Quantification of a Ball-Speed Generating Mechanism of Baseball Pitching Using IMUs †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
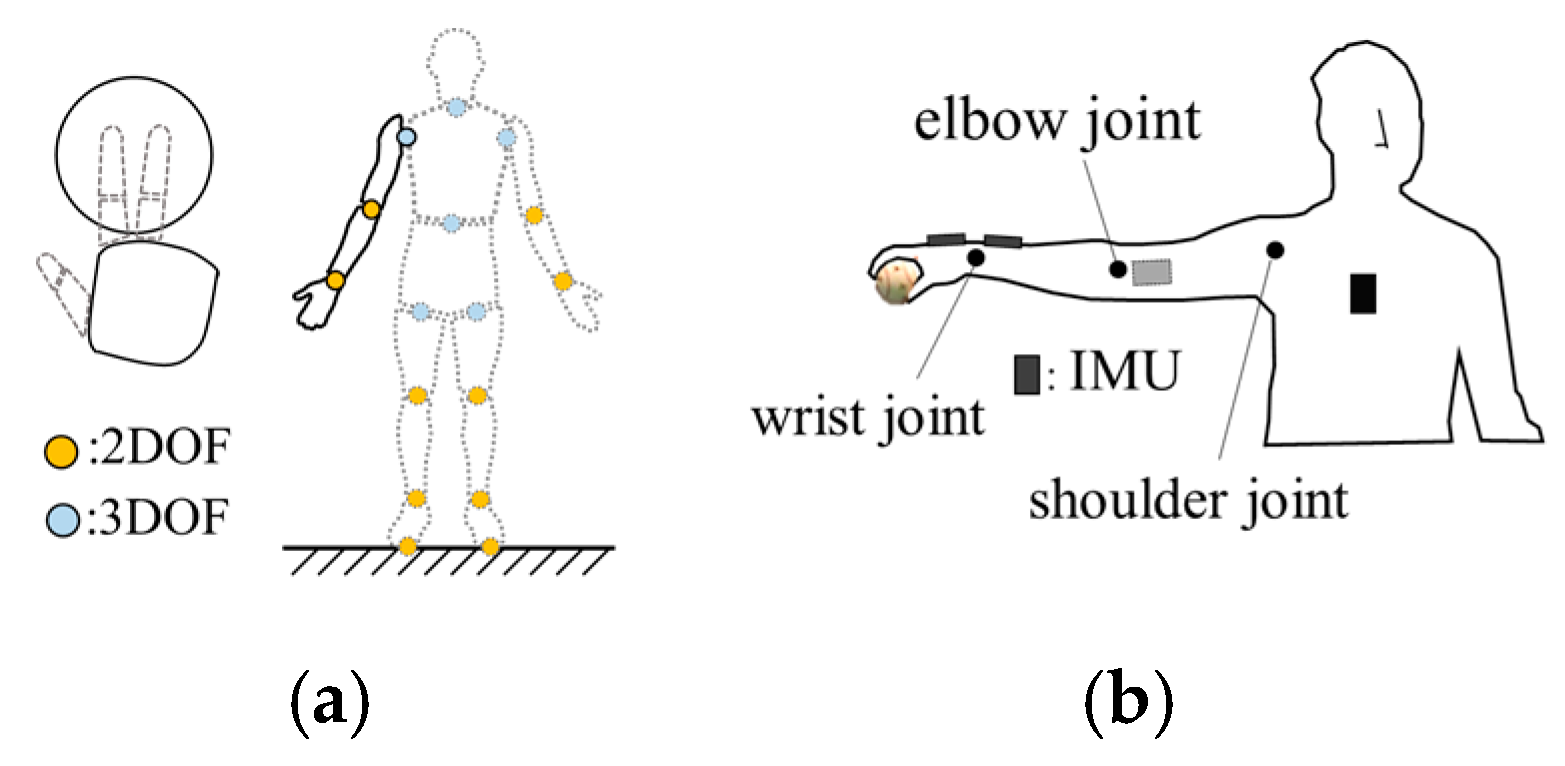
2.1. Data Collection
2.2. Dynamical Model of Upper Limb Segments with a Ball
2.3. Reconstructing Motion Data Using IMU Output Signals
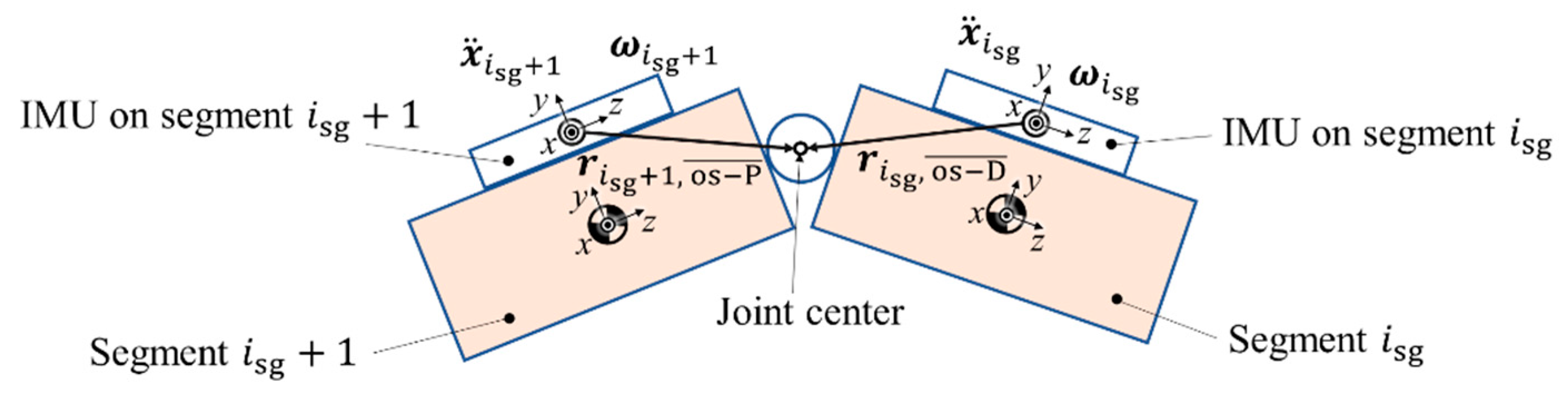
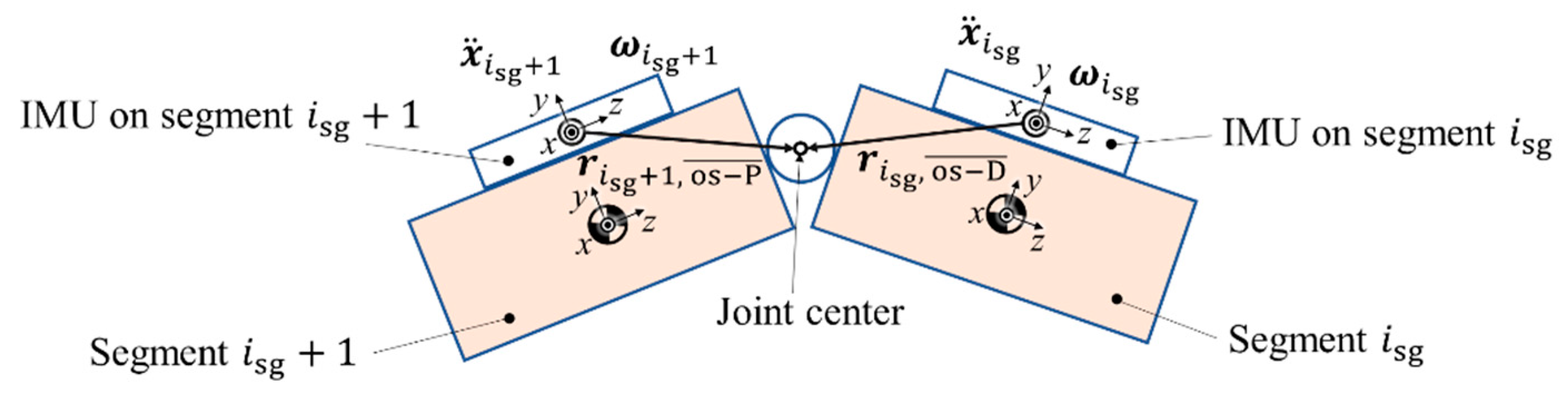
2.3.1. Geometric Constraint Relationships between IMUs’ Sensor Outputs
2.3.2. Parameter Identification of the Initial Orientation Matrix of Segments
2.4. Equation of Motion for the Body and Ball System
2.5. Contributions to the Ball Speed
3. Results and Discussions
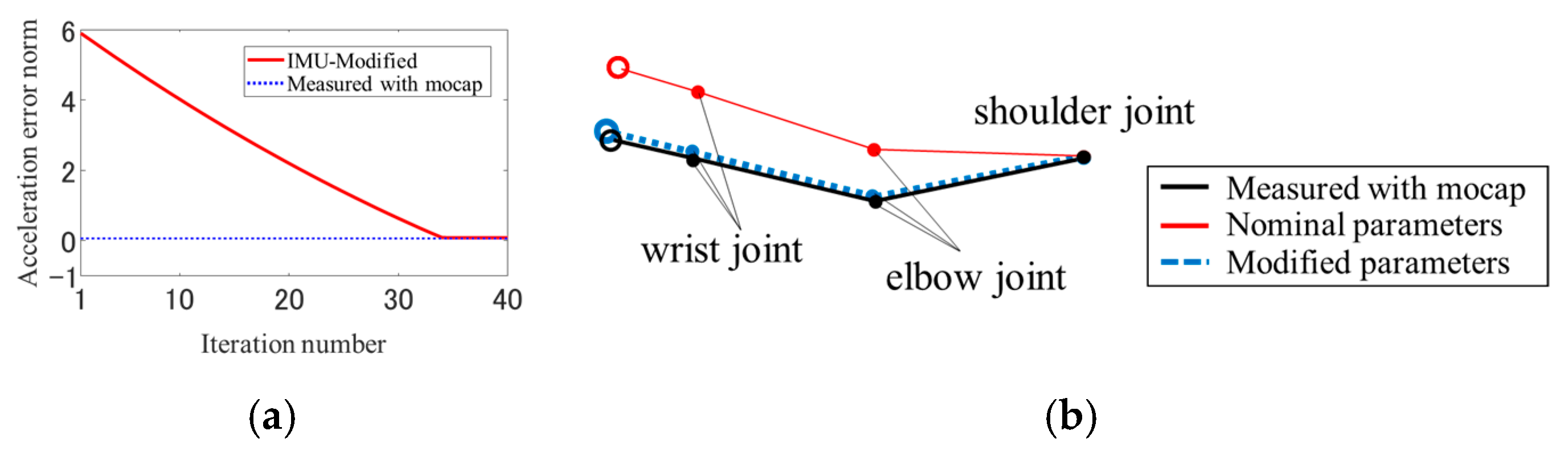
3.1. Iterative Calculation in Parameter Identification
3.2. Contributions to the Ball Speed
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Koike, S.; Uzawa, H.; Hirayama, D. Generation mechanism of linear and angular ball velocity in baseball pitching. Procedia Eng. 2018, 2, 206. [Google Scholar]
- Naito, K.; Maruyama, T. Contributions of the muscular torques and motion-dependent torques to generate rapid extension during overhand baseball pitching. Procedia Eng. 2008, 11, 47–56. [Google Scholar] [CrossRef]
- Hirashima, M.; Yamane, K.; Nakamura, Y.; Ohtsuki, T. Kinetic chain of over arm throwing in terms of joint rotations revealed by induced acceleration analysis. J. Biomech. 2008, 41, 2874–2883. [Google Scholar] [CrossRef] [PubMed]
- Berkson, E.; Aylward, R.; Zachazewski, J.; Paradiso, J.; Gill, T. IMU Arrays: The biomechanics of baseball pitching. Orthop. J. Harv. Med. Sch. 2006, 8, 90–94. [Google Scholar]
- Roetenberg, D.; Luinge, H.; Slycke, P. Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors; Xsens Technologies B.V.: Enschede, The Netherlands, 2009. [Google Scholar]
- Koike, S.; Ishikawa, T.; Willmott, A.P.; Bezodis, N.E. Direct and indirect effects of joint torque inputs during an induced speed analysis of a swinging motion. J. Biomech. 2019, 86, 8–16. [Google Scholar] [CrossRef] [PubMed]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koike, S.; Tazawa, S. Quantification of a Ball-Speed Generating Mechanism of Baseball Pitching Using IMUs. Proceedings 2020, 49, 57. https://doi.org/10.3390/proceedings2020049057
Koike S, Tazawa S. Quantification of a Ball-Speed Generating Mechanism of Baseball Pitching Using IMUs. Proceedings. 2020; 49(1):57. https://doi.org/10.3390/proceedings2020049057
Chicago/Turabian StyleKoike, Sekiya, and Shunsuke Tazawa. 2020. "Quantification of a Ball-Speed Generating Mechanism of Baseball Pitching Using IMUs" Proceedings 49, no. 1: 57. https://doi.org/10.3390/proceedings2020049057
APA StyleKoike, S., & Tazawa, S. (2020). Quantification of a Ball-Speed Generating Mechanism of Baseball Pitching Using IMUs. Proceedings, 49(1), 57. https://doi.org/10.3390/proceedings2020049057