N. A Pump-Controlled Circuit for Single-Rod Cylinders that Incorporates Limited Throttling Compensating Valves. Actuators 2018, 7, 13. [Google Scholar] [CrossRef]
- Jalayeri, E.; Imam, A.; Tomas, Z.; Sepehri, N. A throttle-less single-rod hydraulic cylinder positioning system: Design and experimental evaluation. Adv. Mech. Eng. 2015, 7, 1–14. [Google Scholar] [CrossRef]
- Zhang, X.G.; Quan, L. The Performance Analysis and Experimental Research of Multiple Oil Ports Axial Piston Pump which Able to Control the Movement of Differential Cylinder Directly in the Closed Circuit. Adv. Mater. Res. 2011, 308–310, 388–400. [Google Scholar] [CrossRef]
- Agostini, T.; Negri, V.D.; Minav, T.; Pietola, M. Effect of Energy Recovery on Efficiency in Electro-Hydrostatic Closed System for Differential Actuator. Actuators 2020, 9, 12. [Google Scholar] [CrossRef]
- Schmidt, L.; Groenkjaer, M.; Pedersen, H.C.; Andersen, T.O. Position Control of an Over-Actuated Direct Hydraulic Cylinder Drive. Control Eng. Pract. 2017, 64, 1–14. [Google Scholar] [CrossRef]
- Schmidt, L.; Andersen, T.O.; Pedersen, H.C.; Hansen, A.H. An Energy Efficent Hydraulic Winch Drive Concept Based on a Speed-Variable Switched Differentiak Pump. In Proceedings of the ASME/Bath 2017 Symposium on Fluid Power & Motion Control, Sarasota, FL, USA, 16–19 October 2017. [Google Scholar]
- Lee, L.; Chen, C.; Li, I.; Huang, J. The positioning control of an electro-hydraulic variable rotational speed pump-controlled system using adaptive fuzzy controller with self-tuning fuzzy sliding mode compensation. In Proceedings of the IEEE International Conference on Fuzzy Systems, Taipei, Taiwan, 27–30 June 2011. [Google Scholar]
- Dang, X.B.; Truong, D.Q.; Bae, J.; Ahn, K.K. An Effective Disturbance-Observer-Based Nonlinear Controller for a Pump-Controlled Hydraulic System. IEEE/ASME Trans. Mechatron. 2019, 99, 32–43. [Google Scholar]
- Seo, H.T.; Kang, D.G.; Hong, Y.P.; Kim, K.S.; Lee, J. Combined Feedforward/Disturbance Observer-Based Control of Pump-Controlled Electro-Hydrostatic Actuation System. In Proceedings of the International Conference on Control, HICO, Gyeongju, Korea, 16–19 October 2016. [Google Scholar]
- Ahn, K.K.; Nam, D.N.C.; Jin, M. Adaptive Backstepping Control of an Electrohydraulic Actuator. IEEE/ASME Trans. Mechatron. 2014, 19, 987–995. [Google Scholar] [CrossRef]
- Tri, N.M.; Nam, D.N.C.; Park, H.G.; Ahn, K.K. Trajectory control of an electro hydraulic actuator using an iterative backstepping control scheme. Mechatronics 2015, 29, 96–102. [Google Scholar] [CrossRef]
- Guo, Q.; Yu, T.; Jiang, D. Adaptive backstepping design of electro-hydraulic actuator based on state feedback control. In Proceedings of the International Conference on Fluid Power & Mechatronics, Harbin, China, 5–7 August 2015. [Google Scholar]
- Järf, A. Flow Compensation Using Hydraulic Accumulator in Direct Driven Hydraulic Differential Cylinder Application and Effects on Energy Effciency. Master’s Thesis, Aalto University, Espoo, Finland, 2016. [Google Scholar]
- Gao, B.; Shao, J.; Yang, X. A compound control strategy combining velocity compensation with ADRC of electro-hydraulic position servo control system. Trans. Chin. Soc. Agric. Mach. 2014, 53, 1910–1918. [Google Scholar] [CrossRef] [PubMed]
- Shuhua, Z.; Xiangzhou, W.; Ye, L.U.; Yu, W. An Active-Disturbance-Rejection Controller for Speed Control of Variable-Displacement Motor at the Constant Pressure Network. In Proceedings of the 32nd Chinese control Conferrnce, Xi’an, China, 26–28 July 2013; p. 5. [Google Scholar]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Denver, CO, USA, 1–3 July 2003. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}