Classification of the Runner’s Preferences in Running Shoes Based on Equilibrium-Point-Based Muscle Synergies †

Abstract
:1. Introduction
2. Materials and Methods
2.1. Subjects
2.2. Procedure
2.3. Data Collection
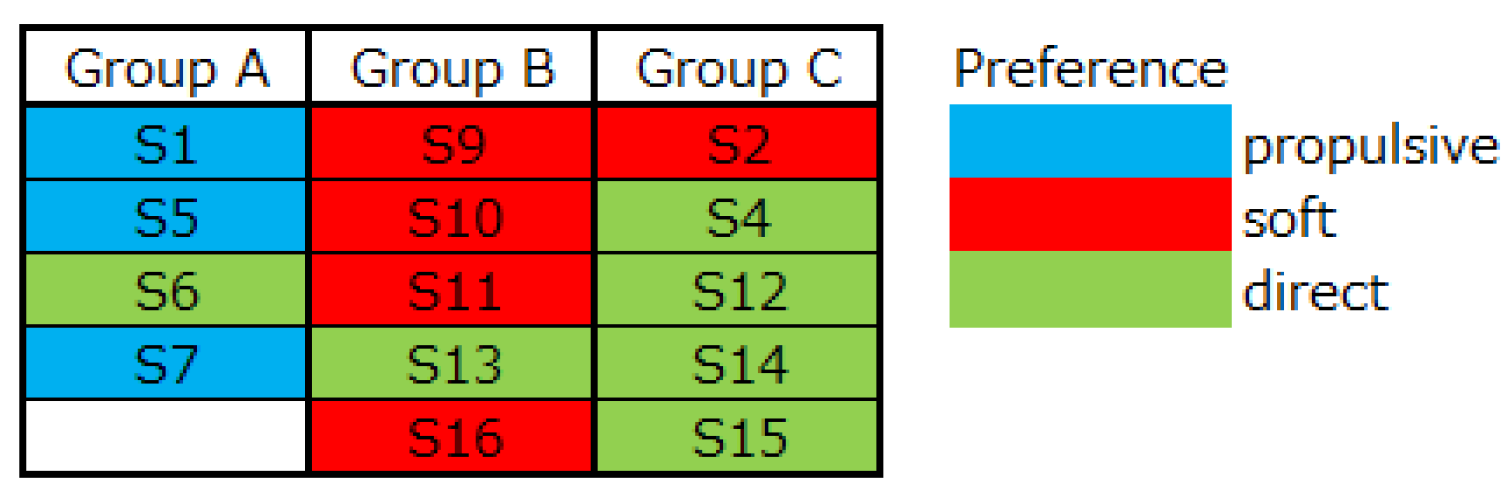
2.4. Shoe Preference Test
2.5. Data Analysis
2.5.1. Agonist–Antagonist Ratio and Agonist–Antagonist Sum
2.5.2. Synergy Vectors and Synergy Activation Coefficients
3. Results
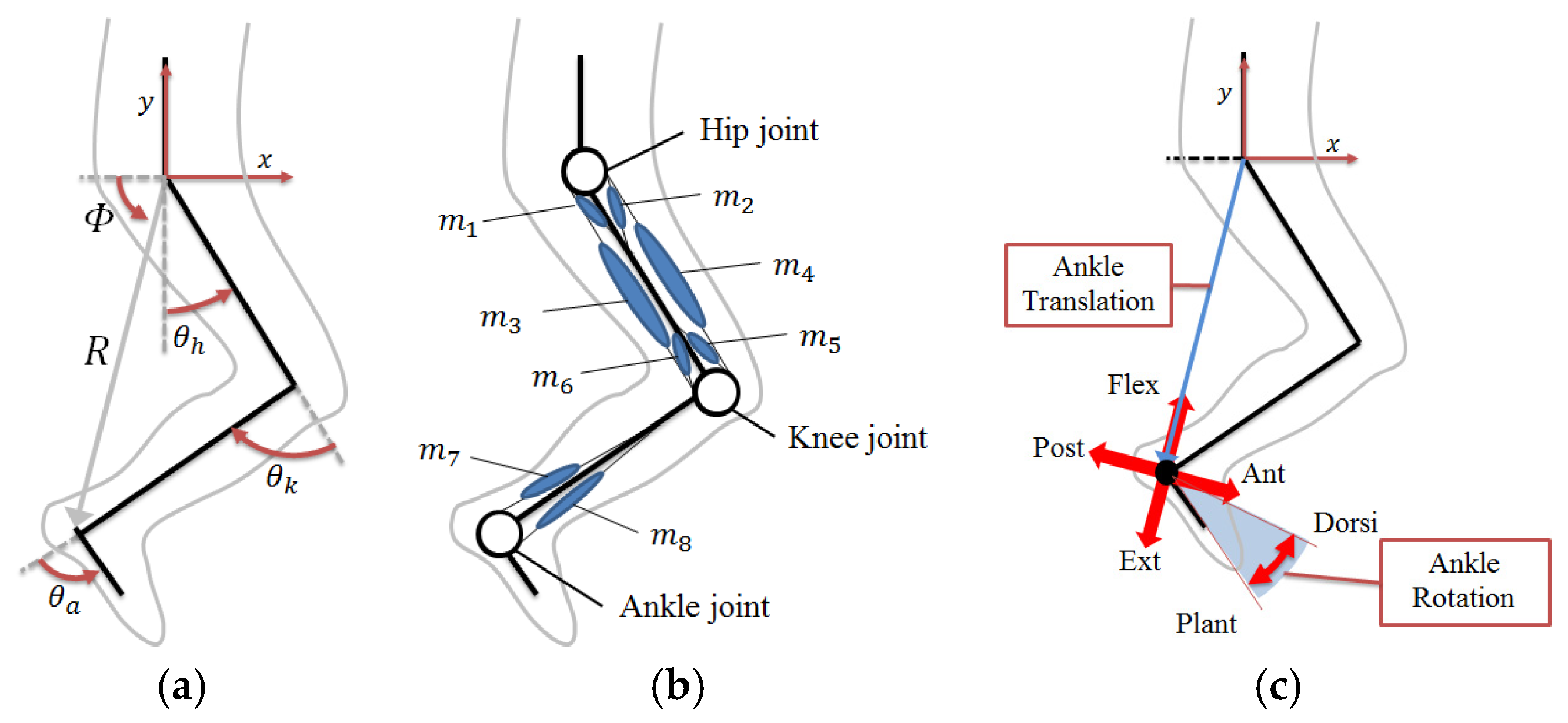
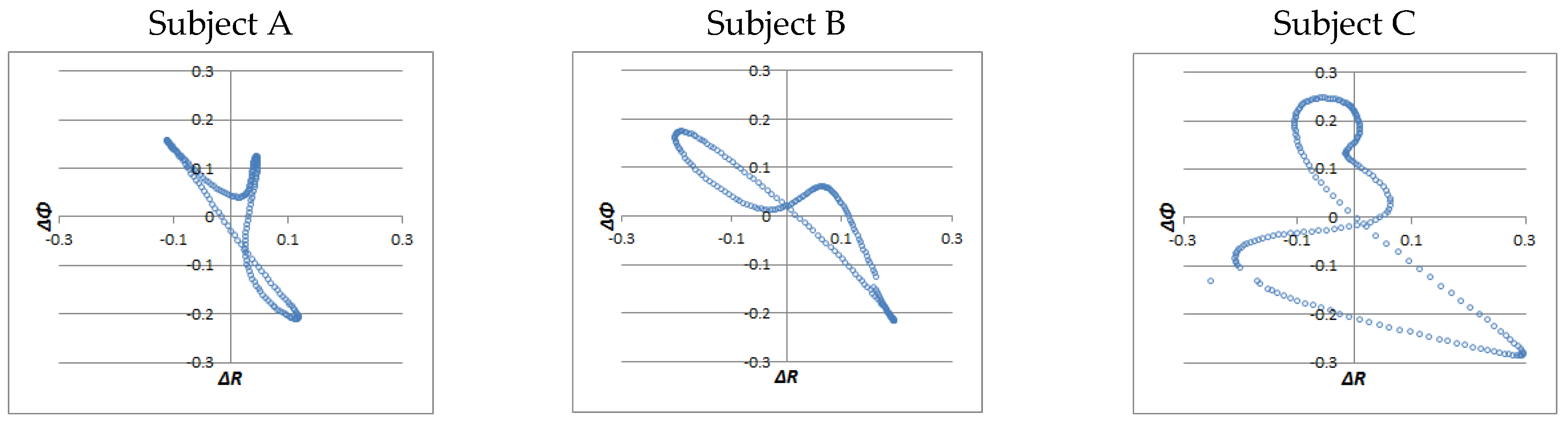
3.1. Ankle EP Trajectory
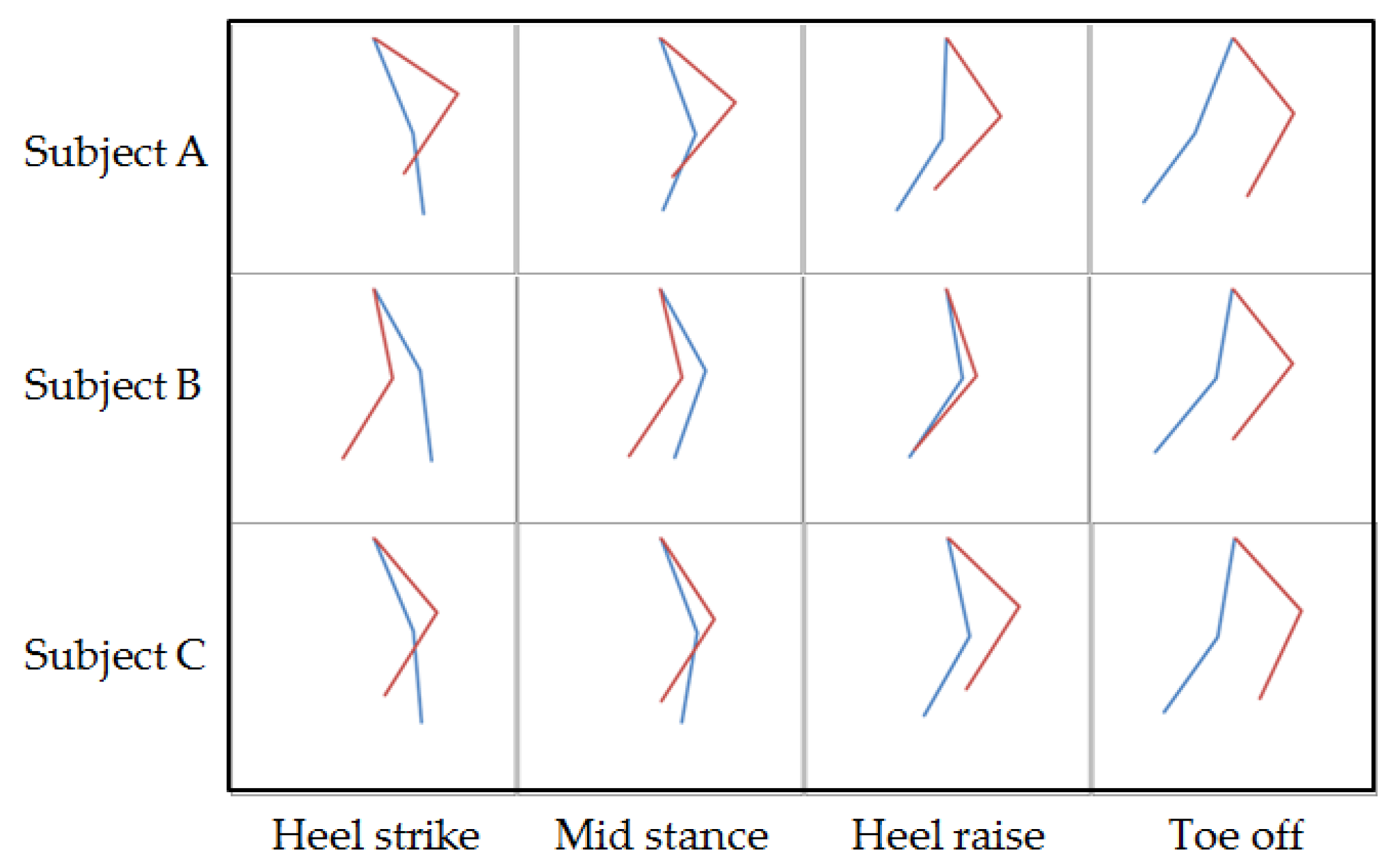
3.2. Lower-Limb EP Posture
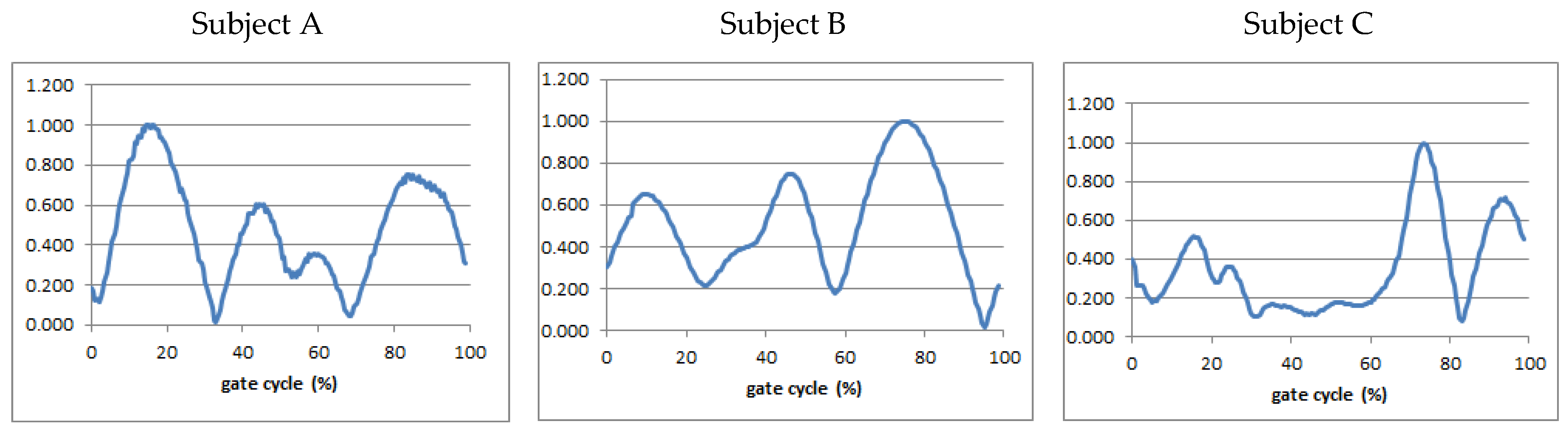
3.3. Ankle EP Velocity
3.4. Relationships between Shoe Preference and Ankle EP Velocity
4. Discussion
5. Conclusions
Funding
Conflicts of Interest
References
- Nigg, B.M.; Baltich, J.; Hoerzer, S.; Enders, H. Running shoes and running injuries: Mythbusting and a proposal for two new paradigms: ‘preferred movement path’ and ‘comfort filter’. Br. J. Sports Med. 2015, 49, 1290–1294. [Google Scholar] [CrossRef]
- Kong, P.W.; Miranda, B. Shoe preference based on subjective comfort for walking and running. J. Am. Podiatr. Med Assoc. 2010, 100, 456–462. [Google Scholar]
- Hardin, E.C.; Van den bogert, A.J.; Hamill, J. Kinematic adaptations during running: Effects of footwear, surface, and duration. Med. Sci. Sports Exerc. 2004, 36, 838–844. [Google Scholar] [CrossRef]
- Miller, J.E.; Nigg, B.M.; Liu, W.; Stefanyshyn, D.J.; Nurse, M.A. Influence of foot, leg and shoe characteristics on subjective comfort. Foot Ankle Int. 2000, 21, 759–766. [Google Scholar] [CrossRef]
- Hislop, H.J. Daniels and Worthingham’s Muscle Testing; Saunders: Los Angeles, CA, USA, 2013. [Google Scholar]
- Okamoto, H.; Kogawa, D.; Kishimoto, S.; Ito, K. Diversity of shoe preference—preferred ride feel for each runner. Footwear Sci. 2019, 11, 102–103. [Google Scholar] [CrossRef]
- Watanabe, E.; Oku, T.; Hirai, H.; Yoshikawa, F.; Nagakawa, Y.; Kuroiwa, A.; Grabke, E.P.; Uemura, M.; Miyazaki, F.; Krebs, H.I. Exploiting invariant structure for controlling multiple muscles in anthropomorphic legs: II. experimental evidence for three equilibrium-point-based synergies during human pedaling. In Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), Cancun, Mexico, 15–17 November 2016; pp. 1167–1172. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Definition | Motor Function |
|---|---|---|
| Hip-joint equilibrium-point (EP) extension | ||
| Hip-joint EP extension and knee-joint EP flexion | ||
| Knee-joint EP extension | ||
| Ankle-joint EP extension | ||
| Hip-joint stiffness increase | ||
| Hip- and knee-joint stiffness increase | ||
| Knee-joint stiffness increase | ||
| Ankle-joint stiffness increase |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kogawa, D.; Hirai, H.; Okamoto, H. Classification of the Runner’s Preferences in Running Shoes Based on Equilibrium-Point-Based Muscle Synergies. Proceedings 2020, 49, 85. https://doi.org/10.3390/proceedings2020049085
Kogawa D, Hirai H, Okamoto H. Classification of the Runner’s Preferences in Running Shoes Based on Equilibrium-Point-Based Muscle Synergies. Proceedings. 2020; 49(1):85. https://doi.org/10.3390/proceedings2020049085
Chicago/Turabian StyleKogawa, Daisuke, Hiroaki Hirai, and Hideya Okamoto. 2020. "Classification of the Runner’s Preferences in Running Shoes Based on Equilibrium-Point-Based Muscle Synergies" Proceedings 49, no. 1: 85. https://doi.org/10.3390/proceedings2020049085
APA StyleKogawa, D., Hirai, H., & Okamoto, H. (2020). Classification of the Runner’s Preferences in Running Shoes Based on Equilibrium-Point-Based Muscle Synergies. Proceedings, 49(1), 85. https://doi.org/10.3390/proceedings2020049085