Integral Sliding Mode Backstepping Control of an Asymmetric Electro-Hydrostatic Actuator Based on Extended State Observer †

Abstract
:1. Introduction
2. Principal Analysis and Modelling
2.1. Load Force Analysis of a Micro Crane
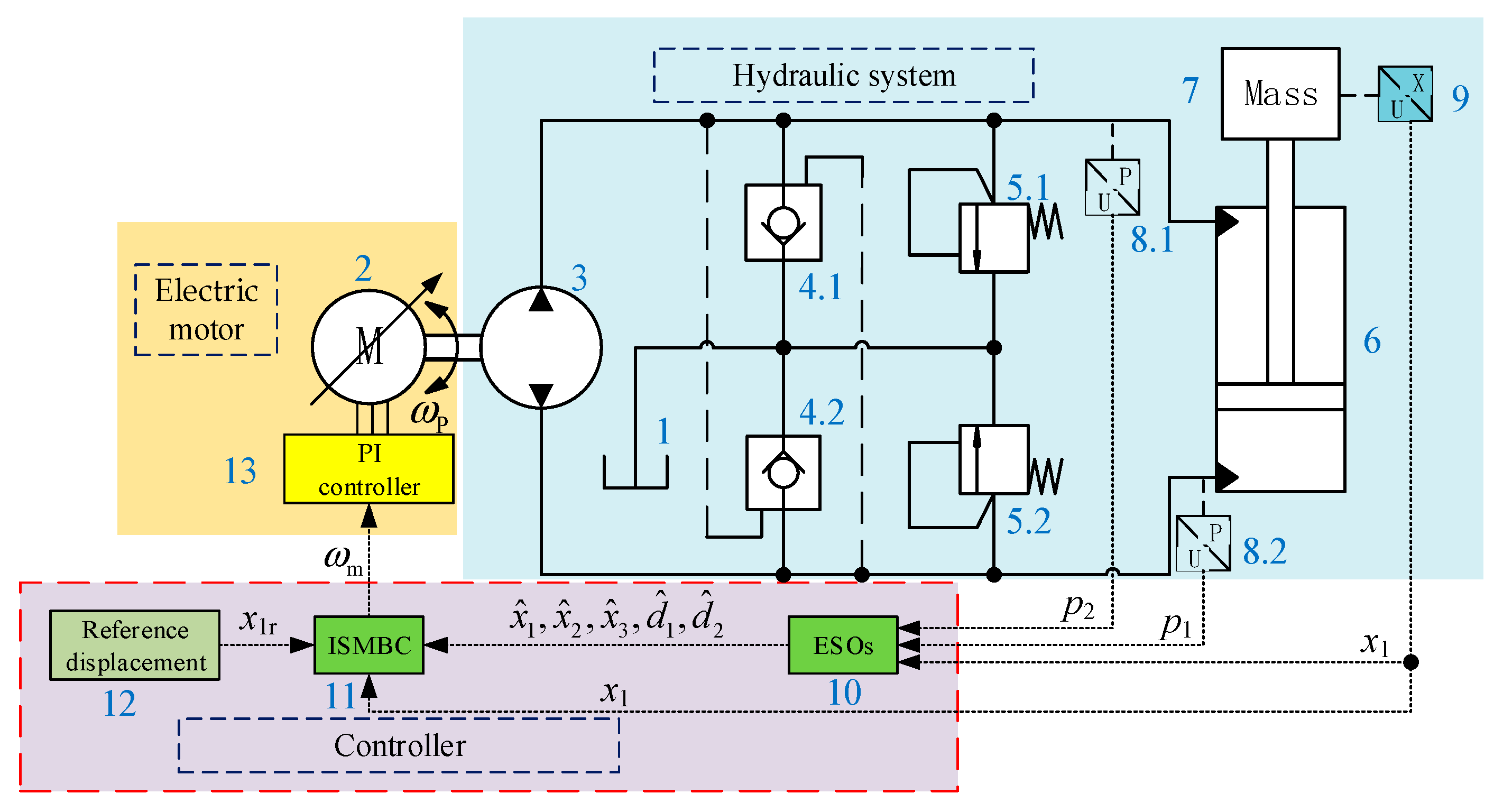
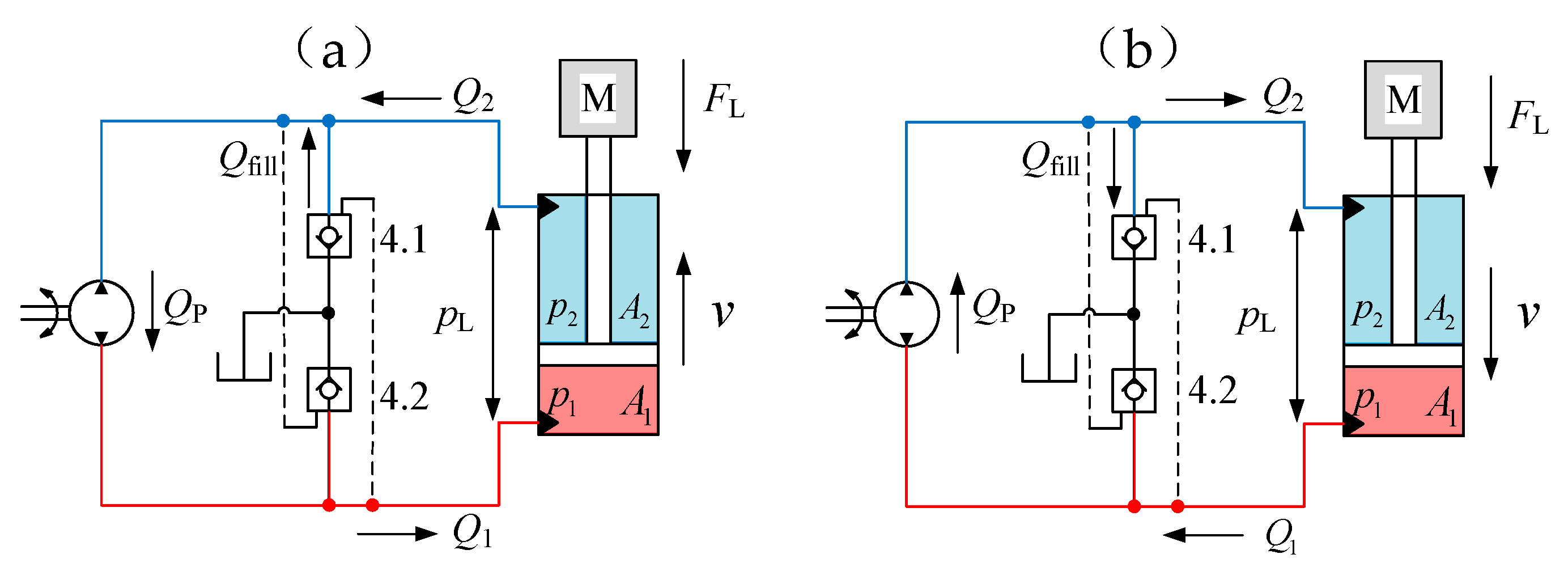
2.2. Principle Analysis of EHA
2.3. Modelling
2.3.1. Model of the Electric Motor
2.3.2. Model of the Hydraulic System
3. Design and Analysis of ESOs
3.1. Design of ESOs
3.2. Lyapunov Analysis of ESOs
4. Design and Analysis of ISMBC Controller
4.1. Design of the Controller
4.2. Stability Analysis of the Controller
5. Simulation Analysis
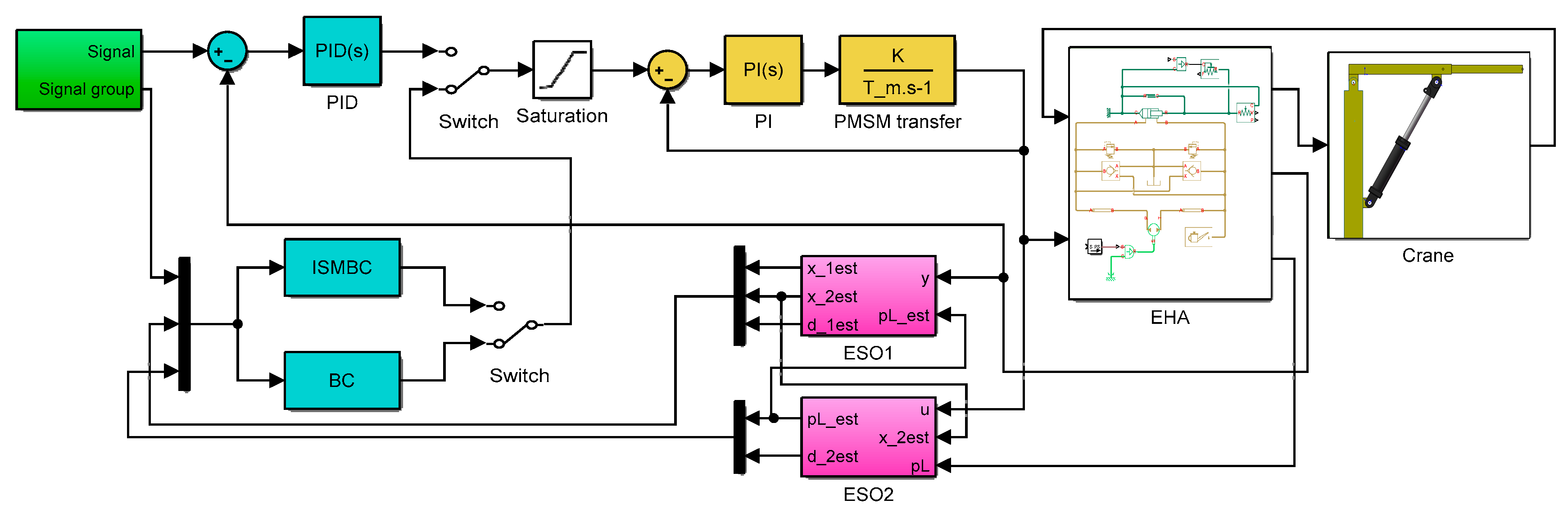
5.1. Simulation Model
5.2. Results Analysis
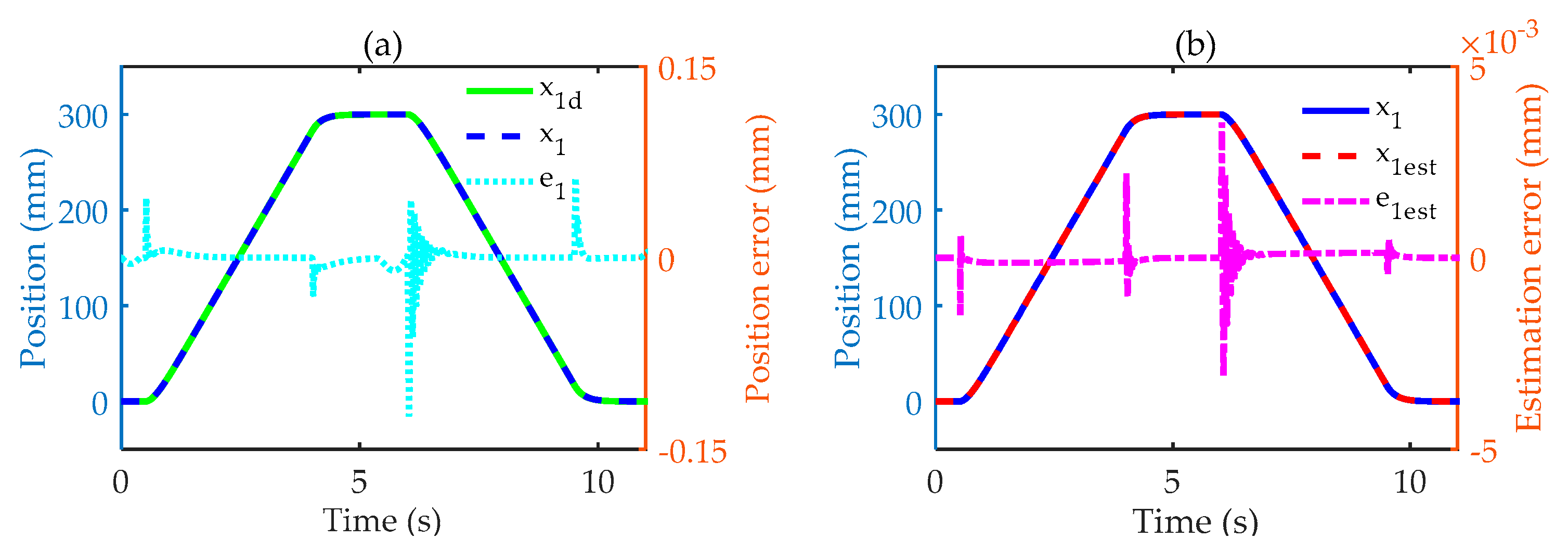
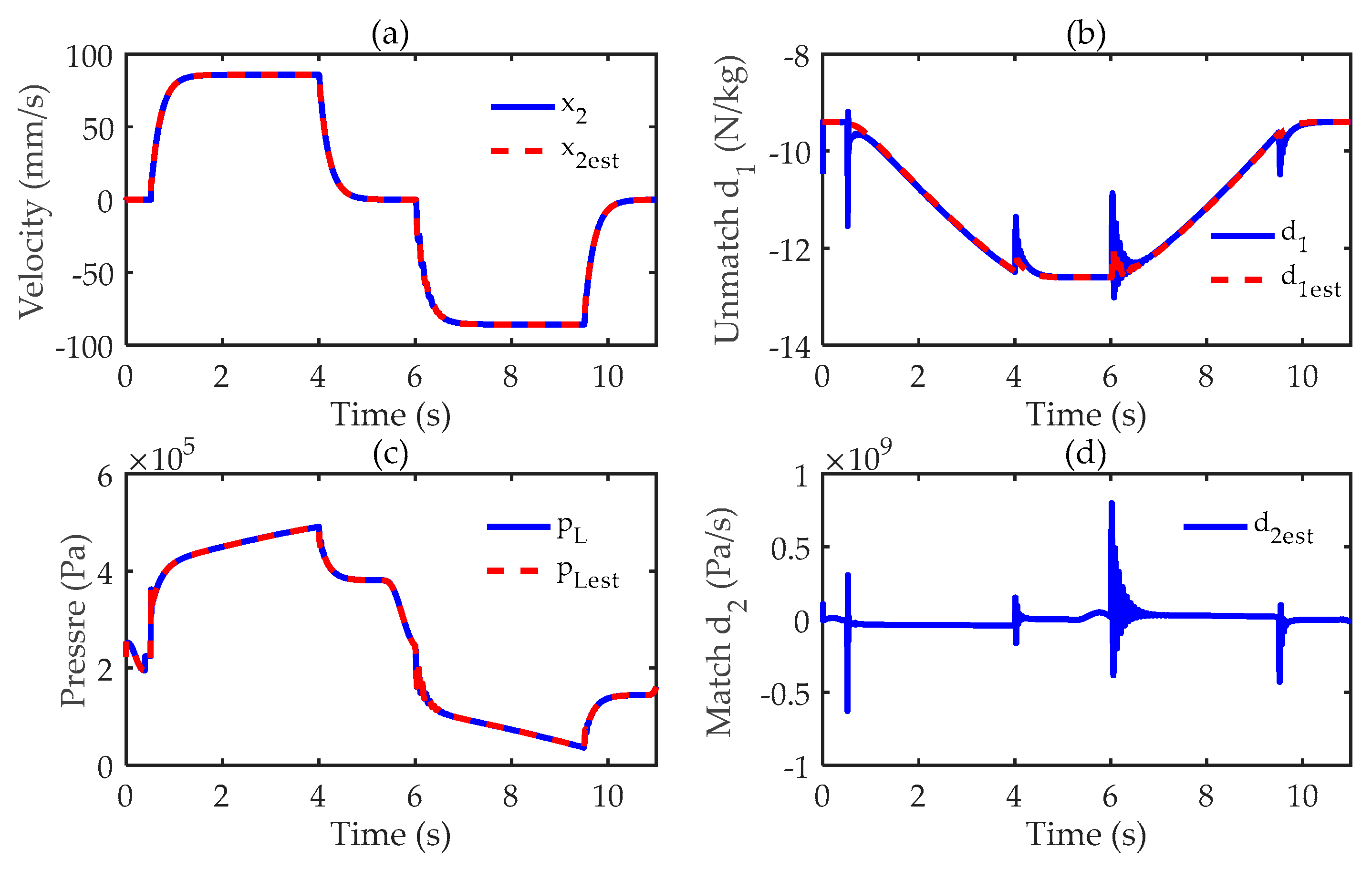
5.2.1. Observer Verification
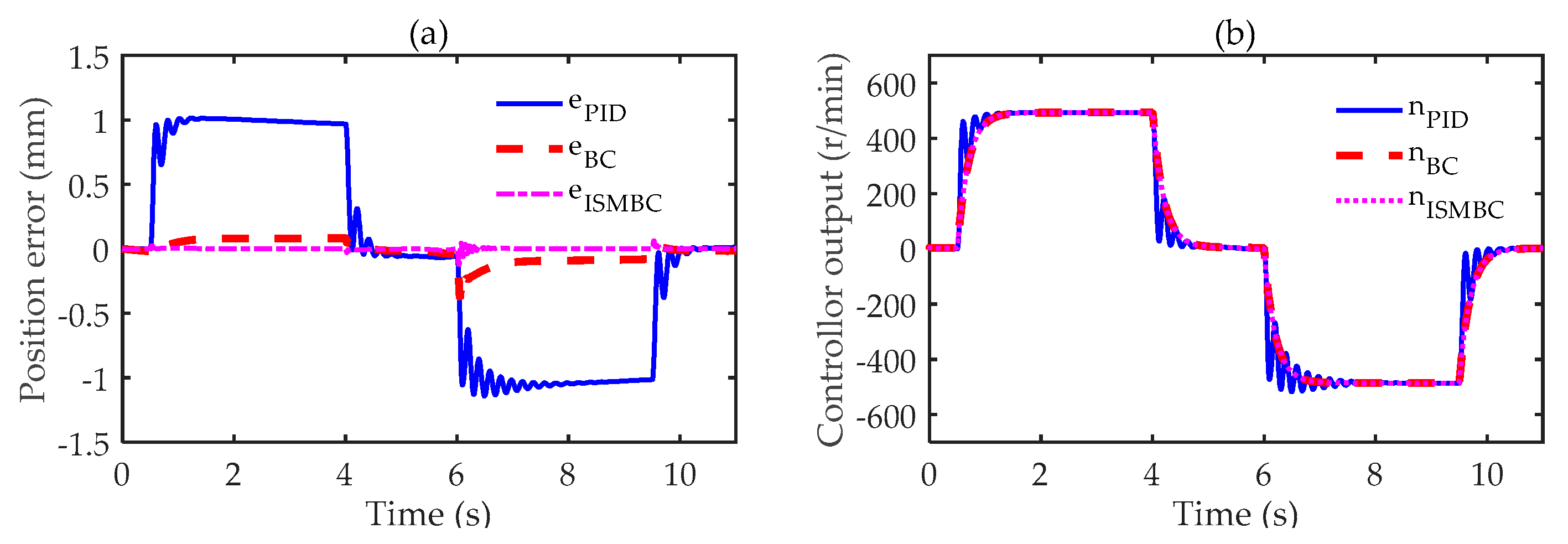
5.2.2. Control Performance without Load
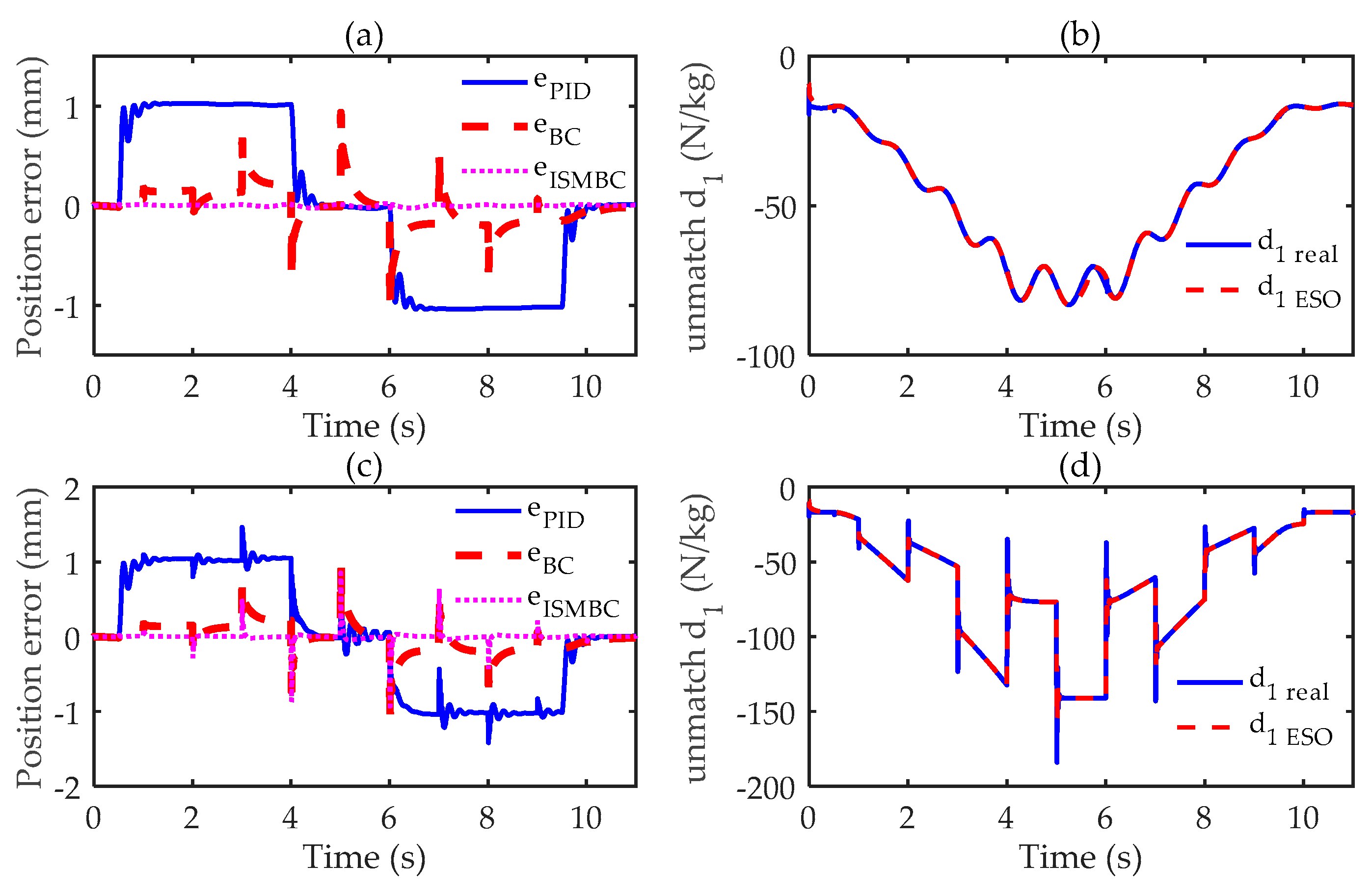
5.2.3. Control Performance with Varing Loads
5.2.4. Control Performance with Varying Disturbances
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| ISMBC | Integral Sliding Mode Backstepping Control |
| EHA | Electro-Hydrostatic Actuator |
| ESO | Extended State Observer |
| BC | Backstepping Control |
| PID | Proportional-Integral-Derivative |
References
- LI, Z.; Shang, Y.; Jiao, Z.; Lin, Y.; Wu, S.; LI, X. Analysis of the dynamic performance of an electro-hydrostatic actuator and improvement methods. Chin. J. Aeronaut. 2018, 31, 2312–2320. [Google Scholar] [CrossRef]
- Kuboth, S.; Heberle, F.; Weith, T.; Welzl, M.; König-Haagen, A.; Brüggemann, D. Experimental short-term investigation of model predictive heat pump control in residential buildings. Energy Build. 2019, 204, 109444. [Google Scholar] [CrossRef]
- Lin, T.; Lin, Y.; Ren, H.; Chen, H.; Chen, Q.; Li, Z. Development and key technologies of pure electric construction machinery. Renew. Sustain. Energy Rev. 2020, 132, 110080. [Google Scholar] [CrossRef]
- Li, K.; Lv, Z.; Lu, K.; Yu, P. Thermal-hydraulic Modeling and Simulation of the Hydraulic System based on the Electro-hydrostatic Actuator. Procedia Eng. 2014, 80, 272–281. [Google Scholar] [CrossRef]
- Quan, Z.; Quan, L.; Zhang, J. Review of energy efficient direct pump controlled cylinder electro-hydraulic technology. Renew. Sustain. Energy Rev. 2014, 35, 336–346. [Google Scholar] [CrossRef]
- Ge, L.; Quan, L.; Zhang, X.; Zhao, B.; Yang, J. Efficiency improvement and evaluation of electric hydraulic excavator with speed and displacement variable pump. Energy Convers. Manag. 2017, 150, 62–71. [Google Scholar] [CrossRef]
- Fu, S.; Wang, L.; Lin, T. Control of electric drive powertrain based on variable speed control in construction machinery. Automat. Constr. 2020, 119, 103281. [Google Scholar] [CrossRef]
- Navatha, A.; Bellad, K.; Hiremath, S.S.; Karunanidhi, S. Dynamic Analysis of Electro Hydrostatic Actuation System. Procedia Technol. 2016, 25, 1289–1296. [Google Scholar] [CrossRef]
- Ur Rehman, W.; Wang, S.; Wang, X.; Fan, L.; Shah, K.A. Motion synchronization in a dual redundant HA/EHA system by using a hybrid integrated intelligent control design. Chin. J. Aeronaut. 2016, 29, 789–798. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, Y.; Hua, L.; Zhao, X.; Wang, X. Energy improvement of fineblanking press by valve-pump combined controlled hydraulic system with multiple accumulators. J. Clean. Prod. 2020, 257, 120505. [Google Scholar] [CrossRef]
- Kumar, M. A survey on electro hydrostatic actuator: Architecture and way ahead. Mater. Today Proc. 2020. [Google Scholar] [CrossRef]
- Altare, G.; Vacca, A. A Design Solution for Efficient and Compact Electro-hydraulic Actuators. Procedia Eng. 2015, 106, 8–16. [Google Scholar] [CrossRef]
- Mu, T.; Zhang, R.; Xu, H.; Zheng, Y.; Fei, Z.; Li, J. Study on improvement of hydraulic performance and internal flow pattern of the axial flow pump by groove flow control technology. Renew. Energy 2020, 160, 756–769. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, Z.; Yao, B. Development of parallel-connected pump—Valve-coordinated control unit with improved performance and efficiency. Mechatronics 2020, 70, 102419. [Google Scholar] [CrossRef]
- Agostini, T.; De Negri, V.; Minav, T.; Pietola, M. Effect of Energy Recovery on Efficiency in Electro-Hydrostatic Closed System for Differential Actuator. Actuators 2020, 9, 12. [Google Scholar] [CrossRef]
- Gao, B.; Li, X.; Zeng, X.; Chen, H. Nonlinear control of direct-drive pump-controlled clutch actuator in consideration of pump efficiency map. Control. Eng. Pract. 2019, 91, 104110. [Google Scholar] [CrossRef]
- Ma, X.; Gao, D.; Liang, D. Improved Control Strategy of Variable Speed Pumps in Complex Chilled Water Systems Involving Plate Heat Exchangers. Procedia Eng. 2017, 205, 2800–2806. [Google Scholar] [CrossRef]
- Sakaino, S.; Tsuji, T. Resonance Suppression of Electro-hydrostatic Actuator by Full State Feedback Controller Using Load-side Information and Relative Velocity. IFAC-PapersOnLine 2017, 50, 12065–12070. [Google Scholar] [CrossRef]
- Sahu, G.N.; Singh, S.; Singh, A.; Law, M. Static and Dynamic Characterization and Control of a High-Performance Electro-Hydraulic Actuator. Actuators 2020, 9, 46. [Google Scholar] [CrossRef]
- Ohrem, S.J.; Holden, C. Modeling and Nonlinear Model Predictive Control of a Subsea Pump Station ⁎ ⁎This work was carried out as a part of SUBPRO, a Research-based Innovation Centre within Subsea Production and Processing. The authors gratefully acknowledge the financial support from SUBPRO, which is financed by the Research Council of Norway, major industry partners, and NTNU. IFAC-PapersOnLine 2017, 50, 121–126. [Google Scholar]
- Wei, S.G.; Zhao, S.D.; Zheng, J.M.; Zhang, Y. Self-tuning dead-zone compensation fuzzy logic controller for a switched-reluctance-motor direct-drive hydraulic press. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2009, 223, 647–656. [Google Scholar] [CrossRef]
- Yan, L.; Qiao, H.; Jiao, Z.; Duan, Z.; Wang, T.; Chen, R. Linear motor tracking control based on adaptive robust control and extended state observer. In Proceedings of the 2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; pp. 704–709. [Google Scholar]
- Cai, Y.; Ren, G.; Song, J.; Sepehri, N. High precision position control of electro-hydrostatic actuators in the presence of parametric uncertainties and uncertain nonlinearities. Mechatronics 2020, 68, 102363. [Google Scholar] [CrossRef]
- Lin, Y.; Shi, Y.; Burton, R. Modeling and Robust Discrete-Time Sliding-Mode Control Design for a Fluid Power Electrohydraulic Actuator (EHA) System. IEEE/ASME Trans. Mechatron. 2013, 18, 1–10. [Google Scholar] [CrossRef]
- Fu, M.; Liu, T.; Liu, J.; Gao, S. Neural network-based adaptive fast terminal sliding mode control for a class of SISO uncertain nonlinear systems. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 1456–1460. [Google Scholar]
- Alemu, A.E.; Fu, Y. In Sliding mode control of electro-hydrostatic actuator based on extended state observer. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May2017; pp. 758–763. [Google Scholar]
- Sun, C.; Fang, J.; Wei, J.; Hu, B. Nonlinear Motion Control of a Hydraulic Press Based on an Extended Disturbance Observer. IEEE Access 2018, 6, 18502–18510. [Google Scholar] [CrossRef]
- WANG, Y.; GUO, S.; DONG, H. Modeling and control of a novel electro-hydrostatic actuator with adaptive pump displacement. Chin. J. Aeronaut. 2020, 33, 365–371. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J. High-precision motion servo control of double-rod electro-hydraulic actuators with exact tracking performance. ISA Trans. 2020, 103, 266–279. [Google Scholar] [CrossRef]
- Shen, Y.; Wang, X.; Wang, S.; Mattila, J. An Adaptive Control Method for Electro-hydrostatic Actuator Based on Virtual Decomposition Control. In Proceedings of the 2020 Asia-Pacific International Symposium on Advanced Reliability and Maintenance Modeling (APARM), Vancouver, BC, Canada, 20–23 August 2020; pp. 1–6. [Google Scholar]
- Yang, G.; Yao, J. Output feedback control of electro-hydraulic servo actuators with matched and mismatched disturbances rejection. J. Frankl. Inst. 2019, 356, 9152–9179. [Google Scholar] [CrossRef]
- Ren, G.; Costa, G.K.; Sepehri, N. Position control of an electro-hydrostatic asymmetric actuator operating in all quadrants. Mechatronics 2020, 67, 102344. [Google Scholar] [CrossRef]
- Jing, C.; Xu, H.; Jiang, J. Dynamic surface disturbance rejection control for electro-hydraulic load simulator. Mech. Syst. Signal Process. 2019, 134, 106293. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter (unit) | Symbol | Value | Parameter (unit) | Symbol | Value |
|---|---|---|---|---|---|
| mass of boom (kg) | m | 30 | pump displacement (m3/r) | Dp | 13..3 × 10−6 |
| load mass (kg) | ml | 0–300 | big chamber area (m2) | A1 | 12.6 × 10−4 |
| gravitational acceleration (m/s2) | g | 9.81 | small chamber area (m2) | A2 | 6.4 × 10−4 |
| motor gain (rad/(sA)) | K | 8.95 | total volume (m3) | Vt | 4.4 × 10−4 |
| motor time constant (s) | τ | 7 × 104 | cylinder stroke (m) | s | 0.35 |
| effective bulk modulus (Pa) | βe | 1.4 × 109 | pump leakage coefficient ((m/s)/Pa) | ci | 2.93 × 109 |
| critical speed (m/s) | vth | 10−4 | coulomb friction (N) | FC | 50 |
| breakaway friction (N) | Fbrk | 100 | viscous friction coefficient | f | 2000 |
| speed coefficient | cv | 10 |
| Controller | Me [mm] | μe [mm] | σe [mm] | μu [mm] | σu [mm] |
|---|---|---|---|---|---|
| PID | 1.14 | 7.17 × 10−2 | 0.629 | 43.28 | 294.9 |
| ISMBC | 0.124 | 3.93 × 10−3 | 1.92 × 10−2 | 1.69 | 286.9 |
| BC | 0.374 | 3.11 × 10−2 | 9.10 × 10−2 | 3.787 | 272.8 |
| Controller | Load Mass [mm] | Me [mm] | μe [mm] | σe [mm] |
|---|---|---|---|---|
| PID | 100 kg | 1.06 | 0.112 | 0.619 |
| 200 kg | 1.05 | 0.103 | 0.654 | |
| 300 kg | 1.041 | 0.121 | 0.652 | |
| BC | 100 kg | 0.158 | 0.023 | 0.079 |
| 200 kg | 0.192 | 0.012 | 0.099 | |
| 300 kg | 0.236 | 0.007 | 0.115 | |
| ISMBC | 100 kg | 0.073 | 0.003 | 0.013 |
| 200 kg | 0.061 | 0.003 | 0.012 | |
| 300 kg | 0.052 | 0.001 | 0.011 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Li, S.; Dai, F. Integral Sliding Mode Backstepping Control of an Asymmetric Electro-Hydrostatic Actuator Based on Extended State Observer. Proceedings 2020, 64, 13. https://doi.org/10.3390/IeCAT2020-08495
Zhang S, Li S, Dai F. Integral Sliding Mode Backstepping Control of an Asymmetric Electro-Hydrostatic Actuator Based on Extended State Observer. Proceedings. 2020; 64(1):13. https://doi.org/10.3390/IeCAT2020-08495
Chicago/Turabian StyleZhang, Shuzhong, Su Li, and Fuquan Dai. 2020. "Integral Sliding Mode Backstepping Control of an Asymmetric Electro-Hydrostatic Actuator Based on Extended State Observer" Proceedings 64, no. 1: 13. https://doi.org/10.3390/IeCAT2020-08495
APA StyleZhang, S., Li, S., & Dai, F. (2020). Integral Sliding Mode Backstepping Control of an Asymmetric Electro-Hydrostatic Actuator Based on Extended State Observer. Proceedings, 64(1), 13. https://doi.org/10.3390/IeCAT2020-08495