1. Introduction
A road bicycle race is a sporting event that entails racers traveling long-distance courses of flat land, uphill and downhill, competing for the order of arrival or minimum course traversal time. In sections of flatland and uphill, the physical ability to pedal for a long time, as well as the skill of doing so efficiently to conserve energy, are needed. Therefore, most current training tools used by road racers, such as pedaling sensors or bicycle rollers, are designed to improve physical abilities.
On downhill sections, instead of simply pedaling and accelerating, the skill of traveling quickly yet safely is needed. This skill is especially important in downhill corners, because falling accidents most frequently occur due to movement at excessive speed and inability to complete the turn of a corner. However, improving this skill is difficult because training at a high speed on downhill corners is dangerous. As for studies on the improvement of performance on downhill sections, a 3D mannequin of a cyclist in a riding posture on a bicycle was produced and wind tunnel experiments were conducted to develop a skin suit that has the function of reducing air resistance [
1]. Additionally, in pursuit of a training method for improving the skill, sense-control training of ground reaction force in mountain bike cornering was investigated [
2]. However, few studies focused on training actual downhill corners have been conducted, although some are being developed.
To address these issues, in a previous study, the authors’ research group devised a method with an automatic speed control device to improve the stepwise downhill corner skill in the actual environment. In this study, with the goal of supporting the development of rider skill in controlling the angle of their bike, we worked on technological development for a diagnostic system to indicate the appropriate angle of a bike for traversing corners, based on a method that used an automatic speed control device.
2. Method
The downhill cornering skill comprises three individual skills, namely hazard prediction and state judgment; attitude control; speed control. All of these must be developed to improve cornering ability [
3,
4]. In our previous study, we devised a method to train the former two skills by keeping the speed constant by means of an automatic speed control device and subsequently training the skill of speed control. This process was repeated while increasing the speed in stages. Some research on the influence of the device on cornering skills has revealed that subjects changed the lean of their bikes in response to increases in the speed. However, some beginners leaned their bikes more than the expert [
5]. Such excess of inclination can cause slips of the tires and falling accident.
From the above results, to support building the skill of controlling bike lean, the authors focused on indicating the optimal timing at which to start to lean and the appropriate inclination of the bike. For this study, we designed and developed a system that functions to detect the entrance of corners for ensuring optimal timing and calculating the appropriate inclination of bike while cornering.
First, with respect to concerning with the positioning method, the general global positioning system (GPS) is insufficient for high accuracy positioning because of its positioning error of approximately 5 m to 10 m [
6]. Therefore, we employed the RTK (Real Time Kinematic) positioning system in this study. With the RTK positioning system, a receiver and an antenna must be prepared for each standard position and mobile position. By taking the coordinate position of the standard position as a reference point, that of the mobile station is detected in real time. The positioning error of this system is approximately 1 cm to 10 cm [
6], so it is capable of more accurate measurements than the GPS positioning system.
Next, the present authors examined the method for calculating the theoretical inclination of the bike to indicate the appropriate angle according to the traveling position in a corner. Considering the balance of the moment of centrifugal force and gravity force around the tire ground-contact point, the theoretical inclination of
can be calculated, as shown Equation (1), with the radius of the corner
and the velocity of the bike
:
The value of was calculated from the data of the RTK positioning system and was obtained by measuring the actual velocity of the bike. Furthermore, the function to compare the theoretical inclination and actual inclination was also developed within the system.
3. System Development
Concerning the positioning method, at first, the coordinates of the standard position had to be determined. For the positioning of the downhill course specified in this study, we set the antenna (KOMINE MUSEN DENKI, QZG1a, Antenna Gain ≥4.5 dBic) in a position without obstruction such as trees or buildings, and measured its position for approximately 40 min to obtain a “FIX solution”, corresponding to highly accuracy positioning. Meanwhile, the antenna for the mobile positioning was attached to the helmet that the rider wore. Additionally, because the positioning data were the output in terms of the world geodetic system, this was converted into XY coordinate data for the complementary system, and is described below.
For the calculation of the theoretical ideal angle, the velocity was obtained by measuring the revolution speed of the wheel with a rotary encoder that was placed on the rear wheel. Then, the radii of the corners were calculated from the positioning data obtained from the experiments. In the future, we aim to use the coordinate data of the existing map. In this study, to ensure safety during the experiments, we utilized a downhill corner at our university campus, considering traffic density and pedestrians, and used the positioning data obtained in advance. To delineate the course of travel for each trial, we drew markers on the ground of the course with water-based chalk and instructed subjects to follow them during the experiments. To standardize the position, we measured the downhill course three times with the RTK system by walking it and applied the fifth Fourier approximate curve to these three results and re-sampled them in units of 0.1 m to calculate the average. In this study, we treated this average curve as the standard of the specified course.
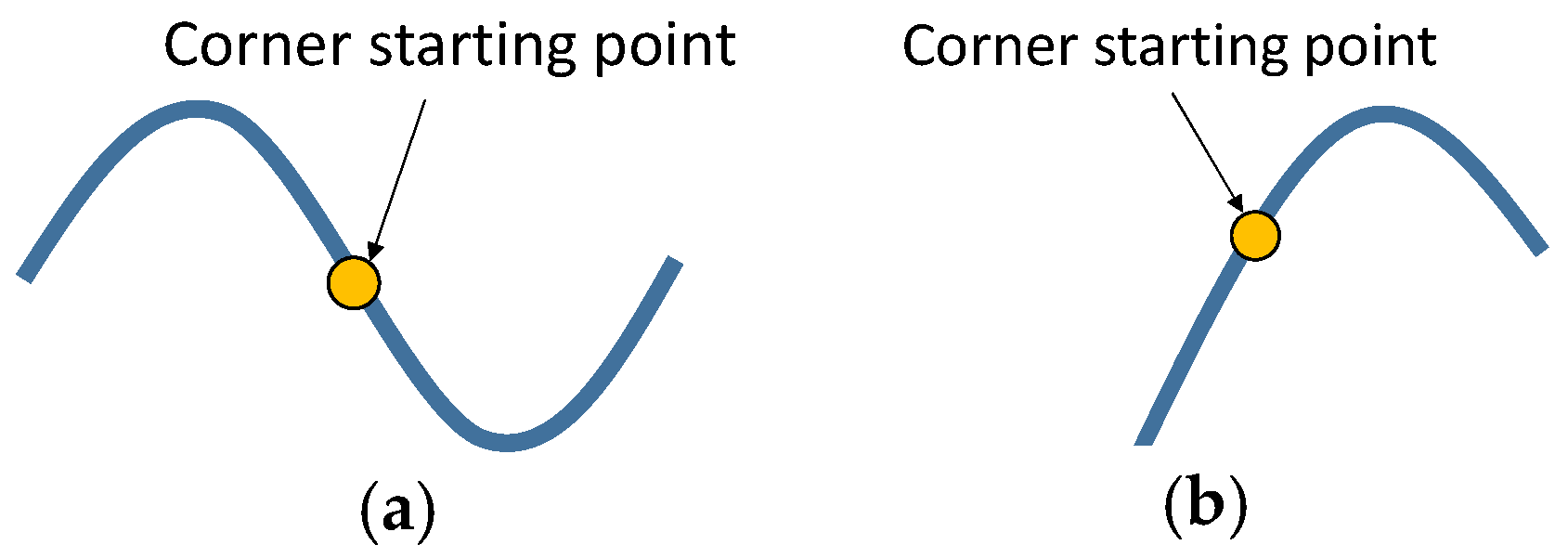
To determine the optimal position to commence leaning of the bike, we specified the corner starting points. In the case where corners were continuous, as shown in
Figure 1a, we treated the inflection points of the standard curve as the corner starting points. Meanwhile, when a corner was not continuous, as shown in
Figure 1b, we focused on the points where the second-order differential value obtained from the standard curve was constant.
Furthermore, in relation to the radii of corners for the calculation of the theoretical inclination, it was found that they did not change suddenly, and so we divided the course into some sections corresponding to radius, setting each corner’s starting point as a boundary. Additionally, for comparison with the theoretically-optimal inclination of the bike, the actual inclination was measured with an inertial sensor (LP-RESEARCH, LPMS-UTTL2 gyroscope: ±125/±245/±500/±1000/±2000 deg/s2) that was attached to the body of the bike.
In addition, we used the automatic speed control device developed for the previous study. The structure of this device was based on rim brakes and had a mechanism for opening and closing the caliper by pulling the wire attached to the top of the brake with a servo motor, as shown in
Figure 2. The rotation angle of the servo motor was controlled with the PID (Proportional Integral Differential) algorithm, based on the pulse number measured with the rotary encoder.
When we conducted the preliminary downhill cornering experiment with the RTK system, an interval occurred between the measured points. Hence, we complemented the positions obtained with the RTK system by using the velocity and traveling direction. The velocity was determined with the rotary encoder and the yaw angle was measured with the inertial sensor. To avoid the accumulation of errors over time, an algorithm was created as the flowchart, as
Figure 3 shows. When the RTK positioning was completed, the positioning result was recorded and updated as an XY coordinate and traveling direction. While the RTK positioning was not completed, it was complemented by adding the traveling vector obtained from the velocity and yaw angle to the previous positioning result.
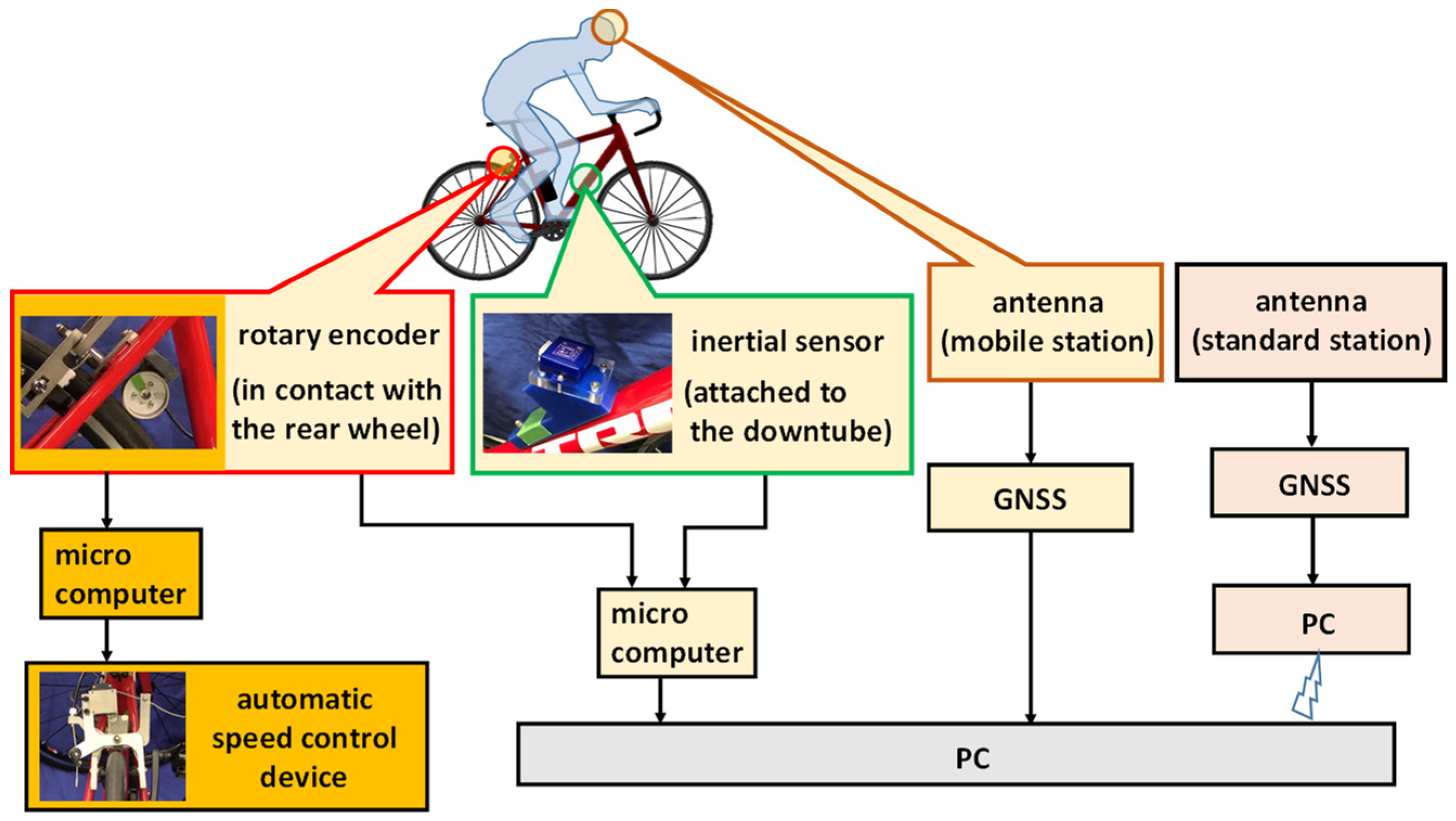
Figure 4 shows the system configured as stated above. The theoretical inclination was calculated with a PC using the positioning data and velocity.
4. System Evaluation
To survey the accuracy of the RTK positioning system, we calculated the distance between the standard curve and measured points that were farthest away from the curve in the normal direction.
Figure 5a shows the standard curve obtained with the RTK positioning system in advance by walking, while
Figure 5b shows the positioning result by bike with the complementary system. As a result, the maximum deviation from the standard curve was 0.38 m on foot and 1.24 m by bike. In addition, the maximum deviation occurred around the vertices of the corners.
Furthermore, to compare the theoretical bike inclination with an expert rider’s actual inclination, downhill cornering experiments by an expert were conducted in which the expert subject traveled the specified course while maintaining a speed of approximately 25 km/h according to the automatic speed control device. This speed was set with consideration given to safety.
Figure 6 shows the results of the comparisons. The course was divided into two parts; the radius of the former was 30 m and the latter was 50 m. According to these graphs, some similarities were found between the theoretical inclination calculated using Equation (1) and the expert rider’s actual inclination. In addition, in tackling the first corner, it was also found that the expert tended to start leaning the bike approximately 5 m short of the corner’s starting point. This value was obtained by calculating the distance between the positions where the expert started to lean the bike and the corner’s starting point.
5. Discussion
We consider the accuracy of the positioning system in this study. From the downhill cornering experiments by bike, we found that the deviation from the standard curve was 1.24 m at most. Because the width of the bike in the lateral direction was approximately 0.4 m, the positioning for a bike was considered adequate if the deviation from the standard curve in the normal direction was within approximately 0.2 m.
As a main cause of the positioning error, it seems that the antenna of the mobile position monitor also leaned when the bike did. Studies on the lean correction for RTK positioning measurements have reported that a lean of 2° to 3° causes an error of approximately 10 cm [
7]. In this study, the antenna of the mobile position monitor was directly attached to the helmet worn by the riders and the lean of the bike amounted to 15°. Hence, the lean of the antenna can be regarded as the main cause of the positioning deviation. To solve this issue, any device, such as a gimbal mechanism attached to the mounting portion of the antenna, is needed to constantly hold the antenna horizontal.
We considered the effectiveness of the system developed in this study using the traveling experiment. First, with regard to the points at which to start to lean a bike, the results of the expert rider’s inclination obtained in the downhill cornering experiments revealed that leaning of the bike began approximately 5 m short of the corner starting points. The expert rider seemingly began to lean the bike little by little before entering the corner because a sudden change could cause a loss of balance. In addition, concerning the inclination, some similarities were found between the theoretical inclination calculated from Equation (1) and the actual inclination of the expert rider. Therefore, we considered that it would be possible to indicate almost the same inclination as skilled cyclists by calculating the radius of corners in advance and measuring the bike’s velocity.
6. Conclusions
There are few training methods or tools that aim to build upon downhill cornering skill in road bicycle races. In this study, as a technological development for the support of building upon the controlling skill of bike angle, we consider the indication of the points to start to lean the bike and its appropriate inclination. Hence, we developed a system to detect the corner starting point, to calculate the theoretical inclination and to compare it with the expert’s actual inclination. The positioning measurement was conducted with the RTK system and the theoretical inclination calculated from the velocity and radii of the corners.
From the experiment with a skilled cyclist, we found that the expert rider started to lean the bike 5 m short of the corner’s starting point, and there were similarities between the theoretical inclination and the expert’s actual value at a speed of approximately 25 km/h. From the above, in that speed area, the functioning of the system constructed in this study was developed. The adaptation to higher speed areas in actual races and establishing a training method that joins the measuring system and the device, which indicates the body motion during cornering, are prospects to be considered in the future.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}